多视图像多角度真正射影像的生成方法研究
2024-12-10胡志刚


摘 要:为了提升遥感影像在地理信息获取和环境监测等领域的应用效果,本文提出了多视图像多角度真正射影像的生成方法,详细分析了多角度多视影像真正射纠正的数据预处理过程,包括影像去重、大气校正、波段增强、几何校正以及正射校正等步骤,以保证影像数据的准确性和一致性。同时,本文设计了遮挡检测算法,以有效识别并处理影像生成过程中可能出现的遮挡区域,并在此基础上对遮挡区域进行信息补偿。最终,本文基于特征融合和优化的真正射影像生成算法,成功生成了高质量的多角度多视影像真正射影像。研究结果表明,本文提出的方法能够有效处理多视图像,生成具有高精度、高清晰度和丰富纹理信息的真正射影像,可为后续的地理信息提取和地物识别提供有力支持。
关键词:多视图像;多角度;真正射影像
中图分类号:P 23" " " " 文献标志码:A
在现有的研究中,多视图像真正射影像的生成方法主要包括基于几何变换的方法、基于插值的方法以及基于深度学习的方法等。然而,这些方法在处理多视图像过程中通常存在计算量大、精度不高和鲁棒性差等问题[1]。此外,由于多视图像拍摄角度具有多样性,因此如何有效融合不同角度的信息,生成高质量的真正射影像,也是目前研究面临的重要挑战。
针对上述问题,本文探索了一种高效、准确的多视图像多角度真正射影像生成方法,对多视图像的几何特性、光照特性以及纹理特性进行深入研究,提出了一种基于特征融合和优化的真正射影像生成算法。该算法能够充分利用多视图像信息,有效消除投影误差,提高影像质量[2],并优化算法的计算过程,降低计算量,提高处理效率。
1 多角度多视影像真正射纠正数据预处理
航拍图像中正多边形房屋通常具有倾斜角,当房屋数量太多且有高层房屋遮挡时,会给精确测量带来困难,并影响建模效率。真正射纠正数据预处理是遥感影像处理中的关键步骤,旨在消除地形起伏和传感器等因素引起的影像变形,生成具有准确地理信息的正射影像。
