嫦娥一号卫星紫外月球敏感器
2008-12-12黄欣,王立,卢欣
黄 欣,王 立,卢 欣
(北京控制工程研究所,北京l00080)
嫦娥一号卫星紫外月球敏感器
黄 欣,王 立,卢 欣
(北京控制工程研究所,北京l00080)
探月工程是我国航天领域的又一项重大工程项目,嫦娥一号卫星是探月工程的第一步。嫦娥一号卫星首次采用了一种全新的光学姿态敏感器——紫外月球敏感器,实现在卫星环月飞行期间的姿态测量任务。紫外月球敏感器是一种以月球为姿态参考源的大视场成像式光学姿态敏感器,本文介绍其工作原理、功能与组成以及在轨飞行试验的相关情况。
紫外月球敏感器;嫦娥一号卫星;姿态测量
1 引 言
探月工程是继载人航天工程之后我国航天领域又一重大项目。嫦娥一号卫星是这项重大工程的第一步。以往我国发射的卫星,都是环绕地球飞行的,而嫦娥一号卫星除了要完成从地球到月球的奔月之旅,更多的时间要环绕月球轨道飞行。由于飞行任务的特殊性,要求嫦娥卫星具有某些不同于以往卫星的新功能。为实现这些新功能,保证飞行任务顺利完成,对一些关键技术进行了重点攻关,其中之一就是紫外月球敏感器。
2 测量原理
嫦娥一号卫星携带多种科学探测仪器执行月球科学探测任务。为最大限度地发挥各种科学仪器的功效,就必须很好地控制卫星在绕月飞行时的姿态。卫星平台需要实时测量俯仰和滚动方向的姿态偏差并及时加以修正,以确保探测仪器始终处于最佳工作状态。
对于地球卫星来说,测量俯仰和滚动姿态角的任务通常是由红外地球敏感器完成。地球大气在l4~l6μm波长范围内的红外辐射十分稳定,无论昼夜以及气象条件如何,地球大气的红外辐射带始终呈现为一个完整、稳定的圆盘。因此利用扫描的方法探测地球大气红外辐射带内外热辐射值的陡变,可以获得地球地平信息,经过进一步的技术处理可得到地心垂线方向,即可计算出俯仰方向或滚动方向的姿态偏角,如图l-a所示[l]。
月球的情况则截然不同。一方面,月球上没有大气层,不具有类似地球大气那样稳定的红外辐射带;另一方面,随阳光照射角及观察方向的不同,月球会呈现圆缺不同的月相。由于在近月空间可探测的月球辐射区并不呈现一个完整的圆盘,若用扫描式敏感器扫描月面可能出现以下两种不利情况:第一种,扫描线完全经过月影区,由于辐射太弱,这时候仪器不能测量出姿态;第二种,扫描线既扫到了月影区,也扫到了月面阳照区。当扫描线经过其间的晨昏分界线时,由于这里辐射强度存在陡变,难以与月面边缘的辐射陡变相区分,因此仪器有可能输出错误姿态角。如图l-b、c所示。这两种情况都不是飞行任务所能忍受的,因此在探月卫星上不宜使用基于扫描方案的月球敏感器。
可行的解决方案是设计一种成像式光学敏感器,在获取测量对象的影像之后,通过图像处理技术,可准确检测出月面真实边缘并有效剔除晨昏分界线的影响,最终实现姿态测量目标。
在此思想下研制了紫外月球敏感器,其工作原理是:首先由敏感器拍摄一幅月球图像,然后由敏感器内部的算法软件提取月球圆盘边缘信息,再利用在明亮月球圆盘和黑暗太空背景之间的亮度反差,检测出月球圆盘的真实边缘,并与晨昏分界线相区分;接着逐一为各边缘点建立对应空间矢量;最后根据这些空间矢量集合,拟合出月心矢量在敏感器测量坐标系中的坐标,进而求解出俯仰角和滚动角。
3 姿态测量方案的实现
3.1 紫外月球敏感器的功能与组成
为完成姿态测量任务,紫外月球敏感器需具备两项主要功能:图像获取和图像处理。这两项功能分别由紫外月球敏感器头部(简称UVSH)与紫外月球敏感器线路(UVSE)完成。
UVSH负责拍摄图像并将视频信号传送到UVSE。UVSH主要由光机结构与电子线路两大部分组成。光机结构部分包括紫外物镜、平面反射镜组件、反射镜支架、电控箱箱体和调焦组件等。电子线路由CCD时序电路、驱动电路、视频处理电路、接口电路与二次电源等组成。
UVSE具有月球图像处理及姿态计算、UVSH参数控制、与控制计算机(GNCC)进行数据交换以及向数传通道传送图像数据等功能。UVSE主要包含了图像采集电路、DSP处理器电路、接口电路、二次电源和机箱。UVSH与UVSE的功能组成如图2所示。

