自动扶梯附加制动器工作原理和制停距离分析
2024-12-10郭启

摘 要:附加制动器是自动扶梯中重要的安全保护装置,设置目的是即使主制动器失效,附加制动器也能让自动扶梯安全制停。在现行标准中,对附加制动器制停的距离没有规定,但附加制动器的制动距离对自动扶梯的安全至关重要。本文根据附加制动器设置条件、附加制动器的工作原理分析了自动扶梯附加制动器动作规格,提出附加制动器制动距离的计算方法,解决日常检验对附加制动器的制动距离判定具有指导意义。
关键词:自动扶梯;附加制动器;制动距离
中图分类号:TU 857" " " 文献标志码:A
目前,随着我国各大城市基建项目的发展,公共交通中自动扶梯的数量呈现快速增长趋势。自动扶梯安装能够最大程度地方便人们出行,但设备故障事件频发,因此社会各界深切关注其安全性能。多年来自动扶梯事故的共同特征是上行自动扶梯出现非操纵逆转,而本应起到保护作用的附加制动器却未能及时响应或有效制停,导致乘客失去平衡并滚落,造成安全事故。因此,对从事自动扶梯相关工作的专业人员来说,应深入研究自动扶梯附加制动器的工作原理,并仔细研究其制动效能。
1 附加制动器的设置条件
工作制动器与梯级、踏板或胶带驱动装置之间不是用轴、齿轮、多排链条或多根单排链条连接的;工作制动器不是规定的机-电式制动器;提升高度大于6m;公共交通型自动扶梯。
2 附加制动器的工作原理
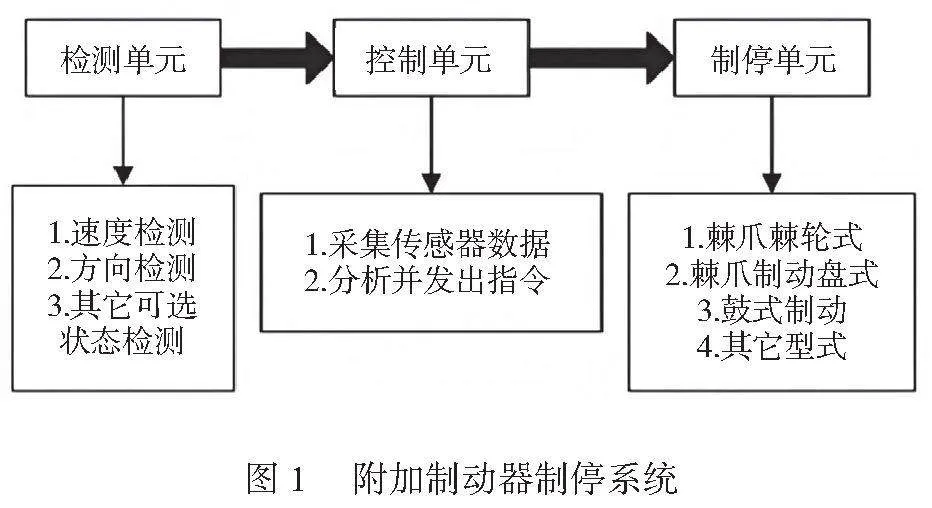
实现自动扶梯附加制动器制停系统,一般会使用可编程电子安全相关系统,如图1所示。
