储能并网模式下的VSG模糊控制策略
2024-12-17殷勤杨健毛瑞益



摘 要:本文针对储能并网模式下投切负荷微网频率和功率变化大的问题,提出了一种虚拟惯量和阻尼灵活可控的虚拟同步机(VSG)模糊控制策略。首先,建立储能VSG控制模型,给出计及频率变化率最大值和储能放电特性的惯量范围,提出了储能并网时的VSG模糊控制策略,使阻尼和惯量在模糊规则下灵活变化,提升电网稳定。其次,在MATLAB/Simulink中比较了3种控制方式,验证了所提策略可减少功率和频率波动,并能降低对储能容量的需求。
关键词:虚拟同步机;惯量;模糊控制;储能
中图分类号:TM 76" " " " " 文献标志码:A
在石化资源紧缺的背景下,可再生能源在发电中的比例越来越多。可再生能源机组大量使用电力电子器件接入电网,将较大幅度降低系统惯量,利用虚拟同步机技术提高惯量水平。许多文献提出了各种虚拟惯量和阻尼控制策略来提升系统稳定性。文献[1]分析了阻尼、虚拟惯量和有功下垂系数的变化规律,选择了一种双机互联自适应策略,但是计算较复杂,阻尼、虚拟惯量和有功下垂系数自适应参数较难计算。文献[2]和文献[3]提出了一种基于模糊控制算法的自适应VSG虚拟惯量控制策略,但是没有具体分析模糊控制器的输入、输出范围。文献[4]根据储能物理约束分析了虚拟同步机储能单元配置和参数选取范围,但是没有考虑储能荷电状态的影响。
针对上述控制策略的不足,本文在建立储能并网模式下的VSG微网控制模型的基础上引入模糊控制理论,分析并计算虚拟惯量取值范围,将其作为模糊控制的输出论域,同时使用模糊规则控制虚拟惯量和阻尼进行灵活变化。MATLAB/Simulink仿真结果表明,本文所提策略能够显著提高负荷扰动时的系统动态性能。
1 虚拟同步机工作原理
分布式电源通常使用电力电子器件接入电网,静态和动态性能与大电网不同,使分布式电源具有与同步机类似的特性,可以使用虚拟同步机技术模拟传统发电机特性,此为VSG技术。使用VSG模糊控制策略的重点是采用模糊控制方法实时且自动改变虚拟惯量和阻尼参数,从而提升频率和功率动态性能。
1.1 VSG运动方程
虚拟同步机运动方程模拟传统同步机的转子运动方式,通常将电网角速度近似为VSG额定角速度,取极对数为1,方程如公式(1)所示。
(1)
式中:t为扰动时VSG振荡时间;J为虚拟惯量;D为阻尼;Tm、To、Td分别为VSG机械转矩、电磁转矩和阻尼转矩;Po、Pm分别为VSG机械功率和电磁功率;ωo为VSG输出角速度;ωs为VSG额定角速度;δ为VSG功角。
1.2 虚拟调速器
与同步机的调速器相似,VSG将实际角频率和额定角频率的差值作为虚拟调速器的输入,补偿了虚拟机械功率。VSG系统波动可实现频率的无差调节,方程如公式(2)所示。
Pm=Pset-Kp(ωs-ωo) " " " " " " " " " " "(2)