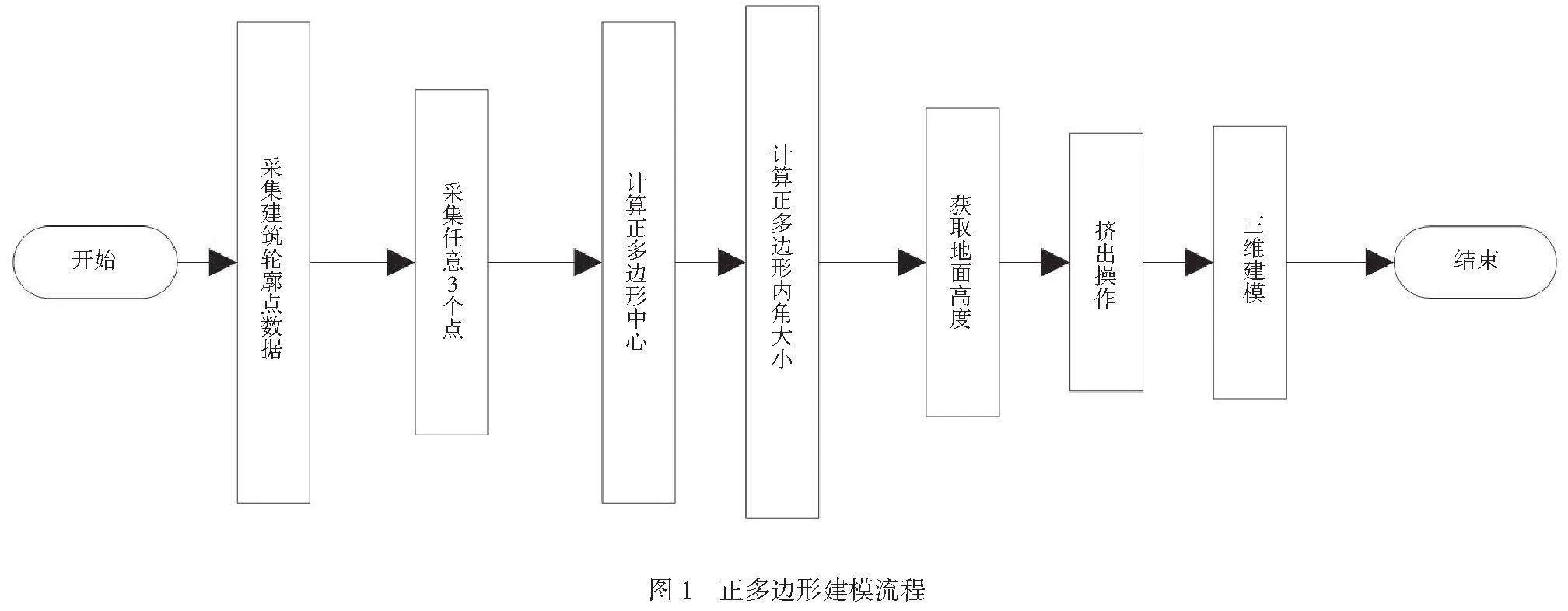
当对多面体建筑物进行测量时,理论上需要对每个角进行手工测量,如果角点处数目太多、图像上的分角点相互遮挡或图像分辨率较低,就会给测量人员带来负担,影响测量精度,数据运算的频繁处理也会降低建模效率[3]。本文方法仅需要对房屋的3个角点进行测量,求出顶点位置,然后根据顶点个数来确定三角形内角位置,并用边的个数来决定三角形内角的夹角,从而得到建筑外形。再测量房屋周围的地上点,计算房屋高度,最终实现对房屋的挤压[4]。正多边形建模流程如图1所示。
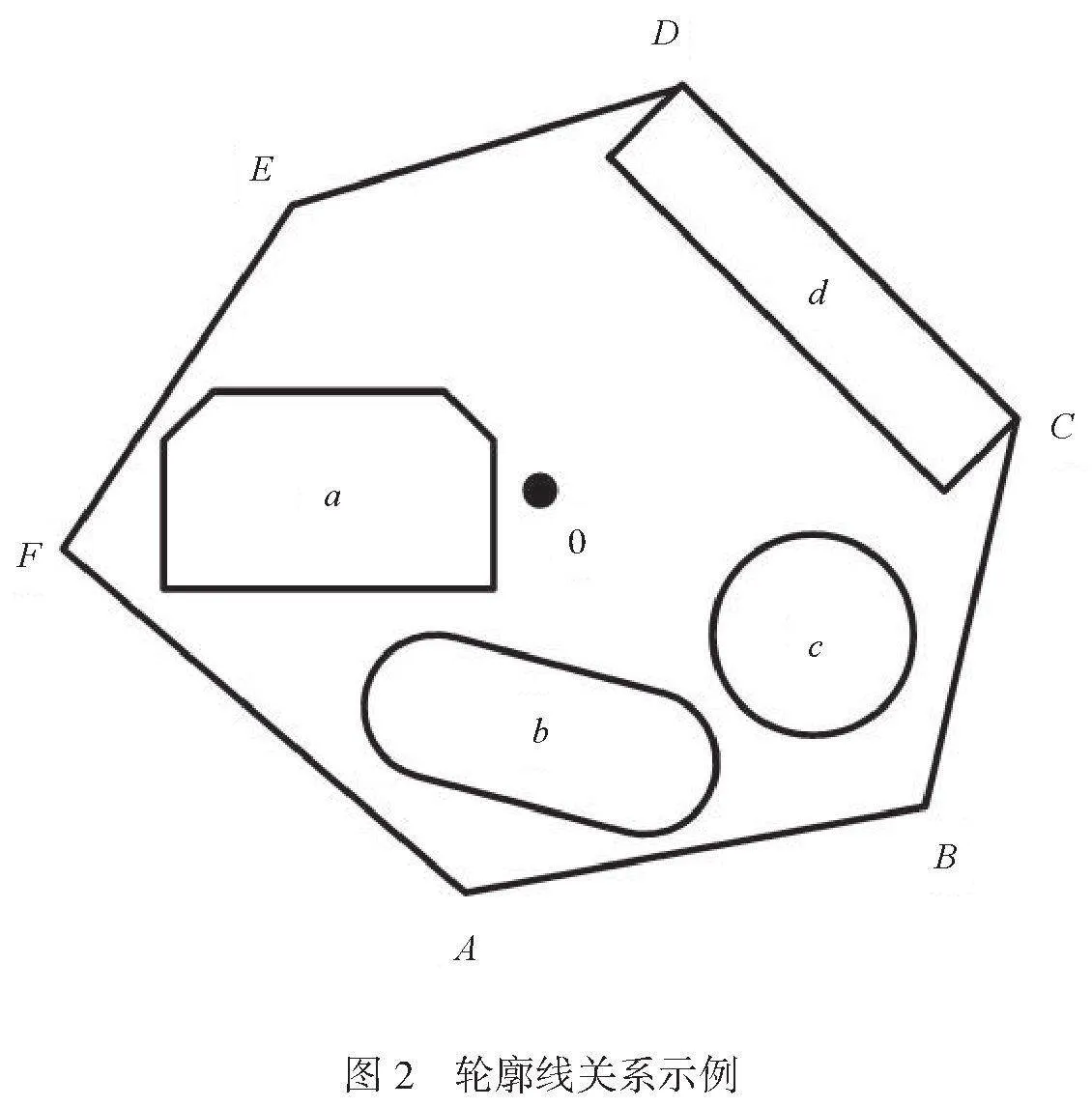
本文在对镂空形建筑物建模过程中,结合3Ds Max建模规则,提出一种基于样条的建筑物外、内等高线同时测量的方法,即对建筑物外、内等高线进行一次测量,从而对建筑物、建筑物等进行高精度三维建模,解决了传统3Ds Max测量方法不精确带来的布尔操作偏差问题。该算法的基本思路如下所述。首先,在图像处理中,每一个特征线上的顶点都是关键的数据点,它们能够精确描述建筑的外形和内部结构。以点Pk为例,它是第k个特征线的顶点,包括该特征线在这个位置上的关键信息[5]。同时,将行[i]作为第i个特征线上的第j个顶点,按照某种顺序或逻辑将这些顶点有序地串联起来,从而形成完整的特征线。其次,轮廓线关系示例如图2所示,提取出这些特征线就可以进一步定义和识别建筑的外轮廓线和内轮廓线。图2中的A、B、C、D、E和F点连接构成的直线表示建筑的外轮廓线,描述了建筑物外部的边界形状。而a、b、c和d点则表示内轮廓线,反映了建筑内部的某个区域或结构。这些轮廓线的存在不仅有助于更好地理解建筑结构,还为后续的地理空间分析提供了重要依据。再次,在保证等距不相交的情况下,求出各内轮廓线的中心位置,并求出各轮廓线的唯一中心点O。最后,根据轮廓线获得唯一中心点,在3Ds Max平台上构建镂空形建筑物[6]。
