并联副回路串级控制系统的稳态分析
2025-01-31王丽坤翟斌席永胜


摘 要 分析了过程控制实际应用中,并联副回路串级控制系统能否经过主、副控制器的调节实现主对象的精确跟踪。通过对并联串级控制系统建模,计算其余差从而分析稳态性质,并由此给出了一些工程应用中的建议。理论计算、仿真验证及工程实例均表明该控制方案能达到预期的控制要求,为流程工业过程控制中的同类问题提供解决方案。
关键词 并联副回路 串级控制 稳态分析 仿真
中图分类号 TP273"" 文献标志码 A"" 文章编号 1000 3932(2025)01 0022 05
串级控制由于选用可测中间变量构成负反馈回路,对影响中间变量的干扰进行预先快速调节,可改善整个控制系统的动态和稳态品质[1]。在串级控制系统中,副控制器快速“预调”加主控制器缓慢“精调”的设置,使得控制系统工作频率更高、抗干扰能力更强,并具有一定的自适应和超前控制的能力,因此对一些复杂对象可以达到很好的控制效果[2]。
然而在一些实际工程应用中,经常碰到将多个工况及属性完全一样的对象并联工作的情况[3,4],例如在某工艺路线中,为提高负荷经常将多个反应器并联工作,设置进料总管压力与多个并联反应器进料流量的串级控制,以维持反应系统压力稳定,同时兼顾多个反应器平稳进料,在保证反应稳定的前提下,尽量减小催化剂对设备的腐蚀。这种串级控制系统可称为并联副回路串级控制系统。并联副回路串级控制中,一个主控制器给定多个副控制器,多个副对象的存在产生多条前向、反馈通道,它们在相互作用下,各个被控对象还能否完成无偏差跟踪成为人们关注的问题。目前,对传统串级控制系统的性能评级已非常成熟[5],而对并联副回路串级控制系统的理论分析较少。笔者以余差为指标,分析当系统受到扰动后,能否通过多个控制器的调节使系统再次回到稳态,以及再次回到稳态时能否无偏差地跟踪给定值。
1 系统描述
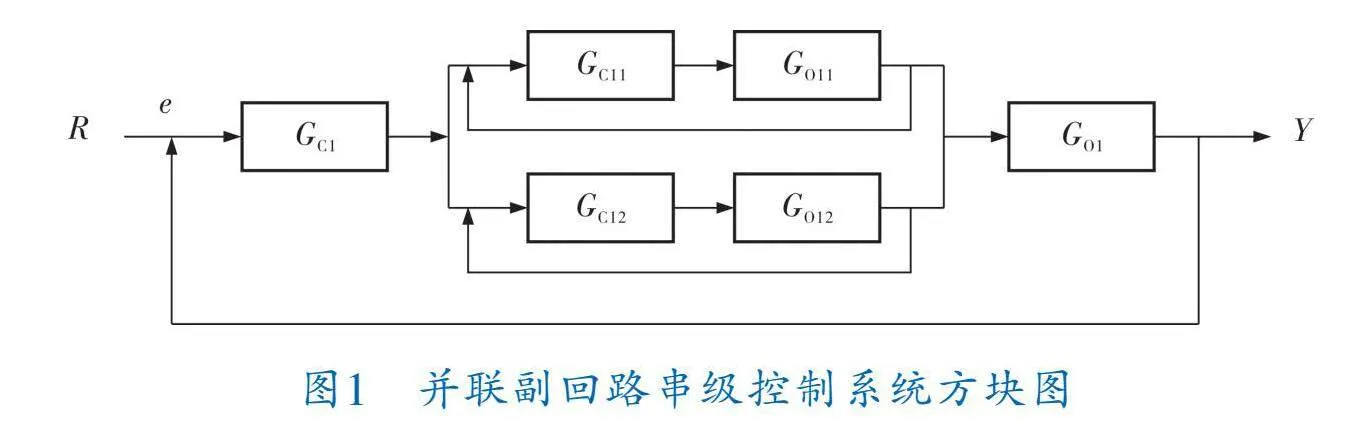
由于智能变送器和执行机构一般可看作纯比例环节,放大倍数可叠加至其他环节,因此并联副回路串级控制系统的方块图可简化为图1。图中R为系统输入,Y为系统输出,e为偏差,G为主对象,G和G分别为两个并联工作的副对象(通常具有相同的属性),G为主控制器,G和G分别为两个副控制器,G和G分别为两个副对象的调节器,G为主对象的测量反馈信号,G和G为两个副对象的测量反馈信号,测量信号用于和给定值进行比较,作为控制器的输入信号进行控制。
副对象通常为能够快速影响主对象的参数,副对象一般都为一阶惯性环节,记两个并联副对象分别为:
G=
G=
其中,K、K分别为副对象1和副对象2的放大倍数;T、T分别为副对象1和副对象2的时间常数。
主对象一般为工艺生产的质量指标,或者与质量指标有单值映射关系的参数,通常主对象都是副对象的“累积”量,因此主对象往往纯滞后时间较长,惯性较强,记主对象为:
G=e
其中,K为主对象的放大倍数;T为主对象的事时间常数,τ为主对象的纯滞后时间。
在串级控制中,副回路是一个随动系统,副控制器一般为纯比例控制,记两个并联副控制器分别为:
G=K
G=K
其中,K、K为副控制器1和副控制器2的比例系数。