图l 扫描方案的比较

图2 紫外月球敏感器功能组成示意图
3.2 紫外月球敏感器的技术设计
3.2.l 光学系统
嫦娥一号卫星轨道高度为200km,此时月球圆盘的视张角为l27.48°。由于紫外月球敏感器是成像式敏感器而非扫描系统,所以如对整个月球圆盘成像则其光学系统的视场角应大于月球视张角。要实现如此大的视场角,同时又要保证良好的成像质量,光学设计和加工的难度都非常大。

图3 紫外月球敏感器视场分布与所成图像
考虑到仅月球边缘部分对姿态测量任务有贡献,而月球中心区没有贡献,故紫外月球敏感器的光学系统采用组合式系统:在紫外物镜的物方光路中加入平面反射镜组,对敏感器物方视场进行分割和偏移。在平面反射镜组件的作用下,紫外月球敏感器的方形视场被分解为8个互不重叠的子视场投射到月球圆盘边缘附近区域,如图3所示。通过采取这一措施,使视场为70°的紫外物镜可以实现对l l0°~l50°空间范围的探测。
3.2.2 高速大容量的数据处理器
由于必须实时处理大量图像信息并完成高精度快速浮点运算,因此选择高速数字信号处理器DSP作为图像数据处理CPU。这种处理器的最大指令执行速度为l6MIPS,最大浮点处理速度为32MFLOPS,最高浮点运算精度为40bit。它在满足型号降额要求的同时,还为软件算法提供了高速高精度的硬件平台。
由于紫外月球敏感器软件复杂,装订参数多,需处理的数据量大,设计中采用了大容量存储器结构,可以满足处理紫外图像的特殊需求。研制中解决了在一块电路板上DSP外围配置大量存储器芯片带来的总线隔离驱动问题,有效地减小了印制板尺寸,并降低了电路功耗。
设计中采用了DSP与RS422总线和l553B总线的标准接口,使用FPGA小型化技术,使得软件编程更为简便。
3.2.3 算法及软件
由于光学系统组合视场的特殊性、月球成像目标阴晴圆缺的特点和处理算法鲁棒性要求等因素,使得紫外月球敏感器数据处理算法面临很多难点。
l)紫外敏感器图像整合技术
紫外月球敏感器的环形视场由空间上互不相连的8个子视场组成,因此呈现在CCD上的月像边缘信息表现为8条独立的双曲线线段。必须对这些曲线信息进行有效地整合,才能保证敏感器测量精度。为解决图像整合问题,研究出了图像整合方法,将原来8个子月像转化为一个完整月像,在此基础上进行姿态与视半径确定,从而大幅度地提高了姿态测量精度。
2)月像边缘的快速检测算法
紫外月球敏感器需要处理的图像尺寸为l024×l024,图像数据量达到l M字节。若采用传统的边缘提取算法检测月像边缘信息,则运算量巨大,处理时间长,使姿态数据更新率不能满足任务要求。为提高月像边缘的检测速度,开发了一种新的边缘点快速提取算法,在保证姿态确定精度的前提下,提高了数据更新率。
3)晨昏分界线鉴别算法
由于月相的变化,在绝大多数时间内紫外敏感器所拍摄的月球图像边缘包括了两个部分:月球圆盘的真实边缘与晨昏分界线。若把晨昏分界线也作为月球边缘点进行月心矢量的拟合,必将带来很大的姿态确定误差,所以紫外敏感器信息处理软件必须具备将晨昏分界线剔除的功能。为解决这一问题,建立了晨昏分界线与月球边缘的信息模型并提出了剔除算法,在轨验证非常有效。
4)姿态数据可用性判别方法
紫外月球敏感器的测量精度受成像质量、干扰光强度、月面地形、观测月相等因素的制约,这些因素对姿态的可信度及精度均有影响。为保证GNC系统能使用有效且精确的姿态信息,采用以品质因数的形式表征当前姿态数据的精确程度与可信度的方法。这个措施为GNC系统正确使用紫外月球敏感器姿态数据提供了有效判据。