在明确不同形状建筑的建模流程后,利用纹理映射得到测区三维模型。假设X和Y分别为纹理对象的横坐标和纵坐标,那么每个纹理对象的计算过程如公式(1)所示。
式中:x1、y1为模型顶点对应图像坐标;x2、y2为切割长方形左上部图像坐标;width为切割矩形像素宽度;height为裁切矩形像素高;w为切割长方形长度;h为切割长方形的宽度。
将纹理映射数据进行自动裁切,将其存储为2个平方的n阶幂.jpg文件,从而解决与增强图像的兼容性问题,实现跨平台共享,同时克服现有模型在不同平台的兼容性问题。
2 遮挡检测算法设计
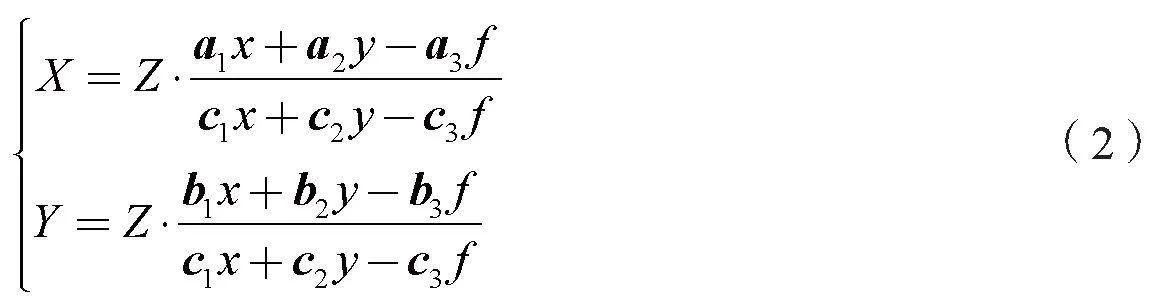
多视图像多角度真正射影像的生成方法研究是遥感技术与摄影测量领域的一个核心议题。真正射影像的生成旨在消除地形起伏带来的投影差,使影像呈现出类似垂直摄影的视觉效果。遮挡检测算法设计是真正射影像生成过程中的关键环节。遮挡现象在山区、城市等复杂地形中比较常见,给影像的完整性和准确性带来了挑战。因此,开发高效的遮挡检测算法对提升真正射影像的质量至关重要。在遮挡检测算法设计中,可以利用相关参数,例如地形高度、坡度和视角等,建立对应的镜像方程,并模拟光线传播过程[7]。这些方程能够描述光线在不同角度和地形条件下的传播路径,据此可判断哪些区域可能被遮挡,并采用特定的数字模型进行遮挡检测。这些模型可以利用几何光学原理或机器学习算法,对图像进行数值运算和点解算,识别潜在的遮挡区域。能够充分利用图像的像素信息、纹理特征以及上、下文关系,提高遮挡检测的准确性。在真正射影像的生成过程中,结合数字式差动校正消除原始图像中的畸变和误差,使图像更接近真实场景。数字式差动校正分为直接式、插入式以及直接式与间接式组合等多种方式。直接式校正以直接对图像进行数值运算来消除畸变,插入式校正可以利用插值算法来填补图像中的空白区域,将直接式与间接式校正方法组合使用可以进一步提高校正的精度和效率。本文采用直接式方法,从原始影像的像点p(x,y)出发,按照顺序求解每个原始像素点在纠正影响中的正确位置坐标P(X,Y),在航空摄影测量的过程中,其直接解算式如公式(2)所示。