主对象体现工艺质量指标,为了保证主对象的平稳性和精度,主控制器必须有积分作用,因此主控制器通常都选用比例积分控制器,记主控制器为:
G=K(1+)
其中,K为主控制器的比例系数;T为主控制器的积分系数。
2 稳态分析
系统的输出响应分为动态响应和稳态响应两部分,分别对应动态过程和稳态过程。动态过程又称过渡过程或瞬态过程,反映系统的动态特性;稳态过程是指当时间趋于无穷大时系统的输出状态,反映系统的稳态特性[6]。对控制系统进行分析常用的方法有根轨迹法、伯德图法、稳定性和稳定裕度计算法等[7]。控制系统的稳态分析用于研究控制系统的结构设置是否合理,能否满足精确性的要求。如果对系统快速性和稳定性有较高要求,则可通过控制系统的动态分析对控制器参数进行进一步的整定。笔者着重研究并联副回路串级控制系统能否满足无偏差跟踪,因此以下只给出系统的稳态分析过程。
由叠加原理可知,引起系统余差的来源主要是系统输入的变化和系统受到外界的干扰。在串级控制中,外界干扰分为作用于主对象上和作用于副对象上两种。以下讨论扰动作用于副对象上。
记N为作用于副对象G上的干扰。为使运算简洁,可将两个并联的副回路等效为一个副回路,记做G,则有:
G=+
于是,系统的开环传递函数为GGG。
根据线性叠加原理,系统输出为系统输入跟扰动共同作用的结果,当在副对象G上加入扰动后,系统输出为:
Y=R+N
主对象余差为系统输入减系统输出,即:
e=R-Y=R-R+N
=R-N
=e+e=e
其中,e为主对象受到输入变化引起的余差;e为主对象受干扰引起的余差;e为主对象总的余差。
通过拉普拉斯变换终值定律,时域中时间区域无穷大时的余差等效为频域中s趋于0,即:
e(t)|=e=(e+e)
=R-N
可以看出余差由两部分构成,一部分由系统输入引起,另一部分由外界扰动引起,根据叠加原理可对两部分分别进行分析。
仅受系统输入影响为:
(e)=R
系统输入形式不同,余差的值将不同,常见的系统输入有脉冲信号、阶跃信号、斜坡信号、抛物线信号及正弦信号等,但实际中一般都是脉冲信号或阶跃信号,而以阶跃信号扰动最为严重。
当系统输入为单位阶跃信号时余差为0,即:
其中,r(t)为时域中单位阶跃信号的传递函数。
仅受外界扰动影响为:
(e)=-N
系统受到外界扰动的形式多种多样,例如脉冲信号这样的短暂性扰动,或者阶跃信号这样持续性的扰动,且因干扰通道属性的不同,造成的扰动结果差别也很大。一般而言,形式单一、作用强烈的扰动可通过数据回归建立扰动模型,通过改进控制器来抑制扰动引起的影响;而随机性的脉冲扰动和突然出现的阶跃扰动,是控制器需要重点克服的。
扰动为单位阶跃信号时余差为0,即:
扰动作用于主对象上时,余差的分析方式及计算过程同上,经计算余差也为0,这里不再赘述。
经推导计算,对于如上给定的对象和扰动类型,在并联副回路串级控制系统中,无论干扰作用于主对象上还是副对象上,主对象均能无偏差地跟踪系统给定值。
3 仿真分析
