极地系泊钻井平台动力响应分析及优化设计
2024-11-21丁一周利丁仕风刘仁伟陈嘉明孙乾洋
摘" 要: 极地油气资源钻探要求系泊钻井平台具有较好的定位性能,目前许多极地作业的钻井平台是敞水平台经抗冰改造而来的.为了研究极地有冰和无冰两种环境下不同海况对系泊钻井平台动力响应的影响,基于环向裂纹法对海冰与系泊平台的相互作用过程进行了数值模拟,结合系泊分析软件ANSYS AQWA进行二次开发,对不同环境载荷下钻井平台和系泊系统进行时域分析,分别得到极地有冰和无冰环境下系泊钻井平台的动力响应,并对两种环境下的响应进行了对比研究.为保障经抗冰改造后的钻井平台在极地环境下的系泊安全性,以极地极端海况为场景设计正交试验,得到系泊参数对平台响应的影响规律,研究结果表明:合理选择系泊缆数量、锚链夹角和预张力可减小平台漂移量、增大安全系数;提出了满足规范要求的极地有冰环境下系泊系统设计方案,可为实际工程提供参考.
关键词: 钻井平台;冰载荷;系泊参数;正交试验;数值模拟
中图分类号:U674.38+1""" 文献标志码:A""""" 文章编号:1673-4807(2024)05-001-08
DOI:10.20061/j.issn.1673-4807.2024.05.001
收稿日期: 2023-03-14""" 修回日期: 2021-04-29
基金项目: 国家自然科学基金面上项目(52171259);国家自然科学基金青年项目(52201323);国家重点研发计划项目(2022YFE0107000);工信部高技术船舶科研项目(工信部重装函[2021]342号)
作者简介: 丁一(1998—),男,硕士研究生
*通信作者: 刘仁伟(1992—),男,博士,讲师,研究方向为极地船舶与海洋工程研发设计与工程应用.E-mail: rwliu2000@163.com
引文格式: 丁一,周利,丁仕风,等.极地系泊钻井平台动力响应分析及优化设计[J].江苏科技大学学报(自然科学版),202 38(5):1-8.DOI:10.20061/j.issn.1673-4807.2024.05.001.
Dynamic response analysis and optimization designof polar moored drilling platforms
DING Yi1, ZHOU Li2, DING Shifeng2, LIU Renwei1*, CHEN Jiaming1, SUN Qianyang1
(1.School of Naval Architecture and Ocean Engineering, Jiangsu University of Science and Technology, Zhenjiang 212100, China)
(2.School of Ocean and Civil Engineering, Shanghai Jiao Tong University, Shanghai 200240, China)
Abstract:Drilling for oil and gas resources in the polar region requires mooring platforms to have good positioning performance. A large proportion of platforms currently operating in polar regions are open horizontal platforms modified to resist ice. In this work, the interaction process between sea ice and a mooring platform is simulated numerically based on circumferential crack method and the influence of different environmental loads in polar regions on the dynamic response of mooring drilling platforms are investigated. With the redevelopment of the mooring analysis software ANSYS AQWA, the time domain analysis of the drilling platform and the environmental loads are performed, and the dynamic response of the mooring platform in different environments is analyzed respectively. To study the performance of the mooring drilling platform working in the ice-free environment with ice-resistance improvement, an orthogonal experiment is designed with polar extreme sea conditions to investigate the influence of mooring system parameters on the platform response. The research results indicate that reasonable selection of the number of mooring cables, the angle of the cable and the pretension can effectively reduce platform drift and increase safety factor. Finally, a mooring system design strategy is proposed to meet the requirements of rules in polar environment. This strategy can provide a certain reference in the subsequent practical engineering.
Key words:drilling platform, ice load, mooring parameter, orthogonal experiment, numerical simulation
北极地区蕴藏着丰富的油气资源[1],近年来国内外的许多专家、学者针对极地油气资源开发所涉及的极地钻井装备研发、极地海洋平台冰载荷预报及平台系泊系统设计等方面开展了深入的研究.
在极地钻井装备方面,荷兰Huisman公司创造性地设计了双作业模式的JBF Arctic钻井平台,其能够在两种吃水深度下作业.平台采用20点锚泊定位,作业水深60~1 500 m.Huisman公司还研发了三作业模式的Arctic S钻井平台,与JBF Arctic相比,Arctic S总体尺寸略小,作业水深30~1 000 m,采用16点锚泊定位[2].在冰载荷研究方面,文献[3]提出了一些半经验半解析的预报模型,为早期的破冰船设计提供了有效的方法.文献[4]采用基于离散元方法模拟了饼状碎冰与系泊油轮的相互作用,在冰载荷基础上将流速的影响纳入考虑.文献[5]给出了一种二维水平面上的冰载荷数值模拟方法,研究了极地液货船与平整冰之间的相互作用,其后,文献[6]又在此基础上研究了冰厚、冰速及锚泊位置对系泊船舶运动响应的影响.文献[7]运用三维离散单元法模拟了浮冰与船体之间的相互作用,研发了冰载荷预报软件Sdem.文献[8]使用Star-CCM+模拟了船尾破冰时碎冰与螺旋桨的相互作用,认为CFD-DEM耦合方法是解决船-水-碎冰相互接触问题的有效手段.文献[9]提出了一种类似于有限元思想的船-冰相互作用模型,用以求解船舶动态冰阻力,该模型将平整冰划分为若干的冰网格并为其确定了切合实际的失效模式.文献[10]以Kulluk号为研究对象,对系泊钻井船与平整冰相互作用进行了数值模拟.在冰区系泊系统设计方面,文献[11]利用三维水动力软件对系泊状态JBF抗冰平台进行数值模拟,总结了抗冰平台的设计理念.文献[12]使用OrcaFlex模拟了碎冰条件下系泊船舶的动态响应,得到系泊船舶随系泊点位置变化的响应特征.文献[13]采用时域耦合分析法,预报了冰区核电平台的系泊张力,提出一种性能优良的核电平台系泊设计方案.
目前许多适用于极地冰区的钻井平台是由无冰环境钻井平台改造而来,很可能导致平台在极地冰区环境下发生滑移、倾斜、共振甚至破坏.文献[14]研究发现,很多国家发生海工建筑被摧毁的工程事故,其主要原因是对冰灾的估计不足.因此,针对经改造的钻井平台进行抗冰性能分析,校核平台及系泊系统在冰载荷作用下的定位性能是现阶段极地钻探装备设计的重点.
文中考虑风、浪、流及平整冰的联合作用,基于环向裂纹法得到精度较高的冰载荷数据,利用有限元软件对钻井平台进行数值模拟,对比其在极地区域无冰和有冰两种环境下的运动响应和系泊张力,同时根据正交试验的原理,研究了不同系泊参数对平台运动响应和系泊张力的影响,提出满足规范要求的系泊方案.
