一种新的基于神经网络的景象匹配算法
2010-06-14李建军胡礼勇
李建军,李 钊,牛 萌,胡礼勇
(1.第二炮兵士官学校,山东青州262500;2.第二炮兵驻石家庄地区军事代表室,河北石家庄050081)
0 引言
景象匹配是飞行器导航和制导中的关键技术之一,在一飞行器辅助导航、远程武器或精确制导武器的末制导、图像目标的搜索与跟踪等军事领域具有重要的应用价值。目前,人们提出了许多景象匹配区选取准则和景象匹配算法,但这些算法在应用中都遇到了不同程度的难题。尤其是对于实时图存在旋转变化的匹配问题,传统的方法匹配精度降低,甚至会出现误匹配现象[1-3]。为解决存在角度旋转实时图像的匹配问题,并且尽可能地提高匹配实时性能,本文提出一种新的神经网络结构,将实时图像与基准图像内待匹配区域的像素按环形排列,分别作为神经网络的阈值和输入,选择基准图像内与实时图像相对应的各环差值均较小的区域中心作为匹配位置。
1 基于神经网络的景象匹配算法
1.1 BP神经网络
典型的BP神经网络为3层网络(如图1所示),包括输入层、隐含层和输出层,相邻层之间结点通过权值实现全相连。其学习由4个过程组成:输入层经隐含层向输出层的“正向传播输出”过程;网络的希望输出与网络实际输出之差的误差信号由输出层经隐含层向输入层逐层修正连接权的“误差逆传播”过程;正向传播和反向传播反复交替进行的网络“记忆训练”过程;网络趋向收敛的“学习收敛”过程[4]。
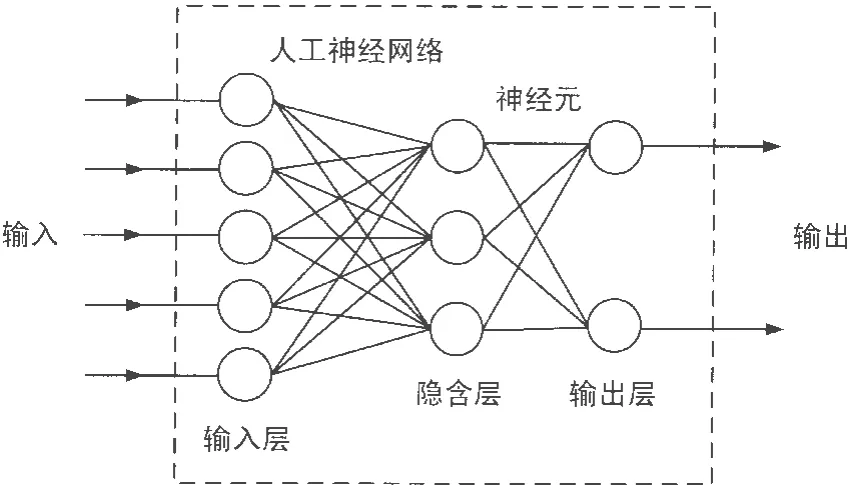
图1 3层BP网络结构
景象匹配算法是实时图在基准图中按一定的准则进行搜索,匹配最好区域的中心即可认为是目标的中心。由于精确制导武器对图像处理的实时性要求很高,因此匹配程度衡量的计算量很小才可满足实时性的要求,利用灰度差的绝对平均值(MAD)衡量2幅图像的匹配程度就是一种计算量较小的算法。
1.2 平均绝对差算法
设实时图Y大小为n×n(n一般为奇数),那么基准图(大小为M×N)中同样大小的基准子图X与Y的平均绝对差算法(MAD)为[5]:

式中,d为最小处即为匹配点。由上式可见,如果实时图仅在平面内发生了旋转或是实时图与基准图的灰度差异较大,d的值也会随之增大,不能搜索到正确的匹配点。针对这一缺点,本节提出一种新的基于像素环形排列的神经网络算法。
为降低灰度差异对匹配的影响,匹配前首先要对基准图和实时图做去均值处理:
①去除实时图大小的基准子图灰度均值,结果图为A=X-¯X,X为实时图大小的基准子图原始灰度数据;X为实时图大小的基准子图的原始灰度均值;
②去除实时图灰度均值,结果图为B=Y-¯Y,Y为实时图的原始灰度数据;¯Y为实时图的原始灰度均值。
