基于MEMS传感器阵列大坝沉降监测设计
2024-12-17徐建宇郭永刚



摘 要:大坝沉降监测是确保水利设施安全的关键技术手段。虽然传统的大坝监测方法能提供一定的监测数据,但存在成本高、部署困难和监测点有限等问题,难以满足现代大坝监测的需求,本文提出了一种用于监测高海拔地区大坝沉降的技术,该技术基于微机电系统(MEMS)传感器阵列,利用MEMS传感器阵列监测沉降,并构建三维形变矢量模型。通过结合MEMS传感器阵列的扭转角度和各节长度,结合RS485通信协议传输数据并通过Lora模块结合网关对数据进行远程传输,以确定传感阵列在形变后的空间位置和长期远程监测。最后结合传感器数据采用细分算法和欧拉角进行反向推导,以拟合并重现地形表面的形态。
关键词:MEMS传感器;沉降监测;RS485;变形重构
中图分类号:TP 212" " 文献标志码:A
随着我国大坝建设规模扩大和设计结构复杂化,坝体结构在外部载荷作用下产生形变,而当这种形变累计到一定程度时会影响大坝运行的安全。因此,大坝沉降形变监测十分重要。目前,针对坝体沉降形变的监测大多采用水管式沉降仪、渗压计、静力水准仪、振弦式传感器及光纤测斜仪[1]。
微机电系统(MEMS)传感器具有体积小、成本低、易于智能化和数字化等优点。该技术被广泛应用于桥梁、边坡等国家基础建设设施的安全健康监测[2]。MEMS加速度计阵列可以用来追踪和分析物体的空间结构变化,阵列式位移监测系统(SAA)已被广泛部署于监测隧道开挖、大坝变形、滑坡等多个领域[3]。
本文基于MEMS传感器阵列提出了一种采用LoRA模块结合网关的大坝沉降形变监测技术,实现数据的远程传输和监测功能。
1 系统总体框架设计
1.1 系统结构设计
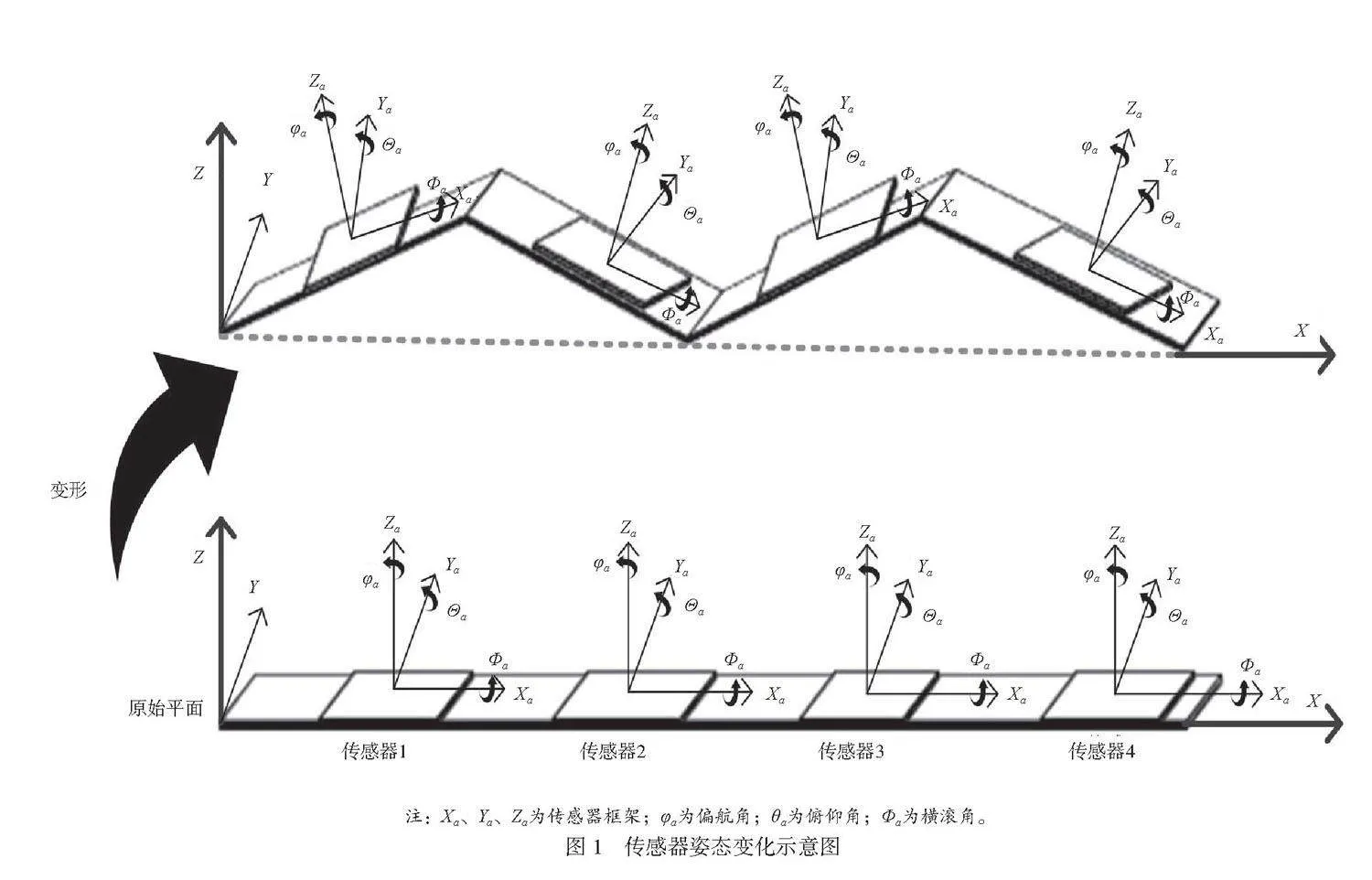
大坝沉降监测系统利用MEMS传感器阵列准确地感知并收集数据,以建立三维重构模型,进而生成大坝沉降的三维重构图像。该监测是通过在大坝被监测区域上部署一系列以一字形排列的传感器阵列来实现的。传感器姿态示意图如图1所示,能够直观地反映地面发生的微小形变。
