基于虚拟磁链的变系数降频模型预测控制
2024-12-10张泽余枫枫






摘 要:在三相并网逆变器中,定系数降频模型预测直接功率控制(FCFRMPDCP)解决了系统的开关频率问题,但是难以确定其中的参数,导致系统输出的功率不稳定。为了降低开关频率并保证系统的稳定性,本文提出一种变系数降频模型预测直接功率控制(VCFRMPDCP)策略。该策略优化了系统参数并引入虚拟磁链方法,无须使用交流电压传感器,降低了系统的硬件成本,在一定程度上解决了电网谐波和频率突变问题。本文搭建三相逆变器的系统模型,采用MATLAB进行仿真,使用变系数降频模型对直接功率进行预测控制,验证其在稳定功率和降低开关频率方面的有效性。
关键词:直接功率控制;降频;虚拟磁链;变系数
中图分类号:TM 46" " " 文献标志码:A
随着太阳能等清洁能源的快速发展,并网逆变器作为分布式发电和电网的接口设备得到广泛使用[1]。与传统的直接功率控制相比,模型预测直接功率控制策略须选取未来的状态矢量,其矢量选择方式更加精准、有效,输出的功率脉动更小。虽然矢量预选控制降低了开关损耗,但是运算量较大,过程烦琐。在模型预测控制中,为降低开关频率,一般在代价函数中增加开关动作次数的开关函数项[2]。文献[3]提出在降频模型中加入功率补偿,稳定了功率波动。文献[4]采用虚拟磁链作为改进环节,不使用电压传感器,降低硬件成本。文献[5]采用虚拟磁链作为改进环节,省去电压传感器,降低硬件成本。文献[6]在有功电流的调节过程中结合虚拟磁链微分负反馈,优化了系统的虚拟磁链振荡情况。
