多策略改进SSA算法优化下电梯起重机械节能多目标平衡控制
2025-02-20汪保良徐柏程李伟杰




摘 要:为了提升电梯起重机械控制的适应性,确保节能效果和客户舒适度,本文提出多策略改进SSA算法优化下电梯起重机节能多目标平衡控制方法。综合考虑在电梯的启动、停止、匀速不同运行状态和相应载荷变化下电梯起重机械能耗和乘客舒适度之间的平衡,构建电梯起重机械节能控制模型和约束条件,以确保在不同运行模式下节能的同时,也能为乘客提供便捷的乘坐体验。采用多策略改进的麻雀搜索算法,通过Sine混沌映射优化初始种群,结合边界学习策略更新发现者位置,求解最优节能控制策略。实验结果表明,所提方法改进的算法求解过程均匀分布,易跳出局部极值,可以在不同运行模式、载荷变化下降低能耗,节省乘坐时间,提升乘客舒适度。
关键词:多策略,麻雀搜索算法,电梯起重机械,节能控制,舒适度,边界学习策略
DOI编码:10.3969/j.issn.1002-59442025.04.031
0 引 言
在节能减排环境下,在高层建筑中能耗占比较大的电梯作为垂直交通的重要工具,其能耗问题日益受到人们的关注[1]。电梯起重机械作为电梯系统的核心部分,其能耗直接关系到整个电梯系统的能源利用效率[2]。因此,研究电梯起重机械的节能控制方法具有重要意义[3]。
当前,电梯起重机械的节能控制方法已成为研究热点之一。众多学者和工程师致力于开发新的控制策略和技术手段,以优化电梯起重机械的运行过程[4],减少不必要的能量消耗。例如,彭云建等[5]以最少乘客平均候梯时间为优化目标,并结合电梯系统的服务时间与能耗等指标,建立电梯系统优化调度模型,达到降低能耗的目的。依据等间隔运行模式思想,设计候梯等间隔派梯规则,实现电梯群组的动态调度节能。该方法的节能控制假设电梯以固定的时间间隔运行,但在实际应用中,特别是高峰时段、低峰时段,难以同时满足节能目标和乘客舒适度目标,导致在节能控制时无法降低乘坐时间,影响乘客的舒适度。刘宇等[6]通过考虑调度环境、电梯行为和调度目标,在训练过程中不断学习并优化调度策略,以适应不同调度环境下的电梯行为变化,完成电梯节能控制。该方法使用的强化学习A3C算法需要高质量的数据来进行训练和学习。如果训练数据的潜在解集合存在分布不均匀的问题时,该算法对最优解的求解效果不佳,影响方法的节能控制效果。Lee等[7]通过捕捉乘客的手势或身体动作来识别其意图,进而控制电梯的运行。通过引入加权K-最近邻算法,实现电梯节能控制。在高峰时段,电梯的运行模式和乘客需求模式会发生变化,乘客的进出频率和目的地分布也会有所不同。然而,该方法使用的加权K-最近邻算法主要依赖于历史数据进行模式识别,对于实时变化的运行模式则无法迅速适应,从而导致节能效果不佳。顾玲丽等[8]通过引入强化学习机制,使蚁群算法在搜索过程中能够不断学习和调整策略,以适应不同高层住宅电梯群的实际运行需求。将用户体验和能耗作为优化目标,构建电梯调度问题的数学模型,并利用蚁群算法的并行搜索能力和全局优化特性求解该模型,寻找最优的电梯调度方案,降低电梯能耗。该方法使用的强化蚁群算法无法全面地搜索解空间,在迭代和试错容易陷入局部最优解,影响电梯起重机械节能控制模型求解效果,导致电梯起重机械能耗较大。
