基于调制波移相的高压变频器4象限实现方案
2010-06-21李成博常东来沈传文郑翔
李成博,常东来,沈传文,郑翔
(1.西安交通大学 电气工程学院,陕西 西安 710049;2.北京动力源科技股份有限公司,北京 100070)
1 引言
单元串联型高压变频器在很多应用场合都需要实现电机的4象限运行。如果将电机回馈的能量用泄放电阻消耗掉,不仅浪费了能量,而且会对变频器的安全运行造成危害。理想的方法是通过前端的可控整流装置将电机回馈的能量回馈到电网,这时候必须做到两点:一是要稳住单元的母线电压;二是要使回馈到电网的电流相位与电网电压相位尽量保持180°,从而不对电网造成污染。针对单元串联型高压变频器的一般方法是给每个单元都加一个用于回馈的三相IGBT可控桥,并且每个单元都要加一个控制器来单独控制各自的回馈。这种方法成本比较高,并且因为结构复杂而使可靠性降低。本文在分析了单元串联型高压变频器4象限运行的机理和特点的基础上,提出了在回馈能量时,先用带有串连补偿环节的间接电流控制算法算出一个单元的三相回馈桥的调制波,然后通过调制波移相的方法算出其它单元的调制波。这种方法只需要一个控制器,具有成本低、控制简单的特点。
2 单元串联高压变频器能量回馈分析
4象限单元串联型高压变频器的电路拓扑有很多,图1是一种方案的功率单元的电路拓扑结构,并且每个单元的拓扑结构都一致。由二极管整流桥,三相回馈桥,H逆变桥组成。通过二极管整流桥整流建立起母线电压,电机处于电动状态时,三相回馈桥被封闭,由H桥实现各单元的串连逆变。当电机进入发电状态时,H桥的二极管起全波整流的作用,将再生能量转移到滤波电容中,使母线电压升高。当达到一定值后,开启三相回馈桥进行能量回馈。
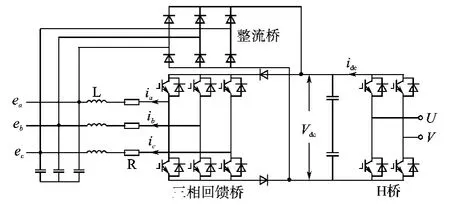
图1 功率单元的电路拓扑Fig.1 Topology of a cell with regenerative device
这时三相回馈桥的数学模型如下:
