非对称2T1R并联机构的运动学和灵巧性分析
2010-04-05张彦斌张树乾
张彦斌 ,吴 鑫 ,张树乾
(河南科技大学a.规划与建筑工程学院;b.机电工程学院,河南洛阳 471003)
0 前言
典型的并联机构是由一个动平台、一个静平台,以及联接两平台的若干条分支组成。一般情况下,并联机构的分支数等于其自由度数,这使得每条分支中的驱动器数不多于 1个,并且驱动器安装在静平台上或接近于静平台的构件上。相对于传统的串联机构,并联机构具有刚度大、速度高、精度高和承载能力强等优点,已成为近 20年来机构学和机器人领域研究的热点之一[1]。目前,已有多种新型并联机构在多种领域得到了应用,其中最著名的是Stewart机构[2]和Delta机构[3]。虽然并联机构有其突出的优点,但其弱点也较为明显,如结构复杂、运动学耦合性强等。尤其是强耦合性使得机构的工作空间小,轨迹规划、控制设计和标定困难,这也限制了并联机构的推广应用。因此,如何设计解耦的并联机构已成为该领域的一个新的研究方向。文献[4]对一类 3自由度弱耦合并联机构进行了综合和分析。文献[5]提出一种三移动一转动弱耦合并联机构,然后对其作了运动学分析并构造出实体样机模型。文献[6]提出一种二移动一转动无耦合并联机构,并对其进行了各向同性设计。本文提出一种新型非对称二移动一转动空间并联机构,分析了该机构的自由度类型及数目,并对其运动学和灵巧性进行了分析和讨论。
1 自由度分析
图1为所提出的新型 3自由度空间并联机构,该机构由动平台(Moving Platform)、定平台(Fixed Base)以及联接两平台的 3条分支组成。第 1条分支中运动副类型及配置方式为P1‖R2‖R3‖R4⊥R5,第2条分支为P6⊥P7⊥R8,第3条分支为P9⊥P10⊥R11‖R12⊥R13。其中,P、R分别表示移动副和转动副;“//”、“⊥”则分别表示相邻运动副轴线相互平行或垂直。另外,第2条分支中转动副 R8和移动副 P6轴线相互平行,3条分支中移动副 P9和动副 R11轴线相互平行。
为了实现机构动平台的预期运动输出特性,还要满足如下结构条件:

图1 新型二移动—转动空间并联机构
(1)安装在动平台上的第 1条分支中的转动副R5和第 2条分支中转动副 R8轴线重合,并与第 3条分支中转动副 R13轴线平行。
(2)位于定平台上的 3个移动副 P1、P6和 P9为主动副,其轴线相互垂直,且 P1和 P6轴线共面。
为了问题分析方便,如图1所示,建立静坐标系O-xyz附着于定平台上,x轴平行于 P1轴线,y轴平行于P6轴线,z轴可通过右手准则确定,并可知其平行于P9轴线。动坐标系P-uvw位于动平台上,v轴与 R8轴线重合,u轴位于动平台上且垂直于 v轴,w轴同样可通过右手准则确定。
对于并联机构,其动平台运动输出特性可利用如下表达式给出[8]:

其中,MP为并联机构动平台的运动输出特征矩阵;Mli为第i个分支的运动输出特征矩阵。
根据图1所示机构的结构情况可知,其动平台的运动输出特性为:

根据式(2)可知:该并联机构动平台相对于静平台的自由度为3,分别为沿x轴、y轴移动和绕y轴转动,即该机构为二移动一转动空间并联机构。
而由并联机构自由度的计算方程[7],得:

其中,fi为第i个运动副的自由度;m为运动副数;ξj为第j个基本回路的独立位移方程数;v为机构的基本回路数;min{}为取∑ξj为最小值的v个基本回路;F则为机构的自由度数。
对于所给并联机构,共有13个单自由度运动副,所以 ∑fi=11;两个基本回路,即v=2,且 ξ1、ξ2均等于5。因此,该机构的自由度数为F=13-(5+5)=3,与上述机构动平台运动输出特性分析结果一致。
2 位置分析
图1所示的机构中,q1、q2和q3分别表示3个主动副P1、P6和 P9沿其各自轨道的主动输入位移;φ为动平台绕y轴的姿态转角,规定沿y轴负向为正;a为动坐标系原点P到静平台平面的垂直距离;b为P点到运动副 R8的距离;l为形状为平行四边形的动平台的其中一条边长。
2.1 位置正解
位置正解即为已知机构驱动器的主动输入求解动平台的输出(包括位置和姿态),即已知 3个输入参数q1、q2和 q3,求解动平台上P点的位置坐标x、y和动平台的姿态角φ。
对于P点的z坐标,根据图1可知其为常数,且有z=a。
对于动平台的姿态角 φ虽然无法直接写出其求解方程,但可利用间接方式求出。假定转动副 R13轴线上取一点H,那么该点的z坐标zH可通过两种途径表示:


根据式(9)可知:姿态角φ有两解,且这两个角度之和等于±180°。而由式(6)和式(7)可知:点P的位置坐标 x、y都只有唯一解,因此该机构的正解共有两组。
2.2 位置逆解
位置逆解即已知动平台上某一点的位置或姿态,求解机构驱动器的主动输入参数。对图1所示机构,即已知点 P的位置坐标x、y和动平台的姿态角φ求解3个主动副的输入参数q1、q2和q3。
根据式(4)、式(5)和式(8)则可分别求得:

3 速度分析
将式(4)、式(5)和式(8)对时间进行一阶求导,然后整理矩阵形式,得:

式中,v=[vx,vy,ωy]T为动平台的输出速度矢量;q=[q,q,q]T123为机构驱动器的输入速度矢量;而 J为速度雅可比矩阵,且有:

由于机构的雅可比矩阵为对角阵,故其动平台的输出速度与主动关节的输入速度之间呈一一对应关系,所以该机构为完全解耦并联机构。此类机构在控制、轨迹规划和标定等方面非常简单,这解决一般并联机构因耦合性强而产生的问题。
4 灵巧性分析
机构灵巧性又称为可操作性,是指在当前位姿状态下机构沿指定方向运动的能力。文献[8]提出采用机构雅可比矩阵的条件数作为机器人灵巧型的度量指标。条件数是由雅可比矩阵的最大奇异值σmax与最小奇异值 σmin的比值决定的,即

显然,kJ的取值范围为 1到无穷大。kJ越小机构灵敏度越高,当 kJ=1时矩阵有相同的奇异值,这种情况下机构所处位形称为各向同性位形,而当 kJ趋于无穷大时,则称机构处于奇异位形。特殊情况下,如果在任何位形时 kJ均等于 1,则称该机构为完全各向同性机构。
由于式(15)所确定的条件数范围太大,尤其是当机构处于或接近奇异位形时条件数的值几乎无法确定,因此实际应用中常采用另外一种性能指标-运动学条件指标(ηJ)来评价机构的灵巧性,并将其定义为:

由式(16)可知:ηJ的取值范围在 0到1之间。当 ηJ=0时机构处于奇异位形,而当ηJ=1时机构处于各向同性位形。
根据前面速度分析可知:由于机构雅可比矩阵为对角阵,所以对角线上的元素即为该矩阵的 3个对应奇异值。但是,由于矩阵中前两列元素是无量纲单位,而第 3列元素的单位是长度单位的倒数,因此无法直接对这 3个奇异值进行比较。为解决这一矛盾,必须引入 1个特征长度来划分具有长度单位的雅可比矩阵的元素,以产生 1个新的无量纲雅可比矩阵[9]。例如,令动平台的边长 l等于单位长度 1即可解决 3个奇异值单位不统一的问题。对于一般的机构雅可比矩阵来说,确定雅可比矩阵奇异值的过程非常繁琐,因而条件数也常用下述方法确定,即


根据上述分析过程可导出本文所提出并联机构的运动学条件作用指标,即

图2给出了当动平台姿态角 φ的取值范围在[-70°, 70°]时机构的运动学条件指标曲线,可以看出其最小值大约为 0.63。而最重要的是,当姿态角 φ=0时,即机构动平台处于水平面位置时,运动学条件指标 ηJ=1,也就是说机构处于各向同性位形,此时机构沿各个方向上具有相同的运动和力学性能。
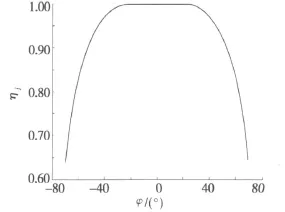
图2 运动学条件指标曲线
5 结论
本文对一种新型非对称 3自由度并联机构的运动学和灵巧性进行了研究,利用单开链单元法分析了该机构动平台运动输出特性并计算出其自由度数目。根据运动学分析可知,该机构的雅可比矩阵为 3×3阶对角阵,即机构动平台的输出运动和主动关节的输入运动之间存在一一对应的映射关系,这解决一般并联机构运动耦合性强的弱点,使得机构在轨迹规划、控制设计和标定等方面具有明显的优势。而由灵巧性分析可知,机构在某一特定位形时出于各向同性位形。本文所做工作为该机构的进一步研究和开发奠定了理论基础。该机构在工业机器人、医用机器人和微操作机器人等领域具有潜在的应用前景。
[1] Joshi S A,Tsai L W.Jacobian Analysis of Limited-DOF Parallel Manipulators[J].Trans ASME Journal of Mechanical Design,2002,124(6):254-258.
[2] Stewart D.A Platform with Six Degrees of Freedom[J].Proceedings of the Institution of Mechanical Enginners,1965,180 (15):371-386.
[3] Clavel R.Delta,a Fast Robot with Parallel Geometry[C]//Proceedings of 18th International Symposium on Industrial Robots.Lausanne,France,1988:91-100.
[4] Jin Q,Yang T L.Synthesis and Analysis of a Group of 3-Degree-of-Freedom Partially Decoupled ParallelManipu lators[J].Trans ASME Journal of Mechanical Design,2004(126):301-306.
[5] Richard P L,Gosselin C M,Kong X.Kinematic Analysis and Prototyping of a Partially Decoupled 4-DOF 3T1R Parallel Manipu lator[J].Trans ASME Journal ofMechanical Design,2007,129(6):611-616.
[6] Zhang Y,Liu H,Wu X.Kinematic Analysis ofa Novel Parallel Manipulator[J].Mechanism and Machine Theory,2009,44 (9):1648-1657.
[7] 杨廷力.机器人机构拓扑结构学[M].北京:机械工业出版社,2004.
[8] Salisbury JK,Craig J.Articulated Hands:Kinematic and Force Control Issues[J].International J of Robotics Research, 1982,1(1):4-12.
[9] Angeles J.机器人机械系统原理:理论、方法和计算[M].宋伟刚,译.北京:机械工业出版社,2004
