一种偏置动量卫星的三轴姿态控制方法
2008-12-19吴丹
吴 丹
(北京控制工程研究所,北京 100190)
一种偏置动量卫星的三轴姿态控制方法
吴 丹
(北京控制工程研究所,北京 100190)
提出了一种滚动-偏航平面两自由度偏置动量控制方法。在分析某通信卫星平台所受的环境干扰力矩对姿态扰动的基础上,依据Y轴偏置动量大小的影响、构型的角动量包络、动量轮最大角动量变化值和可靠性等参数,与现有的四轮金字塔构型两自由度偏置动量控制进行了比较,其性能更优越。
偏置动量控制;通信卫星;姿态控制;动量轮构型
1 引 言
经过几十年的发展,静止轨道通信卫星市场对通信卫星的使用寿命提出了更高要求。在地球同步轨道正常模式下,通信卫星姿控子系统可利用的磁力矩小,仅采用喷气控制会造成姿态不稳定且消耗过多燃料,而动量轮连续控制使姿态更稳定,更节省燃料,卫星工作寿命更长。
本文首先探讨偏置动量大小对三轴姿态控制精度的影响,并在分析空间干扰力矩对静止轨道通信卫星姿态扰动的基础上,比较了两种配置四轮构型的偏置动量控制的性能。
2 动量轮控制概述
图1为三个动量轮工作、一个动量轮冷备份构型。动量轮1、2、3在空间构成对称三棱锥,其中动量轮1、2、3的轴线与 -Y轴的夹角均为 β;动量轮1、2、3的轴线在 XOZ面上的投影见图 1(b)。动量轮1的轴线投影在X轴上;动量轮2的轴线投影与+X轴夹角为120°,与+Z轴夹角为30°;动量轮3的轴线投影与 +X轴夹角为120°,与 -Z轴夹角为30°。动量轮4为冷备份轮,动量轮4的轴线与 -Y轴的夹角为β,在XOZ面的投影与X轴夹角为60°,与-Z轴夹角为30°。

图1 三个动量轮工作一个动量轮冷备份构型图
图2为四轮金字塔构型图。其中,X轴指向飞行速度方向,Z轴指向地心方向,Y轴垂直于轨道面,并与X、Z轴满足右手法则。四轮金字塔构型中,4个动量轮的轴线与-Y轴夹角均为 β,它们在XOZ面的投影如图2(b),四轮金字塔构型中的4个动量轮的轴线与-Y轴夹角均为β;动量轮1、3轴线与 ±X轴夹角为α,动量轮2、4轴线与±Z轴夹角亦为 α。在此,α=0。
下文统一将四轮金字塔构型简称为四轮构型,将三个动量轮工作一个动量轮冷备份构型简称为三轮构型。

图2 四轮金字塔构型图
四轮构型和三轮构型的俯仰偏置动量被设定在-Y轴,以满足章动模式和轨道速率模式交互控制的稳定性。俯仰控制采用的经典PI控制,是一种简单的单轴动量控制,这里不再赘述。滚动-偏航控制回路由角动量控制回路和角动量卸载回路构成。正常工作模式下陀螺关闭,滚动-偏航控制器采用PI控制。滚动和偏航由于环境干扰力矩长期积累的角动量被存储于动量轮中,或成为滚动和偏航姿态误差,直到超出控制精度允许范围时进行喷气卸载。
3 动力学和干扰力矩影响
3.1 卫星姿态动力学
静止轨道通信卫星正常运行期间,剩余推进剂扰动不大,且其他影响因素也较小,因此假定卫星为刚性卫星。星体姿态动力学方程如下:

其中,ψ、φ和θ分别为偏航姿态角、滚动姿态角和俯仰姿态角。偏置动量在卫星本体坐标系Y轴的分量hy=-hb,其中 hb为偏置角动量值。Tcx、Tcy和Tcz为卫星沿本体坐标系X轴、Y轴和Z轴的控制力矩。Tdx、Tdy和 Tdz为卫星沿本体坐标系 X轴、Y轴和Z轴的外部干扰力矩。在静止轨道,外部干扰力矩以太阳辐射压力矩为主。Ix、Iy、Iz为卫星沿本体坐标系X轴、Y轴和Z轴的转动惯量,以某通信卫星平台为背景,取值为 Ix=14 000 kg·m2、Iy=4 000 kg·m2、Iz=12 000 kg·m2。
3.2 太阳光压力矩影响
以某通信卫星平台数据为例,太阳光压力矩在忽略傅立叶级数的三次及三次以上谐波后,展开成傅立叶级数的结果及系数如式(2)和表1:

