月球巡视探测器系统研究
2008-12-19杨孟飞陈建新
杨孟飞,贾 阳,陈建新
(1.中国空间技术研究院,北京100094;2.北京控制工程研究所,北京100190)
月球巡视探测器系统研究
杨孟飞1,贾 阳1,陈建新2
(1.中国空间技术研究院,北京100094;2.北京控制工程研究所,北京100190)
简要回顾月球探测的发展现状,给出月球巡视探测器的概念和主要功能,据此分析和研究系统方案设计、分系统组成、工作状态和工作模式。最后提出月球巡视探测器的关键技术,以期为月球巡视探测器的工程研制提供参考。
月球巡视探测器;月球探测;综合电子系统
1 引 言
月球是地球唯一的天然卫星,由于其独特的空间位置和潜在的资源,已成为各国进行深空探测的首选目标。从1959年开始,包括前苏联、美国、日本和欧洲等多个国家和地区进行了大量的探测工作,至今经历了三个阶段:
1959~1976年是月球探测第一次高峰期。先后发射了108颗月球探测器,发射成功45颗,其中美国22颗,苏联23颗。这期间的月球探测器主要包括:美国的 “先驱者”(Pioneer)、“徘徊者”(Ranger)、“勘察者”(Surveyor)、“月球轨道器”(Lunar Orbiter)以及“阿波罗”(Apollo)系列月球探测器,苏联的“月球号”(Luna)和“探测器”(Zond)两个系列的月球探测器。在此期间,苏联将两辆月球巡视探测器成功地送到了月球表面,并开展了一系列科学探测。
1976年至80年代末是月球探测宁静期,此阶段未进行过任何成功的月球探测活动。
90年代初至今是月球探测的又一次高峰期。美国于1989年提出了“重返月球”的设想,随后分别于1994年和1997年发射了“克莱门汀”(Clementine)探测器和 “月球勘探者”(Lunar Prospector)探测器。2004年1月,美国又宣布了新的太空计划,明确提出在2020年前重返月球并将月球作为一个发射基地[1]。欧空局(ESA)1994年就提出了重返月球、建立月球基地的详细计划,并于2004年2月正式公布了“曙光女神”(AURORA)计划[2-3],提出开发月球资源、建立月球基地等。俄罗斯、日本、印度等国也纷纷制定以月球能源与资源的开发为目的的月球探测计划。在各航天国家和组织推出的月球探测计划中,大都将巡视探测作为科学探测的重要手段,提出了各种具有不同特点的巡视探测器,并开展了方案论证和地面样机研制工作。
随着中国经济和科学技术的发展,已将月球探测作为重大工程开始实施[4-5],并于2007年成功发射了嫦娥一号月球探测器,实现了绕月探测工程的目标,现正着手实施月球软着陆探测和巡视勘察工程。在这一阶段的工作中,月球巡视探测器是其主要组成部分,因此开展这方面的研究工作是非常必要的。本文就是在这种情况下,总结已进行的月球巡视探测器的研究工作,希望为月球巡视探测器的研制提供参考。
2 基本概念和要求分析
巡视探测器指能够在行星或其卫星表面移动,完成探测、采样和运输等任务的探测器。它也可以描述为能适应行星或其卫星表面环境,携带科学仪器巡视探测的航天器。根据探测对象,可分为月球巡视探测器(月球车)和火星巡视探测器(火星车)等。本文研究的是月球巡视探测器。
通过对巡视探测器概念分析,巡视探测器应具有移动性、适应性、自主性和实用性4个基本特征 。
1)移动性:巡视探测器可在星球表面移动,扩展探测范围,为科学目标的实现提供重要手段。
2)适应性:巡视探测器必须具备环境适应性,不仅要解决近地航天器的真空、低温和辐射等环境适应性问题,而且还必须解决如地貌和尘埃等特殊的环境适应性问题,具备抗倾覆、越夜生存等能力,确保其正常工作。
3)自主性:考虑巡视探测的实际通信条件,克服时延和带宽等限制,需具有较高的环境感知与识别、路径规划等能力,具有较强的任务分析、规划及实现能力。