式中:Kp为频率调节系数;Pset为调度功率。
1.3 无功下垂
将实际无功功率和无功指令的差值作为反馈量,设定实际需要输出的电压。无功下垂功能可自动调节实际输出电压值,使输出电压保持稳定。在并网模式下,无功调度指令通常由调度控制中心下达,因此设Qref=0,方程如公式(3)所示。
E=Uref+kq(Qref-Qo) " " " " " " " " "(3)
式中:E为VSG内电势;Uref为VSG输出电压参考值;kq为无功调节系数;Qref为无功调度指令;Qo为VSG实际输出无功功率。
2 模糊VSG控制
2.1 虚拟惯量和阻尼对系统动态性能的影响
在虚拟惯量和阻尼固定VSG中,可再生能源出力和负荷具有随机性,根据公式(1)可以得到VSG的频率偏差和频率变化曲线,如图1所示,整个变化过程分为I、II、III和IV共4个阶段。
在图1(a)中,P1和δ1表示t0时刻a稳定状态时的系统输出有功功率和功角;P2和δ2表示当系统受到扰动、达到新稳定状态b时的有功功率和功角,由于惯性作用,系统不会一次稳定;P3和δ3表示在惯性作用和暂态c时系统输出最大有功功率和功角,系统扰动后需要经过多个周期振荡才能稳定在b状态,功率和频率在这段过程中按照阻尼振荡。在图1(b)中,整个振荡过程共分为I、II、III和IV阶段,分别对应4个时间段,即t0~t1、t1~t2、t2~t3和t3~t4;f0表示系统额定频率。
由公式(1)可知,同时调节虚拟惯量J和阻尼系数D可改变角频率偏差和角频率变化率,并增加调节灵活性。t0~t1时刻为I阶段,调度指令功率大于输出功率,系统处于加速阶段,功角增大,此时dω/dtgt;0且Δωgt;0,应适当增加J和D以减少频率偏差。t1~t2时刻为II阶段,由于惯性作用频率回落,因此系统处于减速阶段,调度指令功率小于输出功率,此时dω/dtlt;0且Δωgt;0,此时应减少虚拟惯量J,增加阻尼D,以增加角速度变化率并促进频率尽快恢复稳定。t2~t3阶段为加速阶段,t3~t4阶段为减速阶段,虚拟惯量J和阻尼系数D的调节与上述相同,应合理调节以避免引起功率振荡,影响系统稳定运行。
2.2 考虑储能限制的虚拟惯量取值范围
利用公式(1)~公式(3)计算系统频率f,如公式(4)所示。
(4)
式中:fs为VSG系统的额定频率。
当调度指令发生变化或者负荷波动时,系统频率变化率通常用ROCOF来表示,由公式(4)可以得出公式(5)。
(5)
由公式(5)可以看出,当虚拟惯量增大时,ROCOF减少,系统的频率超调量将减少。显然,在t=0时刻,ROCOF有最大值,因此J满足公式(6)。
(6)
式中:ΔPmax为调度指令变化或者负荷波动最大值;ROCOFmax为频率变化率最大值;Jmin为虚拟惯量最小值。
根据文献[5],当系统处于欠阻尼状态时,为减少微网波动,储能单元存在功率波动最大值Pmax,如公式(7)所示。
(7)