为了解决上述研究方法的不足,提升电梯起重机械节能效果和乘客舒适度,研究基于多策略改进麻雀搜索算法的电梯起重机械节能控制方法。综合考虑在电梯的启动、停止、匀速不同运行状态和相应载荷变化下电梯起重机械能耗和乘客舒适度之间的平衡,构建电梯起重机械节能控制模型和约束条件,以确保在不同运行模式下实现节能的同时,也能为乘客提供便捷的乘坐体验。利用多策略改进麻雀搜索算法,增强控制模型的全局搜索能力,解决陷入局部最优解的问题,优化电梯起重机械节能控制效果。
1 电梯起重机械节能控制
1.1 电梯起重机械节能控制模型构建
电梯启动和停止时,电梯的起重机械需要消耗能量来克服静止或运动状态的惯性,使电梯能够平稳地开始运行或停下来。在电梯匀速运行时,为了维持电梯稳定的运动状态,电梯的起重机械同样需要消耗一定的能量。电梯起重机械节能控制需要在电梯的启动、停止、匀速不同运行状态转换和相应载荷变化下灵活自适应调整起重机械能量,降低起重机械消耗能量。为此,需要节能控制的电梯起重机械的能耗主要包含两部分,分别是控制电梯启动和停止耗能Ga,以及控制电梯匀速运行耗能Gb。其中,Ga为电梯起重机械从静止状态进入运行状态,以及电梯到达目的地起重机械准备结束运行状态的能耗[9-10],即加速和减速能耗。Gb为电梯起重机械为了克服轿厢和乘客的重力,以及维持电梯稳定运行所消耗的能量[11]。在匀速阶段,电梯起重机械会以恒定的功率运行,确保电梯在楼层之间平稳移动。令电梯起重机械数量是 ,电梯起重机械的总能耗为:
依据式(4)构建最小能耗的电梯起重机械节能控制目标函数,公式如下:
F=min G(5)
考虑到实际应用中,控制系统为了节能,会降低电梯的运行功率,或者减少同时运行的电梯数量或优化停靠楼层,这可能会导致乘客感觉电梯运行变慢,尤其是在高峰时段或需要快速到达目的地时会增加乘客的等待时间。为此,电梯起重机械节能控制模型需要综合考虑能耗和乘客舒适度之间的平衡,以确保在节能的同时,也能为乘客提供便捷的乘坐体验。为此,基于不同时间段,将乘客乘坐电梯的舒适度作为控制模型的约束条件。
乘客乘坐电梯的舒适度R与电梯等候时间t w、楼梯层间运行时间te、启动与停止时间taλ,以及乘客上下梯时间等存在密切关联。t w为乘客按下电梯按钮到电梯到达并开门的时间。te为电梯从起始楼层到目标楼层所需的时间。较长的tw、te会给乘客带来不便,直接影响乘客乘坐电梯的R。 taλ为电梯从静止状态开始加速到匀速运行所需的时间,以及电梯从匀速运行减速到静止状态所需的时间。 tsλ为乘客进出电梯所需的时间。这个时间虽然较短,但在高峰期或电梯容量有限时,如果上下梯时间过长,可能导致电梯等待时间增加,影响乘客的整体体验,降低乘客乘坐电梯的R 。基于上述舒适度分析,R主要与乘客乘坐时间有关,则R 的计算公式为:
式中: λ为电梯起重机械控制电梯启动与停止的次数;M为电梯运行期间,起重机械控制电梯启动与停止的总次数;A为最大乘载人数; δλ/A为拥挤系数; δλ为经过 λ次启动与停止后的实际乘客数量。
则基于乘客乘坐电梯舒适度的电梯起重机械节能控制模型约束条件,即令消耗时间不高于乘客期望等待时间,具体表述为:
通过结合节能目标函数式(5)与舒适度约束条件式(7),构建电梯起重机械节能控制模型 。为了提升电梯起重机械节能控制的自适应性,获得平滑节能目标和舒适度目标的多目标平衡最优控制方案,需要对控制模型进行多目标优化求解。
1.2 基于多策略改进SSA算法的节能多目标平衡控制优化实现
通过结合节能目标函数式(5)与舒适度约束条件式(7),构建电梯起重机械节能控制模型 。为了提升电梯起重机械节能控制的自适应性,获得平滑节能目标和舒适度目标的多目标平衡最优控制方案,需要对控制模型进行多目标优化求解。
1.2 基于多策略改进SSA算法的节能多目标平衡控制优化实现麻雀搜索算法求解1.1小节构建的电梯起重机械节能控制模型Z ,获得最小能耗和最优舒适度对应的起重机械节能控制策略。
为了解麻雀搜索(Sparrow Search Algorithm,SSA)算法求解电梯起重机械节能控制模型过程中的适用性和局限性,并有针对性地提出改进策略,需要先利用SSA算法求解电梯起重机械节能控制模型,再以此为基础,设计多策略改进SSA算法,解决SSA算法存在的不足,提升模型求解精度。具体步骤如下:
步骤1:初始化。令每个麻雀个体均为一个潜在的电梯起重机械节能控制策略(即启动与停止的 台电梯)Z 。初始化种群内存在N 个麻雀个体,即N个潜在的电梯起重机械节能控制策略。令第 个麻雀个体的表达形式为Z^i=(Z^i,1,Z^i,2…,Z^i,D),D为电梯控制能耗潜在解的空间维度。
步骤2:更新发现者位置Zτ^i,^j。Zτ^i,^j为已经找到较为节能的启动与停止电梯控制数量的个体,它们通过不断地搜索和尝试[12],为整个启动与停止电梯群体提供优化的方向。Zτ^i,^j的更新公式如下:
式中:γ1、γ2为(0 ,1)内的任意数,且在这个范围内,每个数被选中的概率都是相等;γ3为(0.5,1)内的任意数;τ为迭代次数;τmax为τ值;^j为维度编号;ζ为电梯运行速度任意数,且遵循一种特殊的概率分布。
步骤3:更新电梯能耗跟随者位置Z'τ+1 ^i,^j。跟随者根据发现者提供的节能控制策略进行调整和优化,以期望找到更优的电梯起重机械节能控制策略[13-15]。
在SSA算法中,发现者位置更新方式易于陷入局部极值,应用在节能控制模型多目标平衡求解任务中,影响求解效果。通过边界学习策略改进发现者未发现较优电梯起重机械节能控制策略时的位置更新方式,可有效解决上述问题,增强全局优化搜索能力。
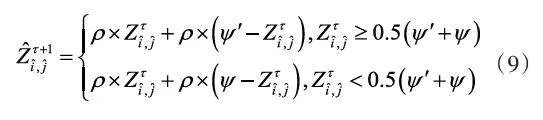
引入边界学习策略后,发现者位置更新公式如下:
式中:ρ为(0,1]内的任意数,且在这个范围内,每个数被选中的概率都是相等的。
