主动悬架星球车移动系统姿态控制研究
2008-12-19邹大力曲广吉
邹大力,杨 雷,曲广吉
(中国空间技术研究院,北京100086)
主动悬架星球车移动系统姿态控制研究
邹大力,杨 雷,曲广吉
(中国空间技术研究院,北京100086)
主动悬架星球车比被动悬架星球车有更好的环境适应性和运动能力。但由于主动悬架包含主动悬架机构和关节,因此对其进行有效控制将更复杂。基于星球车运动速度较低的特点,应用系统稳定性准则研究了主动悬架的构型与姿态控制,设计了相应的控制方法。在ADAMS和MATLAB下的联合仿真表明了该方法的可行性,而且验证了主动悬架星球车在运动稳定性方面的优势。
星球车;被动悬架;主动悬架;移动系统;姿态控制
1 引 言
目前在星球表面探测中,以美国 JPL开发的“勇气号”和“机遇号”为代表的被动悬架星球车得到了广泛应用。但这类星球车只能被动地适应环境地形的变化,且其运动能力受限于被动悬架机构的构型特性,仅能适应特定的地形。为进一步提高星球车的运动能力,国际上正在对星球车的主动悬架及其相关技术进行积极地研究[1],并已经开发出了多款试验样机。主动悬架通过主动调节机构赋予悬架系统主动改变构型的调节能力,可进一步提高星球车的运动能力和环境适应性。
被动悬架星球车移动系统的控制主要包括移动系统的转向、路径和牵引等行进控制;而主动悬架星球车由于其移动系统包含主动悬架机构,因此对主动悬架星球车的运动控制除了包含上述被动悬架移动系统的控制外,还包括对悬架构型的主动关节控制和姿态控制。所以主动悬架星球车与被动悬架星球车相比,在运动控制上更复杂,需要针对主动悬架星球车的特点,开发有效的控制方法。
本文在对主动悬架星球车移动系统进行可重构性分析的基础上,结合主动悬架构型对环境适应性的评定准则和最优悬架构型的优化方法,研究适于主动悬架星球车移动系统的控制策略和控制流程,并依据设计的控制律对主动悬架星球车的运动性能进行初步的仿真评估。
2 主动摇臂转向架式星球车
摇臂转向架式悬架属于非弹性被动悬架,在JPL得到了广泛应用。这种悬架由两个左右对称的单侧摇臂系统组成(图1),两侧摇臂通过差速器连接,使车体的俯仰为两侧摇臂的平均俯仰。每个单侧摇臂系统包括一个摇臂和一个转向架,转向架可线性地平均地形的变化。采用这种悬架的星球车在复杂地形上行驶时,车体的振动幅度小于地形的起伏幅度,能越过相当于车轮直径大小的障碍。
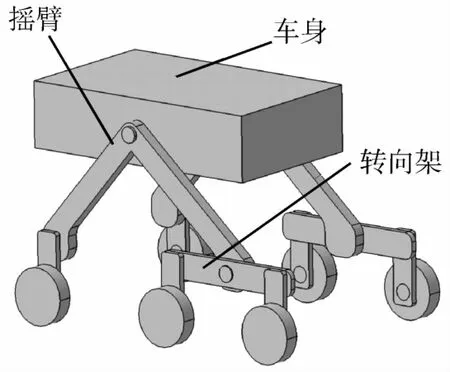
图1 摇臂转向架悬架模型
