PLC整体同步控制技术在连续梁桥纠偏中的应用
2010-06-15周松国
周松国
(杭州市市政工程集团有限公司,浙江杭州310006)
1 桥梁结构概况
某城市高架桥梁其中的131#-134#联箱梁为三跨等截面直腹板预应力钢筋混凝土连续箱梁,跨径均为25 m,桥面宽19 m,箱梁高1.5 m。桥面铺装层为8 cm钢筋混凝土层+4 cm沥青混凝土层,两侧设置50 cm宽的钢筋混凝土边防撞墙,桥中心线上设置钢筋混凝土中防撞墙。
131#、132#、133#墩为盖梁 +双立柱结构,134#墩为墩帽+双立柱结构,基础均为承台+钻孔灌注桩结构。支座均采用GPZ(Ⅱ)系列的盆式支座,其中131#墩从左(西侧)到右的支座依次为3SX、2DX、2SX、3SX;132# 墩 从 左 到 右 依 次 为6SX、4DX、4SX、6SX;133# 墩 则 为 6DX、4GD、4DX、6DX;134#墩则为 6SX、6SX(见图 1)。
2 病害情况及原因
桥梁建成并运营一段时间后,在日常养护检查中发现:第134跨箱梁在第134#桥墩发生相对横向滑移,最大滑移值为11.0 cm。具体反应在134#墩桥面与135#墩桥面错开、防撞栏杆发生错位,盆式支座的上钢板向一侧滑移,另一侧则橡胶板外露,伸缩缝挤压破坏等。横向滑移发生的同时导致了箱梁左侧翼缘板纵向受拉,以致出现横向受力裂缝,裂缝宽度较大,对桥梁耐久性构成威胁。
根据检测单位对131#-134#联连续箱梁弯桥的各个桥墩立柱中心坐标测量、上部结构坐标测量、支座位移测量、桥墩立柱垂直度测量,以及其他检测结果分析,该联箱梁在建成后,其桥墩即下部结构并没有发生位移。该联箱梁的横向位移不是因为桥墩的倾斜所致,而是由于该联箱梁刚好位于弯道上,在其箱梁自重、汽车活载横向偏载作用下使箱梁有发生横向位移的趋势,同时由于第134#墩北侧的1#、2#支座采用双向滑动盆式支座,当箱梁发生扭转变形时,无法对其变形进行约束,所以导致了131#-134#联连续箱梁弯桥在第134#墩位置发生了横向滑移和扭转等现象。
3 连续箱梁的纠偏思路和设备
3.1 连续箱梁桥纠偏的思路
该桥131#-134#联箱梁的自重约为3100 t,考虑到其他荷载则总重可达3600 t,如果直接施加一个力使箱梁复位则困难较大,因为很难为这个力找到一个支点,并且还需要克服支座的约束,防止损伤桥梁的下部结构。在这种情况下采取顶升桥梁是一种简单可行的方法。首先,顶升可以将桥梁的上部结构与下部结构暂时分离,解除了支座的约束;其次,将顶升的装置设置成相对活动的钢结构,利用钢板之间的摩擦系数较小(约为0.1)这一原理,则可以大大减小纠偏所使用的横向推力。同时这种顶升只是将桥梁的上部结构与下部结构暂时分离,顶升高度可以控制在20 mm之内,对交通的影响也比较小。然而由于131#-134#是连续箱梁弯桥,各墩顶支座反力不一致,且同一横梁下各支座的反力也有差别,如果采用一般同步控制的千斤顶,则较难达到要求。因此,综上所述,131#-134#连续箱梁纠偏的工作思路为采用PLC液压整体同步顶升纠偏。
3.2 PLC液压同步顶升系统
PLC液压同步控制是一种力和位移综合控制的方法,这种方法建立在力和位移双闭环的控制基础上。由液压千斤顶精确地按照桥梁上部结构的实际荷重,平稳地顶举桥梁,使顶升过程中梁体受到的附加应力下降至最低,同时液压千斤顶根据分布位置分组,与相应的位移传感器组成位置闭环,以便控制桥梁顶升的位移和姿态,同步精度为±2.0 mm,保证了顶升过程的同步性,确保顶升时梁体结构安全。

3.2.1 同步液压技术简介
同步液压技术的设备主要由液压泵、液压缸、传感器等组成。由液压泵通过液压油向液压缸提供固定的压力值。液压泵上的电磁阀有控制升降的功能,而同步的功能主要由液压缸来实现,这是因为液压缸的同步是由一个带有液压桥式整流板的电磁二位二通球阀组来控制的。液压桥控制液压的流向和流量,使之稳定。每组液压缸还有一个液控单向阀,它的作用是在液压管等发生问题时短时间内将液压缸的功能锁定,防止被顶起的物体突然下落,保证负载的有效支撑。