通过收集MEMS传感器在不同姿态下的数据,结合传感器节点的偏转角度和各个支点之间的距离,可以确定传感器变形后的姿态位置。具体设计过程如下:在传感器布置方面,将MEMS传感器阵列均匀布置在大坝被监测区域表面,传感器间距根据被监测区域的具体尺寸和监测精度要求来确定。为了确保安装前的精度,需要对每个传感器节点进行校准,以消除零点漂移和传感器灵敏度不一致等问题。在数据传输与处理方面,通过RS485总线将各传感器节点的数据传输到终端设备。终端设备内置LoRa模块,通过LoRa网络将数据传输至中心网关,中心网关汇聚各终端的数据,并通过蜂窝网络上传至云端服务器。在云端服务器上,先对采集的数据进行预处理,滤除噪声和异常值。结合每个传感器节点的位置和偏转角度,计算每个传感器节点的空间坐标变化。在三维建模与反演方面,使用细分算法对各传感器节点的空间坐标进行拟合,生成连续的曲面模型,基于拟合的曲面模型,构建大坝沉降部分的三维变形向量模型。随后,将生成的三维变形向量模型导入Abaqus等有限元分析软件,方便工程师后续进行受力分析。通过三维反演,分析大坝承重墙的受力分布,识别受力集中的区域和潜在的薄弱点,并根据受力分析结果,提出相应的加固措施,确保大坝的结构稳定性。在动态监测与反馈过程方面,通过实时监测大坝的变形数据,设置预警阈值,当检测到异常变形时,系统自动发送预警信息。在云端服务器上,构建可视化平台,实时展示大坝的三维变形情况,便于工程师远程监控和决策。此外,由于MEMS传感器属于精密仪器且监测环境恶劣,需要定期对传感器阵列进行维护和校准,确保监测数据的准确性和可靠性。
本文系统地描述了MEMS传感器在大坝沉降监测中的设计,确保了监测系统的高效性和可靠性,这不仅为大坝安全提供了有力的技术支持,也为今后类似工程提供了可行的参考方案。
系统的工作环境要求耐高温高湿度的环境,连续工作时间不低于3个月。该监测装置的主体为RS485总线、电池模组、2套降压模组。其中,控制舱用于控制系统的采集时间同步问题。采集系统使用上位机寻址进行控制,每个加速度传感器模组上均有拨码器,因此可以独立发送数据。
1.2 系统网络架构设计
与传统的大坝监测方法[4-5]相比,现代化沉降监测面临的主要挑战是数据通信的限制,需要建立更可靠的通信链路解决上述问题。
