嫦娥一号卫星的制导、导航与控制
2008-12-12黄江川张洪华李铁寿
黄江川,张洪华,李铁寿,宗 红
(北京控制工程研究所,北京l00080)
嫦娥一号卫星的制导、导航与控制
黄江川,张洪华,李铁寿,宗 红
(北京控制工程研究所,北京l00080)
嫦娥一号卫星是中国首颗月球卫星。卫星制导、导航与控制(GNC)任务复杂多变,对系统实时性、可靠性和精度要求较高。文章介绍嫦娥一号卫星GNC系统组成、控制方法、系统特点和典型飞行结果。
嫦娥一号卫星;制导导航与控制;月球;系统
1 引 言
中国第一颗大型月球探测航天器嫦娥一号卫星于2007年l0月24日成功发射。2007年l0月3l日,嫦娥一号卫星在预定时间和预定地点进入预定的地月转移轨道,2007年11月5日,嫦娥一号卫星在近月点进入预定的绕月轨道,2007年11月7~l8日,嫦娥一号成功完成对月定向和三体指向控制在轨测试。
嫦娥一号卫星GNC系统完成了许多复杂任务。在调相轨道,GNC系统执行一系列姿态机动和轨道控制,使卫星在适当时间转入地月转移轨道。在地月转移轨道,GNC系统保证卫星对太阳定向,并执行几次轨道中途修正,使卫星捕获预定环月轨道起始点。在月球轨道捕获阶段,GNC系统执行几次轨控发动机点火,使卫星捕获月球轨道并进入标称环月轨道。在环月轨道,GNC系统使卫星本体对月球定向、太阳帆板对太阳定向、定向天线对地球定向。
本文概要介绍嫦娥一号卫星GNC系统组成、控制方法、系统特点和典型飞行结果。
2 卫星运动模型与控制目标
嫦娥一号卫星是带有挠性太阳帆板、大型充液贮箱和中心刚体的复杂运动体,卫星运动包括刚体平动与转动、挠性振动、液体晃动等。
引入坐标系:“Oi”代表惯性坐标系,“Ob”代表卫星本体坐标系,“Od”代表卫星目标坐标系。设从“Ob”系旋转到“Od”系的欧拉轴单位矢量为=[klk2k3]T,欧拉角为φ,则“Od”系相对于“Ob”系的姿态可用单位四元数表示:

记“Ob”系相对于“Oi”系的旋转角速度为ωs,“Od”系相对于“Oi”系的旋转角速度为ωd,则“Od”系相对于“Ob”系的角速度为Δω=ωd-ωs。卫星目标系相对本体系运动学可以表示为:

卫星动力学模型可以简写如下[l,2]:

式中 X是卫星平动位置列阵,ωs是卫星本体角速度列阵,ω~s是角速度列阵的反对称阵,M是卫星质量阵,Is是卫星惯量阵,Ps是作用在卫星上外力列阵,Ts是作用在卫星上力矩列阵,ω1a、ωra分别是左、右太阳帆板角速度列阵,ω1、ωr分别是左、右太阳帆板模态频率对角阵,η1、ηr分别是左、右太阳帆板模态坐标阵,ζ1、ζr分别是左、右太阳帆板模态阻尼系数阵,I1a、Ira分别是左、右太阳帆板惯量阵,Ft1、Ftr分别是左、右太阳帆板振动对本体平动的柔性耦合系数阵,Fs1、Fsr分别是左、右太阳帆板振动对本体转动的柔性耦合系数阵,F1a、Fra分别是左、右太阳帆板振动对自身转动的柔性耦合系数阵,R1as、Rras分别是左、右太阳帆板转动与卫星转动的刚性耦合系数阵,T1a、Tra分别是左、右太阳帆板上的控制力矩列阵。式(2)描述了卫星平动动力学,式(3)描述了卫星转动动力学,式(4)描述了卫星帆板转动动力学,式(5)描述了卫星挠性振动动力学。
卫星姿态控制目标就是使得本体系相对惯性系姿态与目标系相对惯性系姿态一致。姿态控制的目标姿态在不同阶段有不同取法。在巡航姿态,卫星Xs轴对太阳定向并可以设定偏置俯仰角和角速度绕太阳矢量方向旋转,此时目标坐标系Xd轴取为指向太阳方向;在轨控阶段,卫星目标坐标系取为轨控点火目标姿态;在环月阶段,目标坐标系取为环月轨道坐标系。姿态控制目标可以简述为,根据卫星运动学和动力学构造控制力矩使得“Ob”系跟踪“Od”系并抑制挠性振动。
卫星轨道控制目标描述如下:根据卫星运动学和动力学构造控制力使得卫星在预定时间和预定地点获得预定速度增量,实现轨道控制。
3 系统组成与控制方法
3.1 系统组成
嫦娥一号卫星GNC系统的敏感器包括太阳敏感器、星敏感器、紫外月球敏感器、速率积分陀螺和加速度计;执行机构包括飞轮装置、推力器、帆板驱动装置、天线驱动装置和轨控发动机;控制器包括控制计算机、应急计算机、配电器和二次电源。GNC系统的软件包括控制计算机系统软件、应用软件,应急软件和部件LTU软件。LTU通过内部总线与控制计算机相连,构成计算机控制网络。控制系统的这种分布式体系结构保证GNC分系统高效、可靠、实时实现嫦娥一号卫星的控制功能和性能。
3.2 巡航期间的姿态控制
在卫星环月运行之前,除了轨控阶段,卫星运行于巡航姿态。姿态确定是利用太阳敏感器的输出给出太阳矢量方向在卫星本体系的表示,然后根据太阳敏感器的安装矩阵计算卫星偏航角和俯仰角。巡航姿态角速度的确定是利用速率积分陀螺的输出,然后根据陀螺的安装矩阵计算卫星三轴姿态角速度。巡航姿态的控制分为太阳捕获和太阳定向两个阶段:在太阳捕获阶段,根据0-l式太阳敏感器输出,利用相平面控制算法,通过推力器点火驱使卫星旋转使太阳矢量进入数字太阳敏感器视场;在太阳定向阶段,通过数字太阳输出和陀螺输出外推,根据系统动力学,利用相平面控制算法和PID控制算法,通过推力器点火和飞轮转动保证卫星Xs轴指向太阳。
巡航姿态控制的特点是卫星既可以绕Xs轴慢旋,也可以使Xs轴绕俯仰轴偏置并绕太阳矢量慢旋。这种运动状态一方面可满足卫星总体测控需求,另一方面可有效避免推力器喷气对卫星轨道的影响。
巡航姿态控制在轨飞行结果见图l、图2。图中描述了从太阳捕获到太阳定向过程中星体对太阳指向的变化和三轴角速度的变化。由图可见:卫星准确捕获太阳并以高精度和高稳定度跟踪太阳。
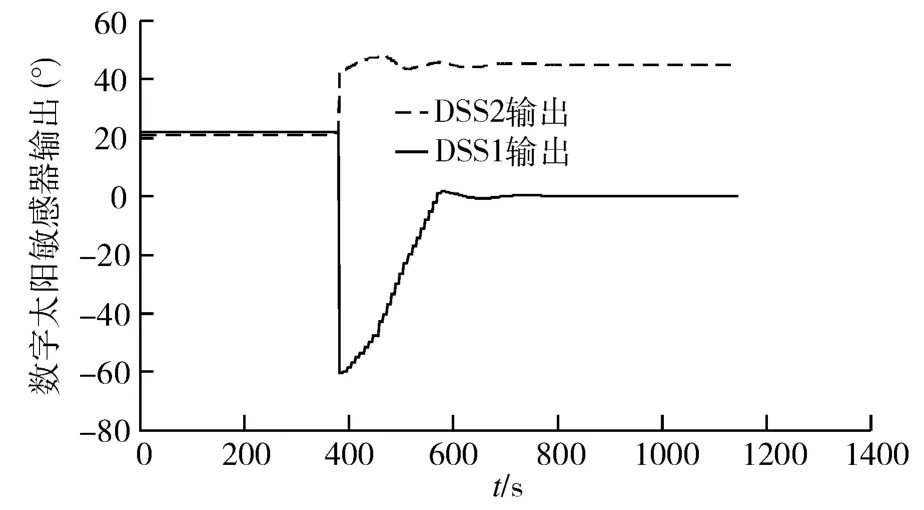
图l 巡航姿态控制期间数字太阳敏感器(DSS)的输出曲线

图2 巡航姿态控制期间三轴角速度曲线
3.3 轨道控制
奔月轨道的特点是预先设定地月转移标称轨道。实际轨道与标称轨道的初始微小偏差经5天的飞行放大,可能导致卫星撞月或离月。因此,变轨的高精度控制成为一大技术难点。而要实现变轨的高精度控制就要面对复杂的卫星对象。正如上节动力学描述,严格意义上讲,嫦娥一号卫星刚体平动与转动、挠性振动和液体晃动互相耦合,在快速机动过程又有三轴非线性耦合影响,控制系统稍有疏忽就可能引发多种运动与控制系统相互作用从而导致系统不稳定。
要保证轨控精度,卫星从太阳定向姿态就必须实施姿态快速机动转到轨控定向姿态,其中凸现三轴耦合的非线性问题;在490N发动机点火期间,轨控定向要高精度维持预定惯性指向,其中凸现推力偏斜干扰、挠性振动和液体晃动的抑制问题;490N发动机必须在预定时间点开机并且在预定速度增量点关机,其中凸现点火时间精准问题。这些问题涉及一系列复杂的姿态机动控制、姿态维持控制和变轨制导控制,与此同时强调及时(实时性)、准确(高精度)和可靠(可靠性)。
为此,GNC系统创造性地设计了星上网络控制系统,提出了在线规划调度和新型控制方法,高标准实现了变轨控制过程中的姿态控制和轨道控制。其中:卫星姿态确定利用了星敏感器与陀螺联合定姿算法;卫星姿态机动利用了基于四元数的高品质相平面控制算法;卫星姿态维持利用了基于四元数的“PID+滤波器”算法以及数字化脉宽调制算法;卫星导航利用了高精度加速度计;卫星制导利用了高精度、高可靠关机策略。为保证系统可靠性,还创造性设计了自主故障诊断和系统重构以及自主变轨恢复方案。
变轨控制期间第三次近地点加速的在轨飞行结果见图3、图4。由图表明,卫星在预定时间完成姿态机动和姿态保持,进而在预定时间进入轨控点火阶段并保持轨控定向姿态。在轨数据显示轨控精准,因此,原先拟定的三次中途修正减少到一次,大大节省了宝贵的推进剂,为后续新的任务实施提供了良好条件。