摇臂转向架式悬架仅由被动关节和连杆组成,因此该悬架对地形的顺应能力受连杆机构自身工作空间限制。为进一步提高该悬架性能,应用JPL开发采样返回星球车的设计思想,将单侧被动摇臂分为前后两个主动摇臂(图2),用驱动电机分别调节两个摇臂之间的角度,可提高星球车的越障能力和车体稳定性,进而实现主动摇臂转向架悬架的设计。
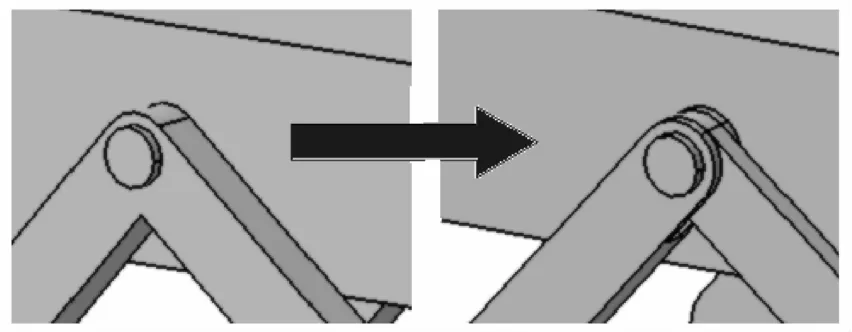
图2 摇臂转向架悬架的主动化
3 主动悬架构型的可重构性分析
从主动摇臂转向架式悬架的设计可知,该主动悬架包括了两个附加的主动肩部关节,因此对主动悬架的控制可归结为对这两个肩关节转动运动的控制。在对主动悬架应用适当的控制策略和控制律前,需要对主动悬架机构的可重构性进行分析。可重构性分析即指在星球车处于静止状态时,对悬架机构的自由度进行分析。根据主动悬架构型的运动学重构特性,可将主动悬架分为以下两类:
(1)内部可重构悬架
内部可重构悬架星球车在静立于地面时,其机构的自由度大于或等于1。此时在悬架构型调节过程中,车轮与地面的接触点相对地面保持固定,也就是说外部的地形对构型的调节和重构过程没有影响,星球车仅仅根据当前悬架的各关节角、车辆的滚动角和俯仰角信息,结合车辆的运动学关系,就可对当前构型状态进行判断并对构型进行调节。
(2)外部可重构悬架
外部可重构悬架星球车静立于地面时,其机构的自由度小于或等于0。此时悬架在调节过程中,车轮与地面的接触点相对地面会产生位移,也就是说地形的变化会影响悬架构型的重构过程。因此,在这种情况下,如果没有地面轮廓信息,就不可能找到一种全局优化的方法对悬架结构进行配置。这也是对外部可重构悬架进行构型调节的问题所在。为了解决该问题,设在车轮与地面接触点附近的很小区域地面轮廓没有明显变化,则可以找到此时主动悬架构型的一个局部最优构型。在悬架参数优化过程中,优化限制除运动关节限制外,还应包括车轮与地面接触点的位移限制。
4 主动悬架星球车的运动学建模
星球车的运动速度较低,通常其动力学特性对系统性能的影响并不明显,且考虑计算的简便性,目前对星球车的控制多基于其运动学模型,因此需要建立合理、准确的星球车运动学模型。
主动摇臂转向架式星球车可简化为车体、左右摇臂、转向架和车轮等共13个部分。可用D-H方法建立一系列坐标系来表示星球车各运动部件间的平移和旋转关系(图3)。建立车体坐标系 R,它位于星球车车身质心位置,随着星球车的运动而变化,其x轴指向车辆前进方向,y轴横跨车身,z轴表示车辆的上下运动情况。