式中:X为微网线路等值电抗;U为VSG输出电压幅值;为应对负荷波动时储能单元提供充、放电功率的波动系数。
同时,由于存在储能电池最大放电倍率限制,因此输出功率受到限制。储能单元在不同荷电状态的最大功率如公式(8)所示。
Pmax=SsocSnμref" " " " " " " " " " " (8)
式中:Ssoc为储能电池放电状态;Sn为储能电池额定容量;μref为SOC相对功率额定系数。
考虑储能充放电功率限制和放电倍率限制,为保护储能电池健康,将电池在Ssoc=50%下的最大功率输出限制为26 kW。VSG模糊控制主要参数见表1,由公式(7)、公式(8)和表1可知,虚拟惯量最大取值为3.8。根据公式(6)计算出虚拟惯量最小值为0.2。
2.3 模糊控制环节设计
频率偏差Δf和频率变化量df/dt为模糊控制器的输入量,虚拟惯量和阻尼ΔJ、ΔD为模糊控制器的2个输出量。经过模糊控制器后,结合虚拟惯量和阻尼初始值,可以得到具体的参考值,如公式(9)所示。
(9)
式中:J0、D0分别为虚拟阻尼、惯量初始值。
模糊控制框图如图2所示。
可用5个区域表示模糊环节输入变量和输出变量ΔJ的模糊集,分别为{NB(负大),NS(负小),Z(零),PS(正小),PB(正大)},用3个区域表示输出变量ΔD的模糊集,分别为{PS(正小),PM(正中),PB(正大)}。输入、输出量的隶属函数均使用“中间三角型,两边Z型”,去模糊化方法采用重心法。ΔJ、ΔD的模糊规则见表2和表3,表中左边第一列为df/dt,最上方第一行为Δf。
本文主要考虑当放电特性和储能容量时,各种虚拟惯量对系统特性的影响,ΔJ的输出论域根据第2.1和2.2节的分析来设定,为[-1,1],虚拟惯量初始值为J0=2,系数kf=1.8,系数kj=2。本文选择虚拟阻尼,使系统处于欠阻尼状态并使稳定时间适宜,初始值D0=25,本文设定阻尼输出论域ΔD为[0,10]。
表2 ΔJ模糊规则
ΔJ NB NS Z PS PB
NB PM PB NS Z NB
NS PM PB Z NS Z
Z PB Z NS Z PB
PS NS NS Z PB PM
PB NB NB PS PB PB
表3 ΔD模糊规则
ΔD NB NS Z PS PB
NB PM PS PM PB PM
NS PS PS PM PB PB
Z PM PM PB PM PS
PS PM PB PM PS PB
PB PS PB PB PS PM
3 仿真试验
为了验证本文考虑储能容量和放电特性的VSG模糊控制策略的正确性,在MATLAB/Simulink中构建储能并网VSG仿真模型。储能电池容量为3 Ah,并网逆变器采用VSG模糊控制。主要仿真参数见表1。
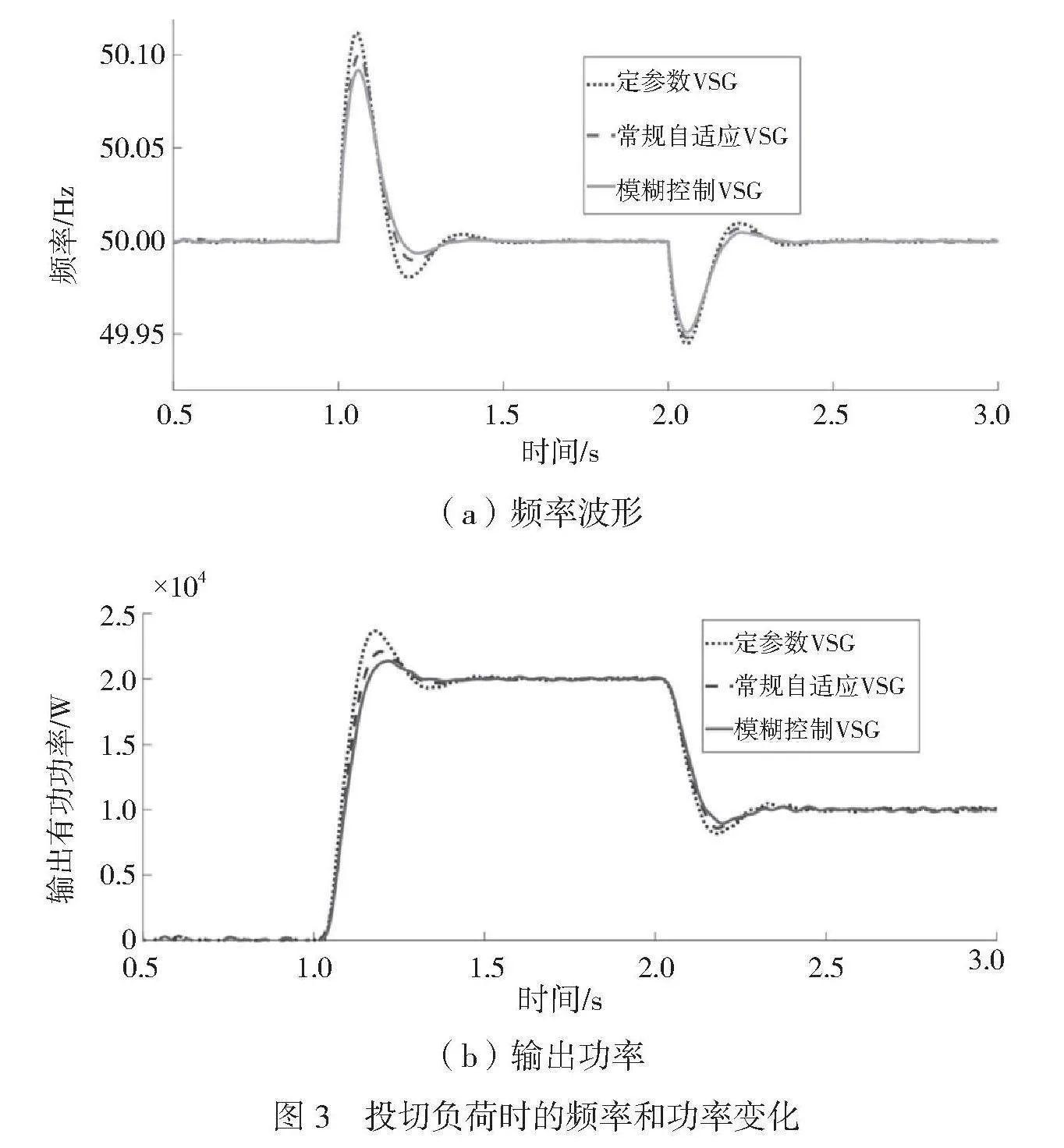