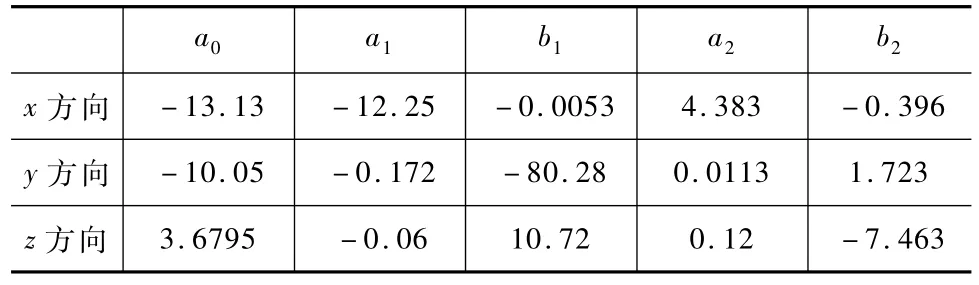
表1 太阳光压力矩傅立叶展开系数(×10-6 N·m)
根据式(2)和表1在 Simulink中仿真太阳光压力矩对滚动轴和偏航轴姿态的影响,可得图3。由图3可知,太阳光压力矩使卫星的滚动和偏航误差不断增大。

图3 太阳光压作用下的滚动和偏航姿态
在静止轨道正常模式下,姿态偏差较小,卫星本体坐标系与轨道坐标系近似重合。则有角动量H在轨道坐标系下的表示为

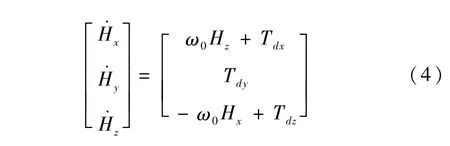

n天时间后三轴角动量的常值变化量ΔHc为

三轴角动量的日周期变化量最大幅值ΔHp为

当不考虑动量轮摩擦力矩影响时,不同卸载间隔情况下太阳光压力矩引起的角动量变化见表2。

表2 太阳光压力矩引起的角动量变化量
4 两种构型的性能分析和比较
4.1 偏置动量大小的影响
由动力学方程(1)可知,选取较大的偏置角动量将增加滚动和偏航的动力学耦合。偏置动量hb应满足下面关系

式(6)给出了对偏置角动量的一个宽泛的要求。总体来说,Y轴偏置角动量应在深入分析偏航指向精度和外干扰力矩的基础上适当选定。通常陀螺定轴性需要的 hb值远大于式(6)给出的范围[1]。
在稳态情况下,单自由度角动量装置的控制量与滚动角成正比,姿态稳态误差为[2]:
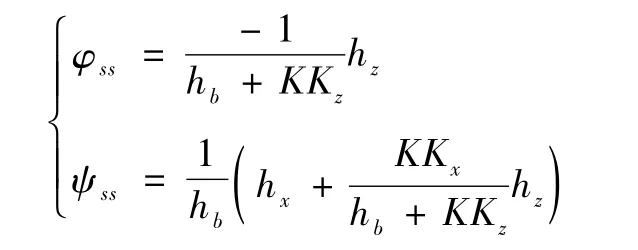
其中,hx、hz为扰动角动量,K为姿态角的反馈增益,Kx和 Kz为分配系数,且 Kx≫ Kz。
由上可知,扰动角动量在滚动轴和偏航轴上相互交替,并以长周期螺旋方式增长;偏置角动量 hb越大,滚动角和偏航角的稳态误差越小。应根据姿态精度要求选取合适的偏置动量值。
规定三轮构型和四轮构型中动量轮标称角动量均为50 N·m·s,它们的偏置动量分别见表3和表4。
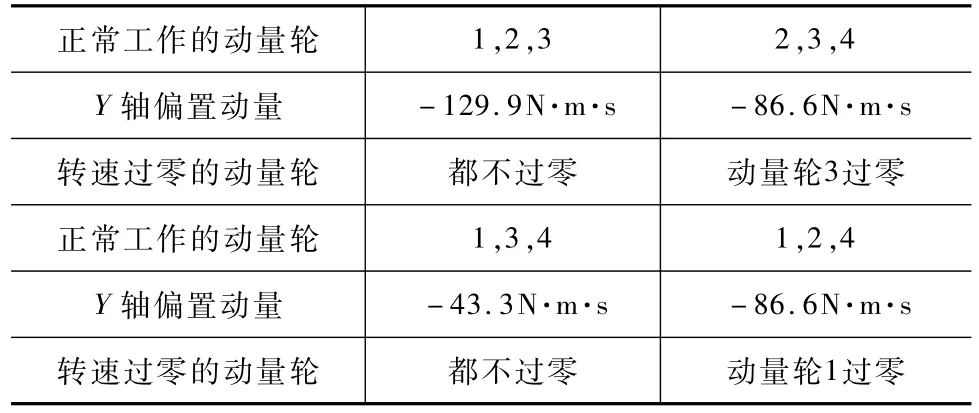
表3 三轮构型各种工作状态下的偏置动量