本文提出一种将虚拟磁链技术与变系数降频控制相结合的改进方法。将三者进行仿真对比,验证变系数降频模型预测直接功率控制(Variable Coefficient and Frequency Reduction
for Model Predictive Direct Power Control,VCFRMPDCP)策略,降低了系统开关频率和硬件成本,使跟踪系统功率波动稳定,提升了系统的调节性能。
1 基于虚拟磁链的MPDPC策略
基于虚拟磁链的模型预测直接功率控制MPDPC(Model
Predictive Direct Power Control)策略结构如图1所示。
先对电网电流进行采样,计算得到电网电压矢量θ。在坐标系中,计算虚拟磁链估计和瞬时功率,并推导电网电压在α、β轴中的分量eα、eβ和实际的瞬时有功、无功功率值。将参考的有功和无功功率值输入模型预测算法中,在8个电压矢量的作用下,计算下一个时刻的功率预测值。结合给定的直流电压值,PI控制生成系统的有功功率给定值,PI控制是一种滞后校正方式,其将比例控制与积分控制结合,对控制系统的输出进行调节,使其更加稳定、准确。一般无功功率参考值可以预先直接确定。当系统处于平衡状态时,系统响应速度较快,降低了系统的硬件成本。常见的考虑功率波动因素的代价函数如公式(1)所示。
