开关磁阻电机直接转矩模糊PI控制器设计
2010-06-21王勉华梁媛媛
王勉华,梁媛媛
(西安科技大学 电气与控制工程学院,陕西 西安 710054)
1 引言
但是由于开关磁阻电机具有严重的非线性及变结构、变参数等特点,常规固定参数的PI控制难以获得理想的控制性能指标,并且控制参数由于没有精确的数学模型而难以确定。
模糊控制是目前工程领域应用较多的一种智能控制方法,它把人的手动控制经验转化为控制策略,它不需要建立被控对象的精确数学模型,而且动态品质优于常规的控制方法[1]。
但是双输入单输出的模糊控制器实质上是一个PD调节器,静态性能不好,存在静差,为了克服这个问题,本文提出模糊PI复合控制方法,加入积分作用克服静差。仿真结果表明,这种复合控制方法优于常规单一的模糊调节器或者PI调节器。
2 开关磁阻电机工作原理
三相(6/4)结构开关磁阻电机定转子为双凸极结构,转子无绕组,也无永磁体,定子极上有集中绕组,对应磁极的绕组相互串联,形成 A,B,C三相绕组。当某相绕组通电时,就产生一个使邻近转子极与该绕组轴线相重合的电磁转矩,顺序对三相绕组通电,则转子可以连续转动,改变通电次序,可改变电机的转向,控制通电电流的大小和通断时间,可改变电机的转矩和速度。
3 模糊PI控制系统构成
开关磁阻电机调速系统由控制器、功率变换器和SRM电机本体构成,本文中控制器采用双闭环控制(如图1所示),外环是速度环,内环是转矩环,其中速度环的作用是对速度进行调节,得到转矩内环的参考转矩。转矩内环对转矩误差、磁链误差和区间信号应用直接转矩控制原理进行功率变换器的开关选择[2],选择的开关信号用于控制功率变换器中开关元件的通断,为电机各相提供能量。
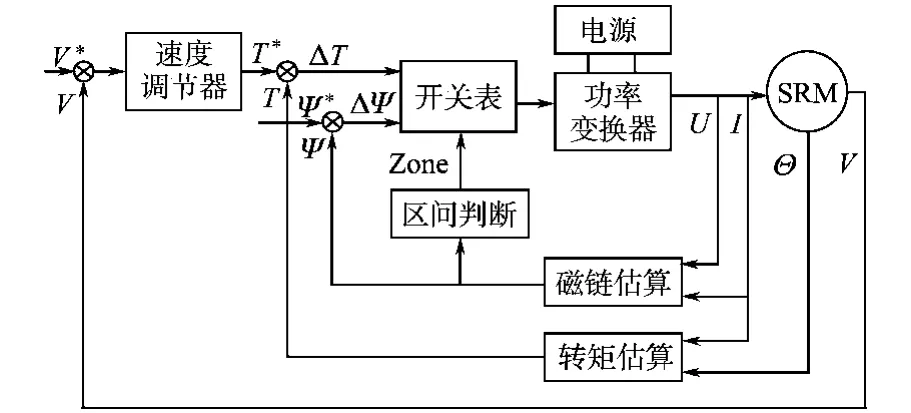
图1 开关磁阻电机系统结构图Fig.1 T he switched reluctance motor drive system
4 模糊PI速度调节器设计
模糊PI复合控制是在模糊控制的基础上加入了积分的作用,其结构框图如图2所示,系统的输入是给定速度与检测速度的误差e=V*-V及其误差变化de,系统的输出是转矩内环的参考转矩,由此构成双输入-单输出的二维模糊控制器。由于输入量在进行模糊化时,模糊控制器会把某些小的误差看作“零”,所以出现控制盲区,难以达到较高的控制精度,系统有静差。所以本系统在速度误差小的时候切换到常规PI控制,对模糊控制盲区进行控制,并为系统加入积分作用。两种控制方式的切换时刻依速度误差的大小而定。

图2 模糊-PI控制器结构图Fig.2 T he fuzzy-PI controller of speed control device
4.1 精确量的模糊化与反模糊化
本文的调速目标是要电机转速稳定在800 r/min,所以速度误差及速度误差变化的基本论域均取为[-800,800],根据开关磁阻电机特性,参考转矩的基本论域取[-200,200]。输入(E、EC)、输出(U)的模糊论域均取为[-6,6]。所以比例因子分别为:ke=6/800,kec=6/800,ku=200/6。模糊及反模糊化公式为
(3)域之间的映射。它是以人们对组群中的物体(objects in groups)的数量顿识和数数的经验为基础的。[2]55