1" 基本原理
1.1" 系泊平台运动方程
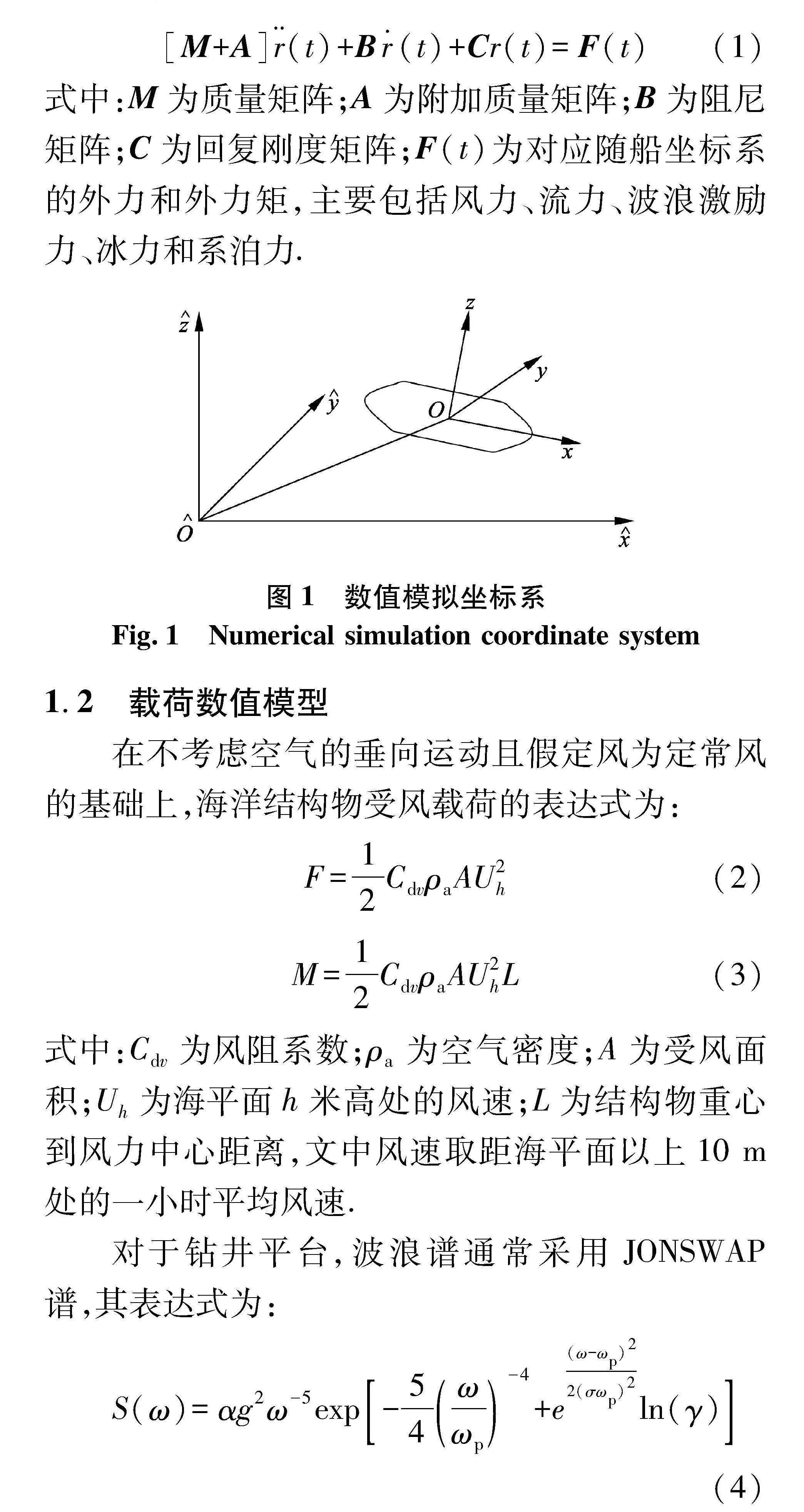
在推导浮动刚体运动方程时,采用了两个坐标系.o^x^y^z^坐标系是全局固定坐标系,而oxyz是随刚体运动的随体坐标系,如图1.因此平台六自由度运动方程表达为:
[M+A]r¨(t)+Br·(t)+Cr(t)=F(t)(1)
式中:M为质量矩阵;A为附加质量矩阵;B为阻尼矩阵;C为回复刚度矩阵;F(t)为对应随船坐标系的外力和外力矩,主要包括风力、流力、波浪激励力、冰力和系泊力.
1.2" 载荷数值模型
在不考虑空气的垂向运动且假定风为定常风的基础上,海洋结构物受风载荷的表达式为:
F=12CdvρaAU2h(2)
M=12CdvρaAU2hL(3)
式中:Cdv为风阻系数;ρa为空气密度;A为受风面积;Uh为海平面h米高处的风速;L为结构物重心到风力中心距离,文中风速取距海平面以上10 m处的一小时平均风速.
对于钻井平台,波浪谱通常采用JONSWAP谱,其表达式为:
S(ω)=αg2ω-5exp-54ωωp-4+e(ω-ωp)22(σωp)2ln(γ)(4)
式中:α为广义Phillips常数;g为重力加速度;ω为角频率;ωp为谱峰角频率;σ为谱型参数;γ为谱峰升高因子.文中流体载荷采用剖面流形式加载,利用插值法定义剖面流速和方向.