其中,Sa,Sb,Sc为三相桥臂的开关状态(1代表上桥臂开通,0代表下桥臂开通)[1]。
如三相回馈桥逆变侧只考虑基波电压,在稳态时有:
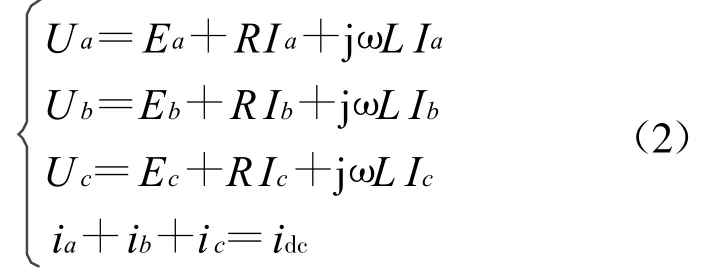
其中,Ua,Ub,Uc分别代表三相回馈桥输出的三相基波电压。这时的一个单元a相的矢量图见图2。

图2 单个单元三相回馈桥a相稳态矢量图Fig.2 Vector graph of a phase
分析整个单元串联高压变频器如图3所示,在此以5单元串联为例。如果后端H桥逆变的控制采用通常的水平移相调制方法,则各个单元的回馈能量是一致的,从而可以认为各个单元的母线电压是一致的。并且各个功率单元的结构是一样的,则R,L参数是相等的。所以各个单元的不同点在于进线侧电压 E的相位的不一致。故导致各个单元的矢量图是一样的,不同点只在于+15°单元 ,+30°单元,-15°单元 ,-30°单元是将0°单元的矢量图依次旋转 +15°,+30°,-15°,-30°。所以三相回馈桥逆变侧的基波相位依次相差15°。从而我们可以将0°单元算出的调制波依次移相 +15°,+30°,-15°,-30°得到+15°单元 ,+30°单元,-15°单元,-30°单元的调制波。这样我们就可以用一个控制器来同时控制5个单元的能量回馈。达到降低成本,简化结构的目的。
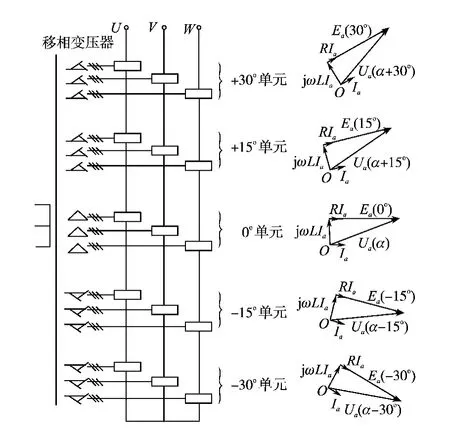
图3 5单元串联高压变频器结构及能量回馈矢量图Fig.3 Vector and structure graphs of all cells
3 单个单元能量回馈的实现
上面仅仅是对稳态时的情况进行了分析。我们知道,基于间接电流控制方法的能量回馈存在着电流响应速度慢和存在直流偏移量的问题。文献[2]提出了一种在三相可控整流中以串联补偿环节来加快电流响应速度的方法。我们可以将这种思路应用在能量回馈的控制中。
对式(1)进行Park变换,并且使d轴平行于电网电压矢量。则有在2r坐标系下的数学模型如下:
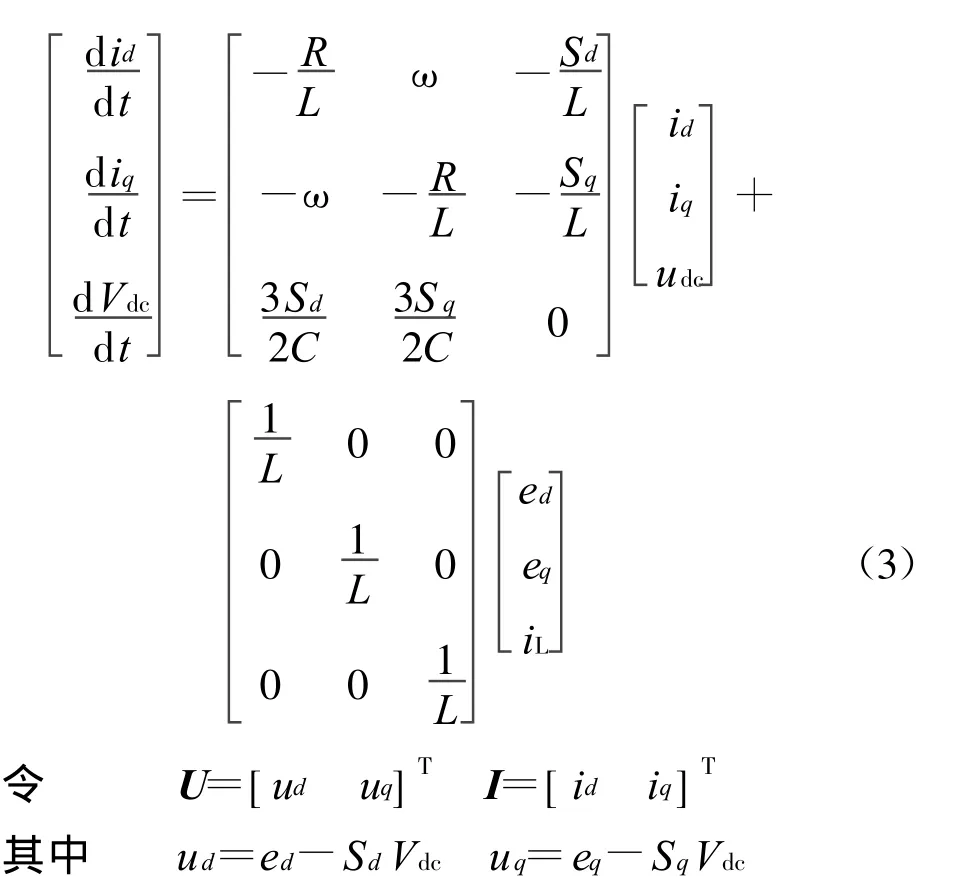
对式(3)进行拉氏变换有:

其中
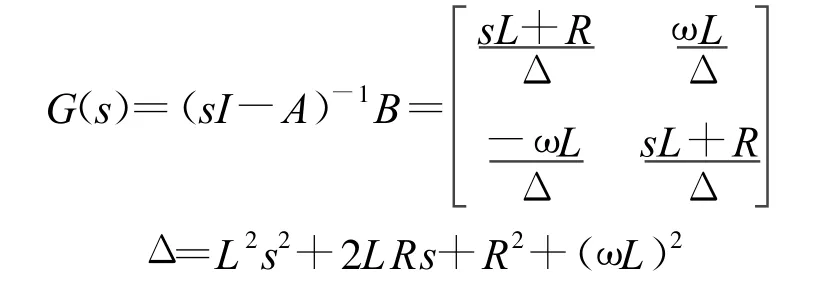
而间接电流控制的回馈算法是基于稳态模型的,即算出的调制波是基于稳态时的值i*d,i*q。可以推导出电流瞬态值id,iq与稳态值i*d,i*q的关系如下[2]:
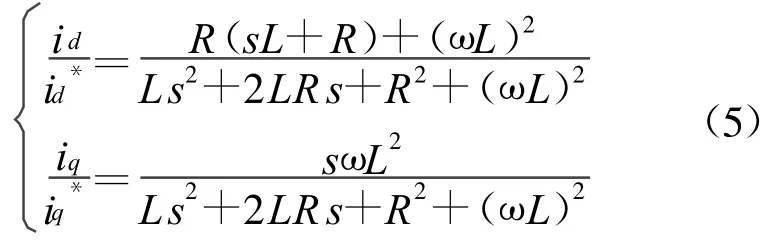
式(5)是一个典型的二阶振荡环节,这正是电流响应速度慢的原因。如果我们给稳态电流加上串联补偿环节,即令

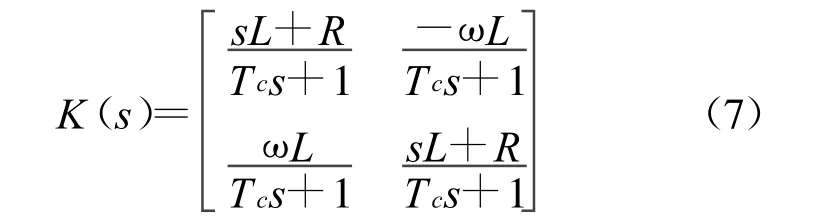
其中U*(s),I*(s)为稳态模型下的参数,K(s)=G-1(s)Q(s)。可以认为在一个载波周期母线电压不会发生变化,则有U*(s)=U(s),故将式(6)带入到式(4)中,有:

而我们可以在满足K(s)的物理可实现性的前提下人为的设置Q(s),从而使电流的动态特性变好。在此我们可以将串联补偿设置如下[3,4]:
4 基于调制波移相的4象限运行高压变频器结构的实现
系统结构如图4所示,整个控制部分由VdcPI调节、串连补偿、0°单元调制波生成部分、调制波移相和SVPWM调制构成。

图4 系统结构实现Fig.4 Structure of four-quadrant medium-voltage drive
5 仿真结果
根据以上系统结构,用Matlab/Simulink对系统进行了仿真。仿真条件如下:电网电压为三相线电压6 kV,50 Hz;变压器二次侧通过延边三角形输出5个单元,线电压均为700 V,移相角依次为+15°,+30°,0°,-15°,-30°;母线电压 850 V;交流侧等效电阻0.1 Ω;交流侧电感70mH;电机功率100 kW;4象限运行时回馈功率为50 kW。在开始上电后给母线电容充电,在0.15 s时使电机处于发电状态,当母线电压升到980 V时开启能量回馈。图5为各个单元a相相电压与相电流波形,可以看出各个单元电压和电流的相位接近于-180°,功率因数达到-0.95以上。从图6的各单元母线电压波形可以看出,在能量回馈时母线电压被稳定在980 V左右,没有再升高。
