变速恒频双馈风力发电机组交流励磁控制系统研究
2010-08-15鲍薇尹忠东任智慧
鲍薇,尹忠东,任智慧
(华北电力大学 电力系统保护与动态安全监控教育部重点实验室,北京 102206)
1 引言
目前我国的风电场装机绝大多数是恒速恒频机组。而国外风电领域,变速恒频机组已经成为主流,以双馈风力发电机组为主[1~3]。
采用变速恒频双馈风电机组,风力机可以根据不同的工况变速运行,实现最大风能追踪,工作效率高。双馈型发电机的最大特点是在发电机转子侧进行交流励磁,发电系统可根据风力机的转速变化调节励磁电流的频率,实现恒频输出;通过改变励磁电流的幅值和相位实现发电机有功、无功功率的独立调节。这样,双馈型风力发电机组转子侧的电力电子变换器只要控制总能量的一小部分(20%~30%),也就是转差功率和换流器需要控制总功率的直驱型风力发电机系统相比,电力电子变流器的损耗可以减小,变流器的造价降低。基于以上优点,交流励磁风力发电系统(AEVSCF)的研究备受关注[1~2]。
AEVSCF风力发电系统规模庞大,运行控制系统复杂,其中发电机的交流励磁系统及其控制是核心部分,决定着整个系统的运行性能。本文对AEVSCF风力发电励磁系统的拓扑结构和控制策略进行了介绍,分别采用定子磁链定向和电网电压定向矢量控制技术,推导了双馈型异步发电机(doubly-fed induction generator,DFIG)及网侧变换器的控制策略。最后通过EMTDC/PSCAD软件对整个风力发电系统在10 k V线路上并网运行的动态模型进行了建模仿真,仿真表明,采用本文介绍的控制策略,能实现风力发电系统的最大风能追踪及有功无功解耦控制,保证输出功率稳定,实现高功率因数并网运行。
2 基本结构和运行原理
变速恒频控制技术的风力发电系统主要由风力机、齿轮箱、双馈发电机、变频器励磁系统、控制检测系统组成,如图1所示。

图1 交流励磁变速恒频风力发电系统Fig.1 AC-excited variab le-speed con stan t-frequency wind power gen eration sy stem
DFIG定子接电网,转子接励磁变换器,通过变频器改变转子励磁电流的频率、幅值和相位,实现“交流励磁”。
对双馈电机,有

式中:f1,f2为 DFIG定、转子电流频率;n m为DFIG机械转速;p n为DFIG极对数。
由式(1)可知,当发电机转速变化时,调节转子励磁电流频率可保持定子输出电能频率恒定,这就是“变速恒频”的原理。
忽略损耗时,DFIG转子输入有功功率为

式中:P1为DFIG定子输出有功功率;s为转差率。
风机转速的不断变化引起s的不断变化。当0<s<1时,P2>0,发电机定子端向电网输出有功功率,电网通过变频器向转子回路馈入功率,此时DFIG亚同步状态运行;当s<0时P2<0,发电机定子端向电网输出有功功率,转子回路通过变频器向电网输入功率,此时DFIG超同步状态运行;当s=0时,P2=0,转子直流励磁,转子与电网间无能量交换,此时发电机同步状态运行。
DFIG转子励磁变换器由两个背靠背的PWM变换器(双PWM 变换器)构成,分别称之为转子侧变换器和网侧变换器(见图1)。转子侧变换器采用定子磁场定向控制技术,对DFIG进行励磁控制,可以在转速大范围变化的运行条件下,实现最大风能追踪控制和定子端口有功无功的解耦控制;网侧变换器采用电网电压矢量定向控制技术,实现直流环节电压和交流侧功率因数控制。通过改变两个变换器的工作状态(整流或逆变)能实现能量的双向流动,满足DFIG亚同步、超同步运行的需求。
3 转子侧PWM换流器控制策略
3.1 转子侧最大风能追踪控制机理
变速风力发电机受到两个基本限制,即功率限制和转速限制。在额定风速以下,总的控制目标是充分利用风能,最大限度的捕获风能,主要靠调节转子转速实现。在达到额定风速以上,双馈变速恒频机组的控制目标就成了限制风电机组的输出功率,使功率输出在额定值,主要靠调节浆距角实现,转子转速不变。
发电机转子侧的一个重要控制目标是实现最大风能追踪,首先对风力机的最大风能追踪控制机理进行简单介绍。
风力机捕获的机械能为