4)实用性:巡视探测器最重要的功能是利用携带的科学仪器对感兴趣的目标实施就地探测,最大程度地实现科学家身临其境的考察和实地勘探。
利用月球巡视探测器对月球进行巡视探测是实现科学探测目标的重要手段,其主要功能包括:
1)与着陆器配合拓展探测范围,实现对巡视探测区域内科学目标的精细探测。
2)解决科学探测目标与工程实施着陆点选取之间的矛盾,克服着陆误差的影响,利用巡视探测器到达感兴趣的科学目标并实现就地探测和分析。
3)满足部分科学仪器的移动探测需求。
4)实现对感兴趣科学目标的采样和运输。
月球巡视探测器一方面是航天器,具有一般航天器的特征;另一方面由于它是在月球表面移动的探测器,为了完成上述任务,它与一般的航天器相比,又有很大的不同,因此对月球巡视探测器的设计提出了新的要求。通过对月球环境的分析,在设计月球巡视探测器时,需要考虑下列因素:
1)近月和月面的辐射环境、真空环境与地球静止轨道的相似。
2)月昼期间月表红外热流变化剧烈,月夜期间长达14天的低温、无光照环境,对巡视器的月面生存提出了挑战。
3)月球巡视探测器在松软月面地形下应具备良好的通过性和越障能力,需要适应的坡度在20°左右。
4)巡视探测器不仅需要通过地面遥操作进行控制,还应具备一定的自主避障能力。
6)应对巡视探测器运动机构的轴承、齿轮以及其他机械装置采取密封措施,为光学仪器设计防尘措施;月球巡视探测器的运动速度也不应设计得过高,以避免由于运动而引起的扬尘。
3 系统方案
3.1 系统构成和功能
通过对巡视探测器任务的研究,借鉴国外巡视探测器系统的划分方法,同时结合中国航天器系统划分方法,可将月球巡视探测器分为9个分系统。
1)移动分系统:能够在月面环境下移动,具备前进、后退、转弯、越障、爬坡等能力,实现运动稳定并具备一定的抗倾覆能力。
2)结构与机构分系统:结构部分承载仪器设备,在各种工况下保持预定的形状并承受住可能遇到的载荷;机构部分实现运动部件在发射段时的压紧锁定、月面工作时展开,完成预定功能,并在过夜时收拢。
3)导航与控制分系统:自主确定当前的相对位置、速度、姿态及航向;对其所处的环境进行有效的感知、建模并识别障碍;规划出安全到达目标点的路径,自主实现局部避障;实现对运动系统实时控制,包括车轮的协调驱动及转向控制、桅杆控制、天线指向控制和机械臂视觉的伺服控制等。
4)综合电子分系统:集中采集、处理和分发月球巡视探测器信息,实现系统状态管理。以最大程度减轻电子系统的质量为目的,按照系统配置最优原则,对平台和有效载荷各分离的电子设备进行集成和综合,充分有效地利用各子系统和设备的信息,提高硬件和软件等各种资源的复用程度,最佳地完成月球探测器的任务。从信息观点看,综合电子系统是采集、传输、存储和处理月球巡视探测器内、外部信息的信息综合系统;从数据管理观点看,综合电子系统为平台和有效载荷提供全面、综合的数据管理与服务,实现巡视器平台和有效载荷数据的统一处理和共享;从控制观点看,综合电子系统是完成巡视器自主决策与控制、协助地面操作人员完成遥操作的控制器集成系统。
5)电源分系统:产生、储存、调节和管理电能,并在巡视探测器各种工作模式下,持续、安全、可靠地为各分系统供电。太阳电池阵是提供能源的主要方式,蓄电池组与温差发电器相结合,则可满足在太阳能不足情况下的用电需求以及月夜时的生存。
6)热控分系统:通过对巡视探测器内外的热交换过程的控制,保证各个部位及仪器设备在整个任务期间都处于规定的温度范围。根据巡视探测器的任务特点,采取被动措施与主动措施相结合的方式来实现热控。
7)测控与数传分系统:建立巡视探测器与地面站和着陆器等的通信链路,实现指令、参数和数据的传输与接收。
8)机械臂分系统:可携带部分科学仪器并靠近所感兴趣的科学目标,是进行就地探测的有效装置。