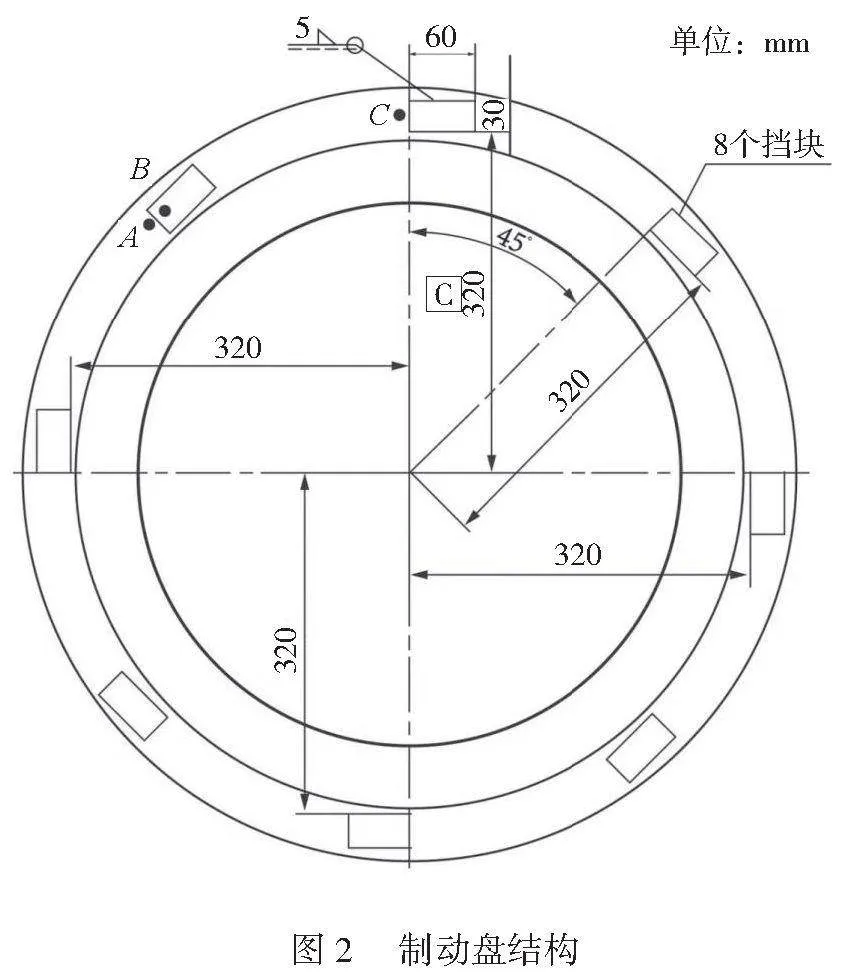
在这个配置中,为保障自动扶梯的运行安全,专门设置了检测单元。此外,根据不同需求,还可为其设置多种非正常停机触发机制,例如供电系统失电、安全电路失电、工作制动器松闸故障等情形。在系统中,控制单元发挥着至关重要的作用。一旦系统检测到超速或逆转情况,控制单元系统就会迅速启动附加制动器,保障乘客和设备的安全。对其他的故障来说,系统则倾向于选择延迟触发,避免不必要的紧急制动影响乘客的乘坐体验。制停单元是保障自动扶梯安全运行的最后一道防线,它通常采用棘轮与棘爪相结合的机械结构,当触发动作发生时,原本保持棘爪复位的电磁铁会失去作用,此时压缩弹簧的弹力会将棘爪推向制动盘,与制动盘上的撞块发生碰撞。
制动盘的设计特色是8个均匀设置的挡块(图2)。当附加制动器启动时,棘爪会随机与制动盘圆周上的任意点发生接触。考虑到自动扶梯下行时,制动盘会以逆时针方向旋转,若棘爪恰好处于A点,则其制停距离最短。如果棘爪与B点接触,那么它将在下一个挡块,即C点处,经历一次冲击式制停,此时制停距离最长[1]。从上述分析中发现,制动盘(棘轮)结构中的附加制动器在制停距离上表现出了显著的随机性。特别是当A点触发时,满足制停的要求非常困难。为了解决这个问题,尝试通过调整制动盘上的碟形弹簧满足制停的条件。
3 附加制动器动作动作规格设置
在日常检验中需要注意两种特殊情况:在自动扶梯的运作速度达到其额定速度的1.4倍临界值前;如果梯级、踏板或是胶带出现与原先设定的运行方向不一致的变动时需要及时作出反应。