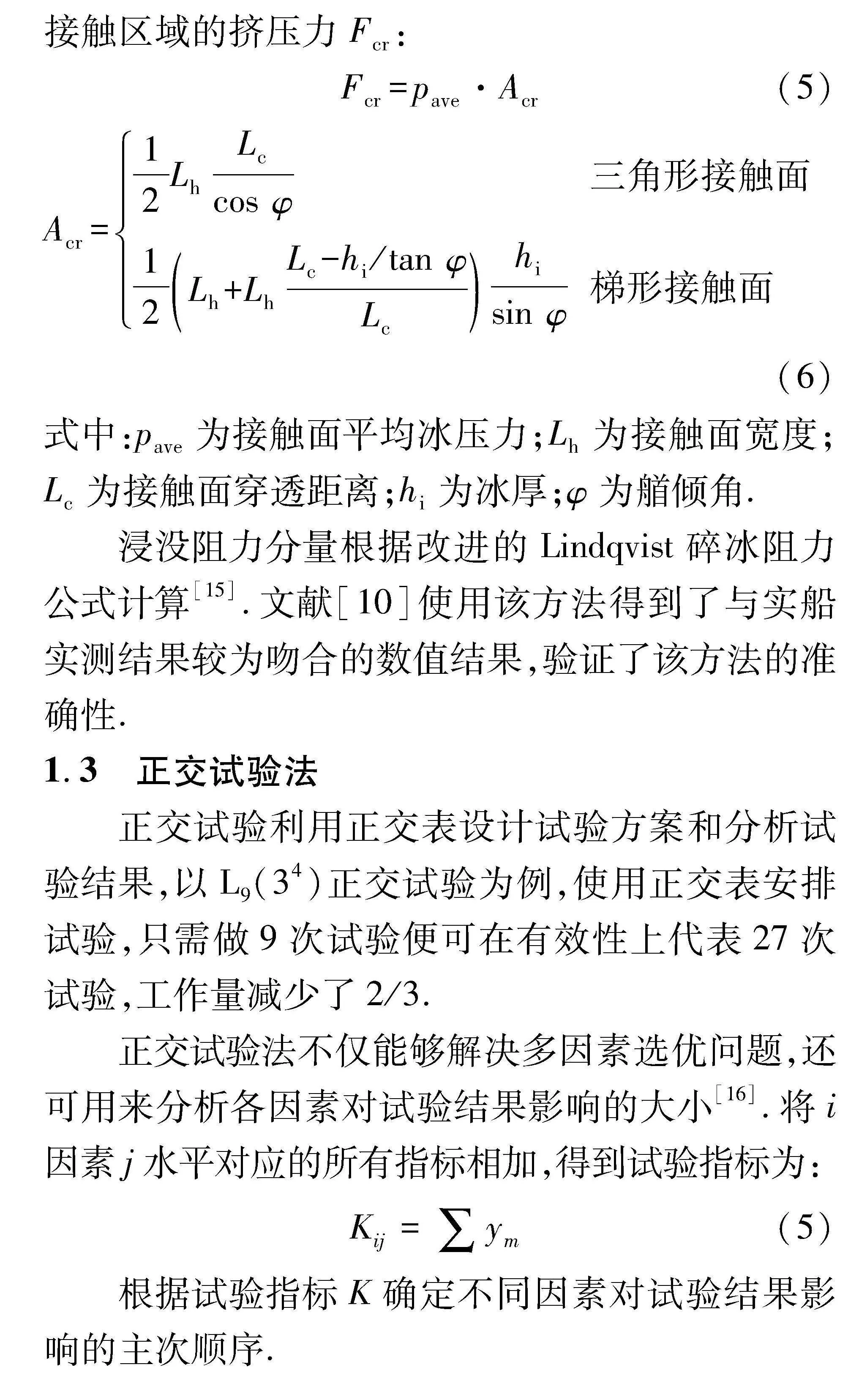
系泊结构物与平整冰在水线面处发生局部碰撞,随着平整冰的前进,冰层受到结构物的碾压作用且碾压面积不断增大,直至冰层发生局部断裂.通过搜索结构物与冰接触区域,计算相互作用的接触面积Acr,结合平整冰的弯曲断裂数值模型确定接触区域的挤压力Fcr:
Fcr=pave·Acr(5)
Acr=12LhLccos φ""""""" 三角形接触面
12Lh+LhLc-hi/tan φLchisin φ梯形接触面(6)
式中:pave为接触面平均冰压力;Lh为接触面宽度;Lc为接触面穿透距离;hi为冰厚;φ为艏倾角.
浸没阻力分量根据改进的Lindqvist碎冰阻力公式计算[15].文献[10]使用该方法得到了与实船实测结果较为吻合的数值结果,验证了该方法的准确性.
1.3" 正交试验法
正交试验利用正交表设计试验方案和分析试验结果,以L9(34)正交试验为例,使用正交表安排试验,只需做9次试验便可在有效性上代表27次试验,工作量减少了2/3.
正交试验法不仅能够解决多因素选优问题,还可用来分析各因素对试验结果影响的大小[16].将i因素j水平对应的所有指标相加,得到试验指标为:
Kij=∑ym(5)
根据试验指标K确定不同因素对试验结果影响的主次顺序.
2" 基本参数
2.1" 系泊平台参数
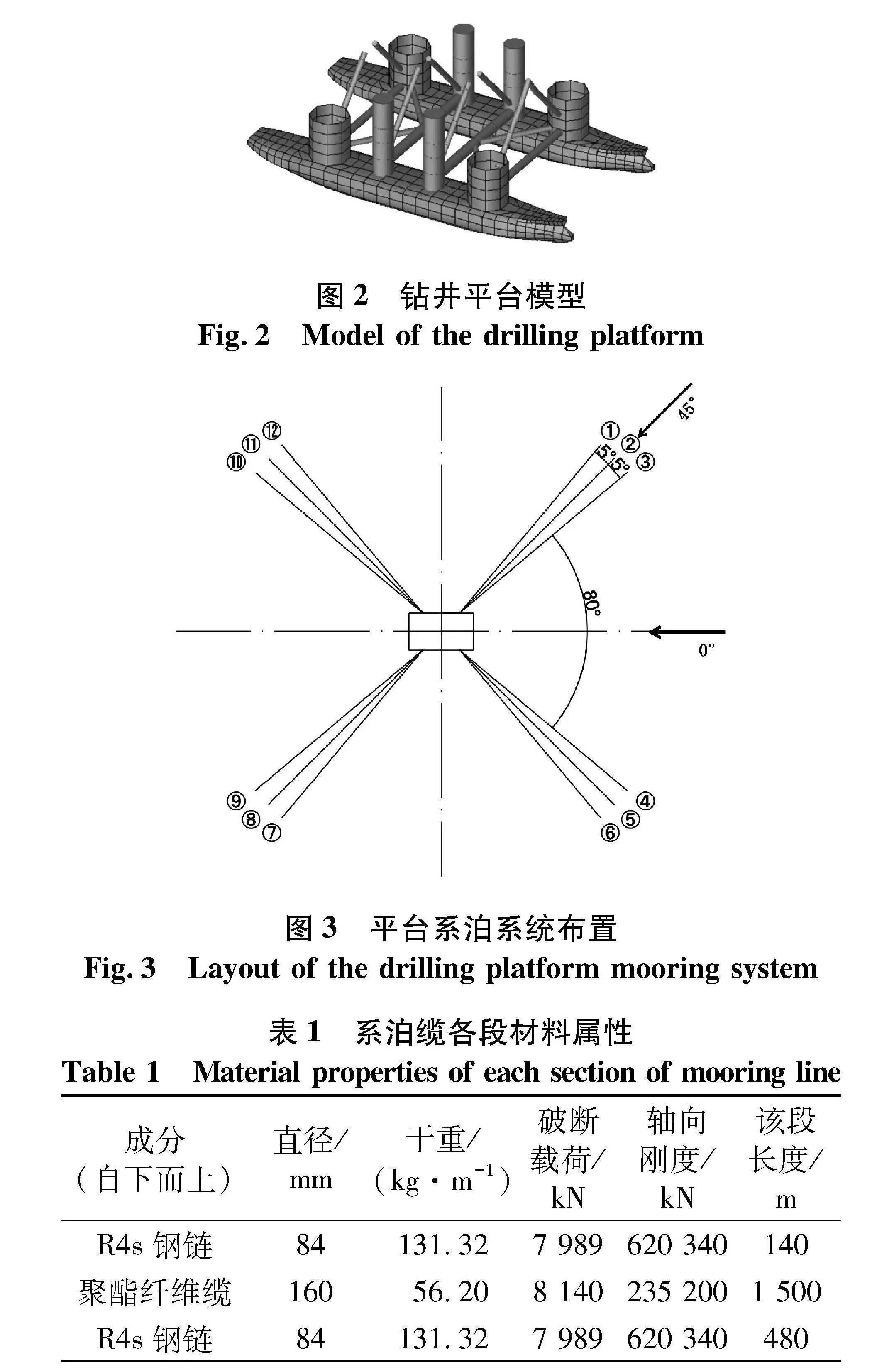
采用的钻井平台为双浮箱、八立柱的半潜平台.平台的上部简化为质量点,下部建模如图2.平台的总长122.17 m,型宽70.42 m,单浮箱长122.17 m,宽16.77 m,高8.54 m,排水量4.18×107 t,工作水深1 000 m.平台初始采用12点系泊,4×3对称布置,3根锚链为一组,组内两相邻锚链间夹角为5°,组与组间夹角为80°,上部与平台导缆孔相连,系泊半径为1 850 m.系泊缆绳选用三段组合式,顶端和底端为R4s钢链,中间过渡段为聚酯纤维缆.系泊系统布置如图 系泊缆各段的材料属性如表1.