R坐标系相对于惯性坐标系可用矢量[xRyRzRφRxφRyφRz]T表示,其中(xR,yR,zR)表示车辆质心的位置,φRx为滚动角(侧倾角),φRy为俯仰角,φRz为偏航角;在差速器上定义坐标系D;定义坐标系B1和B2分别于车身两侧的转向架关节处,B3和 B4分别于车身两侧后轮转向点处,它们均可由差速器坐标系D经过旋转和平移得到;定义各车轮的转向坐标系为S1,S2,…,S6;对每个车轮均定义一个附于车轮轴上的坐标系 A1,A2,…,A6。假定车轮为刚性轮,地面不发生变形,且车轮与地面只存在单点接触;定义车轮与地面的接触坐标系为C1,C2,…,C6。各坐标系之间的变换关系可用D-H参数表示[2]。
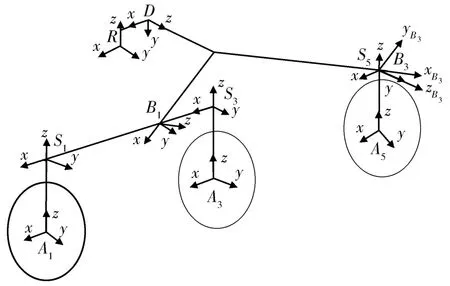
图3 主动悬架星球车左侧的各个变换坐标系
星球车的车体坐标系R与每个车轮轴坐标系Ai之间的变换用RTAi(q)表示,该变换依赖于连杆和关节变量q。为简化分析,设接触坐标系位于对应车轮坐标系沿z轴负向车轮半径的位置,变换矩阵为AiTCi。则由坐标系R到车轮接触坐标系Ci的变换为




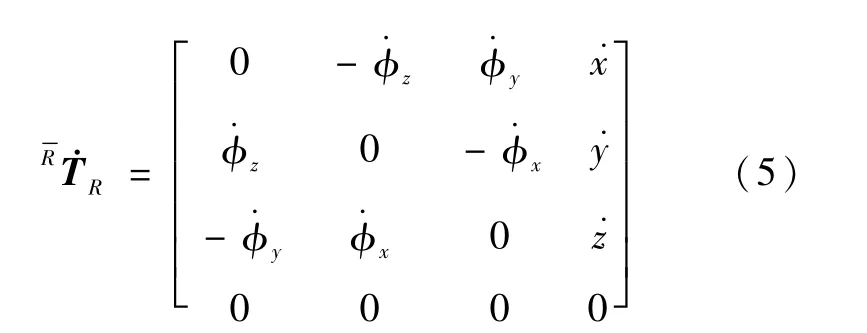
由于式(2)右侧的矩阵乘积也应有式(5)的结构,将式(3)和式(4)代入到式(2)中,并对应两侧矩阵的相同单元,则可将车体位姿用关节角速度、车轮滚动角速度表示

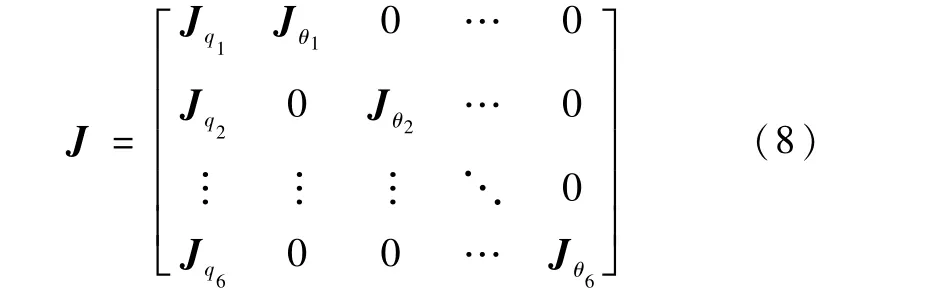
其中,Ji是车轮i的Jacobian矩阵,Jqi和Jθi为˙q和在Ji中对应的子矩阵。将表示所有单个车轮的式(6)组合为一矩阵方程
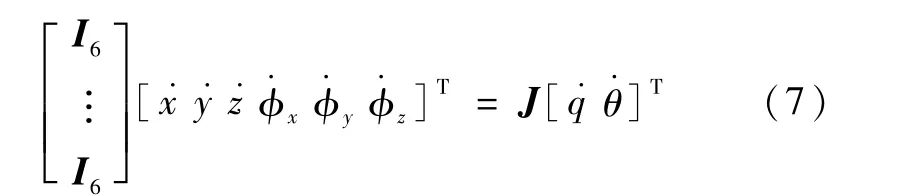
则可得整个星球车的运动学方程。式中I6为6阶单位矩阵,为由,…组成的向量,J是由J1,J2,…,J6组成的系统 Jacobian矩阵,且
进一步基于式(7)即可进行星球车的运动学和逆运动学求解。
5 主动悬架构型的评定准则
主动悬架构型控制的目的是依据指定的性能指标,通过调节主动关节变量角以提高移动系统的移动能力和适应能力。其中性能指标通常包括静态稳定性、车轮牵引力和车轮负载的均衡性以及车体的离地间隙等,也可以是上述多个指标的组合。
由于主动悬架星球车多在复杂路面环境中运动,因此在坎坷不平的地面和复杂的三维地形条件下,星球车的运动稳定性(抗倾翻能力)非常重要。主动悬架星球车的一个突出特点就是可对星球车的姿态进行主动调节,目前对于主动悬架的构型控制也多应用以稳定性为主的评定准则。
