嫦娥一号卫星的地月转移变轨控制
2008-12-12王淑一王大轶李铁寿张洪华黄江川
宗 红,王淑一,韩 冬,王大轶,李铁寿,张洪华,黄江川
(北京控制工程研究所,北京l00080)
嫦娥一号卫星的地月转移变轨控制
宗 红,王淑一,韩 冬,王大轶,李铁寿,张洪华,黄江川
(北京控制工程研究所,北京l00080)
文章阐述了嫦娥一号卫星地月转移阶段(从星箭分离到进入使命轨道)的高可靠、高精度自主变轨控制方案,介绍了飞行轨道、轨控策略及控制参数优化、星上自主变轨控制的系统设计和相关参数的地面标定等,给出了在轨飞行试验的验证结果。
嫦娥一号卫星;地月转移;轨道控制;自主变轨控制
1 引 言
嫦娥一号卫星于北京时间2007年l0月24日l8时05分04秒由长征三号甲运载火箭从西昌卫星发射中心发射升空。经过一次远地点变轨和三次近地点变轨,嫦娥一号于l0月3l日进入地月转移轨道,并于11月5日准确按计划完成第一次近月制动,成为中国第一颗月球卫星。又经过两次变轨后,她终于到达离月面200km的通过月球两极上空的圆形工作轨道。
嫦娥一号卫星与月球轨道交会过程中地月转移变轨控制至关重要,特别是第三次近地点加速和第一次近月点制动两次关键变轨,其控制窗口具有唯一性和短暂性,必须保证按飞行计划及时、准确地完成各次变轨控制。为此,嫦娥一号卫星采用星上自主定姿、自主姿态控制、自主开/关变轨发动机、自主故障检测以及快速恢复轨控的自主变轨控制方案,由地面配合进行轨控参数优化及推力标定和加速度计标定,并采取保证变轨精度的系统设计,出色地完成了地月转移过程中的各项轨控任务。
文中所指的地月转移阶段是指从星箭分离开始到进入使命轨道的整个过程。本文介绍了嫦娥一号卫星地月转移阶段的飞行轨道和变轨策略、轨道控制大系统、星上自动变轨控制的设计、变轨控制参数的计算和标定、保证变轨精度的其它措施以及飞行验证结果。
2 地月转移飞行轨道及控制要求
2.1 在地月系统中的标称飞行轨道
嫦娥一号卫星的地月转移阶段,包括调相轨道、地月转移轨道和绕月轨道。飞行轨道如图l所示[l]。
嫦娥一号卫星由长征三号甲运载火箭送入近地点200km、远地点5l000km的大椭圆轨道(超GTO)。调相轨道任务是将超GTO轨道变为远地点约400000km的地月转移轨道。星箭分离后,卫星在周期l6小时的超GTO轨道上运行一圈半后,在远地点做一次小的轨道机动,将轨道近地点高度变为600km,再运行一圈半,在近地点进行第一次大的轨道机动,将轨道周期变为约24小时,接着运行l~3圈后,进行第二次近地点变轨,将轨道周期变为约48小时。运行l圈后,在调相轨道运行结束到达最后一个近地点时,进行第三次近地点变轨,使卫星进入地月转移轨道。
地月转移轨道共飞行l l4小时,是接近燃料消耗最少的转移轨道。在转移轨道飞行途中一般都需进行若干次轨道修正,正常情况下是2~3次,一次在离开近地点后的24小时以内完成,最后一次是在到达近月点前的24小时以内完成。
卫星到达近月点后,为了使其变为绕月飞行的月球卫星,需要在近月点进行3次减速机动。依次将轨道周期变为l2小时、3.5小时和l27分钟,最终进入使命轨道。
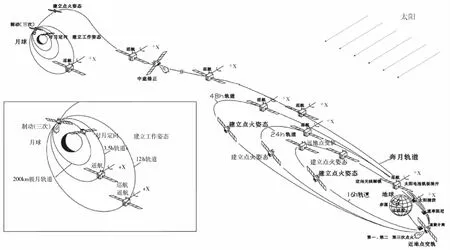
图l 嫦娥一号卫星飞行轨道示意图
2.2 对轨道控制的要求
科学探测要求嫦娥一号卫星的工作轨道为高度200km±25km,相对于月球赤道的倾角为90°±5°。为了到达这一工作轨道,嫦娥一号飞行过程中要经历8~l0次轨道控制,包括l次远地点变轨、3次近地点变轨、l~3次中途修正和3次近月点制动。