2.2" 环境参数
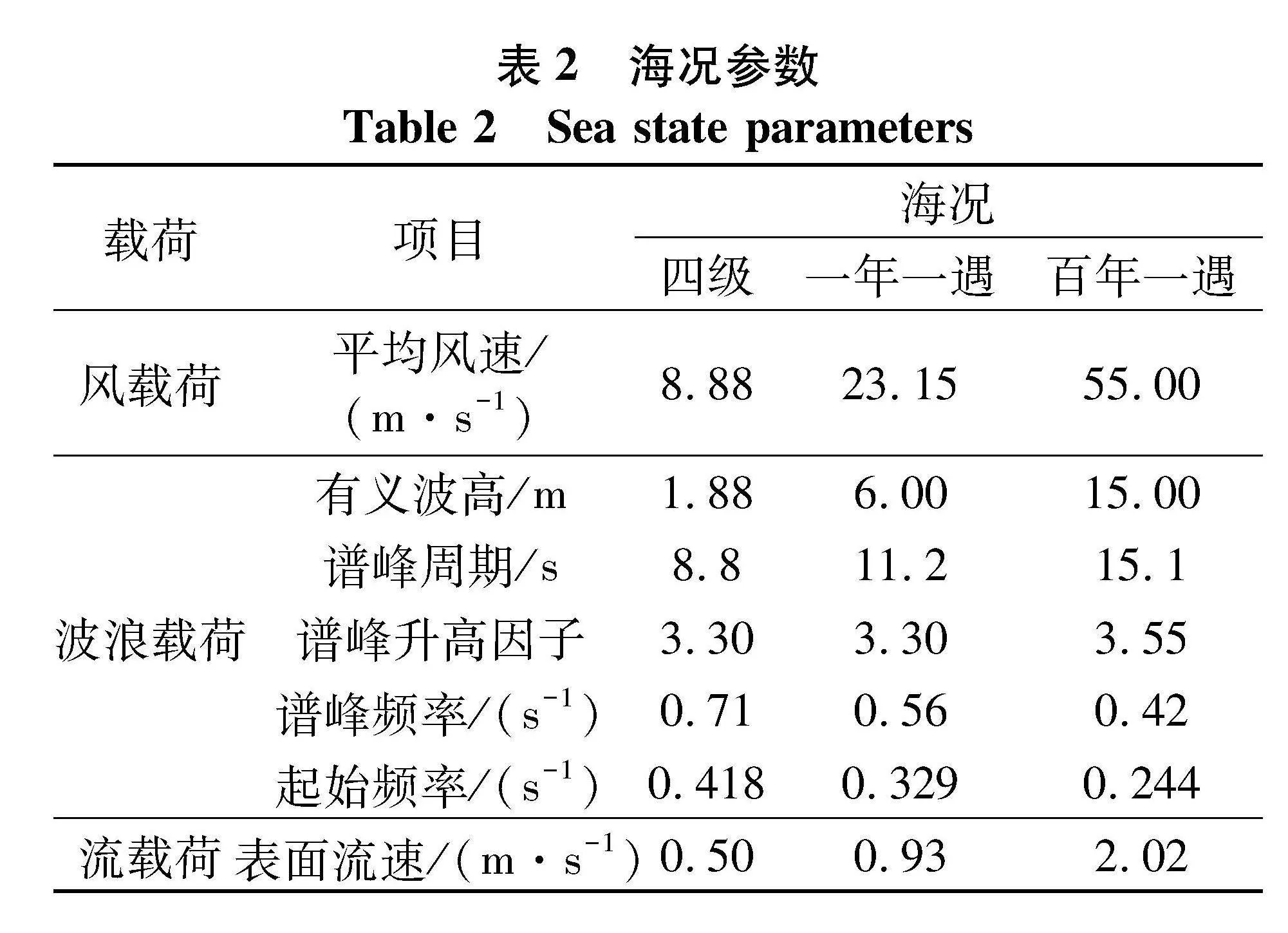
根据极地某海域海况统计情况,选取四级海况、一年一遇和百年一遇海况进行模拟,具体参数如表2.一般情况下,当风、浪、流载荷同向时,平台的响应和缆绳张力最大,因而在数值模拟中取风和流载荷与波浪同向.由于文中选用4×3对称分布的系泊系统,故浪向角选取0°和45°两个典型方向,如图3.
为便于理论分析,数值计算需作假设:
(1) 海底与锚点、导缆孔与锚点均为刚性连接,不考虑海底走锚和导缆孔应变;
(2) 风、浪、流载荷具有同向性,即保持0°或45°不变;
(3) 冰与平台的相互作用发生在水线面附近.