本文结合RS485总线技术、LoRa调制技术及网状网络拓扑结构,设计了一个高效的大坝监测系统,旨在提升数据传输的可靠性和扩大覆盖范围。首先,RS485总线技术以其抗干扰能力强、通信距离远和组网灵活等优点,广泛应用于工业自动化和远程控制等领域,已被多项研究证实其在复杂环境下的数据传输可靠性。在大坝监测系统中,各传感器节点通过RS485总线实现稳定的数据采集和传输,RS485总线支持多点通信,确保在大规模监测场景中,各节点数据能及时、准确地传输到终端设备,满足大坝监测对数据传输可靠性的高要求。其次,LoRa调制技术作为一种低功耗广域网通信技术,以其传输距离远、功耗低、网络容量大等特点,解决了传统无线通信技术在大坝监测中面临的传输距离受限、功耗高等问题。多项研究表明,LoRa技术在远距离和低功耗应用中表现出色,显著提升了系统的通信效率和覆盖范围。传感器节点采集的数据先通过RS485总线传输到终端设备,再由终端设备通过LoRa网络发送至中心网关。LoRa技术不仅有效解决了数据远距离传输的问题,而且还通过其低功耗特性,大幅延长了传感器节点和终端设备的电池寿命,减少了维护成本,提升了系统的可持续性和经济性。网状网络拓扑结构的应用进一步提升了系统的可靠性和扩展性。在这种结构中,每个监测区域通过一个中心网关连接多个监测终端,形成多点采集的网络。终端设备之间的互相通信和数据多跳传输,确保了即使某些节点或链路发生故障,数据仍能通过其他路径传输到中心网关,极大地增强了网络的稳定性。这种高可靠性设计确保了在各种恶劣环境下,数据传输的稳定性和连续性,为大坝安全监测提供了坚实保障。
通过采用网状拓扑结构,本文构建的大坝变形监测系统不仅在通信条件受限的区域内提供了高效稳定的数据传输能力,而且极大地提升了整个监测系统的可靠性和灵活性。
1.3 多通道系统同步采集设计
在多通道传感器阵列同步采集设计中,为了应对传感节点数量众多和单块采集板通信负荷过大的问题,在设计中采用多条传感阵列配合多个采集板进行同步采集。由于每个采集板的物理性质差异(例如内部晶振、环境温度、湿度等)可能导致时间漂移,因此即使多个采集板在同一时刻开始工作,也难以确保长时间连续工作后仍能保持同步采集。
为了解决这一问题,设计了一种基于继电器的采集控制板。该控制板通过继电器对多个采集板进行启停控制,从而保证了数据采集的同步性。具体设计包括在每个采集板上安装高精度时钟模块,以减少时间漂移的影响,并在系统软件中加入时间校正算法,以进一步提高采集同步的精度。
通过采用这种多通道系统同步采集设计,能够有效协调多个采集板的工作,实现大规模传感器网络的数据同步采集,满足大坝沉降监测的高精度要求。图2中,Δt为采集板向各个传感器询问地址所要的时间,p为丢包率,丢包率为单位时间内不完整数据的占比。由图2中的曲线可知,随着采集板问询时间间隔增加,采集板获取的丢包率会先快速下降,后逐渐稳定,因此选择问询时间间隔在30ms、40ms为理想的问询时间间隔。