在进入地月转移轨道时,很小的初始速度误差就会导致到达近月点时出现几千千米的位置误差,初始速度误差越大,轨道修正所需的燃料就越多。此外,由于卫星在近地点的高度低、速度快,若轨道控制的误差较大,就会导致近地点位置发生变化,这时地面就不能保证连续的测控条件,因此嫦娥一号的轨道控制必须足够精确。
地月转移轨道的入口和第一次近月点制动都具有唯一性。地月转移轨道入口要求必须在特定的时间从特定的位置上进入转移轨道,否则不能按照预定计划与月球交会;第一次近月点制动则要求必须在近月点附近进行减速,否则卫星将飞离月球。如果这两次变轨中任何一次失利,要想重新到达月球附近就需要花费大量的燃料和时间,甚至根本无法实现。
为确保变轨按计划及时执行,考虑到恶劣情况,在没有地面测控支持时,卫星也要具有一定自主变轨的能力。
基于上述考虑,对嫦娥一号卫星的轨道控制提出了精确性和及时性的要求,同时也要具备一定的自主性。
3 星地大回路轨道控制
嫦娥一号卫星轨道控制由星上和地面共同完成。星上部分主要是制导、导航和控制(GNC)分系统及推进分系统的相关设备,包括姿态敏感器(星敏感器和陀螺)、计算机和执行机构(变轨发动机和姿态控制推力器)等,并依靠测控数传分系统同地面保持上、下行通信联系。地面部分主要包括各测控站(船)的跟踪、遥测和遥控设备以及位于北京的航天飞行控制中心。
卫星飞行各阶段,由地面进行精确的轨道测量。获取测距、测速数据和甚长基线干涉(VLBI)系统的测角数据。飞控中心处理观测数据,确定轨道参数。由此在地面制定轨道控制策略,计算优化的变轨控制参数,并适时将有关数据注入星上计算机。卫星根据注入的变轨控制参数自动地进行姿态机动、变轨姿态保持、发动机开关机和巡航姿态恢复等控制过程。轨道机动完成后,地面再进行轨道测量和确定、对轨控效果进行标定和评估以及制定后续的轨控策略,从而构成星地大回路轨道控制。
4 变控制参数计算和推力标定
如前所述,在变轨控制实施过程中,在地面进行的轨控参数计算和轨控后相关参数标定是必不可少的步骤。
4.1 变轨控制的约束条件
变轨控制主要考虑以下约束条件:
l)燃料消耗:嫦娥一号卫星携带的燃料量有限,所能提供的总速度增量受到限制;
2)测控范围:虽然卫星具有一定的自主变轨能力,但是出于安全性考虑,仍希望整个变轨过程都在地面实时监视下进行,而轨道控制时这样的条件不一定能够满足,因此制定轨控策略时要考虑这一次轨控及后续轨控的地面测控条件;
3)卫星能源:卫星轨控过程中,可能处于地球或月球阴影中,或者帆板不一定能够对准太阳,此时卫星依靠电池供电,这要求轨道控制整个过程不能超过电池供电的最长时间。
在不同的阶段和不同的情况下,这些约束条件的重要性不同。在调相轨道阶段主要考虑测控范围的限制;在近月制动时主要考虑卫星能源;在发生故障而需要重新设计轨控策略时主要考虑燃料消耗约束。
4.2 点火姿态和角速度的选择
轨控参数计算时,根据轨控的目标,在满足测控条件的约束下对轨控开机时刻、轨控姿态和轨控时长等参数进行优化,使得在达到目标轨道的同时消耗燃料最少。同时星上还具备匀速转动变轨的能力,轨控过程中推力方向在空间按一定的角速度旋转,可以进一步减少轨控的燃料消耗。
为了保证轨控过程中星敏感器不受日光、月光和地气光干扰,轨控姿态在保证+X(变轨推力)方向的情况下,可以绕+X轴旋转一定的角度以寻找合适的姿态。
4.3 有限推力轨道控制参数计算
在制定轨道控制策略时,按照脉冲变轨方式进行计算,计算过程中只有一个未定变量,即速度增量的大小。轨道控制策略确定后再按照有限推力方式计算当前这一次轨控的控制参数。有限推力轨控时需要确定两个变量:轨控开机时刻、轨控关机时刻/开机时长。
