平面叶栅栅后4轴伺服位移控制系统开发与应用
2010-03-15王东梅繁吴法勇刘晓鹏
王东,梅繁,吴法勇,刘晓鹏
(沈阳发动机设计研究所,沈阳110015)
1 引言
栅后测量位移机构是平面叶栅风洞试验器重要的测量支持装置之一。随着叶栅试验技术的发展,详细全面测量栅后流场特性已成为平面叶栅试验的重要组成部分。因此,1套适合于栅后测量、定位精度高、角位移随动良好的4轴伺服控制系统成为决定平面叶栅试验测试质量优劣的重要设备。
本文介绍了4轴伺服位移控制系统的开发和应用过程,并给出了后续改进建议。
2 系统组成
4轴伺服位移控制系统采用PLC可编程控制技术,并利用组态王和VB软件做为2次开发平台,与上位机进行通讯,完成实时控制与通讯,形成自身的闭环控制,从而确保被控探针精确到位。该系统是由机械传动、伺服控制、测试及通讯4部分组成的全闭环位移控制系统,系统控制原理如图1所示。下面着重介绍机械传动和伺服控制2部分。
2.1 机械传动部分

机械传动部分由3个单滑块滚珠丝杠传动定位单元和1维旋转平台组成(如图2、3所示),其直线定位最小检测单位为±0.005 mm,角位移最小分辨率为0.036°。在4个坐标轴中,X轴为叶栅额线方向,Y轴为栅后位置调整方向,Z轴为叶高方向,M轴为角向。

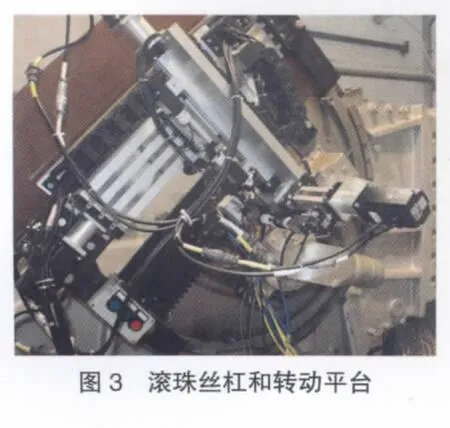
使用该机构可实现下列方式的栅后逐点跟踪测量:(1)角向旋转平台绕X轴联动;(2)角向旋转平台绕X轴、Y轴直线插补;(3)角向旋转平台绕X、Y轴直线插补和Z轴联动;(4)角向旋转平台绕X轴、Y轴非同步逼近的圆弧插补。
2.2 伺服控制部分
伺服控制部分主要由PLC可编程控制器、4个伺服驱动器及外围电器元件组成,如图4所示。
3 系统特性
该控制系统的X、Y、Z轴的位移指令和被控量均为直线位移;M轴的位移指令为角位移,被控量为探针测得的方向压差。由于方向压差信号随流场条件改变而变化,因此设计系统时赋予了该信号较高的灵敏性和准确性。

图5给出了角向位置随动原理方案,其中PLC模块起到处理器的作用。角向位置随动工作原理是:探针2个方向孔测到的压差,通过差压变送器转换成电流信号,送入PLC采集模块并转换成数字量,然后经过偏差计数器,与PLC初始采集静态探针方向压差信号比较,经过角度修正后,转化成伺服驱动器识别的控制移动指令再驱动伺服电机,从而拖动探针随实际气流方向转动。探针转动的角度从伺服驱动器中读出,并经PLC将绝对码转换成标准的0~20 mA电流信号,送入VXI数采系统,其最小分辨率可达到5μA。

当偏差计数器为零时,探针楔面压差为零,表明探针方向与气流方向一致,系统处于静止状态;当偏差信号大于±10个码值(满量程的1/400)时,控制移动指令让伺服驱动系统带动探针朝压差信号减小的方向运动,因此控制探针始终跟踪气流的方向,偏差小于±0.3°。
从实际应用情况看,该系统的直线定位精度达到0.01 mm,直线插补定位精度达到0.015 mm,角位移随动系统精度达到0.3°。图6举例给出了某试验中实测的角位移随动控制曲线。从图中看出,该控制系统具有良好的稳定性和重复性,其主要指标可以满足试验要求。

