面向PLC的离散事件控制系统设计方法研究
2010-03-26韩江洪王跃飞魏振春
毕 翔, 韩江洪, 王跃飞, 魏振春
(1.合肥工业大学计算机与信息学院,安徽合肥 230009;2.合肥工业大学安全关键工业测控技术教育部工程研究中心,安徽合肥230009)
近半个世纪以来,可编程逻辑控制器(PLC)以其稳定性和易使用性等方面所表现出的卓越性能,逐渐成为现代工厂执行自动化任务的中流砥柱。然而,日益扩大的市场需求和激烈的市场竞争,使得服务生产的控制系统不可避免地演变成具有同步、并发和竞争机制的离散事件控制系统(DECS)。针对该类复杂系统,传统的PLC设计方法存在明显不足,包括控制模型难以快速和正确地建立,设计方案难以分析和验证,控制程序难以修改和重用等[1]。
Petri网作为一种数学和图形化工具,能够在控制系统状态数增多的情况下,建立起比其它工具简练的系统模型,并且能对模型进行正确性验证和性能评价,因此逐步被引入PLC控制系统设计之中。最初,Petri网模型和PLC程序之间是完全独立的,这种设计方法有利于系统模型的建立和验证,但不能满足实际应用的易维护性要求。目前该方向的研究重点在于建立Petri网模型和PLC程序之间的有效联系,实现两者之间的相互转换。文献[2-4]表明,在实现Petri网模型向PLC程序转换过程中,更多侧重于结果,即能够获取PLC程序,而对转换过程的规范化和自动化考虑较少。
本文在构建Petri网对DECS规范化建模准则和方法的基础上,通过定义元素逻辑关系表,实现Petri网模型的结构化表示,并结合梯形逻辑图(LLD)的语法规则,给出从元素逻辑关系表到LLD的映射方法,最终实现Petri网模型向PLC程序的无缝转换。本文选取1个典型的DECS实例对研究内容进行验证,结果表明,这种基于元素逻辑关系表的转换方法,能够实现DECS开发过程的完全计算机化,有助于缩短系统开发周期和提高系统的可维护性。
1 DECS的Petri网模型
1.1 Petri网简介
Petri网理论经过40多年的发展和完善,广泛地应用于自动控制、计算机和通信等众多领域,成为在逻辑层次上对离散事件控制系统进行建模和分析的主要方法之一[5]。随着时间和数据类型等概念的引入,基本Petri网又衍生为时间、随机和有色等Petri网。它们满足了对更多类型系统的建模需求,从而扩展了Petri网的应用范围。然而,在实际建模时,系统对象及彼此间的关系如何用Petri网定义的元素表示,设计者从自身理解的角度出发,会采用不同的对应依据。这使得同一系统,其建模结果有时不是唯一的,且模型的正确性很大程度上取决于个人经验[6-8]。这种建模方式,对于面向系统性能分析的应用场合是适用的,但却不利于DECS开发过程的全计算机化,因此有必要结合DECS的特点,构建一套基于Petri网理论且面向系统实现的建模准则和方法,从而实现DECS的规范化建模。
1.2 DECS的规范化模型
DECS作为一类受离散事件驱动状态演化的控制系统,主要通过演化过程的状态序列和事件序列来反映系统的逻辑行为,并借助控制器予以实现。这使得DECS的Petri网模型应立足于控制器的角度来建立,即采用面向系统实现的建模方法。从控制器的运行机理看,系统的状态值通过传感器等检测对象传递给控制器,外部作用于系统的输入事件通过开关等操作对象传递给控制器,而系统作用于外部的输出事件则通过继电器等执行对象从控制器送出,这3类对象均为对应实际功能器件的物理对象。