2 MEMS传感阵列设计
MEMS传感器阵列的硬件部分主要由六轴加速度模组、数据采集模组和降压模组组成。其中,MEMS 6轴传感器集成了高精度陀螺仪、加速度计和姿态分析功能,通过使用动力学解算与卡尔曼动态滤波算法,实现快速准确地分析传感器实时运动姿态的功能。
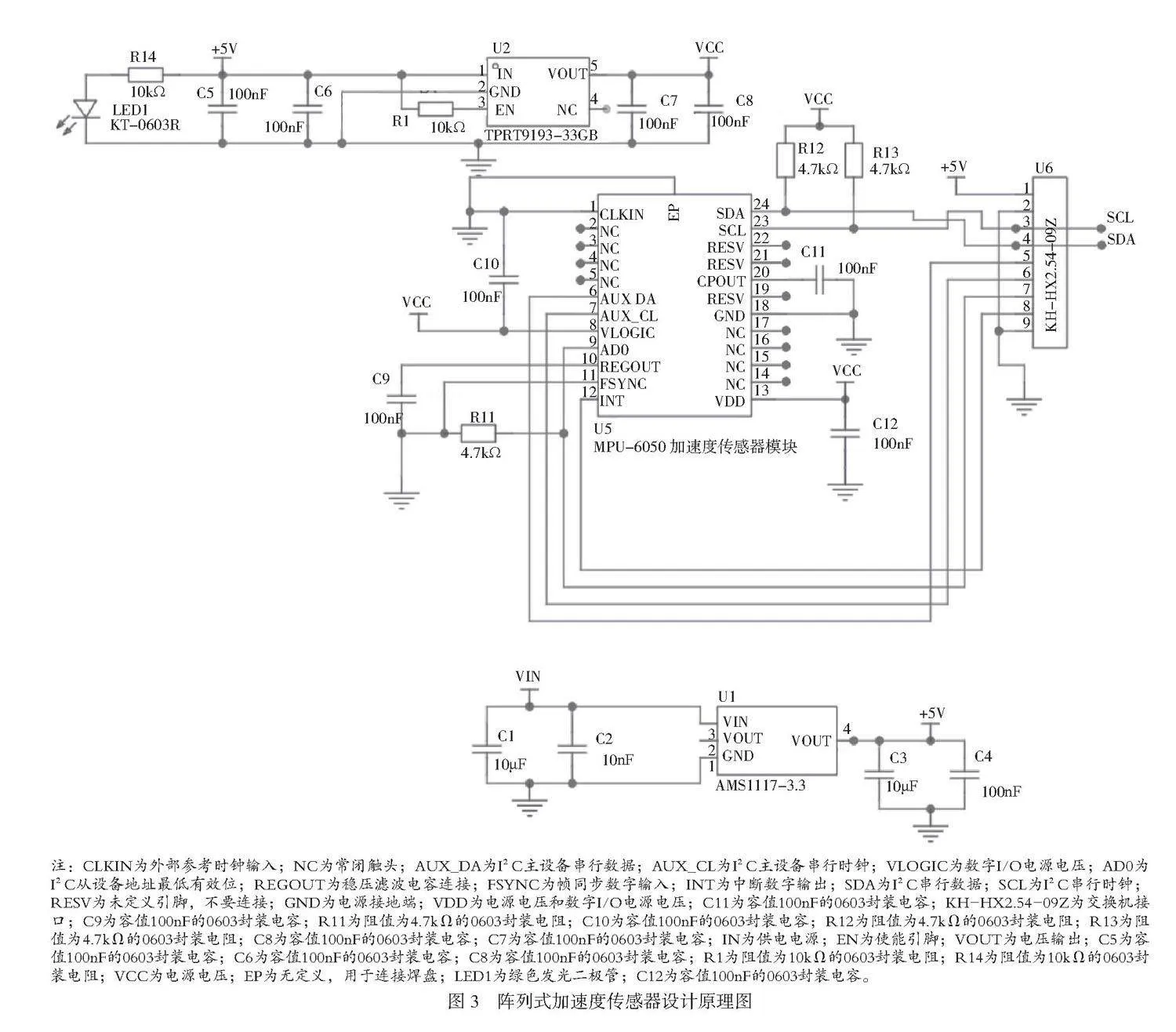
如图3所示,该电路设计了一个集成MEMS传感器和双降压管理电路的系统,用于大坝监测应用。传感器部分由MPU-6050六轴加速度模块组成,并通过STC32G12K单片机进行数据处理和传输。电路中的U2芯片(TPRT9193-33GB)用于提供3.3V稳压电源,确保传感器模块稳定工作。各个传感器节点通过RS485总线连接,实现可靠的数据通信。
传感器节点的电路设计包括多个去耦电容100nF(例如C5、C6、C7、C8、C9、C10、C11、C12),用于滤除电源中的高频噪声,确保信号的稳定性。数据采集板通过集成的STC32G12K单片机将采集的传感器数据通过RS485总线传输至上位机进行处理。上位机通过不断发送寻址指令,实现对各个传感器节点的实时数据采集和监控。为了防止用户出现电源接反等问题,在MEMS传感器旁添加了绿色发光二极管,当传感器工作正常时,发光二极管会正常工作,反之则会遏制电流通过。
为了确保系统电源的稳定性和可靠性,该设计采用了2套独立的降压管理电路。第一套电路基于TPRT9193-33GB,主要为传感器模块提供3.3V电源。第二套电路使用AMS1117-3.3稳压芯片,将输入电压降至3.3V,主要为其他辅助电路和数据采集单元供电。
双降压电路的设计提供了冗余机制,当其中一套电路失效时,另一套电路能够继续稳定供电,从而提高了整个系统的可靠性和抗干扰能力。通过这种双降压冗余设计和稳定的电源管理,整个大坝监测系统能够在复杂的环境下稳定运行,确保传感器数据的准确采集和传输,满足大坝沉降监测的需求。
3 基于传感阵列数据三维重构模型