9)有效载荷分系统:直接实现巡视探测器所要完成的特定科学探测任务的仪器、设备,一般可以分为:科学探测和实验类、信息获取类、信息传输类以及信息基准类。这些科学仪器应根据科学探测目标以及巡视探测器的承载能力来选择和确定。
3.2 工作状态
根据月球巡视探测器的巡视探测任务要求,将月球巡视探测器工作状态初步分为4种,即:初始状态、运行状态、巡视探测状态和月夜休眠状态,这4种状态的主要工作内容见表1。

表1 月球巡视探测器工作状态
3.3 工作模式
月球巡视探测器在与着陆探测器分离后,进行月球巡视勘察的工作模式包括:
1)初始化模式:完成各分系统状态检查,展开太阳电池板和桅杆等,完成通信接口测试。
2)移动模式:通过传感器信息建立环境模型,根据路径规划结果或遥操作指令控制巡视探测器顺次经过指定的路径点,到达阶段目标点。
3)通信模式:完成数据传输。
4)就地探测模式:到达考察任务目标点后进入探测模式,在考察任务结束后,系统切换至通信模式或移动模式。
5)安全模式:进入安全模式的切换条件包括发现被规划遗漏的障碍物后使巡视探测器急停;无法自主找到可穿越路径;判断巡视探测器处于安全临界状态,自身无法解决;以及其他必须由遥操作端解决的情况。安全模式下,巡视探测器除基于保障自身安全需要所必需的功能模块继续工作外,其他运动完全由遥操作端制定,并严格按照遥操作端的指令执行。当地面操作人员确认可恢复正常工作后,发送指令回到正常模式。
正常情况下,移动模式、通信模式和就地探测模式分时进行。主要工作模式间的切换关系如图1所示。首先启动初始化模式,进行正常工作的准备,在接收到指令或任务后,启动移动模式使之经过指定的路径点,到达阶段目标点,在此过程中,如果遇到不安全情况立即进入安全模式,经地面人员确认并恢复正常工作能力后,将巡视探测器重新切换回到正常模式;如果巡视探测器顺利到达目标点,则根据要求转入探测模式进行相应的科学考察或转入通信模式完成与遥操作中心的数据交互;在此期间,如果出现不安全状况,同样进入安全模式;完成科学探测后根据需要进入通信模式或转入移动模式;完成通信任务后也将根据要求转入移动模式。除了上述5个工作模式之外,还存在休眠模式,在奔月、环月和月夜阶段,巡视探测器均处于休眠模式;在月夜来临之前,可根据月球巡视器的状态,结束行走、探测或通信模式,进行月夜休眠模式准备,完成后进入月夜休眠模式;当月昼来临时,巡视器自主唤醒,重新进入初始化模式。
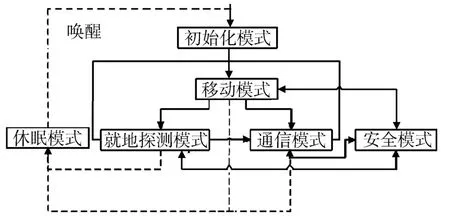
图1 主要工作模式关系图
4 关键技术
根据对月球巡视探测器方案和目前技术基础的分析,提出月球巡视探测器需解决的关键技术包括:1)月面非结构化环境的移动技术;2)基于同位素能源的月面生存技术;3)月球巡视探测器的定位、路径规划与运动控制技术;4)综合电子技术;5)月球巡视探测器仿真与地面验证技术。
4.1 月面非结构化环境的移动技术
月球巡视探测器要完成科学考察,需要具备在有限能源约束下的前进、后退、转弯、爬坡和越障等移动能力,以及实现在复杂月面环境条件下的运动稳定性,以保证巡视探测器安全、平稳地行驶。月球巡视探测器移动性能的优劣直接影响科学探测目标的实现。在月面环境下,移动技术对实现月球巡视探测器安全、可靠行驶是非常重要的。
4.2 基于同位素能源的月面生存技术
巡视探测器要顺利、安全度过长达14个地球日的月夜,就必须解决同位素能源技术、新型热控技术和机构润滑与密封技术。热控和能源系统是否能够提供有效的功能支持,直接关系到巡视探测器能否在月面极端严酷的温度条件下的生存以及探测器上各种设备能否正常工作,其性能直接影响到月球探测任务的成败。受月面大温差变化、高真空以及月尘环境的影响,对巡视探测器所采用的大量机构,必须采取适当措施,彻底解决润滑与密封问题,才能保障其正常工作。如果这些活动机械部、组件转动不灵活或卡死,就会直接影响到执行任务的成败。
4.3 月面自然环境下的定位、路径规划与运动控制技术