此外,为满足控制器内部逻辑处理的需要,系统中还存在着一类与外界无直接联系的虚拟对象,该类对象既可对应逻辑输出(结果),也可对应逻辑输入(条件)。
上述4类DECS对象,在绘制Petri网结构图时,将以库所和变迁2种元素的形式呈现。为了获得规范化的Petri网模型,需构建相应的准则,用以确定DECS对象类型与Petri网元素的对应关系,并对与控制特点和要求相关的建模方法予以明确说明。从对象相对于控制器的输入/输出角色以及Petri网基本原理出发,本文定义DECS规范化建模准则为:
(1)检测类对象OT和操作类对象OM表征输入条件,应与变迁元素对应。可一一对应,也可经逻辑关系运算后与变迁元素对应。当条件满足时,使能的变迁允许发射。
(2)执行类对象OE表征输出动作,应与库所元素对应。当库所含有令牌时,对象执行动作。
(3)虚拟类对象OV表征逻辑的综合,应与库所元素对应。
除定义建模准则外,区别于面向分析和验证的系统,面向综合的DECS在建立Petri网模型特别是规范化模型时,还需要定义一些专门的建模方法,具体包括:
(1)设置一种特殊变迁元素,其对应的逻辑条件始终成立,称为常逻辑变迁(true logic transition),以符号TT表示。
(2)若执行类对象OE或虚拟类对象OV的输出,需要作为返回条件参与逻辑处理,则对应库所元素存在输出变迁,且将该变迁视为库所的替身,称为影子变迁(shadow transition),以符号TS表示;否则无输出变迁,并称该库所为汇聚库所(sink p lace),以符号PS1表示。
(3)为保证模型计算机处理的一致性,若某个变迁元素不存在输入库所,则默认通过使能弧连接一个包含令牌的虚拟库所,并称该库所为源库所(source p lace),以符号PS2表示。
(4)控制逻辑中表示资源能力的定时与计数功能视作虚拟类对象OV,在满足条件的前提下,按计量单位向其对应的库所元素中添加1个令牌,并将该库所的输出弧权函数W VO设置为代表资源能力大小的数值,即WVO=VT或VC。
(5)对于激励信号为保持电平型或瞬间脉冲型的执行类对象OE,若其对应库所元素p e没有满足要求的输出变迁存在,则需作相应的处理,如图1虚线部分所示。其中,pK2指向tK3的连接弧为抑制弧,t t为常逻辑变迁。
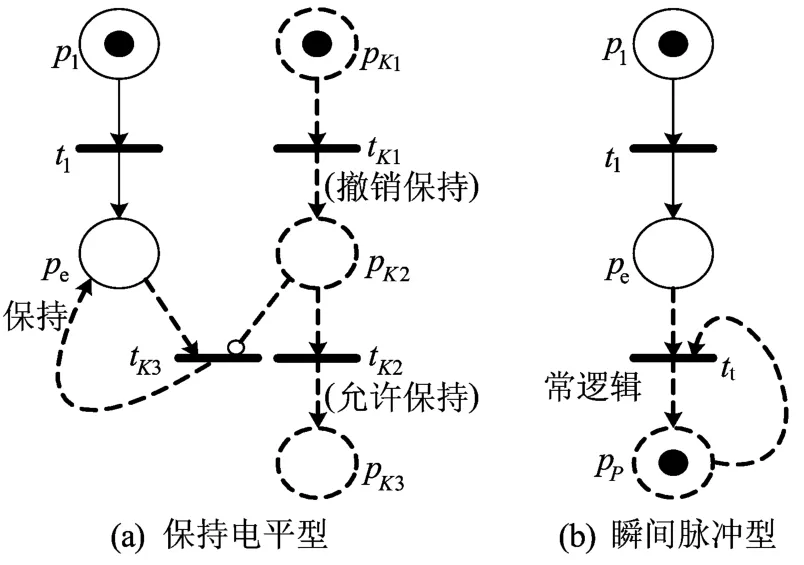
图1 2种激励信号执行类对象的处理方法
2 基于元素逻辑关系表的转换方法
2.1 元素逻辑关系表
规范化的Petri网模型,主要借助图形符号元素,以图形化方式展现系统的组织结构及对象间的联系。这种形象直观的描述方式易于模型设计者阅读和理解,但要实现计算机对模型自动分析并转换为控制程序的功能,则需要结合规范化模型的特点,定义一种易于计算机处理和存储的结构化描述方式,并保证2种方式描述的系统模型在本质上完全等价,仅表现形式有所不同。