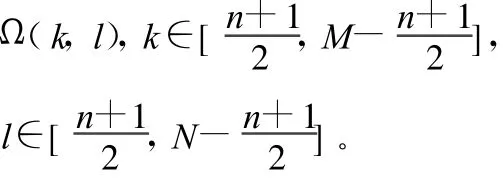
然后根据基准图和实时图的大小确定基准图中参与匹配运算的区域为:
1.3 基于像素环形排列的神经网络匹配算法
神经网络可分为3层:第1层为输入层,该层的神经元即为实时图的所有像素单元;第2层为隐层,根据景象匹配的思想,该层神经元的激励函数可选用式(1)的正态函数或式(2)的三角形函数。隐层第i个神经元的激励函数记为fi(x):
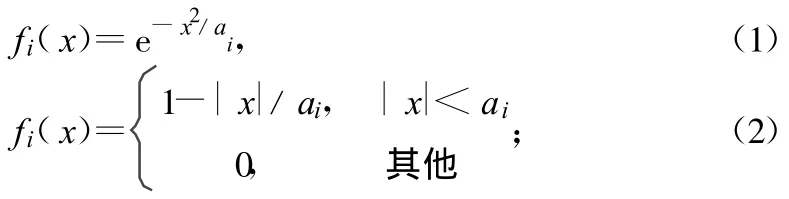
第3层为输出层,该层的主要作用为统计图像匹配的结果,因此该层的激励函数可选正线性函数:
如图2所示,将实时图内的像素看成是以该几何中心点为圆心的环形排列,中心点像素为第1环,向外扩展,第2环包括8个像素,第3环包括16个像素……。隐层的神经元数与实时图的环数相同。第i环的所有像素输入到隐层中的第i个神经元中,经该激励函数作用后,将所有隐层神经元的输出结果输入到输出层的神经元中,所得结果为该中心点的匹配值。选取基准图中匹配值最大的点作为与实时图匹配的匹配位置。图2给出了实时图为3×3时的网络示意图,网络中共有2环,第1环的神经元输入到隐层中的第1个神经元,第2环中的所有神经元输入到隐层中的第2个神经元。
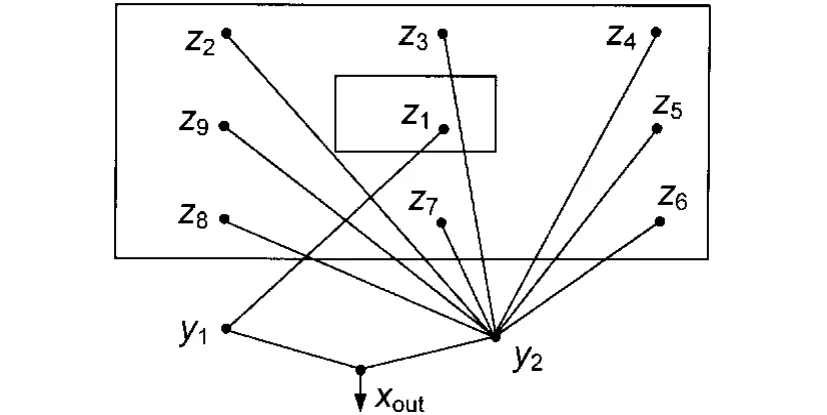
图2 基于像素环形排列的神经网络结构
假设网络中输入层共有m环,则隐层中就有m个神经元,此时神经网络的方程可表示为:
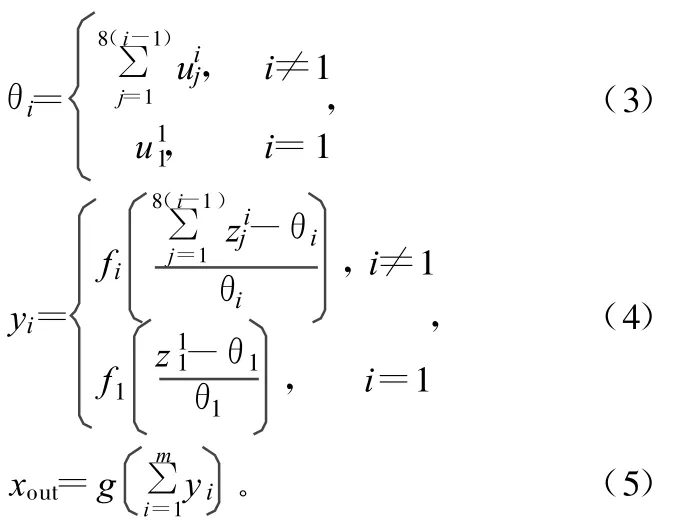
式中,zij为输入层中第i环的第j个神经元的值,即该像素值;uij为实时图中第i环的第j个像素值;θi为隐层第i个神经元的阈值;xout为神经网络的输出,对应基准图中匹配区域与实时图的匹配值;yi为隐层第i个神经元的输出。由于不同的环所具有的像素数不同,考虑到图像受到的污染噪声的分布情况,所以隐层的不同神经元的激励函数fi(x)的参数ai的选取可以不同,i越大,则ai可选较大的值。
由上述分析可以看出,本文提出的神经网络相当于一种权值只为0或1,激励函数选为fi(x)或g(x)的简化了的多输入单输出3层BP神经网络,在各环像素的累加过程中,对噪声起到了一定的平均滤波作用,计算量比MAD算法略小,算法对实时图的平移和旋转运动及与基准图的不严重灰度差异均具有良好的不变性。
2 仿真实验与结果分析
实验用图基准图,大小为256×256;实时图源由基准图顺时针旋转12°加噪声生成的图像,模拟实时图大小为63×63,在实时图源上随机截取。从实时图源中选取6幅63×63大小的模拟实时图,分别用传统Nprod算法、MAD算法和本文算法在基准图中进行全场相关匹配,计算结果如表1所示。