4 控制指令与后置处理算法
从4轴位移控制系统组成和分析来看,对不同试验件要执行不同测试功能。因此,后置处理算法的主要任务就是控制探针与试验件的相对位置,随动控制精度,然后经过几何变换、数值计算与求解,最终通过控制代码的转换与插值来实现对位移机构的控制。
4.1 角向算法与旋转指令
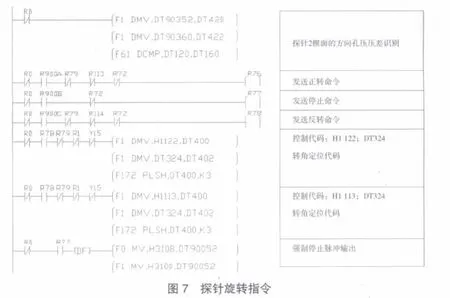
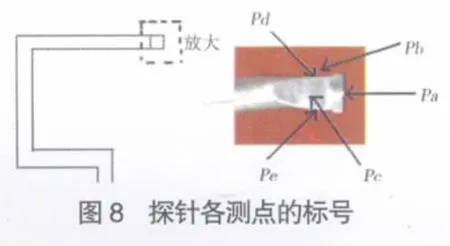
角向随动系统控制是将被控探针感受的压力变化通过传感器转换成标准电流信号,然后与PLC采集的实时校准数据比较,经过运算发出控制指令(如图7所示),驱动可逆电机转动;为控制探针转角的大小,利用测得的总压、2楔面的方向孔压力,经PLC计算取得Ka修正系数,用于控制伺服驱动器的转角指令脉冲,并以该脉冲控制伺服电机带动探针按转角指令转动,从而使探针在跟踪气流方向上达到自动平衡。探针各测点的标号如图8所示。
Ka系数的计算为