附加制动器的动作应与速度监控、断链监控、扶手带运行监控、驱动链运行监控等共同进行判断和控制。从自动扶梯安全运行的角度考虑,附加制动器的动作规格应按以下3种情况进行设置。
3.1 附加制动器不动作,主制动器动作的条件
自动扶梯在超过额定速度的1.2倍前应自动停车,因此当超速至1.15倍额定速度时设置主制动器动作,当安全回路发生故障时,用钥匙开关、急停开关、控制室的停止按钮停止,主制动器线圈断线。
3.2 附加制动器和主制动器同时动作的条件
自动扶梯在超过额定速度的1.4倍前附加制动器必须动作,因此当超速至1.3倍额定速度时设置附加制动器动作。但是当自动扶梯超速至1.15倍额定速度时,主制动器已经动作,因此除非主制动器破损,否则不会达到额定速度的1.3倍。
3.3 附加制动器单独动作,主制动器不动作的条件
当驱动链断裂或主制动器失效时,主制动器不能对自动扶梯产生有效的制动力矩,这时只能采用附加制动器对自动扶梯进行制停。
4 附加制动器制动距离
最新的现有检验规程仅仅提出了工作制动器的制停距离的具体要求,而没有提出附加制动器动作时制停距离的要求,为了确定检验中附加制动器制停距离的具体计算方式。分析上述附加制动器动作规格的3种情况设置可知,附加制动器不动作和主制动器动作的状态是通过制停驱动主机来完成自动扶梯最终的制停的,制动距离按主制动器制动进行计算即可。对梯级意外逆转的状态来说,梯级在逆转前速度肯定会降为零,而附加制动器在梯级速度降为零前已开始提供制动力矩。由于梯级速度为零,可以忽略乘客载荷及梯级自重等的冲击,再加上主制动器会同时动作,因此从逆行的瞬间起计算的制动距离大致为零,在这种状态下,可以对自动扶梯进行有效制停[2]。根据以上分析,在检验过程中附加制动器制动距离的计算主要考虑主、附制动器同时制动以及附加制动器单独制动的情况即可。