风力机的机械转矩为

式中:ρ为空气密度;A为风轮扫风面积;c p为风能利用系数;v为空气进入风力机扫略面以前的风速;w w为风力机转速;R为风轮半径;λ为叶尖速比,λ=(w w R)/v。
由式(1)可以看出,在风速不变的情况下,风机所获得的机械能仅为风能利用系数c p的函数,且风能利用系数c p是叶尖速比λ和桨叶截距角β的函数。
由此可见,对于变化的风速v,需要有变化的风机转速ww相对应,才能保证叶尖速比λ为最佳叶尖速比λopt,风能利用系数cp为最大风能利用系数c p max,P m为P m max,而此时的T m为最佳转矩T mopt。
最大风能追踪的实质是风力机组的最佳转速控制,可以由风力机的桨距角调节系统完成,也可以由发电机的转子侧控制系统完成(此时认为桨距角β固定不变)。文献[2]提出了一种在转子侧通过DFIG功率控制来实现最大风能追踪的方案,通过控制DFIG输出有功功率来控制DFIG的电磁转矩,从而间接地控制机组的转速。该方案不需要风速的检测,控制结构简单,但是参考功率的计算较为复杂。本文采用直接转速控制方案,控制目标明确,原理简单。直接转速控制需要检测当前的风速,根据最佳叶尖速比计算出当前的最佳转速,进行转速的闭环控制。控制框图如图2所示。

图2 直接转速控制方案框图Fig.2 Block diagram of direct rotation speed control
3.2 转子侧有功无功解耦的矢量控制策略
在研究异步电机的多变量非线性数学模型时,常作如下假设:忽略空间谐波,忽略磁路饱和铁心损耗,不考虑频率变化和温度变化对绕组电阻的影响[2]。
在此假设下,双馈式发电机在同步旋转dq参考坐标系中的数学模型为如下5阶模型。
磁链方程:

电压方程:

电磁转矩表达式:

电机运动方程:

式中:ω1为坐标系旋转角速度,即同步转速;u,i,Ψ为绕组的电压、电流及磁链;R为绕组的电阻;L s,L r为定子绕组与转子绕组的自感;L m为定、转子绕组之间的互感;下标s,r分别代表电机的定子与转子;下标d,q分别代表电机的d,q绕组;ωs为电机的滑差角速度,p为微分算子,Tm为机械转矩,J为机组的转动惯量;D为与转速成正比的阻转矩阻尼系数(粘性摩擦系数)。
坐标变换矩阵采用恒功率正交变换矩阵。
双馈电机定子的有功功率P和无功功率Q为

一般假定电网为无穷大,电压和频率恒定,且不考虑定子磁链的动态过程,忽略定子绕组电阻,则定子磁链恒定,即:

发电机转子侧的PWM换流器采用基于定子磁链矢量定向的控制策略,即令d轴与定子磁链矢量方向一致(见图3)。
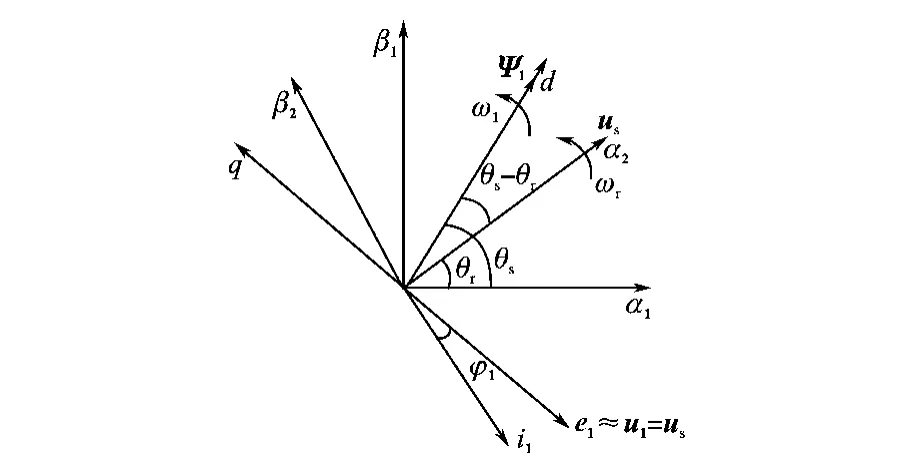
图3 转子侧矢量控制坐标变换Fig.3 Coordinate transform ation of rotor-side vector con trol
由于DFIG定子侧频率为工频,定子电阻远小于定子绕组电抗,可以忽略,因而DFIG感应电动势近似等于定子电压。因为感应电动势矢量e1落后 Ψ190°,故e1和定子电压矢量u1位于q轴的负方向。即:

定子端输出的有功无功功率分别为

式中:Ψ1为定子磁链合成矢量;u1为定子电压合成矢量。
这样感应电机模型由5阶降到3阶,这种3阶模型可将转子电压作为被控量,也可使用转子电流作为被控量来构建3阶控制模型,同时通过直接或者间接调节转子电流实现有功功率和无功功率的解耦控制。由这种模型设计的控制器在电网正常运行条件下可很好地快速实现电机控制。
当采用转子电压作为控制量来控制转子电流时,转子电压为

其中
式(12)可写为

式中:u′rd,u′rq为实现 转子电压 、电流解耦控 制的解耦项;Δu r d,Δu r q为消除转子电压、电流交叉耦合的补偿项。
将转子电压分解为解耦项和补偿项后,既简化了控制又能保证控制的精度和动态响应的快速性。
为保证DFIG有较高的功率因数,通常将无功功率的参考值设为0或者某一定值,有功功率参考值按变速恒频实现最大功率跟踪控制。不向电网吸收或提供无功功率或为保证功率因数向电网提供或吸收少量的无功功率。转子侧控制框图如图4所示。

图4 转子侧PWM换流器控制框图Fig.4 Control block diagram of rotor side PWM converter
4 网侧换流器的矢量控制策略
网侧变换器在实现能量双向流动的同时,控制着直流母线电压的稳定,以及对网侧的功率因数进行着调节。当电机亚同步速运行时,往转子中馈入能量,作整流器(rectifier)运行;当电机超同步速运行时,从转子中吸收能量,作逆变器(inverter)运行,将能量回馈到电网;当电机同步速运行时,相当于直流侧空载。网侧变换器的性能好坏直接影响到整个系统的性能。网侧换流器和转子侧相同均采用三相VS R换流器,结构如图5所示。
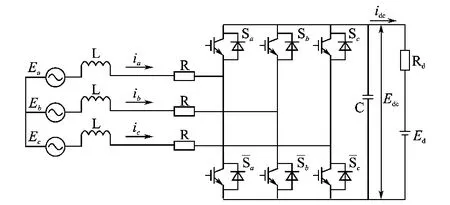
图5 三相VS R换流器结构图Fig.5 The structure of th ree-phase VSR converter
三相VSR换流器交流侧电压为

数学模型中d轴和q轴变量是相互耦合的,因而无法对dq轴的电流进行单独控制,对于控制器的设计也造成一定困难。为此,引入id,iq的前馈解耦控制,对Ed,Eq进行前馈补偿,且采用PI调节器作为电流环控制器,则有以下方程:

网侧换流器采用定子电压定向矢量控制,将dq坐标系中d轴定向于电网电动势矢量E的方向,则电网电动势矢量d轴与电网电动势矢量E重合,q轴分量为0,见图6。

图6 网侧矢量控制坐标变换Fig.6 Coordinate transformation of grid-side vector control
将式(14)代入式(13),则得到如下关系式:

因此,网侧PWM 换流器的控制框图如图7所示。
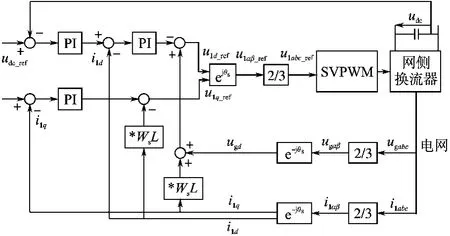
图7 网侧PWM换流器控制框图Fig.7 Control block diagram of grid-side PWM con verter
5 仿真研究
本文用EMTDC/PSCAD软件对一台2 MW的风电机组在10 k V线路上并联运行的动态模型进行了仿真分析。仿真参数如下。
双馈电机仿真参数为:额定功率2 MW,定子额定电压 690 V,额定频率 50 Hz,定子电阻0.0175(标幺值),转子电阻0.019(标幺值),定子漏感0.257(标幺值),转子漏感0.295(标幺值),定转子互感6.921(标幺值);电网参数为:额定功率20 MW,额定电压10 kV,额定频率 50 Hz;输电线路参数为:线路长度10 km,单位阻抗r=0.263(标幺值),x=0.348(标幺值)。
风速初始值为12 m/s,对应的最佳转速理论值为1.1(标幺值)。第4 s时,风速突变为14 m/s,根据最佳叶尖速比计算,转速指令相应的突变至1.283(标幺值)。风速波形如图8所示,总仿真时间为10 s。