F=|pk+pk+1|+|qk-qk+1|" " " " " " " (1)
式中:F为代价函数;pk为当前时刻有功功率;pk+1为下一个时刻有功功率;qk为当前时刻无功功率;qk+1为下一个时刻无功功率。
在α、β坐标系中,结合并网逆变器的数学模型,当三相电网电压处于平衡状态中时,根据瞬时无功理论得到系统输出的无功功率和有功功率P和Q。其虚拟磁链矢量ψ在α、β轴中的分量为 ψα、ψβ,计算得到虚拟磁链的幅值ψm。同理得到电网电压矢量E在两相静止α、β坐标系中的表达式。根据虚拟磁链的电网电压矢量角度进行估算,得到系统交流侧的输出电压方程式。为了估算电网电压频率,将输入电压与输出的电压误差信号作为新的输入,电网电压估计频率作为输出。根据虚拟磁链矢量角度计算电网电压矢量。结合频率自适应滤波器,采用系统虚拟磁链估算方法,系统磁链偏移量较小,避免使用交流传感器,响应速度较快,降低了系统的硬件成本。
2 基于虚拟磁链的FCFRMPDCP策略
当系统逆变器运行稳定时引入开关动作函数,考虑系统功率开关管动作次数,优化代价函数,其结果如公式(2)所示。
式中:N为动作函数;Sik+1和Sik分别为下一个时刻预测和此刻状态下的某个桥臂开关管状态,i=a,b,c为三相电流。在基于虚拟磁链的模型预测直接功率控制中,由于在虚拟磁链的估算和开关动作函数中都包括Sik+1和Sik,存在耦合性,因此设计新的开关动作函数N',如公式(3)所示。