轨控开机时刻的选择:一般情况下,有限推力变轨以近地(月)点为中点,前后各取一半的点火时间。也可以调整开机时刻使轨道的近地点幅角达到期望的目标,这时就要采用牛顿迭代法来调整开机时刻。
轨控关机时刻的选择:首先由脉冲变轨给出关机时刻的初始值,然后再用数值迭代的方法进行精确计算。迭代时要考虑测控条件的约束,若不满足测控条件的约束,则对关机时刻进行修正,以满足轨控时的测控约束。对于近月点制动,关机时刻比较容易确定,只需从开机时刻开始,数值积分到轨道半长轴满足预定目标即可。
4.4 加速度计和发动机推力的在轨标定
加速度计测量量本身包含零位偏差和脉冲当量误差,如不考虑这些偏差将影响轨道控制精度。为保证轨控的准确性,需要对加速度计进行标定并给予补偿。
加速度计的在轨标定分为两个方面,一是对加速度计零位偏差的标定。每次轨控前,统计卫星没有喷气的时间段内加速度计的数据,给出平均值,作为加速度计的零位偏差,以便在轨控中对使用加速度计数据计算的卫星速度增量进行补偿。二是利用定轨数据对加速度计的刻度系数进行标定。每次变轨结束后,依据地面测、定轨后给出的变轨过程中的速度增量δV和变轨过程中利用加速度计累计的速度增量,计算加速度计脉冲当量标定系数,在下一次变轨策略计算中对卫星变轨速度增量进行补偿,以提高轨控精度。
卫星入轨后,发动机推力会随着推进剂贮箱温度和压力等参数的变化呈现出不同的特性。若采用同样的推力进行轨控策略的计算,势必会带来较大的计算误差,影响变轨精度。所以在每次变轨后对推力器的推力标定是高精度变轨必不可少的步骤。目前国内外均有许多种推力标定的方法。嫦娥一号卫星主要根据加速度计数据对发动机推力进行标定,同时根据卫星贮箱压力温度等参数进行适当修正。
5 星上自主变轨控制的设计
为了解决深空探测中卫星的变轨问题,保证准确、及时、可靠地完成卫星的变轨控制,在嫦娥一号卫星的变轨控制中,采用了一种星上自主地进行的姿态确定、姿态机动以及自主变轨的变轨程序。
5.1 变轨控制飞行程序
月球探测卫星大部分轨道控制利用490N大推力发动机完成,少量中途轨道修正以及环月运行后轨道维持控制采用l0N小推力发动机进行。根据每种发动机使用特点,制定了490N变轨准备子程序,变轨控制程序,l0N变轨准备、变轨控制以及l0N轨道维持子程序。保证各种轨道控制准时、可靠。
5.2 与变轨控制有关的工作模式设计
GNC分系统设计了四种工作模式,用于卫星变轨准备和变轨控制:
l)恒星捕获:在卫星建立轨控点火姿态之前,利用敏感器信息预估卫星的惯性姿态并进行卫星姿态控制;
2)惯性调姿:用于建立卫星轨控点火姿态,实现卫星三轴大角度姿态机动;
3)恒星定向:在卫星建立轨控点火姿态之后保证卫星的稳态控制;
4)轨控定向:进行轨控发动机开、关机控制,确定卫星的点火姿态,并进行点火期间的姿态稳定控制。
5.3 预置控制参数的自主变轨控制程序
在卫星建立轨控点火姿态之前,卫星进入恒星捕获模式,对陀螺漂移和加速度计零位偏差进行标定;根据程控指令,卫星自主转入惯性调姿阶段,建立卫星轨控点火姿态;调姿到位后,卫星自主转入轨控前的姿态稳定阶段,利用星敏感器对卫星姿态进行滤波修正;程控时间到,卫星自主进入轨控定向模式,星上自主控制轨控发动机开关机。轨控发动机关机后,卫星稳定一段时间,自主转入太阳定向模式,恢复卫星巡航姿态。
5.4 建立点火姿态的再定向机动
近地轨道卫星的姿态机动多为单轴姿态机动,或是三轴小角度的姿态控制。嫦娥一号卫星在轨道控制前,需要将卫星从对日定向的巡航姿态调整到轨道控制所需的点火姿态。这种姿态调整可能是任意姿态的调整,为此采用四元数方式同时进行三轴姿态机动。控制律设计中在考虑调姿时间有限制这一条件的同时还考虑了根据卫星调姿姿态设置不同调姿角速度的方法,这样既满足时间要求又可适当地减小轴间耦合。