3" 冰载荷计算
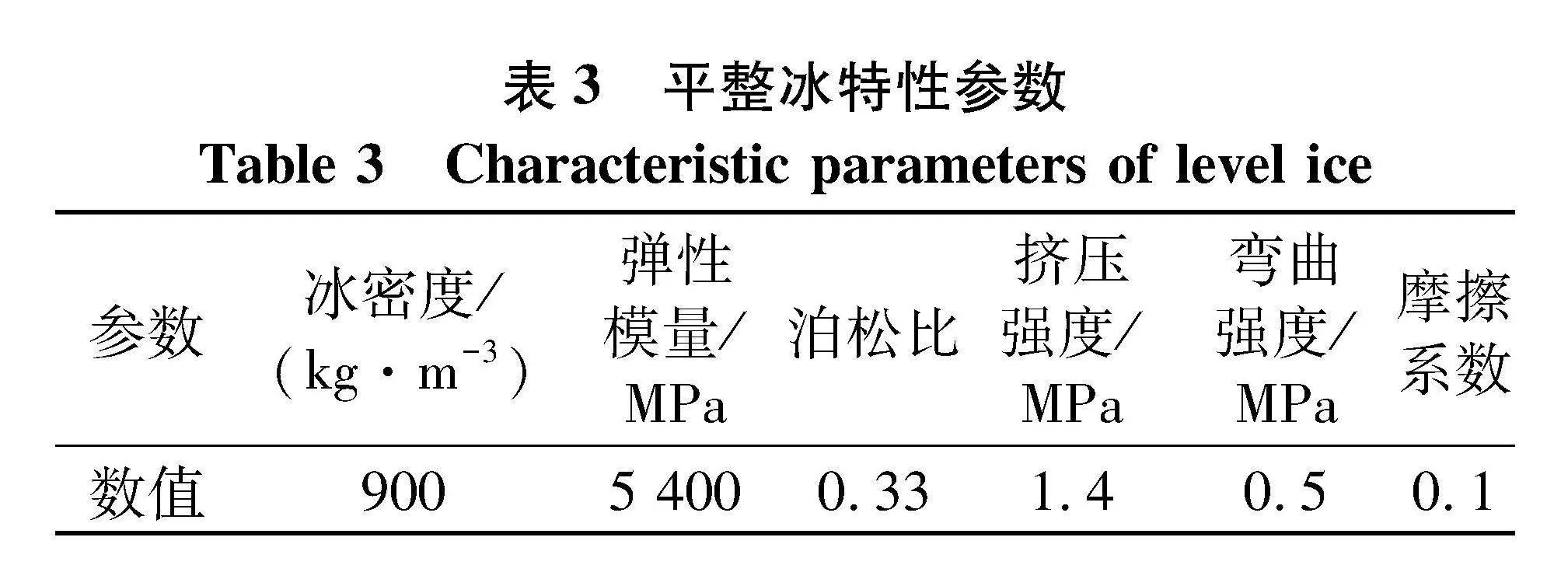
基于文献[10]的数值方法,对平整冰开始接触平台到完全穿过平台达到动态平衡的全过程进行模拟.相关海冰特性参考ISO 19906(2010)和PC冰级规则设置,具体参数如表3.
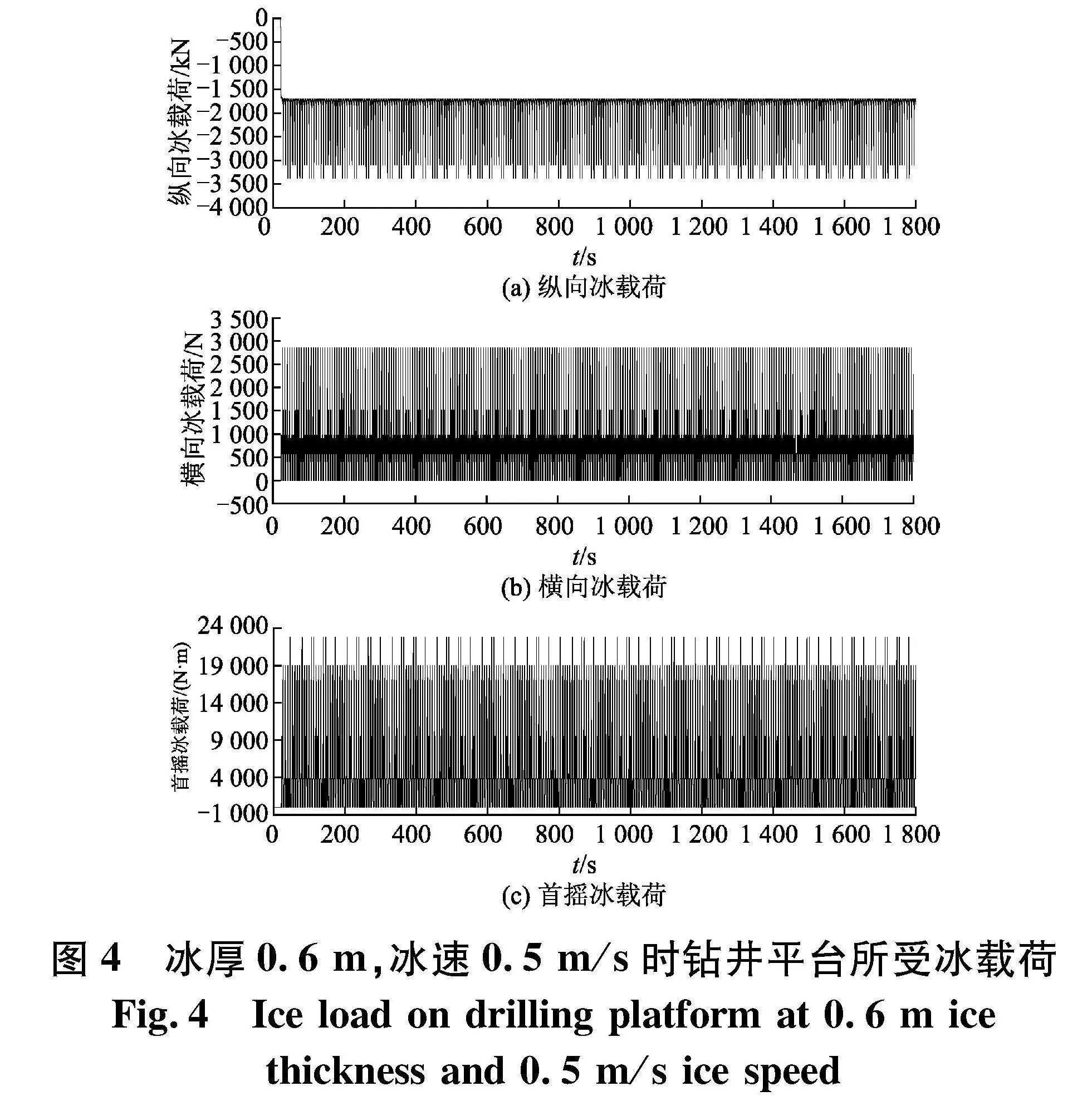
数值模拟中冰厚0.6 m、冰速0.5 m/s,模拟时间1 800 s,时间步长0.2 s,得到的随船坐标下的纵向冰载荷、横向冰载荷和首摇冰载荷时间历程如图4.由图可知,冰载荷具有高峰值、随机性强的特点.由图4(a)可以看出,平台所受纵向冰载荷最大值可达3 376 kN;平台相对稳定状态后,纵向冰载荷最小值约为1 740 kN,这主要是由水面层冰和水下碎冰产生的[17].由图4(b)可以看出,平台所受横向冰载荷最大值约2 860 N;达到相对稳定状态后的横向冰载荷均值为607.4 N.由图4(c)可以看出,平台所受首摇冰载荷最大值约为23 000 N·m;达到相对稳定状态后的首摇冰载荷均值为5 047 N·m.