为验证上述推导计算的正确性,对上述结构形式的控制系统取特例进行仿真验证。设两个副对象G、G及主对象G传递函数分别为:G=1/(2s+1),G=1/(2s+1),G=1/(8s+1)e-s,使用MATLAB中的Simulink搭建的并联副回路串级控制系统如图2所示,图中N1、N11均为单位阶跃扰动,S2、S4、S5、S6均为示波器,用于观察中间个变量的动态响应。
主控制器为PI控制,比例因子P=2.33,积分因子I=0.32;两个副控制器为比例控制,比例因子P=0.59,采样时间为1 s。
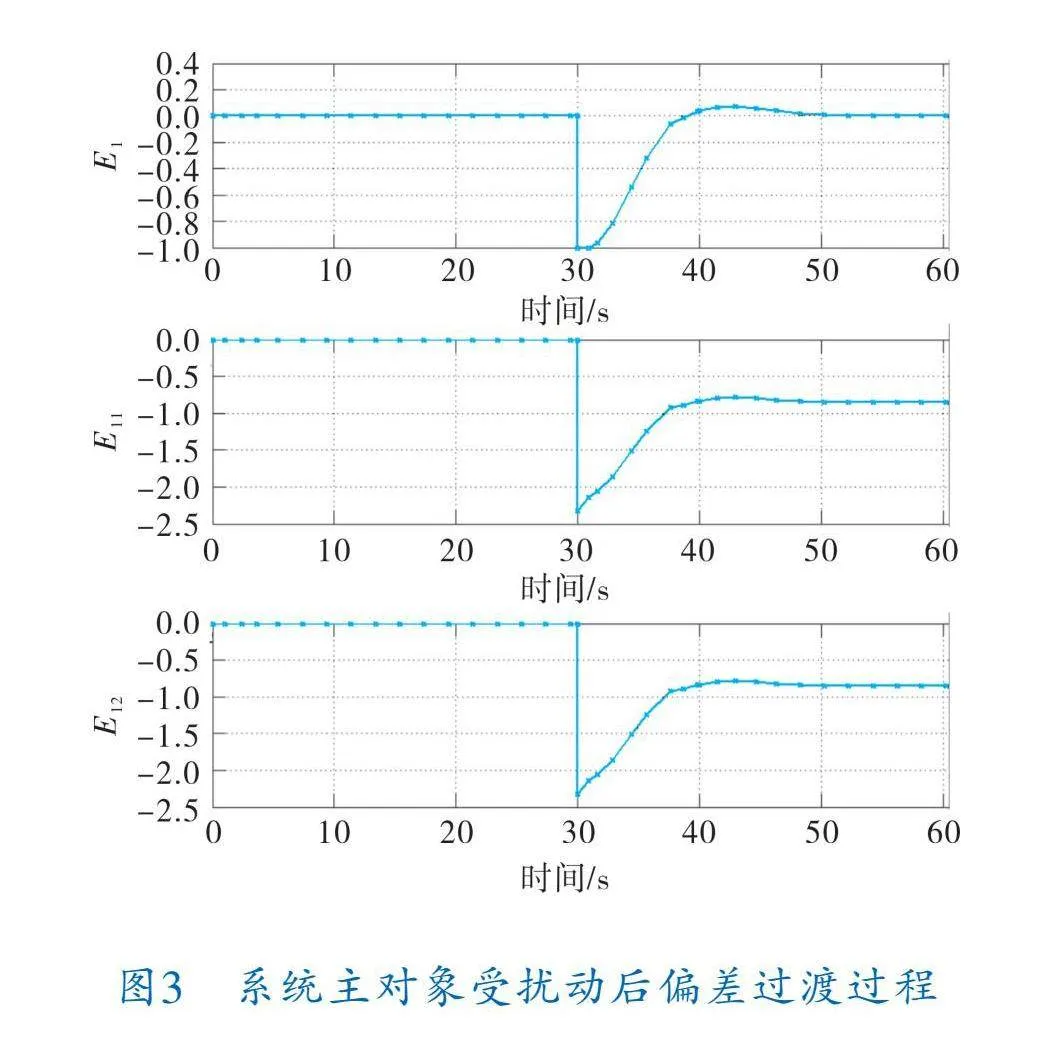
分3种情况分别仿真:系统受输入扰动、系统副对象受扰动和系统主对象受扰动。在实际工程中,一般认为阶跃扰动对系统过程的干扰最强,因此以下仿真中扰动均取阶跃信号,幅值为1。受篇幅限制,仅给出主对象受扰动后系统的过渡过程,如图3所示。
图3给出了主对象偏差E1和两个副对象偏差E11、E12的过渡过程。在经过控制器的调整后,主对象余差为0,E11、E12不为0,所以两个副回路并没有完全跟踪设定,且余差不同,即两个副对象工作点不同。如前所述,串级控制的目的在于通过选用可测中间变量来快速调节系统输出,以保证主回路的控制品质,而副对象只是一个中间调节环节,通常并无精确性要求,因此串级控制对副回路余差不为0是可以接受的。然而在某些特殊的情况下,如果希望副回路余差也为0,则需在副控制器中引入积分作用。当副控制器中含有积分作用后,副回路开环传递函数的“型”将增加1,但副回路闭环传递函数的“型”不变,因而主回路的“型”也不会改变,因此文中第3章对主对象余差分析的结果不变。
另外,在并联副回路的串级控制系统中,即使某个副回路受到扰动,或者副对象自身特性发生变化(例如设备结垢、磨损等),或者在多个副对象属性本身存在差异(例如设备制造存在偏差、副对象配管方式不同等),都不会影响整个控制系统的控制性能,只要根据需要调整控制器的结构和参数,都能保证主、副对象达到需要的控制要求。然而由于负反馈的存在,当副控制器有积分作用时偏差将多次影响控制器的输出,使整个系统的工作频率降低、过渡过程加长、超调增加,主对象的动态特性变差。应根据具体对象的控制需要,进行合理地选择。
4 结束语
对于文中给定型式的并联副回路串级控制系统,即使多个副对象特性存在差异,主对象均可以克服扰动无偏差跟踪给定值,但副对象余差是否为0则取决于副控制器是否有积分作用。当副控制器无积分作用时,串级控制系统对扰动的调节过程快速、平稳,但副对象余差不为0;当副控制器有积分作用时,副对象余差为0,但调节过程缓慢,并伴有一定的超调,在某些情况下甚至可能发生大幅振荡,因此副控制器的选用需根据工艺生产要求确定。在实际工程设计方面,已将这种并联副回路串级控制系统成功应用于某工艺过程中,对于反应进料总管压力与多路流量的并联串级控制系统,主、副控制器均引入积分作用,使用均匀控制的思想适当调整比例和积分因子的值,可以在平稳性、精确性和快速性之间取得平衡,在维持反应系统压力稳定的前提下,平稳各路反应器的进料量和流速,保证转化率达标的同时减小催化剂对设备的腐蚀,取得了良好的效果。
参 考 文 献
[1] 孙洪程.过程控制工程[M].北京:高等教育出版社,2006:58-86.