5.5 点火姿态的测定
点火姿态主要通过陀螺数据估计确定。当卫星姿态角速度较大时,在适合星敏感器测量的条件下,自动引入星敏感器信息修正卫星点火姿态。
5.6 轨控发动机的开机和关机控制
轨控开机采取预先注入开机时间的自主程控点火,轨控关机采用速度增量及时间双保险关机的控制方法。当加速度计信号积分值达到预定速度增量数值时,计算机发出关机指令。时间关机控制方法是指当点火时间累计值达到预定点火时长数值时,计算机发出关机指令。这一控制逻辑能够保证,在正常情况下使用速度关机方法,实现高精度变轨;加速度计异常情况下使用时间关机方法,防止错过控制窗口或引发灾难性故障。
5.7 点火姿态的稳定控制
考虑到轨控发动机点火的干扰力矩大,可能激发液体推进剂晃动和太阳帆板挠性振动,设计了基于脉宽调制(PWM)的PID和滤波校正的纯数字化的喷气姿态控制律[2],有效地保证了变轨期间卫星姿态控制精度。同时尽可能地减少了推力器脉冲工作次数。图2给出了稳定控制原理框图。

图2 轨控期间姿态稳定控制原理框图
5.8 关机后巡航姿态的自主恢复
以往静止轨道卫星变轨结束后,均由地面控制卫星进行太阳捕获,建立巡航姿态。嫦娥一号卫星在变轨发动机关机并稳定一段时间后,自主地进入太阳定向模式,利用卫星上安装的太阳敏感器进行太阳捕获和太阳定向控制,自主地恢复巡航姿态。
5.9 自主故障检测、处理和恢复
目前静止轨道卫星的变轨控制多采用地面控制的方式,在变轨过程中若出现姿态控制或推进系统异常情况,由地面进行故障诊断,然后采取措施关闭轨控发动机,中止轨道控制。中低轨道卫星具有一定的自主轨控能力,但在轨控过程中出现姿态异常等现象,仍然能自主退出轨控,待地面排除故障后,再择机进行轨控。这种控制策略,对于轨控窗口有唯一性要求的月球探测卫星却不再适用。
嫦娥一号卫星变轨控制过程中,是由星上自主检测卫星姿态信息,当检测出故障后,紧急关闭变轨发动机,自主地进行故障处置。同时,星上自主控制进入一个过渡模式,待卫星的姿态角速度被适当阻尼后,自主地重新转入轨控准备阶段,重新设置轨控流程。根据重新设定的时间,卫星自主地转入相应的工作阶段,恢复轨控,并根据所需要的控制量完成变轨开、关机。
6 保证变轨精度的其他措施
对于嫦娥一号卫星或其他对轨道要求严格的航天器,必须考虑到姿态控制喷气(含动量轮卸载)构成其轨道运动的摄动力,可能会影响轨道确定精度和变轨控制参数计算精度,最终影响变轨精度。为此,在嫦娥一号卫星GNC系统设计中采用了减少喷气和计量喷气的措施,还研究了多种工作模式下的喷气影响分析和补偿方法。
6.1 巡航姿态的动量轮控制
以往卫星太阳定向模式下多采用喷气姿态控制。非力偶式安装的推力器工作时,不但产生姿态控制力矩,而且产生使卫星质心速度改变的推力,使卫星轨道发生复杂变化。为了减小卫星姿控的喷气量,嫦娥一号卫星的太阳定向巡航姿态采用动量轮控制方式,有效地减少了喷气对轨道的扰动。但是,由于受到环境干扰力矩的作用,会造成动量轮角动量饱和。星上采用三轮零动量工作方式,增加系统存储角动量的能力,减少喷气卸载次数。
6.2 巡航姿态的慢旋方式和停旋控制
卫星在巡航姿态下处于不同的轨道段,所受的干扰力矩不同。调相段主要受重力梯度力矩的影响,地月转移段主要受太阳光压力矩的影响,月球捕获段主要受月球引力的影响。在上述阶段卫星处于惯性定向姿态,干扰力矩引起不同程度的动量积累。在巡航姿态下采用地面控制卫星慢旋与星上自主启旋的方式,使卫星绕对日定向轴(+X轴)慢旋,抵消大部分干扰力矩的影响,减少巡航姿态长期运行中的喷气卸载。在卫星每次变轨前,地面控制卫星停旋在适当相位,以减少卫星惯性调姿控制的喷气量。