利用Sine混沌映射策略和边界学习车辆,设计多策略改进SSA算法,求解1.1小节构建的电梯起重机械节能控制模型,寻找能够在满足约束条件(乘客乘坐电梯的舒适度)的前提下,最小化电梯起重机械能耗的最优节能控制策略,具体步骤如下:
步骤1:利用Sine混沌映射策略,初始化电梯起重机械节能控制模型的潜在解集合。
步骤2:求解各麻雀的适应度与适应度均值。
步骤3:依据边界学习策略,更新^Zτ+1 ^i,^j为整个群体提供电梯起重机械节能控制模型求解的优化方向。
步骤4:更新Zτ w、Fw、Zτ u、Fu,并分析算法是否达到τmax,若达到τmax,则输出最小能耗和等待时间对应的电梯起重机械节能控制策略。反之,返回步骤2。由此完成电梯起重机节能多目标平衡控制。
2 实验分析
2.1 实验环境与参数设置
在电梯起重机械节能控制方法的研究和实验中,实验对象是由电梯的驱动装置、控制系统,以及传感器等共同构成的电梯起重机械,该电梯起重机械的相关参数见表1。该电梯起重机械节能控制的实验环境如图1所示。
在图1所示的NICE3000+型号电梯控制柜内,进行电梯起重机械节能控制实验,分析本文方法的节能控制效果。将传感器采集的电梯运行速度、不同速度能耗、电梯轿厢质量等信号输入到电梯控制核心处理器STC89C52单片机中。在电梯控制核心处理器中搭载Windows 10操作系统和MATLAB仿真平台。仿真平台运行Python编程语言采用Tensorflow深度学习框架训练文中设计算法。设置SSA算法参数,控制模型解(麻雀个体)D:10个;潜在解的空间维度N:5;任意数γ1、γ2、γ3分别为0.5、0.5、0.6;最大迭代次数τmax为450;任意数ζ为5;任意数ν为-0.5;电梯起重机械节能控制模型潜在解的上、下限ψ'、ψ'为-1、1;控制参数-ω为8;任意数ρ为0.5。
2.2 实验结果分析
2.2.1多策略改进SSA算法求解性能测试
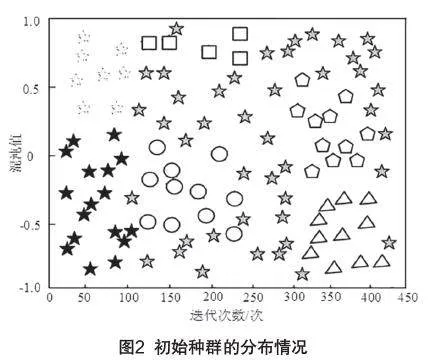
利用本文设计的多策略改进S SA算法求解电梯起重机械节能控制模型,得到最佳的节能控制策略,初始种群个体在电梯起重机械节能控制模型潜在解空间内的分布情况如图2所示。
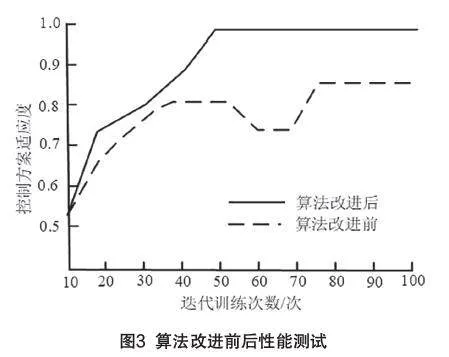
由图2可知,不同种类潜在解分布不均匀,算法可能陷入局部最优解,而全局最优解的搜索难度较大。在此条件下,本文方法利用Sine混沌映射策略改进后,求解电梯起重机械节能控制模型,测试算法改进后的迭代求解性能,结果如图3所示。
由图3可知,算法改进前,求解最优方案适应度在55次时出现降低,且在适应度值达到0.8时即输出最优解,说明算法陷入了局部最优解。而本文方法通过Sine混沌映射策略,使得初始种群在求解空间内均匀分布,然后利用边界学习策略提高算法的全局搜索能力,易于跳出局部极值,提高求解的准确性和有效性,利于提升电梯起重机械节能控制效果。
2.2.2 电梯起重机械节能控制性能测试