3.2.2 计算机控制系统
计算机控制系统是实现同步的关键。它是采用闭环控制系统理论,将大吨位的物体的位移变化信号△H作为控制参数,同时接收液压缸内的压强变化信号△P,通过传感器转换成电信号传送到计算机控制器内。计算机控制中心对这些信号进行比较和计算,如果发现其中某一控制点有超差的可能时,计算机发出指令信号,调整二位二通电磁截止球阀动作,关闭液压油流,从而限定了该点的液压缸升降;同样如果发现某一控制点已经停止或落后时,计算机发出指令信号调整二位二阀,使各受控油路的千斤顶停止工作,直到错误被消除。在得到系统操作人员重新工作的命令后系统又恢复正常工作。控制系统控制的各点以5 mm偏差为一行程,当各点之间顶升偏差超过该值时,控制系统将自动发出指令,停止顶升。
4 顶升纠偏施工方案与实施
4.1 顶升纠偏施工要求
顶升所用的设备应综合考虑各种不利因素的影响,取用计算抬升重量的1.5倍的安全系数。其次,根据支座的形状系数计算出支座的抗压弹性模量容许值(实际抗压弹性模量值已无法试验测得),计算支座上部承受的恒载外力值与活载外力值,得出支座可能产生的压缩变形值,并适当考虑支座压溃后的变形增大值,作为控制该支座最终的起顶量的控制值。确定千斤顶的起顶位置,并对该位置进行局部承压计算,以保证局部承压面的安全性。
弯梁顶升施工过程中,要求弯梁顺桥向上升过程中不均匀高差应控制在5 mm之内,横向上升过程中不均匀高差应控制在2 mm之内,横向纠偏则以控制与相邻两侧桥梁线型接顺为目的。
过程中的应力控制:顶升施工阶段,考虑汽车荷载、温度、不均匀顶升量等多种因素,控制墩顶处正截面底缘应力变化值不大于3.51 MPa(受拉),控制底缘最大拉应力为1.68 MPa(受拉),小于规范允许值[σ]l混凝土=0.8Rlb=2.4 MPa。
4.2 顶升纠扭方案的施工准备
采用扣件式钢管搭设施工场地工作平台,以便施工操作人员及监控人员使用,工作平台要牢固可靠,保证人员安全;其次,对所使用的千斤顶、油泵做好配套标定工作;再次,对支座处的杂物进行认真清理、解除支座附近的多余约束,并现浇顶升及支撑反力上下反力点的混凝土垫块,要求垫块表面应抹平。
4.3 顶升所用的千斤顶布置
弯桥自重情况下各墩位支座的反力如下表1所列。

表1 各墩位支座反力表(单位:kN)
顶升的所用千斤顶为50 t超薄千斤顶,千斤顶本体高度为150 mm,行程为80 mm。在每个墩位布置32台千斤顶(尽可能靠近原支座布置,符合桥梁受力要求见图2、3所示),即每墩每个支座的东西两侧各布置一组4个千斤顶,则每墩的千斤顶可承受1600 t的外力,满足施工要求。这种小吨位、多顶对称布置的优点主要有:每个支座附近有多个顶升点,可以将大吨位的集中荷载均匀地分散成多个点,减少箱梁局部受力过大的不利影响;多个点对称布置方式较灵活,其合力受力点仍然在原支座位置,可不改变原结构的传力;多个点大大增大了每个点的安全储备,从而可以预防某些千斤顶的失效带来的不利影响。相对而言,工作吨位小的超薄千斤顶自重较轻有利于安放垫块,降低施工难度。

4.4 临时支撑及监控设备布置
采用C30预制混凝土垫块作为临时支撑,以墩柱顶面作为顶升千斤顶的下支撑点,千斤顶的上支撑点及支撑垫块直接设在梁底下抹平的混凝土垫块上,下支撑点设在墩顶现浇的混凝土垫块,顶升千斤顶上下均铺设2 cm的钢板,临时支撑体系采用C30的现浇混凝土垫块和薄厚不等的钢垫块组合成一体。
布置监控所需应力、位移观测测点。起顶位移控制用光栅尺安装在每个墩的梁体上;在桥面伸缩缝处设置若干个观测测点,以观测桥面伸缩缝处的位移变化。
4.5 顶升方案实施
(1)顶升前应将所施工的桥梁,进行临时封闭,并解除顶紧的伸缩缝,以避免施工过程发生意外。
(2)准备工作完成后,在项目负责人的统一指挥下,128台千斤顶同时顶升。将千斤顶打压,顶住梁底,观察光栅尺的变化,记录初读数。控制梁的顶升速度,每顶升10 mm为一个行程,每个顶升程序完毕,由监控人员统一完成读数,对起顶不均匀造成相邻两主梁间的位移变化量超过0.1 mm的进行局部顶压调整,调整完成后进行下一过程的顶升,直到全部顶升到位,支座可顺利取出。整个顶升过程均须对梁体、桥面及附属设施进行认真观察,如有异常立即停止顶升。