式中:a1、a2和a3分别为由角元素构成的旋转矩阵;b1、b2和b3分别为由角元素构成的平移矩阵;c1、c2、c3分别为线性变换矩阵;Z为高程,可由DEM内插求解;f为纠正系数。
由于真正射影图像的质量和模型的精细化程度有紧密联系,因此,在城区遮挡区域检测中,采用矢量建筑模型比采用栅格建筑模型对遮挡区域的识别精度更高。用栅格表示地形的数字地面模型,用矢量表示建筑数字地面模型。新方法适合于城区地势较平坦的城区,但是当地势较高时,易发生迭代次数过多,导致算法效率降低。
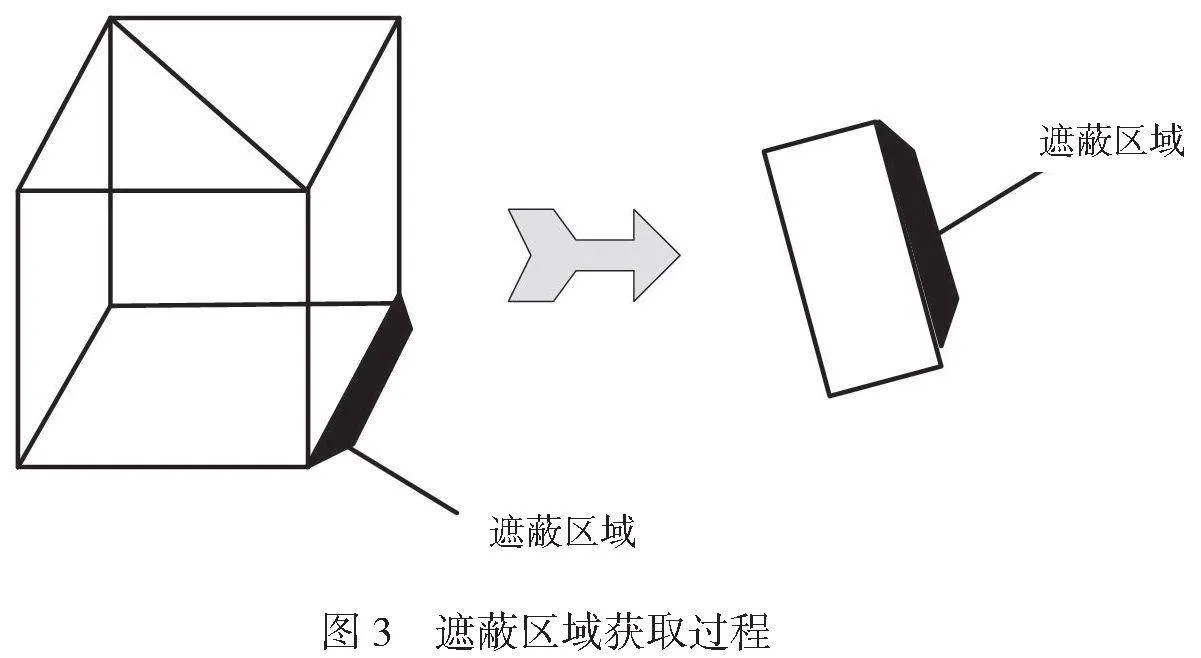
在真正射影像生成中,遮蔽区域检测耗时较长,对计算机内存的要求较高。因此,在实际应用中应结合数字城市几何模型的范围,将遮挡检测生成控制在合理区域范围内,达到降低资源消耗的目的。遮蔽区域获取过程如图3所示。
3 遮挡区域信息补偿与真正射影像生成
完成遮挡区域的探测过程后可得到每个图像所对应的遮蔽区域,进而对遮蔽区域面积进行信息补偿。本文针对航拍图像存在多视角、高交叠等特点,根据航拍图像间的重叠特征,选取与之相匹配的邻近图像进行遮挡,从而获得包括遮挡信息的真实航拍图像[8]。
将航拍图像反向投影城市模型,进行遮挡区域提取。针对遮挡区域信息,以减少高差偏移、减少相邻遮挡区域图像颜色不一致性为目标,对每幅图像的权重图像进行加权处理,从遮挡区域多幅航拍图像中选取最大选项值图像来填充遮挡区域。
当航拍图像具有多个角度和侧向重叠程度较高时,可以在多张相邻图像上同时获得遮挡区域。在此背景下,最有效的方式就是利用邻近航线和侧向图像中的可见光图像来弥补被遮挡区域的纹理信息。本文拟将被补偿的正投影图像称为“主像”,被补偿的原始图像称为“次图像”,其补偿原理如下:选择与遮挡最接近的“背景点”对应的子图像,当建筑密度较大时,如果使用相邻图像的叠加信息无法完全弥补遮挡区域,就可以采用其他纹理修补技术,以保证图像的完整性。