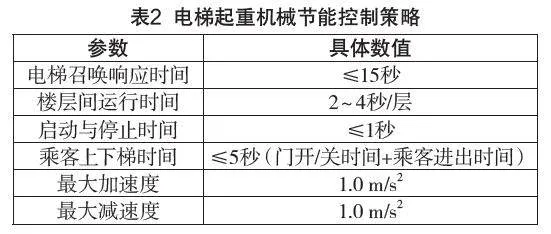
利用改进算法求解节能控制模型后,可获取最优电梯起重机械节能控制策略,见表2。
基于表2控制参数对电梯起重机械进行节能控制。
1)电梯不同运行速度、不同载荷状态下电梯起重机械能耗测试
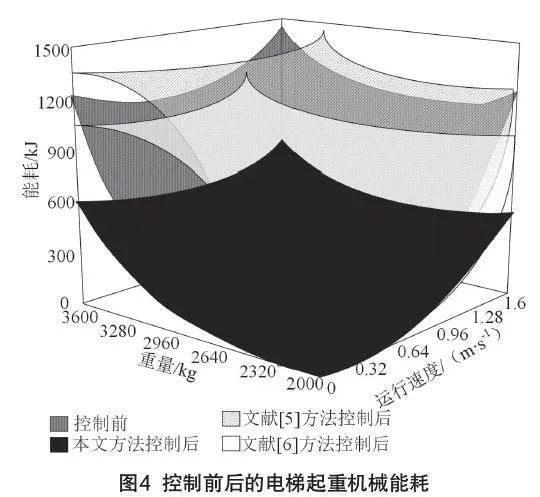
由表1中的电梯起重机械参数可知,起重机系统空载时自重载荷为2000 kg,额定重载载荷为3600kg。测试经过本文方法、文献[5]方法、文献[6]方法控制前后,该电梯在2000~3600 kg不同载荷状态下,起重机械在启动、停止、匀速不同加减速运行状态(0~1.6 m/s)下的能耗变化情况如图4所示。
从图4中可以看出,随着载荷重量与运行速度的增长,该电梯起重机械的能耗均呈上升趋势,经过本文方法控制前,最高能耗达到1500 kJ。而应用文献[5]方法、文献[6]方法方法控制后,能耗明显降低,但在1200 kJ以上。而应用本文方法控制后的电梯起重机械能耗,均明显低于其他方法,降至900kJ以下。对比实验证明:本文方法可有效完成电梯起重机械节能控制,并降低电梯起重机械的能耗。
2)不同时段内电梯起重机节能控制后的乘客舒适度测试
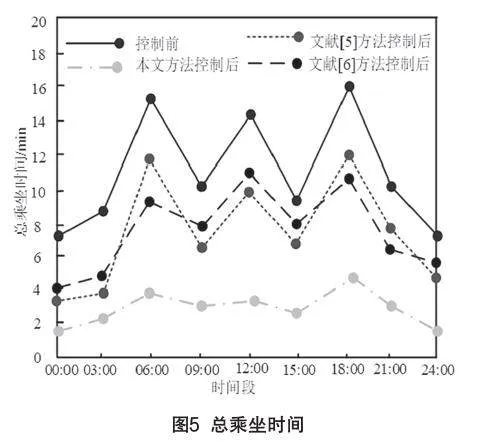
测试高峰时段和空载时段,电梯起重机节能控制后的在不同楼层100名乘客包括等待时间和上下梯时间的总乘坐时间,总乘坐时间越少,有利于提升乘客舒适度,也能证明该方法进行节能控速过程中对乘客便利体验影响较小。测试结果如图5所示。
由图5可知,在5:0 0—8:0 0、10:0 0—13:0 0、17:00—19:00这三个乘客高峰时段,应用本文方法进行电梯起重机节能控制后,总乘坐时间低于控制前和其他方法,控制在5 min以内。这是因为本文方法有效控制电梯的速度和加速度,在减少能源消耗的同时,还可以实时交通流量和乘客需求次数优化电梯的运行,减少空载和半载运行,减少乘客的等待时间和电梯的停靠次数,提高乘客的满意度和舒适度。
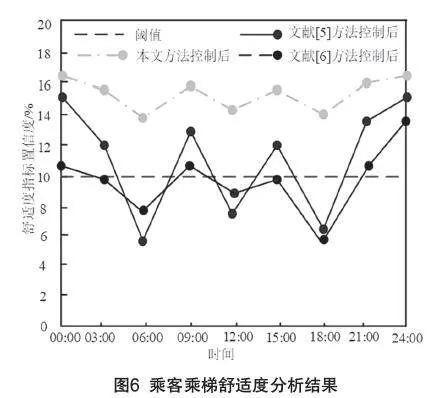
由于本文方法在舒适度约束中建立了舒适度评价指标,乘客乘坐电梯的舒适度指标置信度越大,说明乘客乘梯越舒适。因此分析应用本文方法控制后,该电梯的乘客乘梯舒适度,分析结果如图6所示。
从图6中可以看出,在早、中、晚乘客流量较高时,舒适度指标置信值较低,表示此时乘客乘梯的舒适度有所下降。但本文方法控制后不同时刻舒适置信度均未低于阈值,而其他方法存在低于阈值情况。这说明应用本文方法后,该电梯的乘客乘梯舒适度较优,可为乘客提供较好的乘梯体验。
3 结 论
研究多策略改进SSA算法优化下电梯起重机节能多目标平衡控制方法。实验结果证明,该方法在电梯运行模式、载荷变化下能够自适应调整起重机械能量,在降低起重机械消耗能量的同时降低乘客乘坐时间,提升舒适度。同时在理论上引入多种策略对传统的SSA算法进行改进,有效地克服了传统算法在求解控制模型时容易陷入局部最优的缺点,使得SSA算法在全局搜索和局部精细调整之间取得了良好的平衡,提高求解的准确性和稳定性。