4" 模拟结果与分析
4.1" 无冰环境模拟结果
系泊系统设计主要考虑锚链的强度和平台的偏移量[18-19].API RP 2SK和API RP 2SM规定钻井平台正常作业的水平最大漂移为水深的5%,锚链最大张力为破断强度的60%,即安全系数不低于1.67;极限情况平台自存水平最大漂移不超过水深的10%,锚链最大张力不超过破断强度的80%,即安全系数不低于1.25.
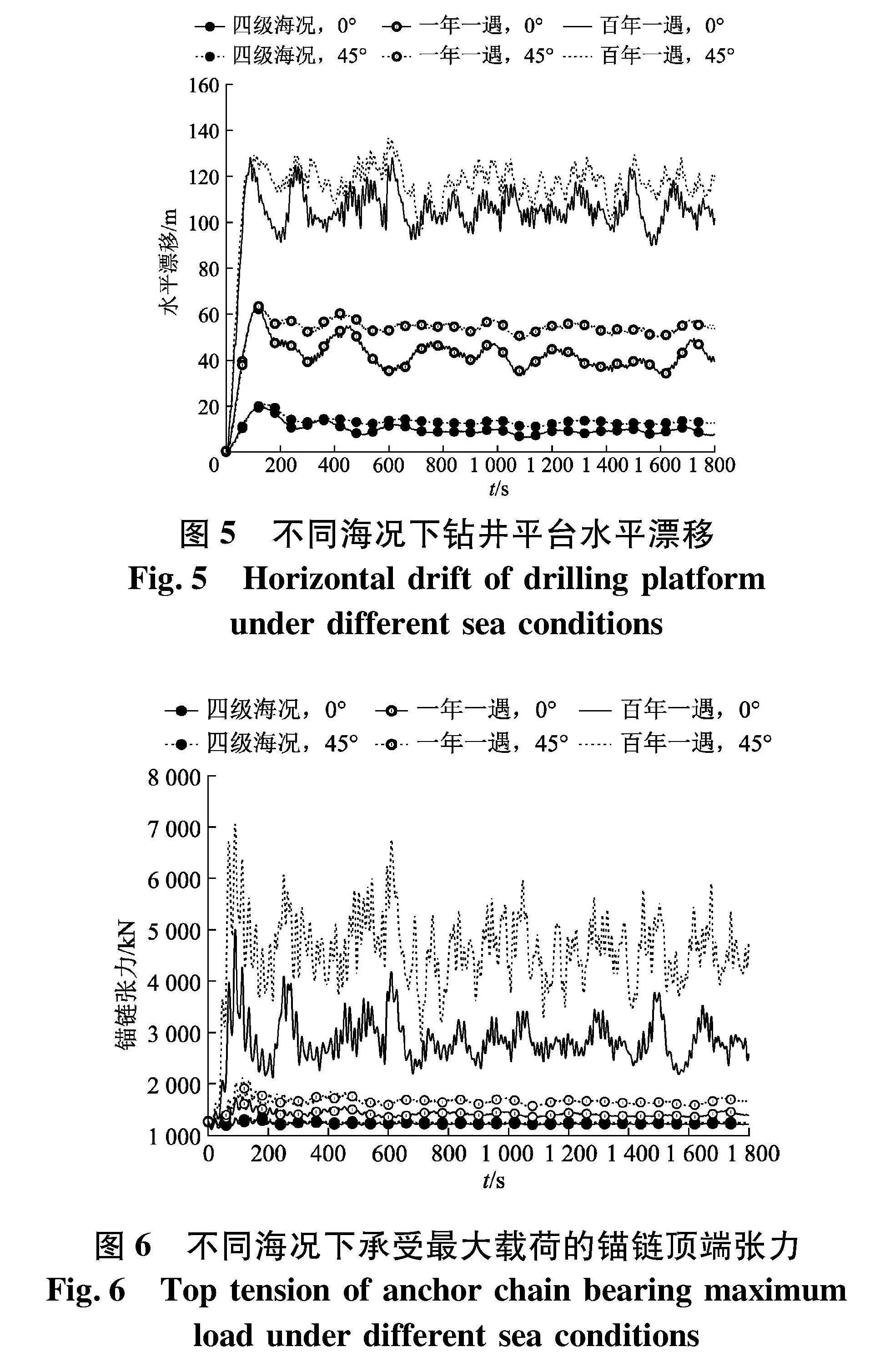
采用ANSYS AQWA软件对系泊钻井平台动力响应进行数值模拟,选取四级、一年一遇和百年一遇海况参数,采用DRIFT模块进行时域分析,计算各海况下钻井平台的动力响应,得到平台水平漂移和承受最大载荷的锚链顶端张力时间历程,如图5、6.由于浪向角等于0°为平台两浮筒的迎浪方向,浮筒与波浪载荷的接触面积最小,故为0°时平台的水平漂移和张力均略大于45°.
由图5、6可看出,平台的水平漂移和锚链张力在前200 s会出现一个较大的峰值,这是由于锚链初始的恢复力较小,突然施加的环境载荷会对平台产生一个较大的冲击.因此,统计平台稳定后的动力响应情况是有必要的.