系统在0 s时刻并网,设定在1 s时刻加入20 kW负荷,2 s时刻负荷减至10 kW。本文比较3种不同控制方式下的VSG频率和输出有功功率变化情况。1) 定参数VSG,J=2,D=25。2) 常规自适应,VSG,J0=2,D0=25。3) 模糊控制VSG,J0=2,D0=25。
投切负荷时频率和功率变化如图3所示。从图3(a)可以看出,在设定的虚拟惯量和阻尼范围内,无论使用哪种控制模式,系统始终处于欠阻尼状态,可以较好地自适应变化。当负荷发生变化时,系统开始振荡,振荡幅值各有不同。但是随着时间变化,系统频率最终恢复至50 Hz,说明3种控制模式均可以使系统恢复稳定。但是从图3(a)可以看出,在3种控制方式中,本文所提的模糊控制VSG振荡幅值最好,超调量为0.91 Hz;常规自适应振荡幅值居中,超调量为0.11 Hz;定参数VSG振荡幅值最大,超调量为0.12 Hz,同时,模糊控制VSG系统能在最快时间内恢复稳定。
在图3(b)中,VSG频率和有功功率在负荷变化时的初始振荡时间有所相同,与频率变化相比,有功功率的振荡对系统影响更大,需要重点考虑。当采用定参数VSG控制时,输出有功功率最大,为23.69 kW,超出设定有功功率3.69 kW;当采用自适应VSG控制时,输出有功功率最大,为22.05 kW,超出设定有功功率2.05 kW;当采用模糊控制VSG时,输出有功功率最大,为21.49 kW,超出设定有功功率1.49 kW。比较3种控制方式,模糊控制VSG显著降低了输出有功功率最大变化量,有效减少了负荷变化时系统的功率振荡,大幅度降低了对储能容量和荷电状态的需求。
4 结论
本文针对储能并网过程中投切负荷时出现的频率和功率振荡问题,提出了基于VSG虚拟惯量和阻尼模糊的控制策略,得出以下2个结论。1) 由ROCOF最大值计算出虚拟惯量最小值,由储能系统容量和放电特性得出虚拟惯量最大值,将虚拟惯量范围作为模糊控制器的输出论域,优化设计惯性和阻尼。2) 利用MATLAB/Simulink比较定参数VSG、常规自适应VSG以及本文所提的模糊控制策略,验证了本文策略的正确性和有效性。
参考文献
[1]程江鹏,肖健梅,王锡淮.基于改进粒子群优化算法的VSG控制策略[J].控制工程,2021,28(10):2028-2037.
[2]程国栋,邵宣,王贵峰.虚拟同步发电机参数自适应控制策略[J].可再生能源,2021,39(12):1655-1661.
[3]周建萍,胡成奕,茅大钧,等.基于模糊控制的自适应虚拟同步发电机控制策略[J].广东电力,2020,33(1):53-60.
[4]张永超,王维庆,王海云,等.VSC-HVDC逆变侧的VSG转动惯量和阻尼系数模糊自适应控制[J].太阳能学报,2021,42(11):463-469.
[5]李吉祥,赵晋斌,屈克庆,等.考虑SOC特性的微电网VSG运行参数边界分析[J].电网技术,2018,42(5):1451-1457.