基于稳定性准则的评定方法在腿式移动系统中应用较多。早期的研究主要针对平坦路面和定速行走系统,其基本出发点是使车辆重心的投影位于支持多边形内。经过多年研究,目前对低速运动的移动系统多应用静态稳定判据,包括重心投影法[3]、静态稳定边界法[4]、纵向稳定边界法[5]、偏转纵向稳定边界法[6]、能量稳定边界法[7]和稳定锥法等。由于稳定锥法计算简单,因此较适合用于主动悬架星球车构型适应性的评定(图4)。
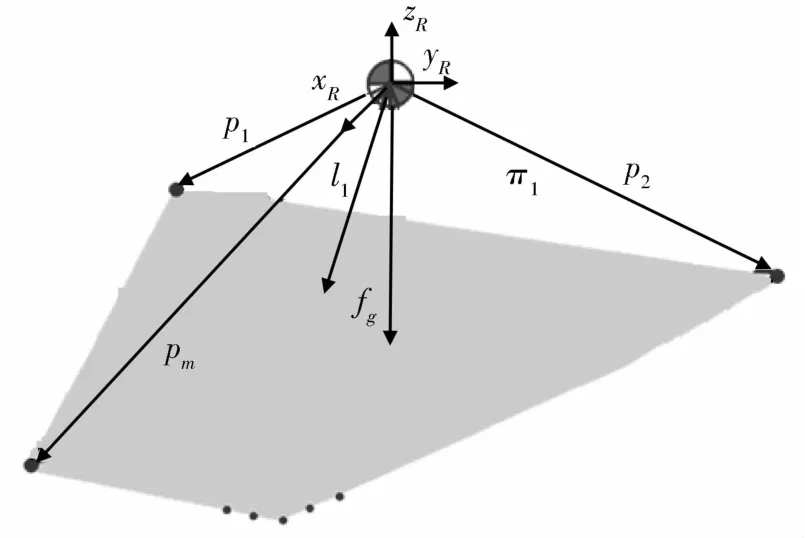
图4 稳定性定义
定义车体坐标系R的原点到车轮与地面接触点的矢量为pi。由相邻的pi和pi+1可定义平面 πi,则垂直于该平面的单位矢量为

星球车的单位重力矢量在坐标系R中可用车体的俯仰角和滚动角表示:
这是由于社会资本具有自治性特点,社会资本存量的增加,意味着自我治理的社区居民数量的增加,便在一定程度上可以大大减少社区治理成本。

进一步定义平面πi的稳定性指标为上述两个单位矢量的点乘:

则有μi的数值越大,稳定性越好。当 g落于 πi平面内时,即 g与 li垂直时,μi=0。当 μi<0时,星球车将发生倾覆。
6 主动悬架构型的优化建模
结合星球车运动稳定性评定指标和星球车车体的离地间隙指标可得悬架构型的优化目标函数为
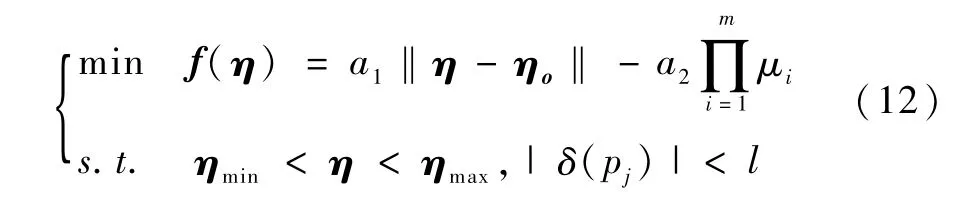
其中 η=[η1η2]T为车体两侧的主动跨关节角,ηo为在平坦路面上行进时主动跨关节角的默认值,a1和a2为加权系数。在f(η)中设置第一项的目的是避免当星球车在平面上运动时,η出现最大扩展的情况,同时也能使星球车在行进过程中保持一定的离地间隙。第二项的连乘项表示,若使f(η)为最小,则应使连乘项为最大,即应使星球车的稳定性最好。式(12)中的两个限定条件分别为关节角运动限制和地面接触点的位移限制。
针对不同主动悬架星球车的构型特点,建立优化目标函数的复杂程度也不同。由于所设计的主动悬架只有两个主动关节,式(12)相对简单,因此选择基于函数梯度的数学优化方法进行解算。
7 主动悬架的运动控制程序
根据路面状况和星球车姿态,按照以下步骤进行主动悬架构型的调整 (图5):
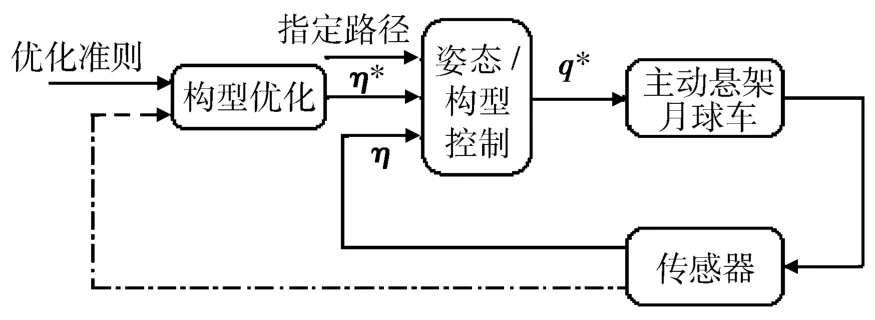
图5 主动悬架星球车移动系统的构型控制过程
1)对当前构型的环境适应性进行评估。基于已选定的悬架构型评定准则,根据星球车配置的车载传感器和自身的几何参数等信息对悬架构型的环境适应性进行判定。
3)确定各主动关节的调节速度。对组成悬架的各主动关节,其控制律应用比例反馈控制

式中,η为当前主动关节参数,K为比例反馈系数矩阵。
4)逆运动学分析。由最优构型差异、指定路径和预期运动状态,根据式(7),进行逆运动学分析和求解,可得到各驱动机构的运动速度q*。