[2] 唐贤伦,仇国庆,李银国,等.基于MATLAB的PID算法在串级控制系统中的应用[J].重庆大学学报,2005,28(9):61-63.
[3] 吴伟林,王锦标.并行串级系统的无扰切换[J].热力发电,1999(3):54-55;67.
[4] 孔睿.一个主回路两个副回路串级回路无扰动切换方案[J].石油规划设计,1996(3):43-44.
[5] 杨政厚,房方,刘吉臻.串级控制回路的性能评价方法[J].动力工程学报,2009,29(5):426-431.
[6] 厉玉明,马绍坤,王晶.自动控制原理[M].北京:化学工业出版社,2001:42-43.
[7] 徐今强,王荣辉,王筱珍.多回路串级控制系统开环传递函数的分析[J].广东海洋大学学报,2012,32(6):92-95.
(收稿日期:2024-05-09,修回日期:2024-12-11)
Steady State Analysis of Parallel Subloop Cascade
Control System
WANG Li kun1, ZHAI Bin2, XI Yong sheng3
(1. Chengdu Branch of China ENFI Engineering Corporation; 2. China Bluestar Chengrand Co., Ltd.;
3. Hualu Engineering amp; Technology Co., Ltd.)
Abstract"" In this paper, whether the parallel subloop cascade control system can realize the precise tracking of the main object through the adjustment of the main controller and the auxiliary controller was analyzed. Through modeling the parallel cascade control system and calculating the residual error, the steady state properties were analyzed, and some suggestions for engineering applications were presented. Theoretical calculation, simulation verification and engineering example show that, the control scheme proposed can meet the expected control requirements, and provide solutions for similar problems in process control of process industry.
Key words""" parallel subloop, cascade control, steady state analysis, simulation