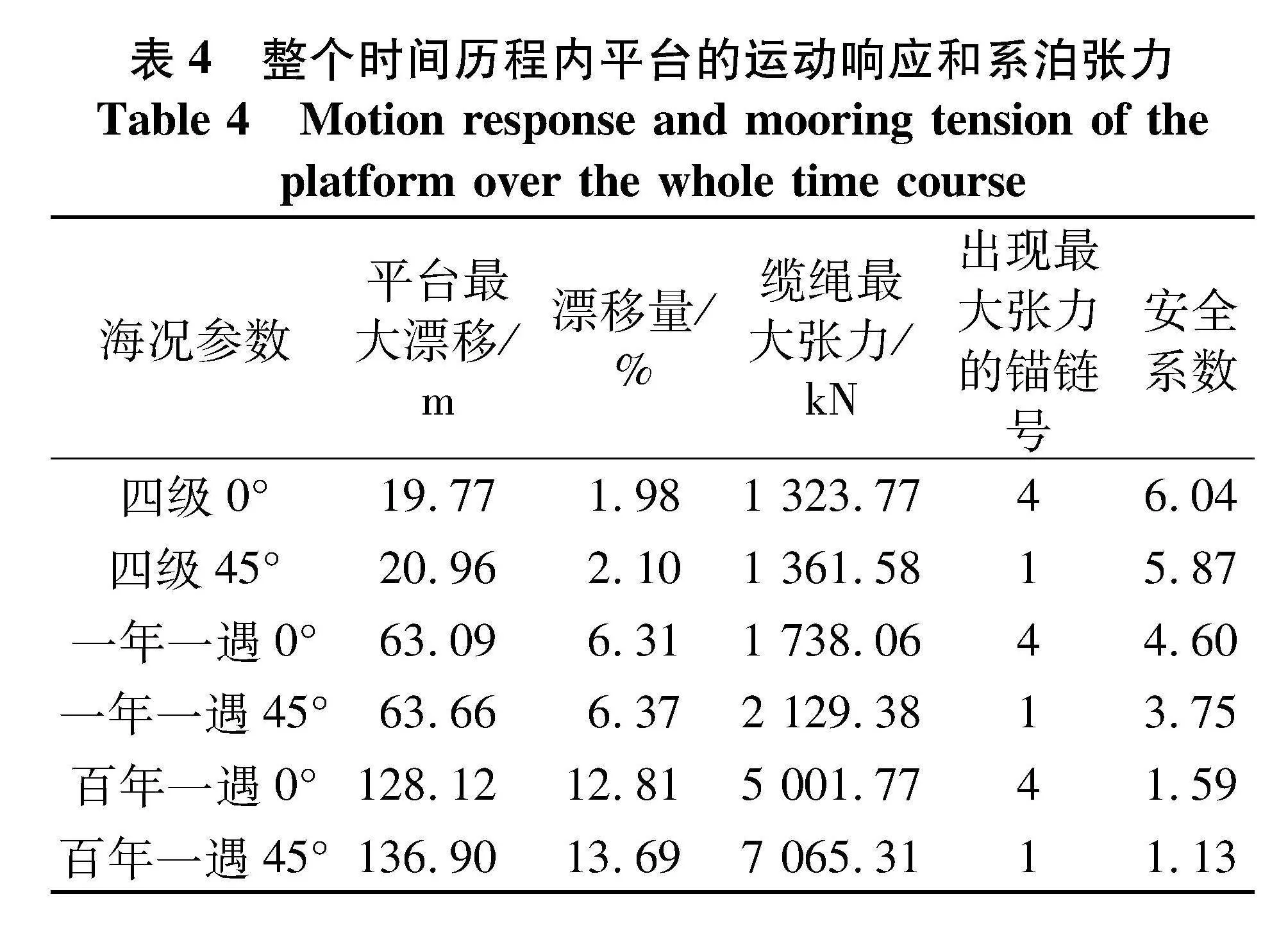
表4统计了整个时间历程内平台的运动响应和系泊张力.四级海况下平台最大漂移约为水深的2%,缆绳的安全系数为5.8 满足API规范对平台正常作业要求.一年一遇海况下,平台漂移量达到了6.37%,超过了API规定的正常作业最大漂移,缆绳的安全系数为3.7 满足API规定的正常作业的要求,这种工况可通过系泊系统的优化设计,使平台漂移量也满足规范要求.百年一遇海况下,平台的漂移量达到了13.69%,缆绳的安全系数低于1.2 漂移量和最大张力均已超过API规定平台自存的极限状态.
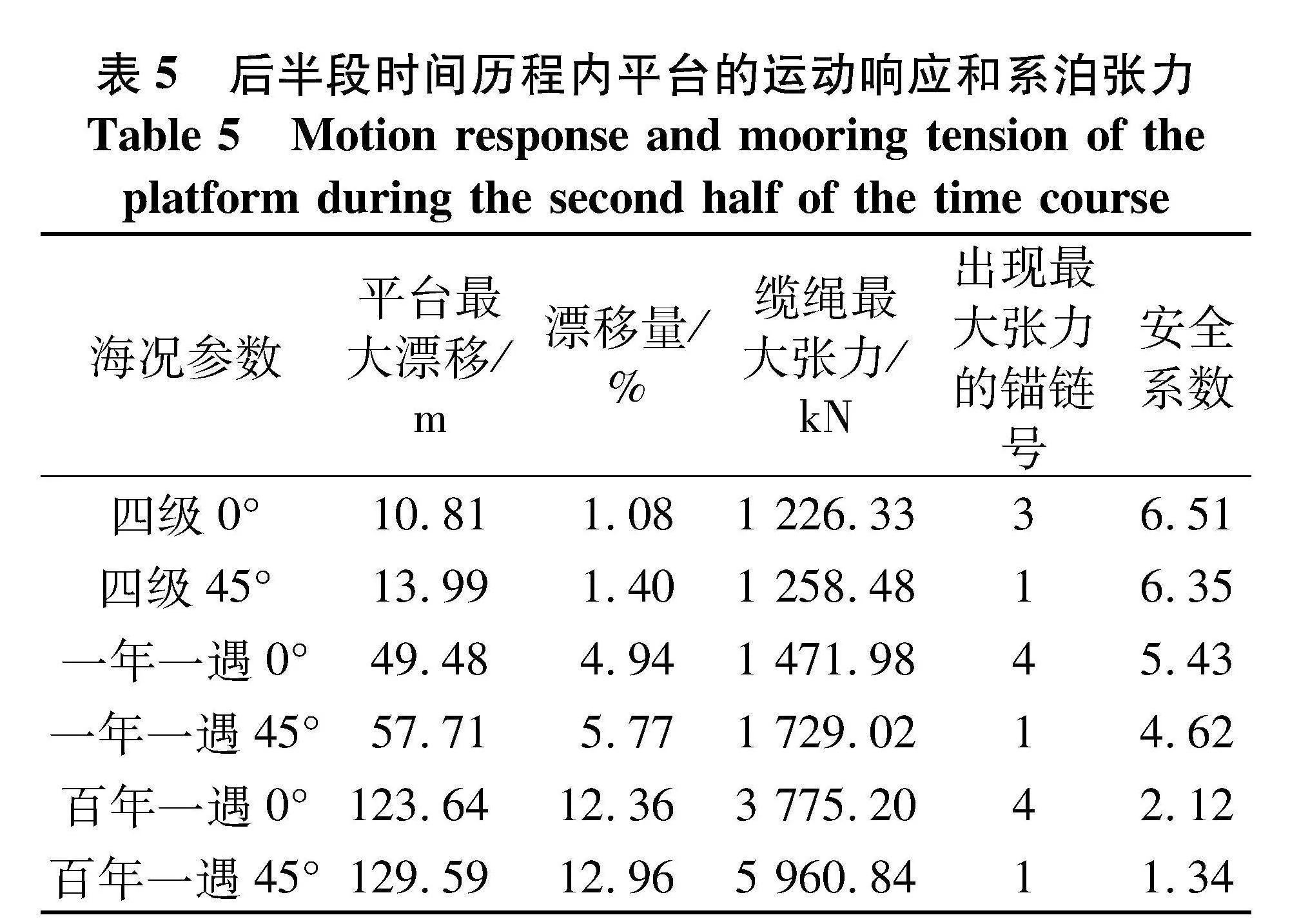
表5统计了平台稳定后的动力响应情况.与全时间历程相比,一年一遇0°浪向海况下平台漂移量满足了API规定正常作业要求;百年一遇0°浪向海况下缆绳安全系数从能够自存变为满足正常作业要求,可见突然施加的载荷对平台影响不可忽视.虽然该工况下安全系数已满足正常作业要求,但平台漂移量依旧超出正常作业的要求,为使平台能在该海况下正常作业,需对平台系泊系统进行优化设计.