通过采集MEMS传感器的各个姿态信息,获取传感器各个节点上的扭转角来确定节点上各个传感器的空间位置,并使用细分算法来拟合空间曲面的状态,从而三维重构出地形变形矢量模型,对三维被监测平面情况进行动态真实的显现,传感器之间的节点变形可以近似为圆弧。通过结合每个传感器节点的位置即由传感器的初始位置和变形之后的姿态角度决定,如公式(1)所示。
(1)
式中:θi为第i个传感器绕Y轴旋转的角度;xi和yi分别为传感器在X轴和Y轴上的坐标。
其中,第i段圆弧的半径为ri。当传感器节点之间圆心角角度不为0°时,圆心Ci在以Pi为原点的坐标表示为[0.0.ri]T,则有Pi+1在以Pi为原点的坐标系中的坐标如公式(2)所示。
Pi+1=[risin(ai),0,ri-ricos(ai)]T (2)
式中:Pi为第i个传感器的位置坐标;ri为第i段圆弧的半径;ai为第i段圆弧的圆心角。
通过上述公式可以计算每个传感器节点在三维空间中的位置。
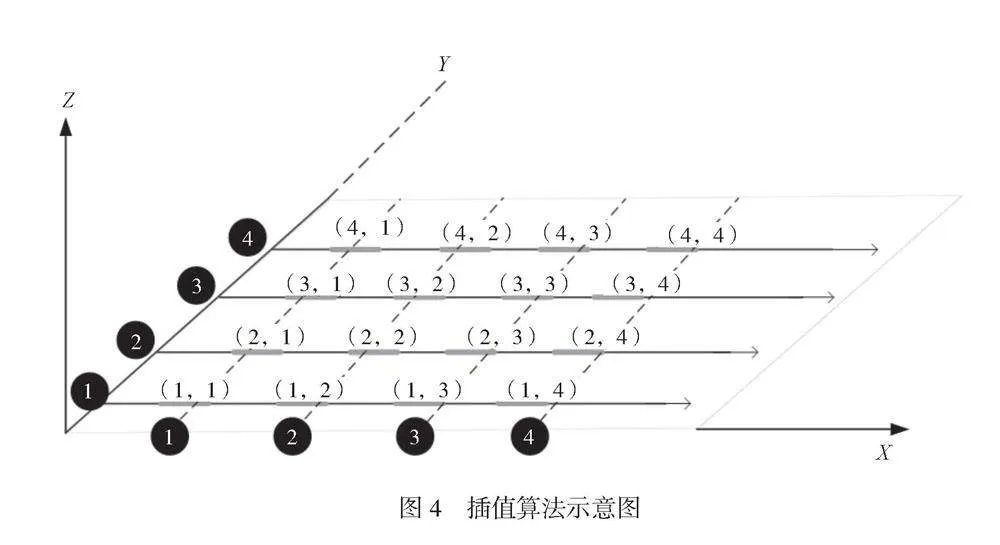
在获取了各个传感器节点的空间位置后,通过插值算法来计算监测区的地形变化。这些区域被4组互相平行、排成1行的传感器阵列分成不同的区块。在该区域内,4组相互平行且排成1列的传感器阵列将其划分为若干不同的段落,每一段的界限由2组传感器阵列确定。利用这些阵列以及对区域内其他点的插值计算。如图4所示,通过算法处理,相邻的传感器阵列能够重构出每个正方形区块的地形变化量。采用这种方法,可以对余下的区域进行相似的计算处理。并且通过细分算法处理后,生成一个连续的曲面模型,进而构建大坝沉降部分的三维变形向量模型。
在三维变形向量模型中,传感器节点的姿态变化数值是通过将当前测量的姿态角度与初始位置的姿态角度进行比较得出的。具体来说,通过计算传感器在X、Y和Z轴上的偏转角度,结合细分算法对空间内其他区域进行插值处理,实现对监测区内地形变化的三维重建。
具体操作如下:通过确定网格、添加新点、连接新点等步骤,从而获取经过细分的正方形网格。其中,h为平面的形变量,通过判断h的正负值来判断被测物体平面沉降和抬升,其中hgt;0表示被测平面发生隆起,hlt;0表示被测平面发生沉降,其中大坝沉降监测区域的表面形变量如公式(3)所示。
(3)
式中:h为被测区域的形变量;i为x坐标轴传感器编号;j为y坐标轴传感器编号;h(0,0)为坐标轴原点。
4 试验与讨论
4.1 传感阵列性能测试试验