图7为电网侧相电压与电流波形,可以看出网侧功率因数也保持在-0.95以上。
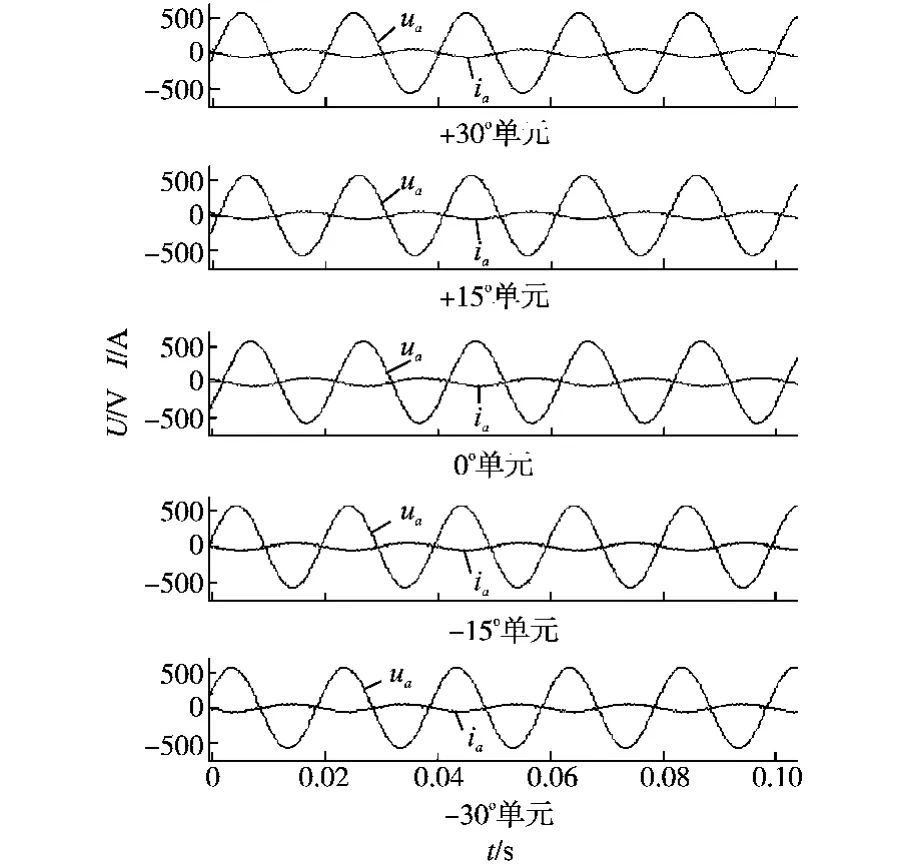
图5 各单元a相电压与电流波形Fig.5 Voltage and current of phase a
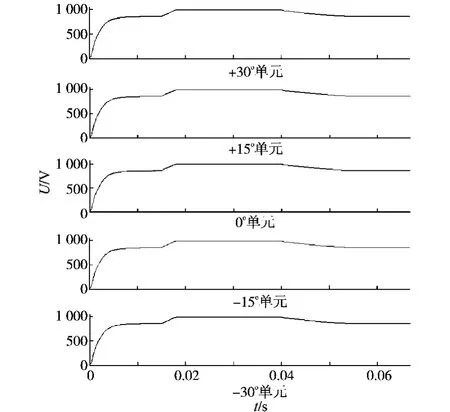
图6 各单元母线电压波形Fig.6 Voltages of DC bus

图7 网侧电压与电流波形Fig.7 Voltage and current of input
6 结论
4象限运行对于单元串联型高压变频器是一个很重要的功能。本文在分析了单元串联高压变频器能量回馈的特点后,提出了一种基于调制波移相的多单元控制方案,并且对于其调制波的生成方法进行了讨论。通过仿真证明,这种方法可以降低成本和提高系统的可靠性。
[1]张崇巍,张兴.PWM整流器及其控制[M].北京:机械工业出版社,2003.
[2]熊健,张凯,裴雪军,等.一种改进的PWM整流器间接电流控制方案[J].电力电子技术,2003,18(1):57-63.
[3]王晓晨.三相PWM整流器间接电流控制动态性能的改进[J].电力电子技术,2007,41(10):110-112.
[4]Wu R S,De wan S B,Slemon G R.Analysis of an AC-to-DC Voltage Source Converter Using PWM with Phase and Amplitude Control.IEEE Trans.On Ind.Applicat.,1991,27(2):355-363.
[5]赵树国,崔明宇.4象限高压变频器在铁矿提升机上的应用[J].变频技术应用,2008,3(1):79-83.