6.3 动量轮喷气卸载的计量纳入轨道预报模型
嫦娥一号卫星GNC分系统设计,采用了提供遥测通道将姿态控制推力器的工作时间和工作次数下传到地面,结合姿态敏感器数据可以在地面较为准确地计量每一个遥测周期内喷气推力的大小和方向的方法。根据遥测数据获得喷气加速度在航天器惯性坐标系中的分量,定轨时计算并计入了喷气摄动,以补偿姿控喷气对轨道确定精度的影响。该方法显著地提高了卫星轨道确定的精度,补偿流程如图3所示。

图3 定轨喷气补偿流程图
为了防止动量轮卸载发生在地面不可见(无遥测)弧段,GNC系统设计了强制卸载手段。飞控过程中,安排在地面可见弧段(在飞出测控区之前的一段时间)进行强制卸载,通过地面注入卸载指令,强制动量轮卸载有效地避免了航天器在不可测控弧段喷气卸载。
6.4 变轨前后姿控喷气纳入变轨参数计算模型
由于在巡航姿态下进行变轨前的测、定轨,计算出轨控参数后才进行姿态机动建立点火姿态,而姿态机动采用喷气控制完成,轨控过程中姿态控制和轨控后恢复巡航姿态的姿态机动也会喷气。在变轨参数计算时如果不考虑这些喷气,会对变轨精度产生影响。
根据数学仿真和飞行遥测数据,可以估算不同条件下姿态机动时的喷气摄动,并生成数据表。在轨控参数计算中,根据航天器本体相对于目标姿态的误差四元数查表求得对应的航天器姿态机动产生的速度增量,据此在轨控计算中修正轨控量,从而提高轨控精度,补偿计算流程如图4所示。

图4 轨控参数计算中补偿喷气流程图
7 飞行试验结果
嫦娥一号卫星于2007年l0月24日l8时29分38秒入轨,入轨后的近地点高度为200km,远地点高度为5l000km。入轨后当天就对加速度计进行了标定,标定出了两个加速度计的零位偏差。
7.1 调相轨道阶段
星箭分离后,嫦娥一号卫星进入周期为l5.8小时的超地球同步转移轨道。经过大约l天(绕地球一圈半),于l0月25日l7时55分进行了一次远地点变轨。卫星从对太阳定向的巡航姿态开始,自动进行大角度姿态机动,建立点火姿态;发动机点火关机后,卫星自动恢复巡航姿态;整个过程中地面没有向卫星发出任何遥控指令。以后每次变轨都要重复这一过程。因此,这是对于新设计的变轨控制流程的一次在轨试验,同时也将轨道的近地点高度提高到600km,改善了后续近地点变轨操作时的观测条件。
在远地点变轨后大约l天,即26日l7时33分和29日l7时49分,成功地进行了第一次近地点变轨控制。由于近地点附近地面观测时间短,且易受轨道误差影响,故使用了前述的自动轨道控制流程。整个过程中地面未向卫星发出任何遥控指令。变轨完成后,卫星轨道周期从l5.8小时变为24小时,远地点高度从5l000km变为72000km。
按照卫星飞行程序,在第一次近地点变轨后大约3天,进行了第二次近地点变轨,轨道周期变为48小时,远地点高度升至l20000km,超过了以往中国人造地球卫星所到达过的高度。
卫星继续飞行约2天后,在l0月3l日l7时l5分开始进行了第三次近地点加速。完成变轨后进入了与月球交会的地月转移轨道,这一次轨控特意提前了3分钟,这样就将轨道的近地点幅角减小了0.23°,使得中途修正的速度增量减小了一半。地月转移轨道入口点时刻为l0月3l日l7时25分4.7秒,比设计的地月转移轨道入口时刻仅提前了23.3秒。
7.2 地月转移轨道阶段