4.1 主、附制动器同时动作时制动距离
按照上述附加制动器动作规格的设置,主、附制动器同时制动有电力异常和超速至1.3倍额定速度两种情况。当电力异常(停电)时,自动扶梯处于额定速度,这时的制动距离肯定比超速至1.3倍额定速度的距离短,在这种情况下,当超速至1.3倍额定速度时制动距离最长,因此主、附制动器同时动作的制动距离按超速至1.3倍额定速度进行计算即可。制停距离的计算过程如公式(1)所示。
4.2 附加制动器单独动作时制动距离
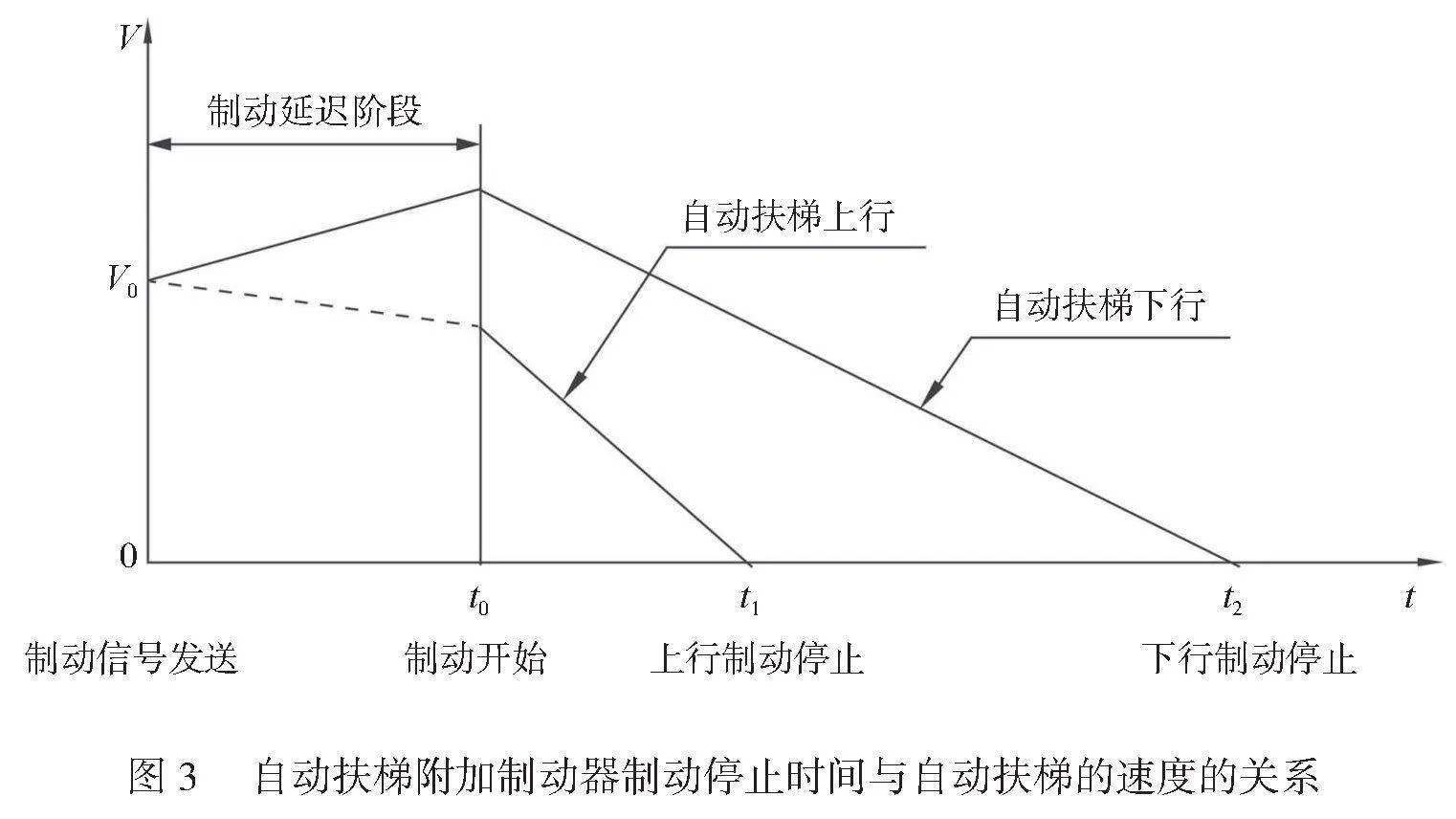
当驱动链断裂或主制动器失效时附加制动器单独制动,自动扶梯的停止时间与自动扶梯的速度的关系如图3所示。
制动过程:当自动扶梯上行时,控制系统向附加制动器发出制动信号,但制动有一个延迟时间t0,在制动延迟阶段,自动扶梯在摩擦力矩及乘客载荷等力矩的作用下进行减速,直到附加制动器开始制动,最终用更大的减速度制停。
当自动扶梯下行时,控制系统向附加制动器发出制动信号,制动有一个延迟时间t0,在制动延迟阶段,自动扶梯在乘客载荷等力矩作用下进行加速,直到附加制动器开始制动,最后减速停止。
附加制动器单独动作时制停距离的计算过程如公式(2)所示。
4.3 附加制动器制动距离分析
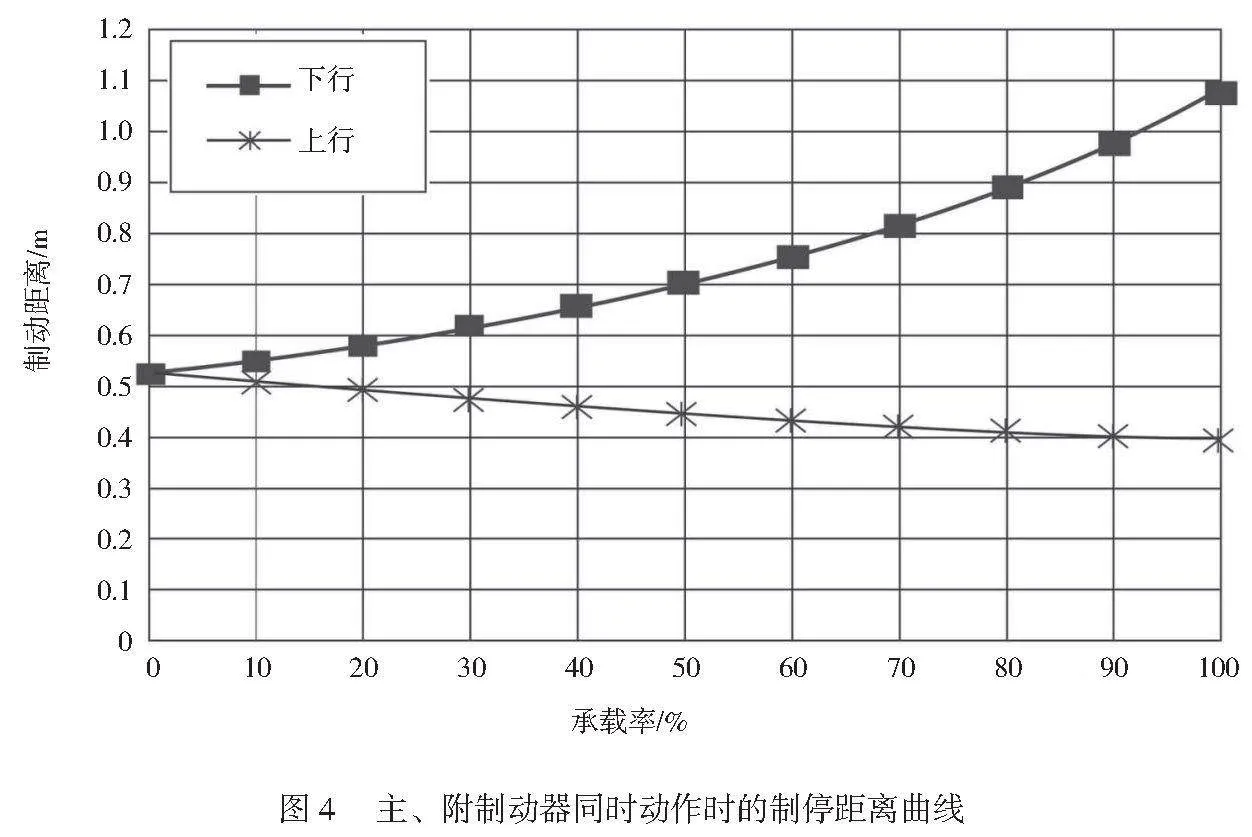