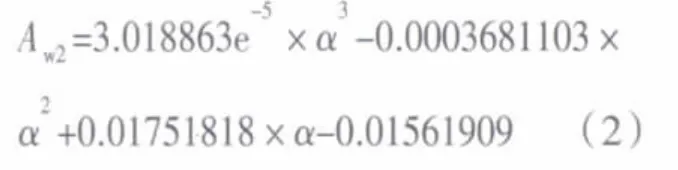
由于栅后实测来流马赫数并不等于标定时的马赫数,所以角度计算时,先用实测值按式(2)计算出Aw2,然后与如图9所示的角度标定曲线比较,若二者差值小于0.5%,则认为探针已对准气流方向,
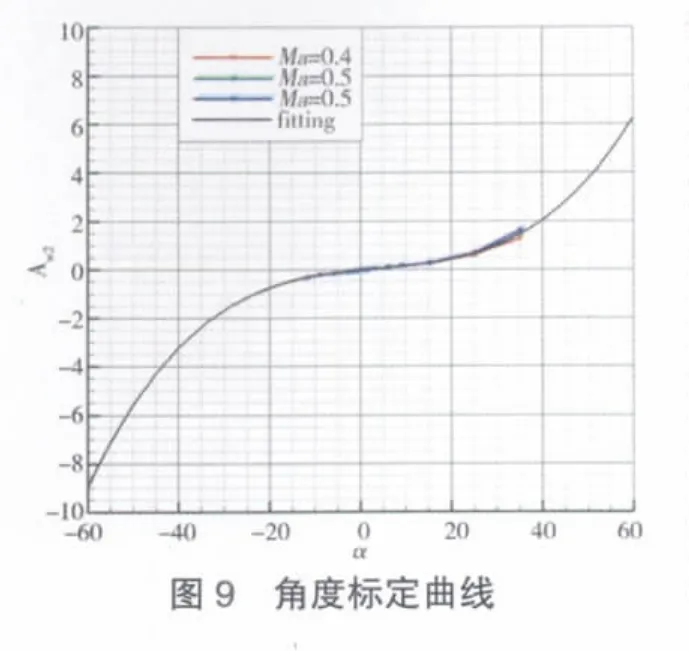
否则将继续转动探针。
4.2 带角向旋转的X、Y轴直线同步插补指令与算法
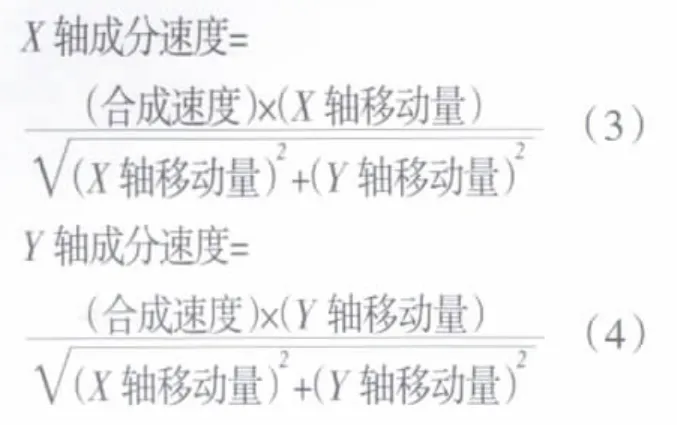
目标轴(X,Y)的位移量是由上位机给定,2轴插补的速度按式(3)、(4)计算,相关指令如图10所示。
4.3 带角向旋转的X轴、Y轴直线同步插补指令与Z轴联动控制算法
为实现全流场的测试,采用双轴直线同步插补与Z轴联动对流场进行逐行测量及角度自动跟踪方式。该方式对研究平面叶栅二次流的机理有很大意义。
4.4 空间任意曲线多轴联动的控制指令
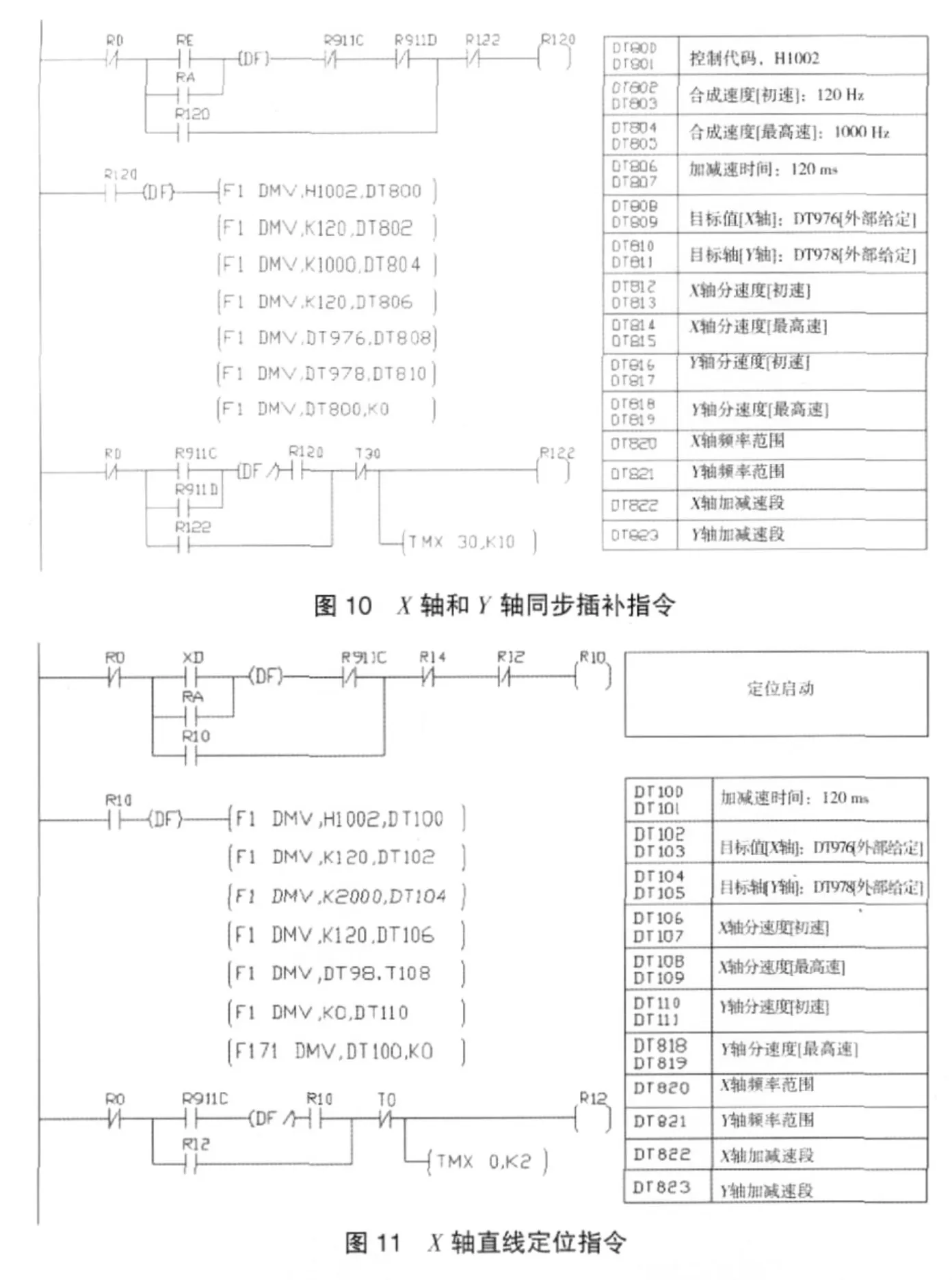
该系统可通过单独发送3个轴的定位脉冲,来执行空间任意曲线多轴联动命令。图11举例给出了X轴直线定位指令。
5 结束语
(1)该系统的位移机构设计新颖,布局合理,控制精度高,使用寿命长。
(2)该系统的直线定位精度为0.028 mm,M轴角向位移定位精度为0.036°,角向随动控制精度为0.3°,完全可以满足常规试验需要。
(3)该系统实现了对栅后流场的全方位测量,使用灵活、方便、可靠,不仅可加快试验进程,而且可保护探针的使用安全,具有很强的推广使用价值。
目前,使用该系统测得的角度未考虑到齿系误差,需要在后续工作中进一步改进。
[1] Panasonic可编程控制器FP系列编程手册[CP].ARCT1F313 0409.
[2] YASKAWA.Σ-Ⅱ系列SGM H/SGDH用户手册[CP].SIGPS80000005A.
[3] 松下电工株式会社.可编程控制器FP-X用户手册[CP].ARCT1F409C.