式中:Sak+1为a相的k+1时刻开关管状态;Sak为a相的k时刻开关管状态;Sbk+1为b相的k+1时刻开关管状态;Sbk为b相的k时刻开关管状态;Sck+1为c相的k+1时刻开关管状态;Sck为c相的k时刻开关管状态。其代价函数J如公式(4)所示。
J=|p*-pk+1|+|q*-qk+1|+λN' " " " " " " " "(4)
式中:p*和q*分别为有功功率值和无功功率值;pk+1和qk+1分别为k+1时刻的有功功率值和无功功率值;λ为固定值。
如果需要降低系统的开关频率,那么增大λ数值设定值。如果需要优化系统的功率跟踪效果,那么降低λ数值设定值。当开关函数的比例系数过大时,系统的功率跟踪性能会显著降低。因此,在最优化控制过程中,当选择两者的参数时,须慎重考虑功率跟踪性能和开关频率降低性能的制约性。
3 基于虚拟磁链的VCFRMPDCP策略
虽然定系数降频模型预测直接功率控制(Fixed Coefficient""and Frequency Reduction" for Model Predictive Direct Power Control,FCFRMPDCP)能够有效解决系统的开关损耗问题,但是其固定的系数控制范围较窄,其值过大,在功率波动较小的情况下,开关频率降低,使系统的输出电流值与功率纹波量增大。