5)积分时间自主调节方法
受月面地形起伏、月面物质特性、太阳仰角变化等因素的影响,紫外月球敏感器所探测到的月面亮度通常变化很大。为提高敏感器对探测目标的适应性,在软件中设置了自主调节光积分时间的功能。采用了随不同地表与光照条件的积分自主调节方法实现高质量成像。
6)干扰光判别方法
在卫星环月飞行期间,太阳、地球均有可能进入紫外月球敏感器视场并形成干扰。因此有效地鉴别外部干扰光是紫外月球敏感器进行有效姿态测量的重要前提。由于紫外月球敏感器属于成像式敏感器,视场内目标具有丰富的信息,因此软件中采用了图像分析的方法来监视干扰光源是否出现。在地面及飞行试验中都验证了该判别算法的有效性。
3.2.4 CCD电路设计
受月面反射率、月面地形和太阳仰角的影响,紫外月球敏感器所观测到的月面亮度变化范围很大。这就要求敏感器能够通过调整CCD的光积分时间将输出的图像灰度控制在一定范围内,以保证图像处理软件能够正常工作。根据分析,CCD光积分时间的可调范围应为5~600ms。
紫外月球敏感器的成像器件采用的是E2V公司的CCD器件。这种器件没有电子快门功能,光积分时间控制范围也很有限。按照器件手册提供的标准工作方式,CCD最小等效光积分时间约为80ms,远远超出最小光积分时间5ms的要求。
为解决光积分时间调整的难题,对E2V公司提供的标准时序进行了改进,加入了“势阱深度动态控制”、“多余电荷导出”和“电荷倾倒”等手段,将最小等效光积分时间控制到5ms以内,从而满足了紫外月球敏感器工作需要。
3.2.5 敏感器的标定与测试
同其他光学姿态敏感器一样,紫外月球敏感器在制造过程中不可避免地存在一定的系统误差。在敏感器交付前,需要对这些系统误差进行修正,以提高敏感器姿态测量精度。系统误差的修正是通过敏感器标定实现的。
通常,光学系统视场越大其标定的误差也越大。紫外月球敏感器视场角达到l50°,要在如此大的测量范围内保证标定精度,并且满足标定函数形式简单和运算速度快的要求,其难度极大。在紫外月球敏感器的标定试验中,利用转台和平行光管进行测试,采用待定系数法构造误差校正模型,并根据最优理论进行参数估计,最终获得像点平面坐标与入射光矢量坐标之间的对应函数。经实测,紫外月球敏感器的像元标定精度优于30″。
为配合紫外月球敏感器的地面测试,研制了大型月球模拟器、精密三轴转台、小型月球模拟器和数据采集装置等设备,构成了紫外月球敏感器的地面测试系统。依托这套测试系统,完成了紫外敏感器单机在各种月相下的精度测试、处理时间测试、通信功能测试和图像传输等一系列测试,以及紫外敏感器在GNC分系统和整星中的综合测试。
4 飞行试验
2007年l0月24日l8时05分,嫦娥一号卫星从西昌卫星发射中心成功发射。在经历了调相轨道飞行、地月转移轨道飞行后,于11月7日成功地完成了第三次近月制动,顺利进入了轨道高度为200km的环月轨道。
在卫星由太阳定向模式转入“星光环月”模式后,11月8日下午星上的两台紫外月球敏感器先后加电工作。之后对紫外月球敏感器进行了为期三天的在轨测试。遥测数据显示,敏感器各项功能正常,工作状态稳定。
11月27日起,连续进行了多次“紫外环月”飞行试验。在此模式下,紫外月球敏感器输出的姿态数据被GNC分系统引入参与整星闭环姿态控制。图4~7显示在紫外环月期间紫外月球敏感器输出的姿态角。