图3 变轨控制期间的三轴姿态角误差
3.4 环月期间的卫星控制
在环月期间,日、地、月相对于卫星的运动关系变化复杂,卫星控制面临诸多技术挑战。卫星本体对月定向,其技术难点是卫星轨道的实时计算和怎样利用对月定姿敏感器;太阳帆板跟踪太阳,其技术难点是太阳相对卫星轨道面以年为周期变化,不能照搬地球卫星太阳同步轨道帆板跟踪太阳方法;定向天线跟踪地球,其难点是地球轨道的实时计算和双轴驱动的控制方法。

图4 变轨控制期间的三轴姿态角速度
为此,在环月期间,姿态确定利用了星敏感器结合星上轨道外推以及紫外月球敏感器结合太阳敏感器综合定姿两套方案;本体对月定向姿态控制利用了基于相平面的喷气控制结合基于PID算法的飞轮控制方法;太阳帆板对日定向和定向天线对地定向,则利用“两次垂直转动可以保证第三轴指向任意方向的基本原理”;在此基础上,姿态控制系统根据创造的实用算法,并基于帆板驱动装置和双轴天线驱动装置,实现了定向控制目的。这些方法使得卫星三体指向同时定向成为可能。
环月期间卫星控制的在轨飞行结果见图3~图8。由图可以看出,卫星本体高精度、高稳定度对月定向,帆板对日定向,定向天线对地定向。
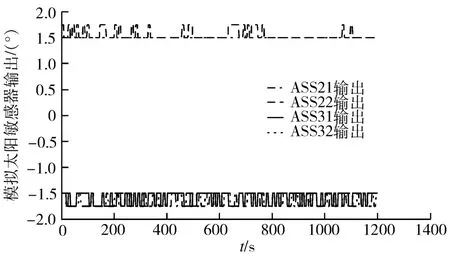
图5 环月控制期间卫星帆板上的模拟太阳敏感器(ASS)输出曲线
4 结 论
嫦娥一号卫星GNC系统任务复杂多变,它对系统实时性、可靠性和精度要求较高。本文概要介绍了“嫦娥一号”卫星GNC系统组成、控制方法、系统特点和典型飞行结果。“嫦娥一号”卫星GNC系统创造了几个第一:第一个高精度变轨控制系统,能够在国内第一次按地面指令时序自主完成复杂的490N发动机变轨控制;第一个三体定向控制系统,能够实时、高精度实现帆板跟踪太阳、定向天线跟踪地球、卫星本体有载荷一面跟踪月球;第一个飞控仿真与支持系统;第一次实现奔月轨道及其控制的高精度仿真;第一个月球紫外敏感器;第一个双轴天线驱动装置;第一个成功使用高精度加速度计于变轨控制中。
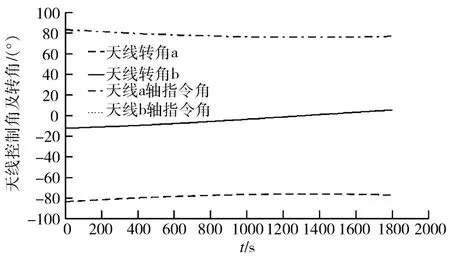
图6 环月期间卫星控制的天线指令角和实际转角曲线

图7 环月期间卫星控制的三轴姿态角偏差曲线

图8 环月期间卫星控制的三轴姿态角速度曲线
[l]John W,Kenneth K D.The attitude control problem[J].IEEE Transactions on Automatic Control,l99l,36(l0):l l48~l l62
[2]屠善澄.卫星姿态动力学与控制[M].北京:宇航出版社,l998
The Guidance,Navigation and Contro1 for CE-1 Spacecraft
HUANG Jiangchuan,ZHANG Honghua,LI Tieshou,ZONG Hong
(Beijing Institute of Control Engineering,Beijing 100080,China)
CE-l spacecraft is the first of a series of Chinese missions to themoon.The tasks performed by the guidance,navigation and control(GNC)system are very complex due to the requirements for real time control,high realiability,and high accuracy.This paper describes the configuration,control methods,features,and flight results of the GNC system.
CE-l spacecraft;guidance,navigation and control;moon;system

TJ765
A
l674-l579(2008)0l-0029-04
2007-l2-08
黄江川(l96l-),男,黑龙江人,研究员,研究方向为航天器制导导航与控制系统设计与实现(e-mail:hjingchuan@l26.com)。