在严重情况下,系统会发生震荡,导致不稳定。如果其值设置过小,那么很难达到降频的效果。在不同情况下,定系数中的系数并不易选取。基于功率钳位原则,将FCFRMPDCP改进为VCFRMPDCP,计算过程如公式(5)所示。
式中:λ'为变系数;a为比值放大系数;b为非零的固定值,避免开关函数趋向于无穷大。
在功率波动的情况下,变系数降频控制策略能够动态调节λ'的数值,减少功率开关管的工作次数,避免三相逆变器系统功率出现大幅度波动。
4 仿真验证
为了验证基于虚拟磁链的降频预测直接功率控制策略的可靠性,在MATLAB/Simulink平台中搭建模型进行验证,DC母线电压值为700 V,三相AC电压幅值为311 V,三相AC电压频率为50 Hz,滤波电感为5 mH,采样周期为0.02 ms。对比基于虚拟磁链的MPDPC、FCFRMPDCP和VCFRMPDCP这3种策略的仿真结果。
由于开关频率不固定,因此选取3种控制策略的平均开关频率参数进行对比。具体结果如下:使用基于虚拟磁链的MPDPC策略,系统的平均开关频率和电流的总谐波失真THD值分别为6 083 Hz和2.32%;使用基于虚拟磁链的FCFRMPDCP策略,平均开关频率和THD值分别为5 089 Hz和5.70%;使用基于虚拟磁链的VCFRMPDCP策略,平均开关频率和THD值分别为4 316 Hz和2.63%。