5)控制执行。在运动控制系统的作用下,将当前的运动配置参数调整为优化过的运动配置参数,完成主动悬架星球车的运动控制过程。
8 仿真分析
在ADAMS软件平台上,构建主动摇臂转向架式星球车虚拟样机。样机的前后摇臂长分别为660 mm和430 mm,车身质心高度为630 mm,左右侧悬架距离为800 mm,车轮直径为300 mm。经分析该样机悬架的可重构度小于0,为外部可重构悬架。应用ADAMS和MATLAB协同仿真技术,分别仿真被动悬架星球车和主动悬架星球车在不平坦路面上的运动,并对两者的性能进行比较,验证主动悬架机构控制算法。
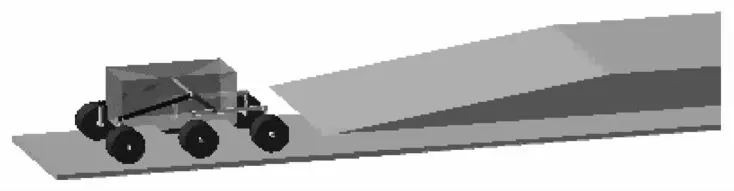
图6 主动悬架星球车和构造的不平坦路面
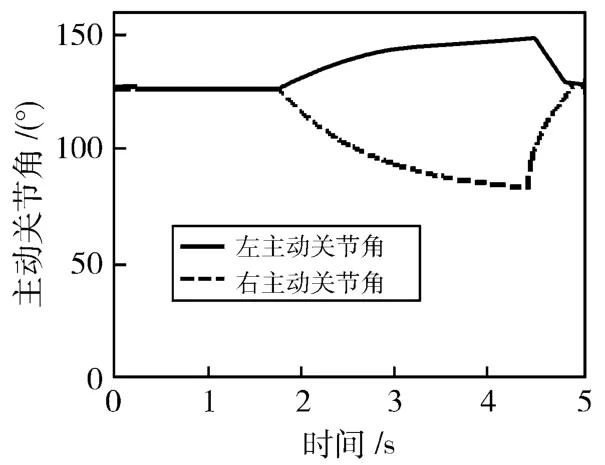
图7 主动悬架两侧主动关节角
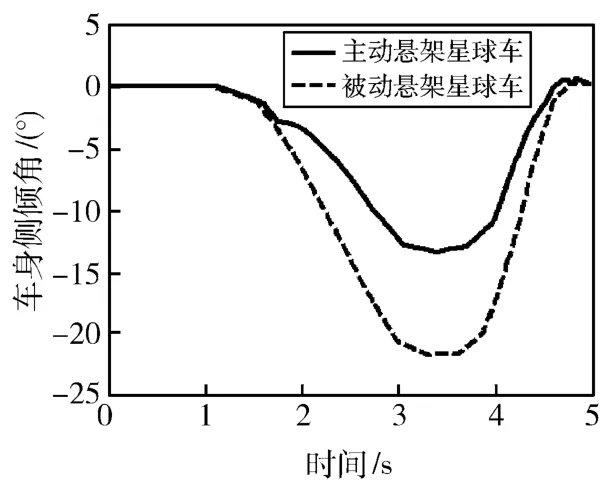
图8 星球车车身侧倾角比较
构造的不平坦路面如图6所示,其中路面特征是左高右低,左侧高于右侧400 mm。分别对主动悬架和被动悬架星球车模型进行时长为5s的仿真。仿真结果如图7-图9所示。由图7可知,为提高主动悬架星球车在左高右低路面上运动的稳定性,在悬架控制机构的调节下,主动悬架的左侧主动关节角度逐渐增大,而右侧主动关节角度逐渐减小。由图8和图9可知,在行进过程中,主动悬架星球车的侧倾角仅为被动悬架星球车侧倾角的一半,而两者的车身俯仰角基本相同。由仿真分析可得:进一步提高路面的侧倾角后,被动悬架星球车在行进过程中所允许的最大极限侧倾角为32°,而所设计的主动悬架星球车所允许的最大极限侧倾角可达到46°,抗侧倾能力可提高近50%,这说明主动悬架星球车有更优越的侧倾稳定性。
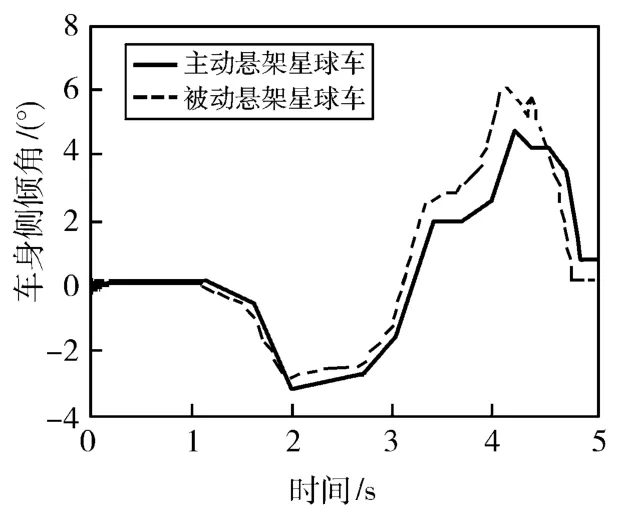
图9 星球车车身俯仰角比较
9 结 论
主动悬架星球车与被动悬架星球车相比,在增加悬架机构自由度、提高悬架适应环境能力的同时,也增加了移动控制系统设计的复杂性。本文基于稳定锥准则,确定了当前环境下的主动悬架的最优姿态,并进一步设计了进行主动悬架机构控制的算法和程序。该算法和程序不但适用于内部可重构悬架,也适用于外部可重构悬架。在ADAMS和MATLAB下进行的联合仿真结果不但验证了该控制方法的正确性和可行性,还表明主动悬架星球车具有很好的运动稳定性。