通过不同的乘载率在主、附制动器同时动作和附加制动器单独动作,分别绘制图4、图5,可以直观看出附加制动器的制动距离。制动距离的大小直接影响自动扶梯制动时的制停减速度,如果制停减速度过大会对设备或者乘客造成伤害[2]。
从图4、图5制动距离曲线可以看出,下行制动距离随乘载率增加而增加,上行制动距离随乘载率增加而缩短。当附加制动器为双向制动结构时(可上行、下行制动),空载制动距离几乎相同。但是,当附加制动器为单向制动的棘轮棘爪式结构时,上行过程中附加制动器虽然已动作,但此时还不能提供制动力矩,这时是主制动器单独对自动扶梯进行制动,直到梯级速度为零。从制动距离计算分析可知,自动扶梯最长的制动距离发生在自动扶梯满载下行的过程中,最短的制动距离发生在自动扶梯满载上行的过程中。
5 结语
附加制动器对自动扶梯非常重要,虽然现有的标准、检验规程并无关于附加制动器的制动距离的规定,但为了保障乘客的乘梯安全,也要对附加制动器的动作规格进行周密分析与设置,并对制动距离进行计算。而且,为使自动扶梯满载下行时能有效制停,需要提供足够的制动力矩。自动扶梯提升高度越高,要求提供的制动力矩就越大;而制动力矩越大,空载时的制动冲击也越大。因此,在这种情况下,对制动距离和制动加速度进行计算非常重要,如果制动冲击太大的话,那么可以考虑采用多段型的附加制动器,按时间差调整制动力矩以减少制动冲击并实现安全制停。
参考文献
[1]从继庆,徐洲,唐峰. 自动扶梯附加制动器制动过程数值仿真方法[J]. 中国电梯,2024,35(1):5-9.
[2]季广伟. 浅谈自动扶梯附加制动器与制停距离[J]. 中国电梯,2018,29(17):60-62.