MEMS传感阵列监测分辨率测试过程如下:首先,将传感阵列平铺在地面上,加速度传感器面朝上,通过夹具和平台固定各个节点,调整传感器的姿态角。为了模拟不同的沉降形态,将4条传感器阵列分别构造成不同的形状。每个传感器节点通过RS485总线将采集的角加速度数据传输到终端设备。终端设备内置了LoRa通信模块,这些模块负责通过LoRa网络将收集到的数据传输到网关。网关作为数据汇聚点,接收并整合来自多个终端设备的数据,并通过蜂窝网络将这些数据上传到云端服务器。在云端服务器中,采集的角加速度会被进一步处理和保存。研究人员可以远程访问这些数据,并使用MATLAB软件进行详细分析。通过MATLAB重构被监测区域的三维形状,并将结果显示在屏幕上,同时保存图像。
4.2 沉降模拟监测试验
为了模拟大坝沉降的真实环境,在实验室中搭建了3m×3m的混凝土平面,并在平面上布设了4条MEMS传感器阵列,使其紧贴混凝土表面,用于监测混凝土表面的地形变化,地形三维重构图如图5所示。整体地形变形变量较小。
5 结语
本文主要设计了基于MEMS加速度传感器阵列的大坝沉降监测技术和装置,提出了一种使用拨码器形式区分传感器ID编号并可以实现同步多个传感器数据采集技术的方法,通过LoRA无线传输模组将RS485总线传输数据上传到网关,并对数据进行插值计算和变形重构,获得大坝的矢量沉降模型,与传统的传感器监测技术相比,该方法可以实现大坝的长期沉降监测分析以及高精度测量,并且能够获取大坝的三维沉降图层。在试验理想环境中进行测试,验证该方案能够实现地形监测的任务。下一步将研究如何提升系统的稳定性和可靠性,争取在大坝沉降监测中开展并投入实际的使用环境中。
参考文献
[1]毛良明,施海莹.新型步进电机式大坝变形自动监测仪器[J].传感器与微系统,2006(4):55-57.
[2]李文龙.MEMS传感器应用于边坡监测技术研究[J].地下水,2023,45(6):159-160,181.
[3]徐建强,杨建国,阎宗岭等.公路边坡危岩智能安全监测及现场灾害报警技术[J].土工基础,2017,31(2):240-243.
[4]陈娟,徐蒙,周怡,等. 大坝廊道无线传感器网络节点布局优化 [J].传感器与微系统, 2019, 38 (9): 53-56,59.
[5]乔静,褚金奎,缪新颖,等. 用于大坝安全监测的长距离WSNs节点设计[J].传感器与微系统, 2012, 31(5):104-106,114.