月球巡视探测器在自然地形环境中正常行驶并安全到达预先指定的工作点,是月球巡视探测器导航与控制分系统的主要任务。因此,必须具备在月面环境中识别危险与障碍、确定自身姿态与位置、辨别目标位置、规划到达目标位置的路径、沿规划路径移动,以及检测和避碰障碍等能力。
4.4 综合电子技术
月球巡视探测器将在月球表面各种复杂环境中移动,支持所携带的各种先进的科学探测仪器进行探测,并将获取的信息传输到地球,其电子系统应具备图像信息实时获取、信息共享和实时综合处理、高速数据传输、导航和控制的大量运算、数据存储和协调系统工作等功能。受质量限制,必须对月球巡视探测器电子系统进行整合、高度集成,设计并采用具有高性能、多样化的数据采集、处理、压缩、融合、提升、存储、综合传输和系统控制管理功能的综合电子系统。
4.5 月球巡视探测器仿真与地面验证技术
月球巡视探测器作为一种特殊的航天器,在地面上对其各项工作性能进行模拟月球环境下的缜密试验,并对试验结果进行科学的分析和评估十分必要。通过充分的仿真分析与地面试验验证工作,可以达到总体方案比较、关键技术问题分析和技术途径验证等目的。
5 结 论
本文首先简述月球巡视探测器的研究现状,给出月球巡视探测器的概念和作用,在分析月面环境的基础上,给出月球巡视探测器设计时需要着重考虑的因素,讨论了月球巡视探测器系统方案和工作程序及工作模式,最后对月球巡视探测器的关键技术进行了分析,其研究结论可为月球巡视探测器下一步的研制提供参考。
[1] 佟艳春.美国重返月球计划[J].导弹与航天运载技术,2006,(2):27-30
[2] 徐世杰.欧洲空间局的“奥罗拉”计划[J].国际航空,2004,(9):59-61
[3] Santovincenzo A et al.ExoMars 09 CDF study report CDF-14A[R].ESA-ESTEC Publication,2002
[4] 叶培建,彭兢.深空探测与中国深空探测展望[J].中国工程科学,2006,8(10):13-18
[5] 欧阳自远.月球探测的进展与中国的月球探测[J].地质科技情报,2004,23(4):1-5
Research on System Design of Lunar Rover
YANG Mengfei1,JIA Yang1,CHEN Jianxin2
(1.China Academy of Space Technology,Beijing 100094,China;2.Beijing Institute of Control Engineering,Beijing 100190,China)
The state of the art of lunar exp loration is briefly reviewed.Based on the concept and main functions of lunar rovers,system design including composition of subsystems,operational states and modes is analyzed and investigated.Finally,the key techniques of lunar rovers are proposed to give a reference to the engineering development.
lunar rover;lunar exploration;integrated electronic system

V476.3
A
1674-1579(2008)03-0003-04
2008-02-20
杨孟飞(1962-),男,湖南人,研究员,研究方向为控制计算机,控制系统,巡视探测器(e-mail:yangm f@bice.org.cn)。