参考文献
[1]杨红娟,周谦,李凯凯,等.基于有轨制导车辆的多维度电梯物理模型建立与控制系统研究[J].中国工程机械学报,2021,19(3):201-206.
[2]方俊杰,潘伟,徐润喆,等.基于CW-VIKOR法的电梯运行状况安全评估[J].中国安全生产科学技术,2022,18(5): 229-234.
[3]覃羡烘.基于RBFNN的桥式起重机AHSMC控制策略[J].控制工程,2022,29(9):1679-1687.
[4]余震,余进,王海兰,等.基于拉格朗日算法的起重机摇摆模型构建及其防摇摆模糊控制系统仿真分析[J].武汉科技大学学报,2022,45(3):197-203.
[5]彭云建,杜艺聪,仲兆峰.基于等间隔运行模式的群组电梯系统优化调度方法[J].控制理论与应用,2023,40(5):949-956.
[6]刘宇,张聪,李涛.强化学习A3C算法在电梯调度中的建模及应用[J].计算机工程与设计,2022,43(1):196-202.
[7]LEE S Y, CHO I P, HONG C P. Contactless elevator button control system based on weighted k-nn algorithm"for al edge computing environment[J]. Journal of web"engineering, 2022, 21(2): 443-457.
[8]顾玲丽,董佳琦,许洪华.基于强化蚁群算法的高层住宅电梯群调度研究[J].计算机仿真,2022,39(1):412-417.
[9]毛清华,张强.融合柯西变异和反向学习的改进麻雀算法[J].计算机科学与探索,2021,15(6):1155-1164.
[10]李大海,李鑫,王振东.融合多策略的增强麻雀搜索算法及其应用[J].计算机应用研究,2023,40(10):3032-3039.
[11]闫少强, 刘卫东, 杨萍,等. 基于K - m e a n s 聚类的多种群麻雀搜索算法[ J ] . 北京航空航天大学学报,2024,50(2):508-518.
[12]肖友刚,王辉堤,李蔚,等.桥式起重机定位防摆改进型自抗扰控制[J].控制理论与应用,2023,40(3):574-582.
[13]石怀涛,姚福星,白晓天,等.基于能量分析的桥式起重机防摆控制方法[J].控制与决策,2021,36(12):3091-3096.
[14]巫江祥,陆后军.基于干扰观测器的桥式起重机终端滑模控制[J].控制工程,2021,28(9):1867-1872.
[15]丁伟.基于AMESim的起重机回转系统建模与冲击抑制[J].机床与液压,2022,50(22):69-73.
作者简介
汪保良,通信作者,硕士研究生,高级工程师,主要从事机电类特种设备检验工作。
(责任编辑:袁文静)