[1] Sreenivasan S,Waldron K.Displacement analysis of an actively articulated vehicle configuration with extensions to motion planning on uneven terrain[J].Trans.ASME J.Mechanical Design,1996,118(6):312-317
[2] 邹大力,杨雷,曲广吉.基于 KANE法的星球车移动系统动力学建模[C].中国飞行力学学术年会,贵阳,2007
[3] McGhee R,Frank A.On the stability properties of quadruped creeping gait[J].Mathematical Bioscience,1968,3:331-351[4] Mcohee R B,Iswandhi G I.Adaptive locomotion for a multilegged robot over rough terrain [J].IEEE Transactions on Systems,Man and Cybernetics,1979,9(4):176-182
[5] Zhang C D,Song SM.Gaits and geometry of a walking chair for the disabled[J].Journal of Terramechanics,1989,26(3):211-233
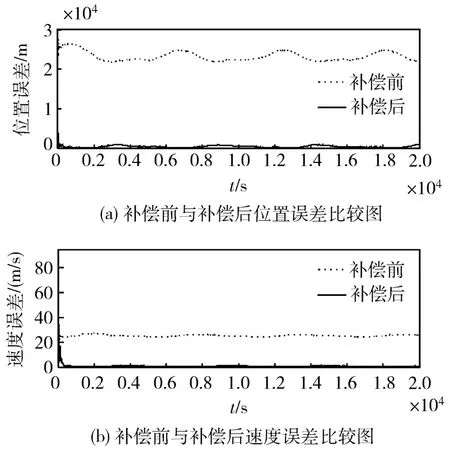
图9 补偿前与补偿后滤波误差比较图
5 结 论
以往的研究往往只考虑地球扁率对航天器轨道摄动的影响,忽略了对敏感器测量数据的影响,即使考虑了对测量数据的影响,也只考虑对扫描式敏感器测量数据的影响。本文研究了地球扁率对紫外敏感器测量数据的影响,并且给出补偿方法。仿真结果表明,此补偿方法可以有效地提高地心矢量的测量精度,从而提高卫星导航精度。
参考文献
[1] 耿建中,肖业伦,韩潮.基于紫外敏感器的卫星自主导航方法研究[J].航天控制,2007,25(2):47-51
[2] 郑月英,钱唯德,罗 俊,赵世范.基于天象匹配的地心矢量确定方法[J].航天控制,2006,24(2):43-47
[3] 李捷.基于地球椭球特性的红外地球敏感器测量值的修正算法[J].航天控制,1997,15(4):63-69
[4] 王立,成像敏感器信息处理算法研究[R].北京:中国空间技术研究院博士后研究工作报告,2006
[5] 魏春岭,李 勇,陈义庆.基于紫外敏感器的航天器自主导航[J].航天控制,2004,22(3):35-39
[6] Zhang C D,Song S M.Stability analysis of walking chair for the disabled[J].Journal of Robotic Systems,1990,7(2):243-276
[7] Messuri D A.Optimization of the locomotion of a legged vehicle with respect to maneuverability[D].Ph.D Dissertation,The Ohio State University,1985
Research on the Attitude Control of Active Suspension Rover
ZOU Dali,YANG Lei,QU Guangji
(China Academy of Space Technology,Beijing 100086,China)
As compared with the passive suspension rover,the active one enhances themotion capabilities on irregular and unknown terrains.Due to the existence of redundantly actuated system of active suspension rovers,the control system is more complex.Base on the low speed of rover movement,the research on attitude control of the active suspension is conducted and a method for stability is proposed.The simulation in the ADAMS and MATLAB illustrates the effectiveness of the method and high stability of the rover movement.
rover;passive suspension;active suspension;locomotion;attitude control

V448.2
A
1674-1579(2008)03-0012-05
2008-03-21
邹大力(1973-),男,黑龙江人,博士后,研究方向为多体动力学(e-mail:zoudl99@yahoo.com.cn)。