图4 2007年11月27日2l:27至23:59紫外月球敏感器的输出姿态角
从图5中可以看到,在某些时间段内两台紫外月球敏感器的输出角都出现了幅度超过±l°的异常波动。经分析,此时太阳已进入敏感器外部挡光环的抑光锥以内,阳光及局部舱壁反照光对敏感器的姿态测量造成了严重干扰。

图5 2007年11月28日0:00至7:59紫外月球敏感器的输出姿态
根据遥测的数据引入标志,剔除了其中部分未被GNC采用的无效数据,这时敏感器输出的姿态角如图6所示。显然,姿态数据的精度和稳定度有了明显改善。由此说明,敏感器准确地检测到了外部干扰,并有效防止了不可信的姿态信息被控制系统使用。
在紫外环月飞行期间,嫦娥一号卫星姿态平稳。统计处的紫外环月模式下卫星姿态角速度误差和姿态角误差分别如表l~2所示。

表1 紫外环月模式下卫星姿态角速度误差

表2 紫外环月模式姿态角误差
除执行姿态测量任务外,紫外月球敏感器还具有图像拍摄和传输功能。图8为11月26日、28日和29日由紫外月球敏感器拍摄到的6幅月球影像。
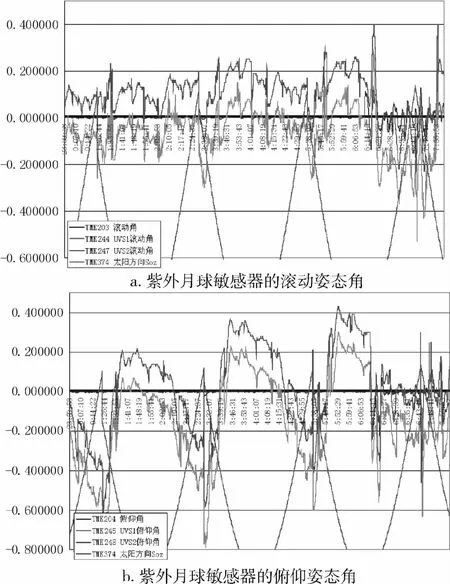
图6 数据引入标志有效时紫外月球敏感器的输出姿态角

图7 2007年l2月l日l:49至6:58紫外月球敏感器的输出姿态角

图8 紫外月球敏感器所拍摄月球影像
5 结束语
紫外月球敏感器是嫦娥一号卫星重点攻关项目之一,同时也是我国第一个以月球为观测目标的光学姿态敏感器,第一个大视场成像式敏感器,第一个工作在紫外谱段的光学敏感器。紫外月球敏感器在国际上也属于首创。
嫦娥一号卫星环月飞行期间的遥测数据显示紫外月球敏感器在轨工作正常,实现了预期的功能和性能。
紫外月球敏感器的成功研制和应用,实现了我国航天控制技术领域的又一重大突破。
[l]屠善澄.卫星姿态动力学与控制[M].北京:宇航出版社,l998
An U1travio1et Lunar Sensor for CE-1 Spacecraft
HUANG Xin,WANG Li,LU Xin
(Beijing Institute of Control Engineering,Beijing 100080,China)
CE-l,a lunar orbiting spacecraft,is part of the first phase of the chinese lunar exploration program.A novel optical sensor,ultraviolet(UV)lunar sensor,is employed in the CE-l satellite.The UV lunar sensor is a wide-field of view(FOV)optical sensor which operates in the orbit around moon and provides the GNC subsystem with the pitch and roll information.This paper introduces the information of the UV sensor,including the principle,functions and the results of flight tests.
ultraviolet lunar sensor;CE-l spacecraft;attitude determination

TN379
A
l674-l579(2008)0l-005l-05
2007-l2-09
黄欣(l97l-),男,北京人,高级工程师,研究方向为星敏感器及紫外敏感器(e-mail:huangx@bice.org.cn)。