在此基础上,采用最小视点原理,即物体拍摄方向和投影中心铅垂线间的角度来填充遮挡区域内的缺损信息。当视野较小时,所选取的可视像素点的可用度也较高。视角大小选择影像示意图如图4所示。
根据最小角度选取原理,将角度最小的C点作为遮挡点,并进行填充。
综上所述,如果利用邻近航摄图像对遮挡区域进行补偿,就需要使被填充区域在其他图像上可见。当生成真实投影图像时,将被遮挡区域像素的颜色值赋予为黑色,这样在对遮挡区域进行纹理修复过程中仅需要对已标注的像素做相应处理即可。如果被标注的像素不是遮挡区域,就保持原始图像的颜色值。本文没有对真实图像进行图像增强,因此采用最少张数的影像,得到包括完整图像信息的正射影像,以降低遮挡区域由多幅航空影像拼接造成的图像色差。图像填充的方法为手工方法,将航空影像按照顺序排列,逐个填充遮挡区域。
一般情况下,当使用邻近航拍影像填充遮挡区域时,需要先提取遮挡区域,再用索引矩阵标注遮挡区域。多视角、高重叠率的影像是一种非常适合邻近像素补偿的方法。当多幅影像同时含有被遮挡的图像时,需要选取适当的影像进行补偿。通常将被修复的图像称为主要图像,将被遮盖区域进行纹理修复的图像称为副图像,进而可联合主图像和辅助图像的来形成真实图像。
真实图像拼接所使用的图像通常存在一定交叠。当获取多视角多视点图像时,受外界环境和硬件条件的限制,除了不同图像区域的有颜色深浅、曝光强弱外,同一图像区域内的对比也有所差异。例如,同一幅影像在不同区域会出现不同色调,迎光面会偏明亮,背光面会黯淡。一般来说,影像的像主点附近色彩饱和度较高,而影像边缘部分则色差明显、变形较大。
光线强度、气象条件、雾霾、云烟、航摄时段和相机自身等多种因素的影响,会使真实影像拼接结果出现色彩不均衡现象,导致真正影像的颜色缺乏一致性,直接影响真正射像的视觉质量,进而影响后期图像的地物辨别和多领域服务应用。因此对影像的匀光、匀色和色彩库进行协调匹配、优化处理,不仅能改进图像质量,还能提升图像的精度和美感。