由于实现了在发射窗口前沿发射,并且轨道控制精度较高,所以取消了原计划在进入地月转移轨道第l7小时所进行的第一次中途轨道修正,在进入转移轨道后第4l小时进行了一次小的修正,修正量为4.84m/s。这次中途修正之后,根据定轨的结果,卫星到达近月点的高度为211km,轨道倾角为90.l7°,近月点时刻为11月5日11时25分48秒,仅仅比标称轨道晚了20秒到达近月点。因此再一次取消了原计划在到达第一个近月点前24小时进行的第三次中途修正。
卫星在转移轨道上共飞行约114小时,于11月5日11时l5分开始进行第一次近月点制动变轨,11时36分33秒变轨发动机关机,卫星进入周期为l2小时2分的绕月轨道,成为一颗月球卫星。
7.3 近月点制动轨道阶段
第一次近月点制动后的环月轨道周期为l2小时l45秒。在11月6日11时2l分开始进行第二次近月点制动,制动后的环月轨道周期为3.5小时l04秒。在11月7日8时24分开始进行第三次近月点制动,制动后将卫星的远月点高度降低到l87.66km,成为了近月点,原来的近月点成为了远月点,高度为2l3.2km,满足高度200km±25km、倾角90°±5°的要求。至此嫦娥一号卫星进入了预定工作轨道。
8 结 论
嫦娥一号卫星GNC分系统的高可靠、高精度自主变轨控制,保证了卫星从绕地球运行轨道顺利转移到预定的绕月球运行轨道,为中国首次月球探测工程的圆满成功作出了重要贡献。本文从变轨参数优化和参数标定、星上自动变轨控制和系统设计保障措施等方面详细描述了嫦娥一号卫星地月转移阶段的变轨控制过程以及高精度的变轨控制方法,同时给出了在轨飞行试验的验证结果,可供后续深空探测系列卫星的轨道控制系统设计参考。
[l]宗红,李铁寿,王大轶.月球卫星GNC系统方案设想[J].航天控制,2005,23(l):2~6
[2]王寨,李铁寿,王大轶.探月卫星变轨时的姿态控制研究[J].航天控制,2005,23(l):11~l4
Orbit Maneuver Contro1during Cis1unar-Transfer Phase for CE-1 Spacecraft
ZONG Hong,WANG Shuyi,HAN Dong,WANG Dayi,LI Tieshou,ZHANG Honghua,HUANG Jiangchuan
(Beijing Institute of Control Engineering,Beijing 100080,China)
A highly reliable and accurate on-board control system design scheme is presented for the orbit maneuvers of CE-l spacecraft during it scislunar transfer phase.Flight trajectories,orbit transfer strategies and parameter optimization,on-board autonomous maneuver control procedures and parameter caliberations are addressed.Flight verification results are given as well.
CE-l spacecraft;cislunar transfer;orbit control;autonomous orbitmaneuver

V446.l;V448.22
A
l674-l579(2008)0l-0044-07
2007-l2-11
宗红(l97l-),女,北京人,高级工程师,主要从事飞行器制导导航控制的研究工作(e-mail:zongh@bice.org.cn)。