(3)顶升到位后,统一在梁底安放预制钢板进行临时支垫,支垫要求牢固可靠,支垫过程不可放松千斤顶。支垫完成取出旧支座后,先认真清除原梁底不锈钢板上的锈迹及污垢,涂上一层润滑油脂,然后用水平量尺检查支座下垫石表面是否平整,对垫石表面的油污及浮浆表面要打磨清除干净。在安放新支座前,还需在原支座位置及新支座表面进行十字定位,以确保支座更换后位置准确。
(4)在安装前将支座中的四氟板表面的储油槽内的硅脂充满,保证四氟板表面和不锈钢表面的洁净,不得有损伤、拉毛现象。
(5)支座更换完毕主梁就位时应分布进行,先将梁底临时支撑解除,然后按顺序下落梁体就位。要交叉放松千斤顶,以防桥面损坏或压坏个别千斤顶。
4.6 纠偏方案设计与实施
4.6.1 限位块布置
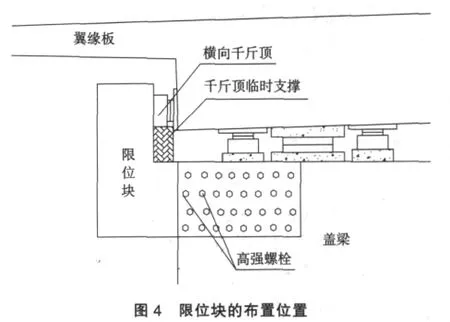
在顶升过程中,为避免箱梁向内侧坡滑移,在131#、132#、133#、134# 墩顶外侧设置横向钢结构挡块(见图4)。在挡块和箱梁之间采用润滑的钢板组合体系,确保不影响竖向顶升施工。在134#墩顶两侧均设置横向挡块,并采用水平向设置的千斤顶系统,进行横桥向纠偏工作,另一侧挡块作为辅助系统,确保顶升位置的准确性和合理性。
在131#、132#、133#墩位内侧,设置辅助千斤顶系统,配合134#墩的纠偏工作,确保整体线型与原设计吻合。
4.6.2 纠偏横向千斤顶布置
1.0 ×弯桥自重和1.0×动活载的组合效应对支座的反力如表2所列。

表2 组合效应条件下,支座反力表(单位:kN)
钢板之间的摩擦系数以μ=0.125计算则131#和134#墩的侧向顶推力为977 kN;132#和133#墩的侧向顶推力为1782.5 kN。因此在每墩的顶推侧各设置2台100 t的超薄千斤顶,即每墩最大能提供200 t的侧向水平推力。在实施过程中得知,其横向最大水平推力实际为171 t。
5 顶升纠偏过程监控
5.1 测点布置
该监控设置位移传感器12台,每个墩设置3台,分别放置在两侧及中支点的墩位处;设置3个应力监控断面,分别位于132#、133#墩的两侧及中间。在顶升过程中对12个位移测点、6个主梁应力测点进行实时监控。
5.2 监控实时工况
监控过程中实际工况程序为:
测试工况一:主梁位移为0 mm时,千斤顶开始加压;
测试工况二:主梁位移为1 mm时,主梁开始上升;
测试工况三:主梁位移为2 mm时,主梁的重量基本由千斤顶承受;
测试工况四:主梁位移为5 mm时,主梁与支座脱开;
测试工况五:主梁位移为7 mm时,临时支撑承受主梁的重量;
测试工况六:主梁位移为10 mm时,临时支撑承受主梁的重量。
5.3 监控结果
根据现场监控结果,整个抬升过程基本实现了同步顶升,顺桥向最终高差控制在3 mm以内;各项应力值没有达到极限应力,即:Δmax=1.785 MPa<3.51 MPa,其控制应力为+0.045 MPa,远小于规范允许值[σ]l混凝土=0.8Rlb=2.4 MPa,满足设计及规范要求。
6 结论与建议
本文采用PLC液压同步控制技术将连续梁桥同步整体顶升,解除原有支座等部件对桥梁的约束作用,并建立以千斤顶为支承的新体系。通过对千斤顶和支撑接触面的处理来降低横向纠偏的摩阻力,然后用安装在侧面的千斤顶进行桥梁纠偏复位。实施过程中顺桥向的最终高差、主梁的各项应力值都在控制范围内。主要建议如下:
(1)在设计与施工过程中要密切注意支座的正确设置和施工。
(2)位于曲线上的连续梁在设计中应采取一些构造措施以减少桥梁病害的发生。
(3)桥梁运营过程中要及时进行养护,对该桥梁进行定期观测,如发现问题及时处理。
(4)采用PLC液压同步控制技术能在限制通行的情况下实施连续箱梁弯桥顶升纠偏,使老桥的修复对社会交通的影响降到最低程度。
(5)采用PLC液压同步控制技术能大幅减少连续梁桥纠偏的施工工期和施工成本,创造一定的经济效益和社会效益。