考虑到规范化的Petri网模型是由库所和变迁2种主要元素构成的有向图,且存在一系列结构性和规律性特点,包括:一个库所元素若存在输入或输出结点,则该结点必是变迁元素;一个变迁元素必存在输入和输出结点,且该结点必是库所元素;连接2类元素的有向弧在表明系统逻辑演进方向的同时,也指示了元素之间逻辑的先后关系等。因此,本文采用一种易于逻辑检索的双向链接结构来等价描述图形方式的Petri网模型,该结构在实现时以表格方式直观地说明模型的元素构成及元素间的逻辑关系,故称为元素逻辑关系表。
为了避免冗余逻辑关系的出现以及便于模型自动地向控制程序转换,元素逻辑关系表采用主从方式设计,主表仅围绕Petri网模型的库所元素,分别记录该元素对应的所有输入变迁元素(前驱元素)和输出变迁元素(后继元素)。此外,主表还应包含对应的DECS对象属性,例如对象类型及控制参数等。从表用于说明每个变迁元素的发射条件,即对应DECS对象的逻辑关系。
基于所设计的表格结构,DECS模型的元素逻辑关系表可按以下步骤形成:
(1)对图形模型中的所有库所元素和变迁元素,按编号顺序分别建立库所集合P和变迁集合T。
(2)从库所集合P中选取1个目标库所pi,分析并记录其所有输入变迁和输出变迁以及对应的DECS对象属性。
(3)重复步骤(2)直至最后一个库所元素,最终形成主表。
(4)从变迁集合T中依序选取1个目标变迁ti,分析并记录其对应DECS对象的逻辑关系。
(5)重复步骤(4)直至最后一个变迁元素,最终形成从表。
2.2 面向LLD的转换方法
在完成系统模型建立及性能验证后,DECS开发的下一步关键工作是设计用于控制器执行的控制程序。鉴于PLC是目前离散型工业控制领域系统控制器的主力军,且主要以与继电器电路类似的LLD编程语言来设计和实现控制程序,因此本文主要讨论从DECS规范化Petri网模型到LLD程序的转换方法。
分析可知,Petri网模型以库所和变迁2种主要元素通过有向弧连接构成,而LLD程序的基本单位是代表一个完整逻辑含义的指令组——梯级(rung),这意味着从模型到程序的转换方法应从逻辑关系完整性和独立性角度出发,对Petri网模型结构进行合理分割,并建立分割后所得逻辑子块与梯级之间的有效联系,最终通过分块映射的方式逐步获取PLC的LLD程序。
设某个逻辑子块的结构如图2所示。
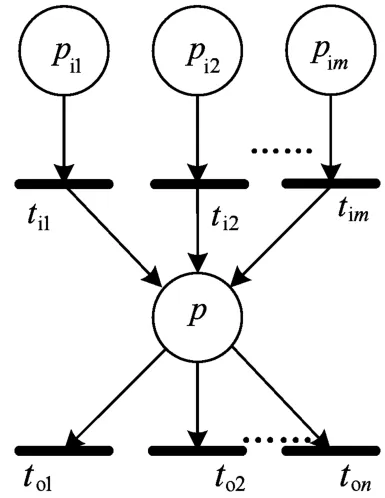
图2 逻辑子块的结构
根据Petri网理论对库所获取和失去令牌的条件规定,该逻辑子块中的库所元素p获取令牌的条件为:

相应地,库所元素p失去令牌的条件为:

综合(1)式和(2)式可知,该逻辑子块对应的逻辑方程为:
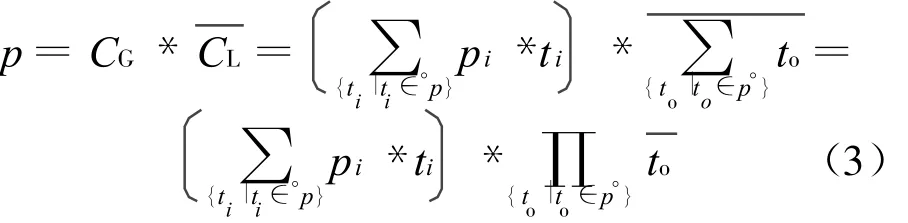
(7)以转换结果中的每个变迁元素为索引,依次检索元素逻辑关系表从表,用获取的DECS对象逻辑组合替代该元素。
(8)依据逻辑关系(与、或、非)及库所元素pi对应DECS对象的属性,以相应LLD指令替代转换结果中的元素,并结合PLC地址分配表,将指令对应到I/O地址及内部寄存器地址,由此完成一个梯级的生成。
(9)对元素逻辑关系表主表中剩余库所元素,依次执行步骤(2)~(8),并用垂直直线连接所有梯级的起始点,最终完成全部LLD程序的生成。