表4 四轮构型各种工作状态下的偏置动量
由表3和表4比较结果可知,四轮构型各工作状态均有较大的偏置动量值,有较好的陀螺稳定性,但在故障情况下,动量轮均有过零的情况。而三轮构型除了在动量轮2故障的情况外,偏置动量值均较大,可满足稳定要求,使姿态稳态误差较小,且无故障工作模式下功率要求比四轮构型低。
4.2 动量轮正常工作时三轴角动量包络
设定单个动量轮角动量容量Δh的范围为-5~5 N·m·s,则两种构型各轴的角动量容量如下。
三轮构型(β=30°):
X轴:±2Δh sinβ=±5 N·m·s,
Y轴:±3Δh cosβ=±12.99 N·m·s,
Z轴:±2Δh sinβcos30°=±4.3 N·m·s。
四轮构型(α=0°,β=45°):
X轴:±2Δh sinβ(sinα+cosα)=±7.07 N·m·s,
Y轴:±4Δh cosβ=±14.14 N·m·s,
Z轴:±2Δh sinβ(sinα+cosα)=±7.07 N·m·s。
比较可知,四轮构型角动量容量包络比三轮构型大。同时,两种构型在Y轴方向均有较大容量。
4.3 太阳光压作用下各动量轮最大角动量变化量
四轮构型的角动量分配矩阵为

其中 α=0°,β=45°。
三轮构型的角动量分配矩阵为

其中 β=30°。
由于太阳光压引起的三轴角动量变化量为
将表2内不同时间的角动量变化值代入式(7)和式(8),可得表 5和表 6。

表5 三轮构型最大角动量变化量
当任意一个动量轮转速超出轮速上下限时,卸载动量轮转速达到标称转速附近。由表5和表6可知,三轮构型在动量轮无故障工作时,动量轮卸载时间间隔大约为5天;四轮构型在动量轮无故障工作时,动量轮卸载时间间隔大约为5天。从卸载频率的角度考虑,相同时间内四轮构型和三轮构型卸载次数相当,但是三轮构型中的三个动量轮均需要角动量卸载,而四轮构型中仅有一个动量轮需要卸载。

表6 四轮构型最大角动量变化量
4.4 可靠性
两种构型在动量轮发生故障后进行系统重构,为了比较两种构型的可靠性高低,使用可靠度参数来衡量,在此不考虑轮构型中某两动量轮损坏仍可工作的情况。
参考TELDIX公司动量轮有关技术数据,与可靠性相关的参数为:单个动量轮的故障率λ≈370×10-9/h。则18年寿命内单个动量轮的可靠度为

三轮构型的可靠性模型取带旁联的串并联模型[3],可求得其可靠度 R1为

四轮构型的可靠性模型为 r/n(G)模型[3],其中,r=3,n=4,可求得其可靠度 R2为
将单个动量轮的可靠度 R(t)代入式(9)和式(10)可得
由计算结果可知,三轮构型的可靠性比四轮构型的可靠性高。
5 结 论
目前国内通信卫星姿态控制平台在正常工作模式下采用偏置动量控制。本文在继承现有的滚动-偏航平面单自由度轮控技术的基础上,提出了一种滚动-偏航平面两自由度轮控构型。从环境力矩的影响着手,通过比较两种构型偏置动量大小及其影响,构型的角动量包络,动量轮的最大角动量变化值和可靠性等参数综合评价了两种构型。分析结果表明,两种构型提供的偏置角动量均可满足系统的稳定性要求,四轮金字塔构型的各轴角动量容量略高于三轮构型,且动量轮卸载时间周期比三轮构型更长;而三个动量轮工作一个动量轮备份的构型的可靠性高于四轮构型,且功耗低于四轮金字塔构型。
[1] Dougherty H J,Scott E D,Rodden J J.Analysis and design ofWhecon-an attitude control concept[C].The 2nd AIAA Communications Satellite Systems Conference,San Francisco,USA,Apr.8-10,1968
[2] 章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,2005
[3] 曾声奎.系统可靠性设计分析教程[M].北京:北京航空航天大学出版社,2001
A Method for Three-Axis Attitude Control of Mom entum-Bias Satellite
WU Dan
(Beijing Institute of Control Engineering,Beijing 100190,China)
A 2-Degree-of-Freedom(DOF)control wheel configuration in the roll/yaw plane is presented for the satellite attitude control.On the basis of analysis of environmental disturbance torques to some communications satellite platform,the wheel configuration is compared with the existing four-wheel pyramidal configuration according to parameters such as effect of biased momentum magnitude, storage capability,maximum momentum variation,reliability.It is concluded that the proposed configuration exceeds the four-wheel pyramidal configuration in performances.
momentum-bias control;communications satellite;attitude control;wheel configuration
2008-03-18
吴丹(1982-),女,湖北人,硕士研究生,研究方向为导航制导与控制(e-mail:psd1917@hotmail.com)。
V1
A
1674-1579(2008)03-0051-04