图8 动态风速波形图Fig.8 The wave form of dynamic wind speed in simulation
为了能够使发电机快速平稳的过渡到稳定运行状态,本文中0~0.5 s时发电机转子闭锁,电机设为转速控制。0.5 s后系统进入稳态,转子解锁,电机转换为转矩控制,系统切换到风能捕获跟踪控制模式。
图9表示了该阶跃式风速下机组追踪最大风能的过程。图9a为在风力机的机械转矩和输出机械功率随风速变化的波形;图9b为电机的电磁转矩和机械转矩波形图;图9c为转子转速随风速变化波形,可以看出,采用本文提出的直接转速控制模式,当风速突变时,转速控制环对其进行快速稳定的调节,最终达到转速参考值,实现了最大风能的追踪控制。

图9 转子侧最大风能追踪控制仿真波形Fig.9 The largest w ind energy tracking of rotor side control′s simulation waveforms
双馈电机有功无功功率独立控制如图10所示。从图10a可以看出第4 s时,转子电流的有功分量发生了突变,而无功分量保持恒定。从图10b中可以看出定子输出的无功功率也保持不变,有功功率随风速的升高而增大,说明双馈电机在实现最大风能追踪控制的同时,也实现了定子有功无功功率的独立调节。

图10 有功无功解耦控制的动态仿真波形Fig.10 Decoupling control of active and reactive power′s dynamic simu lation wave forms

图11 定转子输出三相电流波形图Fig.11 Three-phase current wave forms of out put by stator and rotor-side converter
图11为在最大风能追踪控制策略下转子侧变频器及定子侧输出的三相电流波形。图11表明了在转速和有功功率都很好地追踪到了各自的给定值的前提下,转子侧的励磁电流和定子侧的输出电流都能得到及时的调节,系统的动态性能优越,响应快速,充分验证了控制方案的正确性和可行性。
6 结论
本文在分析双馈电机励磁系统工作原理的基础上,推导出了用转子电流的 dq分量独立解耦控制有功功率和无功功率的策略,构建了由转子有功、无功电流双独立通道电流内环和转速外环组成的双闭环PI控制系统,能够在追踪最大风能的同时实现有功无功功率的解耦控制。在PSCAD/EMTDC软件平台上,对该系统进行了数学建模和系统仿真研究,仿真结果验证了变速恒频风力发电系统控制策略的正确性,确实实现了最大风能捕获控制以及有功功率和无功功率的独立解耦控制,满足了风力发电系统的控制要求。
[1]Pena R,Clare J C,Asher G M.Dou bly Fed In du ction Generator Using Back-to-back PWM Converters and Its Application to Variable-speed Wind-energy Gen eration[J].IEEE Proc-electr.icpowerAppl.,1996,143(3):231-241.
[2]Li Shu hui,Timothy A Haskew.Analysis of Decoupled d-q Vector Controlin DFIG Back-to-back PWM Converter[C]∥power Engin eering Society GeneralMeeting,IEEE,2007:1-7.
[3]刘其辉.变速恒频风力发电系统运行与控制研究[D].杭州:浙江大学,2005.
[4]刘其辉,贺益康,张建华.交流励磁变速恒频双馈型异步风力发电机的稳态功率关系[J].电工技术学报,2006,18(2):12-18.
[5]Richard Gagnon,Gilbert Sybille.Modeling and Real-time Simulation of a Doubly-fed In duction Generator Driven by a Wind Turbine[C]∥Presented at the International Conference on Power Systems Transients in Montreal,Canada,2005:19-23.
[6]刘其辉,贺益康,张建华.交流励磁变速恒频双馈型异步风力发电机的稳态功率关系[J].电工技术学报,2006,18(2):12-18.
[7]罗忠玉,马洪飞,徐殿国,等.双馈风力发电系统网侧变换器控制研究[J].电力电子,2007(5):15-19.