表1 不同匹配算法计算性能比较
从表1可以看出,对于实时图存在较大的角度旋转与噪声的图像匹配,传统Npod算法虽然具有一定的抑制作用,但是匹配结果与实际匹配位置存在一定的误差,算法的匹配效果较差,MAD算法的匹配效果最差,在多处位置出现匹配误差,甚至出现误匹配;本文算法由于实时图匹配之前进行了去灰度均值处理,因而对基准图的不严重灰度差异具有良好的抑制作用;该方法设计的网络输入层具有环形结构,因此该算法对实时图的平移和旋转运动都具有良好的不变性,从而克服了MAD算法仅对实时图像平移具有不变性的缺点,因此,在所有匹配位置上都能实现准确匹配,对于旋转图像匹配具有良好的不变性。在匹配计算所需的时间上,本文算法在基准图各点进行匹配过程中,实时图各环只需要进行一次加法计算,而不需要每次匹配都重新对实时图各环再进行加法计算,效率略优于MAD算法,速度比传统Nprod算法提高5倍以上。
3 结束语
对利用BP神经网络进行景象匹配的理论、方法进行了研究,介绍了BP神经网络基本理论,为解决实时图存在旋转变化的匹配问题,提出一种新的神经网络结构。将实时图与对应基准图相应区域内的像素按环形排列,分别作为神经网络的输入和阈值,选择实时图与对应基准图相应区域的各环差值均较小的位置作为匹配结果。实验表明该方法对于实时图的平移和旋转均具有良好的不变性,同时,算法计算量比MAD算法略小,提高了景象匹配算法的实时性能。
[1]段辉明,卫 东,葛成辉,等.遥感图像与地理坐标匹配的快速算法[J].中国图像图形学报,2004,9(1):87-92.
[2]雷 琳,蒋咏梅,匡纲要.一种基于图像分类的遥感图像配准方法[J].国防科技大学学报,2004,26(2):35-40.
[3]MUSSE O,HEITZ F,ARMSPACH J.Topology Preserving Deformable Image Matching Using Constrained Hierachical Parametric Models[J].IEEE Trans.Image Process,2001,10(6):1081-1093.
[4]袁曾任.人工神经元网络及其应用[M].北京:清华大学出版社,1999.
[5]OLSON C F,HUTTENLOCHER DP.AutomaticTarget Recognition by Matching Oriented Edge Pixels[J].IEEE Transactions on Image Processing,1997,6(1):103-113.