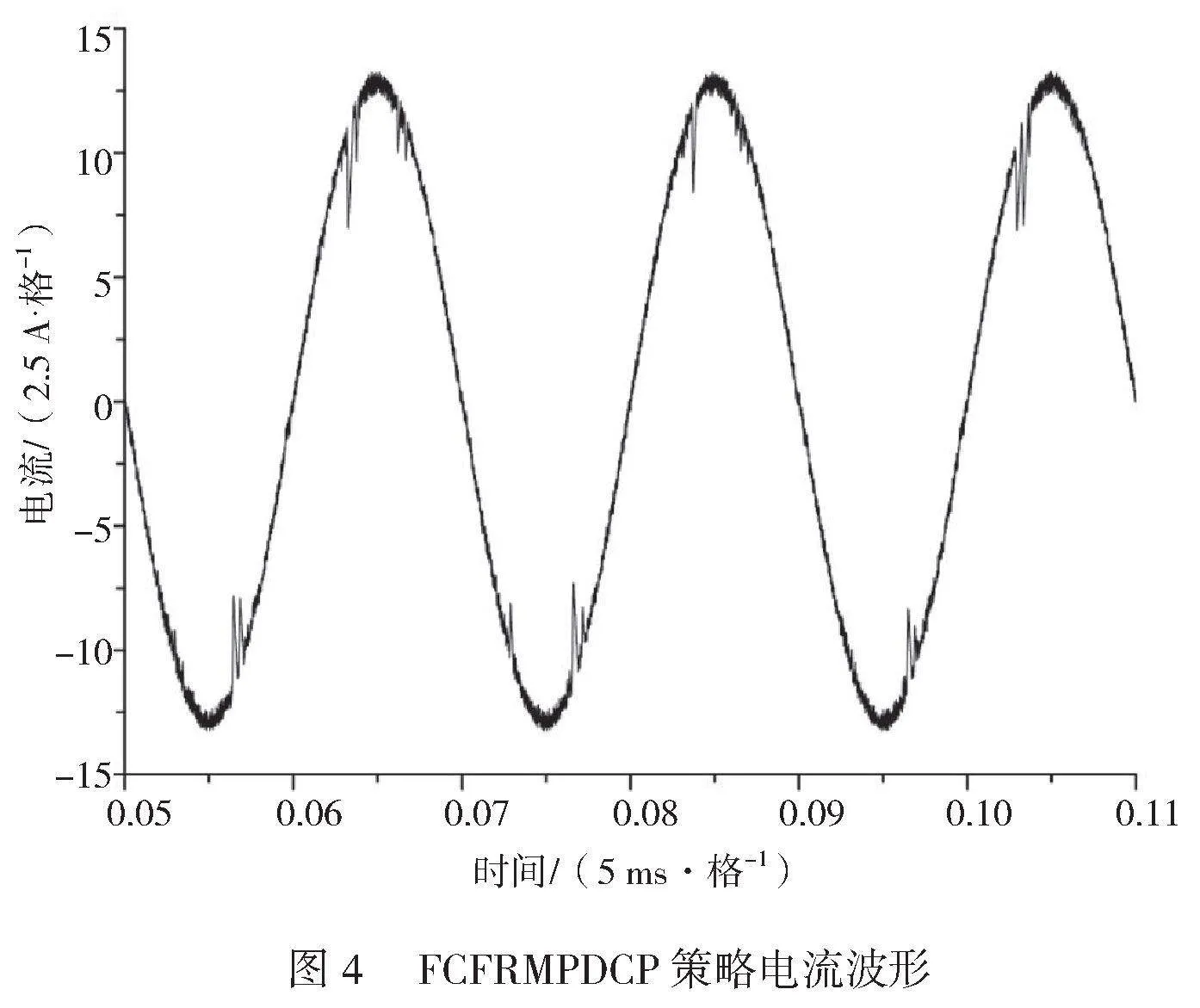
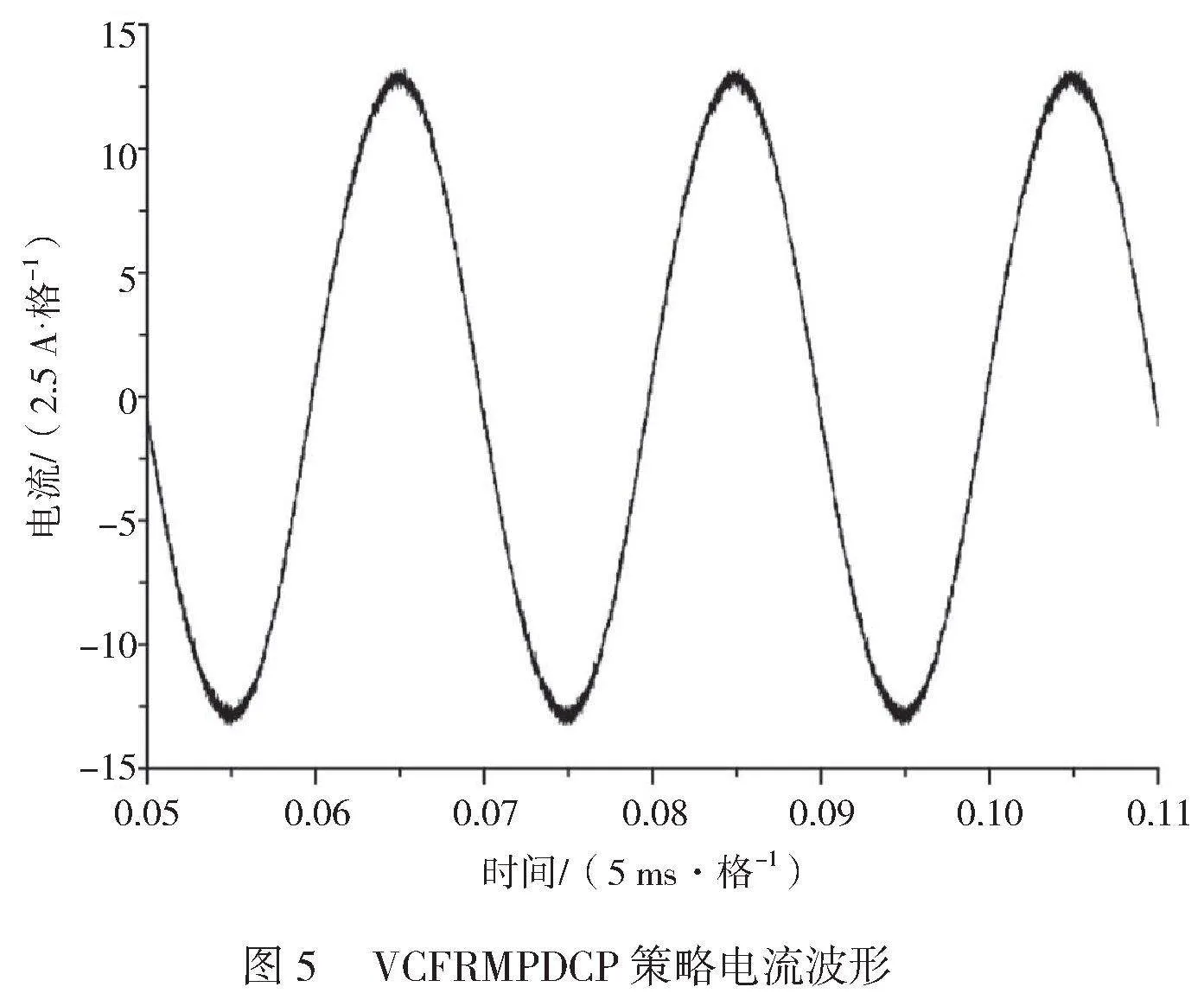
由仿真结果可知,与传统的MPDPC相比,FCFRMPDCP策略降低了开关频率,电流THD明显增大;VCFRMPDCP策略不仅降低了系统的开关频率,而且电流THD值较好。
虚拟磁链轨迹仿真结果如图2所示,由图2可知磁链在α、β轴中几乎没有偏移,响应速度较快。
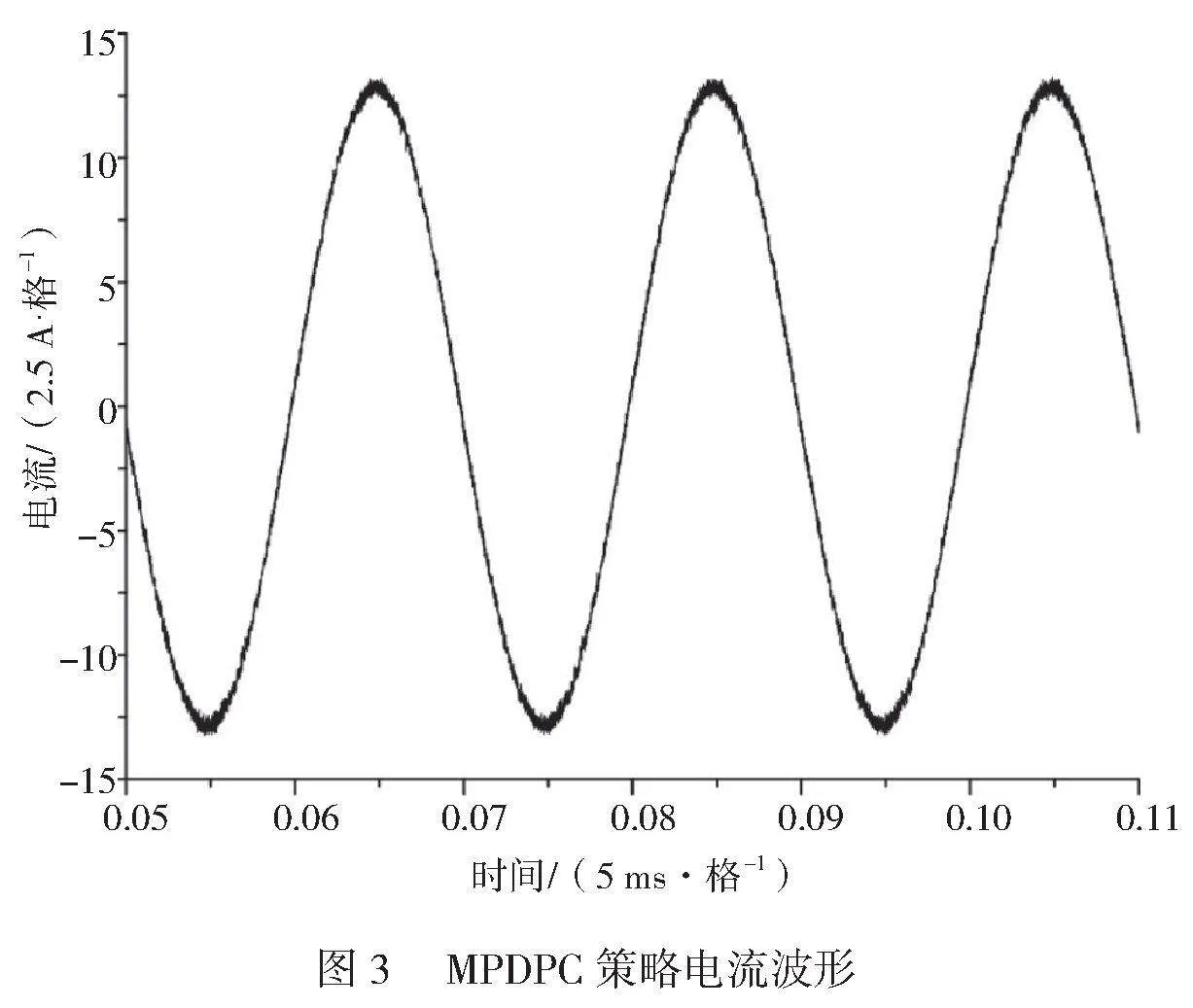
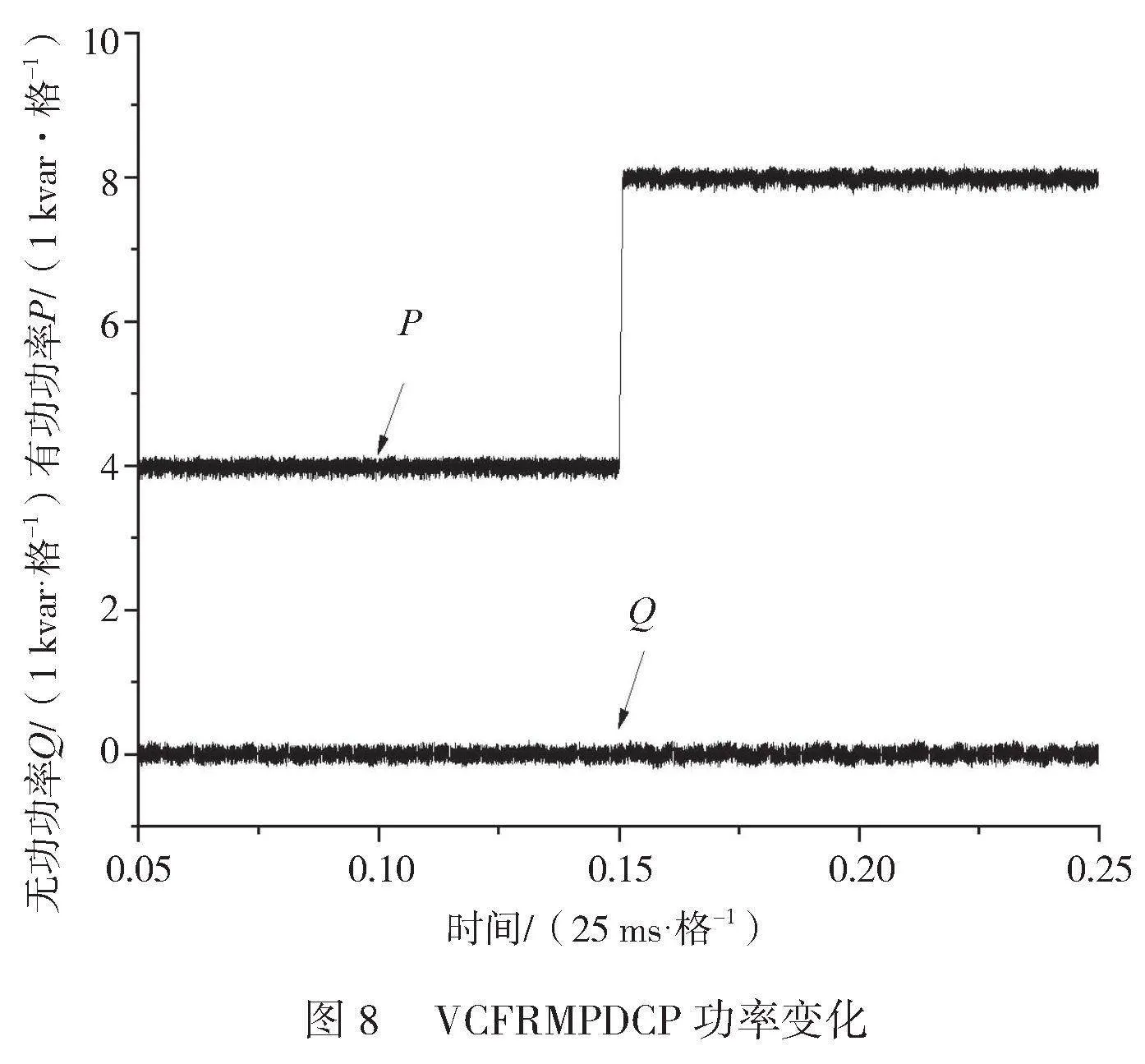
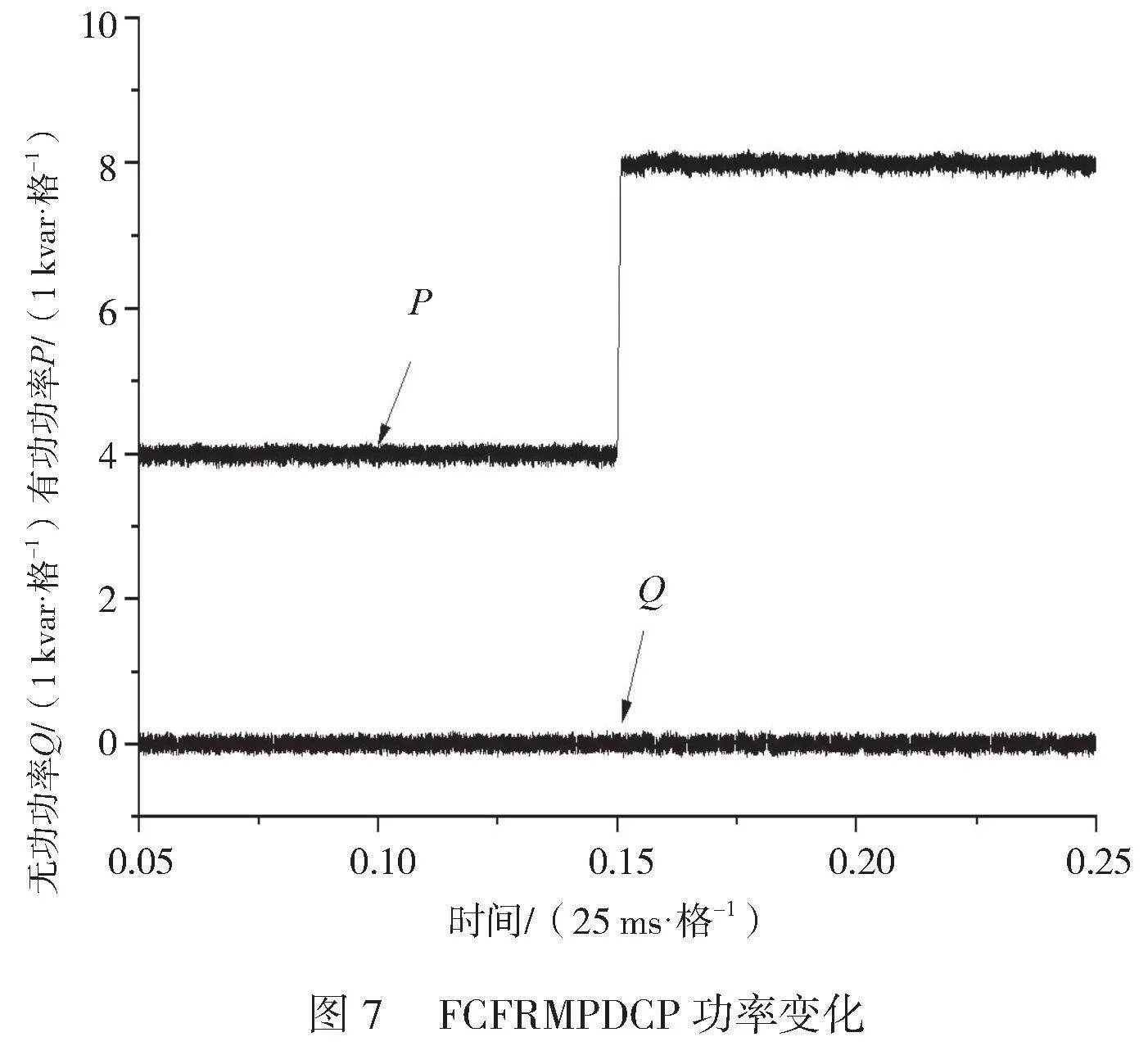
当系统稳定时,基于虚拟磁链的MPDPC策略、FCFR-MPDCP策略和VCFRMPDCP策略的输出并网电流波形如图3~图5所示。由仿真结果可知,在FCFRMPDCP策略控制中,系统的开关频率降低,但是电流输出波形出现了较大的畸变。VCFRMPDCP策略不仅降低了开关频率,而且输出了较高水平的电流波形。为了验证系统的动态性能,当t=0.4 s时将参考的有功功率从4 000 W提升至8 000 W。在3种控制策略中,当系统稳定时输出的有功和无功功率变化如图6~图8所示。