3 应用示例
其中,*表示逻辑与关系;+表示逻辑或关系。
若将(3)式等号右边部分映射为LLD梯级的输入逻辑指令(AND或OR等指令),将左边部分映射为梯级的输出逻辑指令(OUT等指令),并将各库所和变迁元素用代表DECS对象的PLC地址替换,可初步实现Petri网模型逻辑子块到LLD程序的转换。由于常逻辑变迁、影子变迁和源库所等特殊结构的存在,因此还需作进一步处理。鉴于逻辑子块的内容和结构关系,均能在结构化的元素逻辑关系表中予以体现,为实现从Petri网模型到LLD程序的自动转换,本文以元素逻辑关系表为基础,设计了如下的转换算法,即:
(1)从元素逻辑关系表主表的首位置取出目标库所元素pi。
(2)以pi为索引,检索主表获取其输入变迁元素,并以该元素为索引,获取其输入库所元素(即以该元素作为输出变迁的库所),将所有检索结果元素以水平直线连接。
(3)若pi的输入变迁个数大于1,则依次对每个变迁元素重复执行步骤(2),全部完成后以垂直直线分别连接各水平直线的起始点和终止点。
(4)以pi为索引,检索主表获取其输出变迁元素,并将所有检索结果元素以水平直线连接。
(5)以水平直线连接步骤(3)的公共终止点、步骤(4)的终止点和pi。
(6)若转换结果中存在源库所ps2、常逻辑变迁t t或影子变迁t s,则以水平直线替代该元素。
为了验证上述转换方法的可行性,本文以矿山和港口常用的皮带运输控制系统为例,选取OMRON公司的CP1H系列PLC作为系统控制器,说明规范化Petri网模型到LLD程序的转换过程。
皮带运输控制系统启动时,按物料运输方向,依次逐台启动所有皮带运输机,要求前台设备启动后间隔1个走带时间(等于皮带长度除以皮带走速),然后启动下一台设备;系统运行过程中,通过传感器对皮带跑偏、纵撕、断带、堆料、电机温度高等异常状况进行检测。一旦出现故障,则从故障点设备开始,首先对故障设备停机,同时立即停止所有前端设备,然后依次间隔1个走带时间,逐台停止所有后端设备;系统在正常状况下停机时,从首设备开始依次间隔1个走带时间,逐台停止所有设备。
受篇幅限制,此处仅选取单台皮带运输机在不同条件下的停机控制逻辑,用以说明规范化Petri网模型及其向LLD程序的转换过程。该部分的Petri网模型如图3所示。
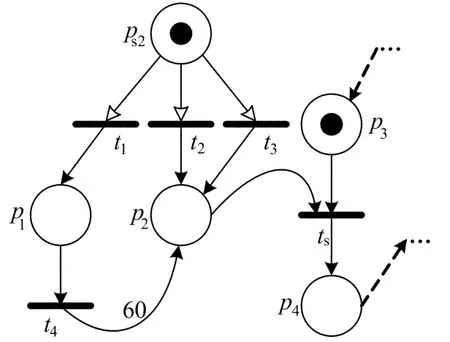
图3 单台皮带运输机的停机控制模型
图3中,t1表示前台设备停止状态信息,用于检测皮带跑偏、纵撕、断带、堆料、电机温度过高等故障的传感器,作为检测类对象其状态经“或”逻辑后与t2对应;t3表示后台设备停止状态消息;p1对应虚拟类对象定时器,定时时间为60 s;p3对应执行类对象电磁接触器,用于控制电机运行。
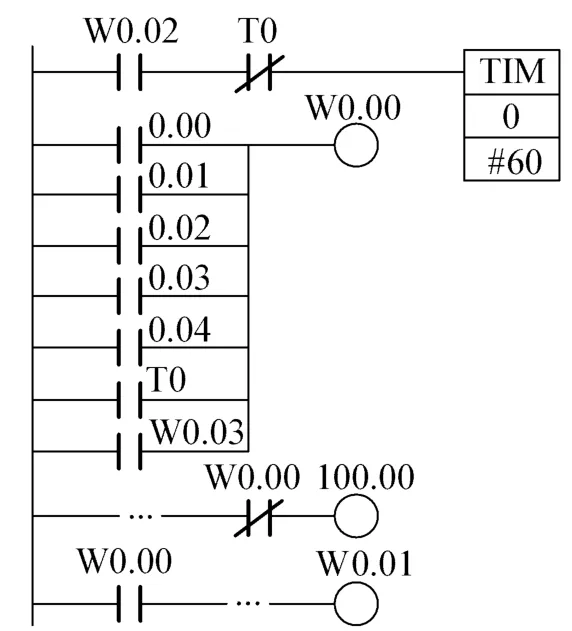
综合考虑对应的DECS对象类型和硬件连线,可将p1的PLC地址定义为定时器T0;p2为内部辅助继电器W 0.00;p3对应的电磁接触器为输出继电器100.00;p4为内部辅助继电器W 0.01;t1为内部辅助继电器W 0.02;t2对应的跑偏、纵撕、断带、堆料和电机温度过高检测传感器分别为输入继电器0.00、0.01、0.02、0.03和0.04;t3为内部辅助继电器W 0.03。在此基础上,按照2.2节描述的算法,可自动生成实现停机控制逻辑的LLD程序,如图4所示。