为了简单起见,隶属度函数均取三角函数,语言变量的模糊子集为“NB(负大),NM(负中),NS(负小),ZE(零),PS(正小),PM(正中),PB(正大)”。
4.2 模糊控制规则
根据人工操作经验,控制规则可以用语言表示如下。
1)如果电机转速高于800 r/min,那么应该减少参考转矩。若转速高出的越多,则参考转矩减少的也越多。
2)如果电机转速等于800 r/min,则参考转矩保持不变。
3)如果电机转速低于800 r/min,那么应该增加参考转矩。若转速低下去的越多,则参考转矩增加的也越多。
把这些语言控制规则用表1表示出来。
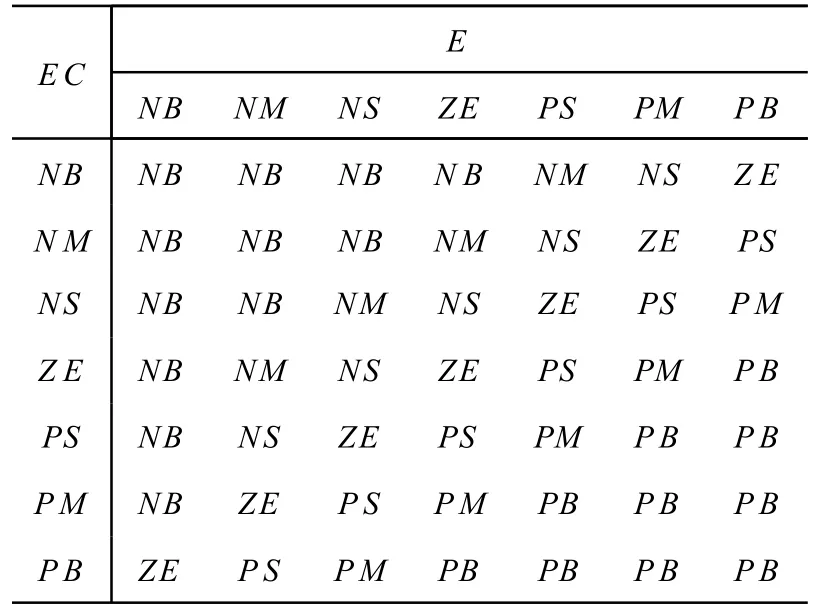
表1 模糊控制规则表Tab.1 Fuzzy logic control rules
在表1中,每一行和每一列的交叉点都是一条模糊规则“If Ai And Bj,then Cij”(其中 Ai,Bj,Cij分别表示E,EC和U的对应语言值)。
4.3 模糊推理与模糊判决
模糊推理采用Mamdani推理方法,输出信息的模糊判决采用“重心法”,也即“加权平均法”:

式中:Ui是模糊输出的一个语言变量;μC(Ui)是Ui对应的隶属度。
为了满足实际控制过程中快速性的要求,一般采用离线计算方式[3],把输入数据离散化,模糊推理、合成、判决等进行离线计算,把模糊判决的结果统计成表2,供实时处理时查表使用。

表2 模糊控制决策表Tab.2 Fuzzy logic control decision
以E=5,EC=1为例说明表2中离散计算处理的过程。
1)由E和EC的隶属度函数可以算出,E,EC分别只属于两个语言变量,隶属度分别为:μPM(E=5)=0.5,μPB(E=5)=0.5,μZE(EC=1)=0.5,μPS(EC=1)=0.5。对于其它语言变量的隶属度均为零。
2)由控制规则表1可以看出,当E和EC只属于两个语言变量时,只有4条语言规则起作用:

3)使用Mamdani推理方法进行推理,得出输出量对各语言变量的隶属度:

4)由式(2)得出输出量的模糊值:
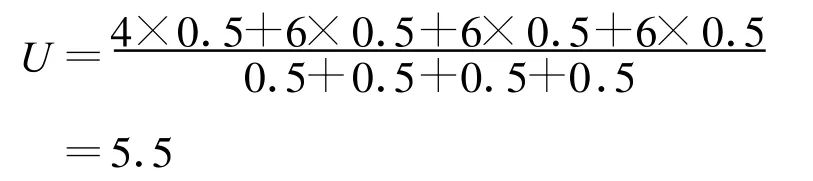
至此完成一次计算。依此方法,可以离线计算出表2中的所有数据[4]。
4.4 模糊PI复合控制仿真实现
从输入精确量的模糊化公式(1)中可以看出,当误差E=int(e◦ke+0.5)=0时,有|e◦ke|<0.5,即e<67。可见,当速度误差为67 r/min时,模糊控制器将认为偏差为零,不再对其进行调节,会造成系统大的稳态误差。所以,设想把模糊控制与PI控制器相结合,发挥模糊控制与PI控制各自的长处,取长补短。
模糊PI控制的仿真结构图如图3所示,用开关Switch来切换模糊控制与PI控制,当速度误差大于67 r/min时,通过Switch选择上面的模糊控制方法进行控制,PI控制的输入为零,不起作用;当速度误差小于67 r/min时,通过Switch选择下面的PI调节器进行控制。这样既对控制的盲区进行了控制,也为系统加入了积分作用,消除了系统稳态误差,而且切换开关延迟了积分作用,有效减少了系统的动态超调量。
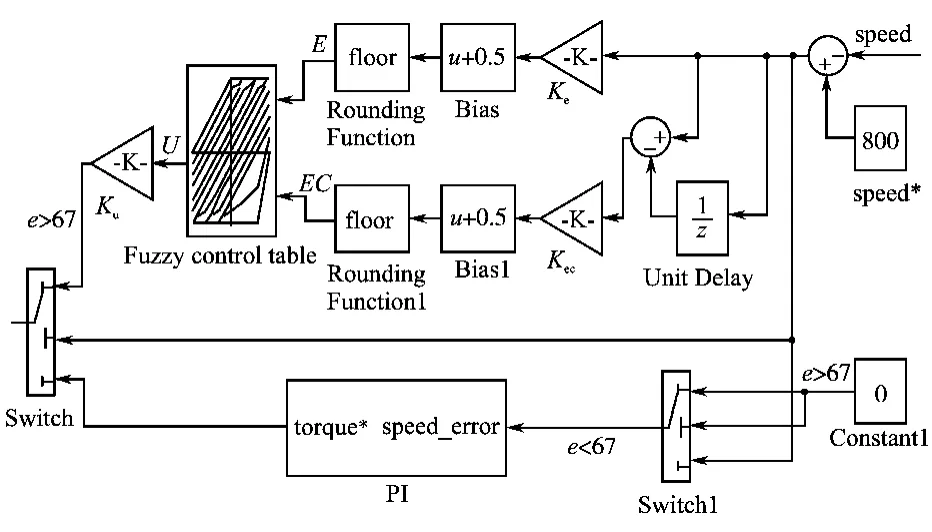
图3 模糊PI控制器的Matlab实现Fig.3 The fuzzy-PI controller in matlab
5 仿真结果及分析
60 kW三相6/4结构的开关磁阻电机,给定转速800 r/min,电机稳速运行时,于0.4 s加入大小为12 N◦m的负载,并于0.75 s卸掉此负载,要求电机的速度能一直稳定在800 r/min。为了与其它的速度控制器进行比较,仿真时速度控制器分别采用了PI控制、模糊控制与模糊PI复合控制方法,速度响应曲线如图4所示。局部速度响应曲线如图5所示。

图4 速度响应曲线Fig.4 Speed response curves
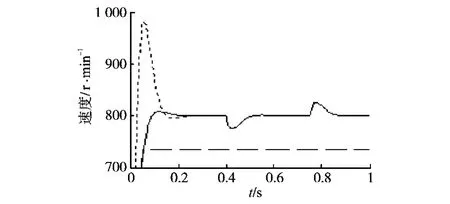
图5 局部速度响应曲线Fig.5 Part speed response curves
经过计算得到各控制方法的动静态性能指标如表3所示。

表3 各控制方法的性能指标Tab.3 Performance index of each control method
从图4及表3中可以看出,模糊PI控制具有很好的抗干扰能力,稳态无静差。解决了单一调节器调节时间与超调的矛盾,动静态性能均优于单一的调节器。
这个调速系统的内环采用直接转矩控制原理对转矩进行直接控制,给定磁链为0.36 Wb,系统的输出转矩曲线如图6所示,转矩脉动仅为±1 N◦m,有效地减少了系统的转矩脉动。(由于SRM的摩擦系数是0.02 N◦m◦s,所以输出转矩应该大于负载转矩 0.02×800×2π/60=1.67N◦m 。)

图6 转矩曲线Fig.6 T orque curve
6 结论
模糊控制把人们的控制经验转化控制策略,使用语言方法,可以不需要掌握精确的数学模型,并且动态响应品质优于常规的PI控制。开关磁阻电机是个非线性的系统,电机模型很难精确地确定出来,所以采用模糊控制是个很好的选择。但是模糊控制在控制策略上存在一个很大的弊端就是稳态有静差,对于恒值系统的内外部干扰基本无抵抗能力。所以本文采用模糊PI控制,把两种控制结合起来,在速度误差大的时候采用模糊控制,在速度误差小的时候采用PI控制,很好地解决了响应时间与超调的矛盾,系统动静态性能良好,并且保证了系统的抗干扰能力。
[1]何莉,万沛霖,肖蕙蕙.PID型模糊控制器在开关磁阻电机驱动系统中的应用[J].中小电机,2004,31(4):32-35.
[2]Adrian David Cheok,Yusuke Fukuda.A New Torque and Flux Control Method for Switched Reluctance Motor Drives[J].IEEE T ransactions on Power Electronics,2002,17(4):543-557.
[3]詹琼华,殷春辉.查表型模糊控制器在SR调速系统中的应用与优化[J].微电机,2006,39(4):4-7.
[4]殷春辉,詹琼华,孙剑波.开关磁阻电机驱动系统模糊控制器的设计与仿真[J].微电机,2006,39(5):1-5.
[5]Liu Chao-ying,Hou Xue-chuan,Cui Yu-long,et al.Research for Speed Controller of Switched Reluctance Motor Using F-PID Control[C]∥Proceedings of the Second International Conference on M achine Learning and Cybernetics,2003(25):2530-2533.
[6]王勉华.开关磁阻电机多种控制策略的仿真比较研究[J].系统仿真学报,2007,19(20):4845-4847.