其仿真结果表明使用FCFRMPDCP策略,系统的功率波动范围较大,使用VCFRMPDCP策略,系统的功率波动较小,与MPDCP策略相比差距较小。系统能够快速进行动态调节,准确跟踪预测值,有效控制有功和无功功率的波动。
5 结论
本文在并网逆变器模型预测直接功率模型的基础上提出基于虚拟磁链的变系数模型预测直接功率控制策略。使用该策略,系统不需要额外增加交流电压传感器,与传统的定系数模型预测直接功率控制相比,不仅降低了开关频率,而且系统功率波动小,稳定性提升。
参考文献
[1]曾正,赵荣祥,汤胜清,等.可再生能源分散接入用先进并网逆变器研究综述[J].中国电机工程学报,2013,33(24):1-12.
[2]李磊,强耀东,袁辉,等.基于并网逆变器的新型多代价函数MPDPC研究[J].电子器件,2023,46(3):849-853.
[3]崔清华.三相并网逆变器模型预测直接功率控制研究[D].镇江:江苏大学,2019.
[4]江田田,于新红,苏畅,等.基于补偿函数观测器的三相并网逆变器无模型预测功率控制[J].电力系统及其自动化学报,2024(4):1-8.
[5]张清鹏,万健如.PWM整流器无电压传感器预测电流控制[J].电子测量与仪器学报,2016,30(5):817-823.
[6]张文娟,高勇,马浩淼,等.PWM整流器虚拟电网磁链振荡性能改善[J].电机与控制学报,2010,14(7):23-28,35.