4 结论
本文对多视图像多角度真正射影像的生成方法进行了深入研究,提出了一种基于特征融合和优化的算法。该算法能够有效融合多视图像的信息,消除投影差,生成高质量的真正射影像。试验结果表明,该算法在处理多视图像过程中具有较高的精度和鲁棒性,能够满足实际应用需求。
然而,本文的研究仍存在一定局限性。首先,算法的处理效率有待进一步提高,以应对大规模多视图像的处理需求。其次,在处理复杂地形和地物过程中,该算法可能会受一定程度的影响,需要进一步优化算法以提高适应性。未来将继续研究多视图像的处理技术,探索更高效、准确的真正射影像生成方法,为遥感影像的应用提供更丰富的信息支持。
参考文献
[1]周勇,张旺,黄琦峻.真正射影像制作技术的新发展及生产实践[J].测绘技术装备,2023,25(4):85-89.
[2]贺艳花.基于无人机图像生成高精度真正射影像图研究[J].科技资讯,2023,21(21):25-28.
[3]胡玉新,王峰,焦念刚,等.面向目标结构信息保持的SAR真正射遥感影像生成方法[J].电子与信息学报,2023,45(10):3767-3775.
[4]王延正,周晓峰,张明哲.基于INPHO软件的真正射影像生产研究[J].科技与创新,2023(15):112-114,118.
[5]邓继伟.基于高精度真正射影像的铁路既有线岔心测量方法[J].中国铁道科学,2023,44(2):24-31.
[6]唐乾坤,陈晔,杨正银,等.真正射影像制作中遮蔽区域修复算法[J].测绘,2023,46(1):18-22.
[7]徐柳华,沈彩莲,马旭文,等.真正射影像建筑物遮蔽区域信息分析与提取[J].测绘与空间地理信息,2022,45(9):44-46.
[8]张春森,葛英伟,郭丙轩,等.无人机影像DSM自动生成随机传播COLVLL算法[J].测绘学报,2022,51(11):2346-2354.