4 结束语
面对以PLC方式实现的较大规模且控制复杂的DECS,现有程序设计方法在系统建模、性能验证和系统升级与维护等方面已逐步显现不足。现代制造业的快速发展,客观上要求新的设计思想和方法的出现。本文在分析Petri网和DECS特点及内在联系基础上,提出了规范化的Petri网建模准则和方法,用以建立具有唯一性的系统模型。通过研究系统模型结构与LLD编程语言的对应关系,设计了以元素逻辑关系表为基础的转换算法,用以将Petri网模型自动转换为PLC程序。本文的研究有助于实现DECS各开发阶段的无缝连接,从而为构建面向全生命周期的一体化DECS开发平台提供坚实的技术基础,最终达到DECS开发与维护完全计算机化的目标。
[1] Bani Younis M,Frey G.Visualization of PLC programs using XM L[C]//Proceeding of the 2004 American Con trol Conference,2004:3082-3085.
[2] Suesut T,Inban P,Nilas P,et al.Interp retation Petri net model to IEC 1131-3:LD for programmable logic controller[C]//Proceedings of the 2004 IEEE Conference on Robotics,Automation and M echatronics,2004:1107-1111.
[3] 琚长江,杨根科.Petri网在模块化制造系统PLC程序设计中的应用[J].低压电器,2006,(4):20-23.
[4] 刘斌友,李 赟.Petri网在PLC控制系统程序设计中的应用[J].兵工自动化,2008,27(10):70-72.
[5] 郑大钟,赵大千.离散事件动态系统[M].北京:清华大学出版社,2001:230-233.
[6] 高 峰,孙培良.PLC控制系统的Petri网模型研究[J].武汉工业学院学报,2003,22(4):4-6.
[7] Jimenez I,Lopez E,Ramirez A.Syn thesis of ladder diag ram s from Petri nets controller m odels[C]//Proceedings of the 2001 IEEE International Symposium on Intelligen tControl,2001:225-230.
[8] Frey G.Au tomatic im plementation of Petri net based control algo rithm s on PLC[C]//Proceeding of the American ControlCon feren ce,2000:2819-2823.