4.2" 有冰无冰环境模拟结果对比
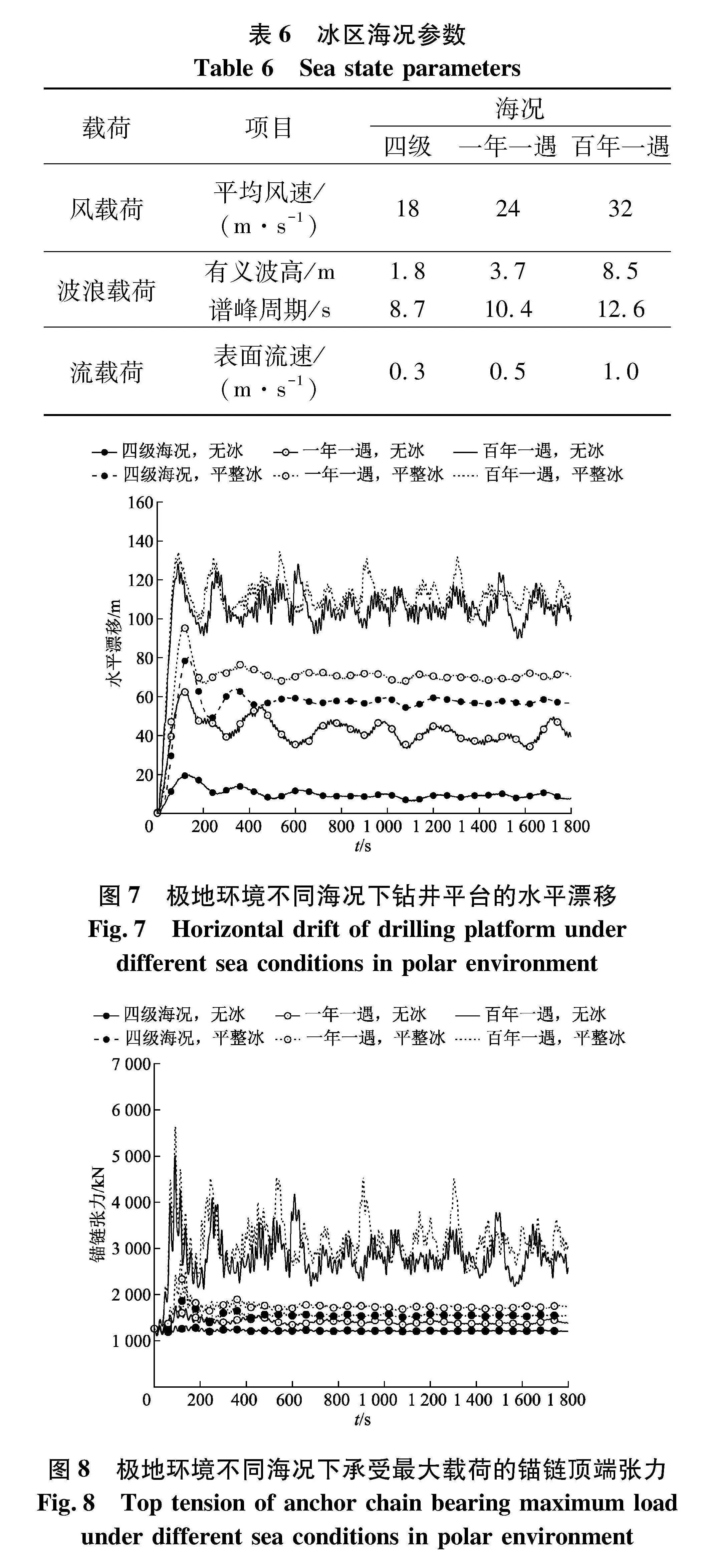
为对比钻井平台在极地无冰和有平整冰海域中动力响应,以极地某海域为研究对象,借助系泊分析软件AQWA的二次开发接口,调用冰载荷时域结果,计算平台在风、浪、流和海冰共同作用下的动力响应,相关载荷参考ISO 19906(2010)规范,如表6.假设风、浪、流、冰载荷方向均为0°进行模拟,模拟总时长1 800 s,时间步长0.2 s,得到各海况下平台水平漂移和锚链张力时域结果,与无冰载荷作用的结果对比,如图7、8.
由图7可以看出,海况相对平稳时冰载荷对平台漂移量影响较大,随着海况等级增加,冰载荷对平台漂移量的影响逐渐变小.四级海况下,有冰环境平台最大漂移约为80 m,约为无冰环境的4倍;稳定后的漂移接近60 m,约为无冰环境的5倍.一年一遇海况下,有冰环境平台漂移量约为无冰环境的2倍;百年一遇海况下,有冰环境平台漂移量仅比无冰环境大5~10 m.由图8可以看出,冰载荷对锚链张力的影响小于其对漂移量的影响.在平台稳定后,不论海况等级高低,有冰环境锚链张力均比无冰环境高300~400 kN.
对比各海况下平台漂移和锚链张力情况,不难发现:平台的漂移量总是优先于缆绳安全系数达到规范值.在四级海况和平整冰联合作用下,平台最大漂移已经超出API规定的平台正常作业允许的漂移量,而该海况下锚链的安全系数约为3.68;在一年一遇海况和平整冰联合作用下,平台最大漂移已经达到96.20 m,接近API规定的平台自存的最大漂移,但此时锚链的安全系数为2.9 依旧有很大的富余.由初始系泊系统为12根锚链、5°的组内夹角、设计预张力约1 260 kN推断,出现这一现象的可能原因是锚链的预张力过小.
5" 系泊参数影响分析
影响系泊平台动力响应的主要因素有系泊缆的数目、组内相邻锚链间夹角和系泊缆的预张力.工程上常选用8~16根系泊缆,4°~15°的锚链夹角进行系泊设计,文中初始选择12根系泊缆、5°夹角较为合理,因此首先需要确定该系泊系统的预张力的合理范围.影响预张力的主要因素有锚点位置(系泊半径、张力倾角等)和锚链长度.在工程应用中,抛锚位置一旦确定就很难进行调整,因此最容易也最符合实际的方法是调整锚链的长度[20].通过在数值模拟中逐渐缩短锚链长度增大预张力,根据中间段聚酯纤维缆的松弛和绷紧状态,初步选定预张力范围为2 000~3 000 kN,对应锚链总长为2 060~2 076 m.
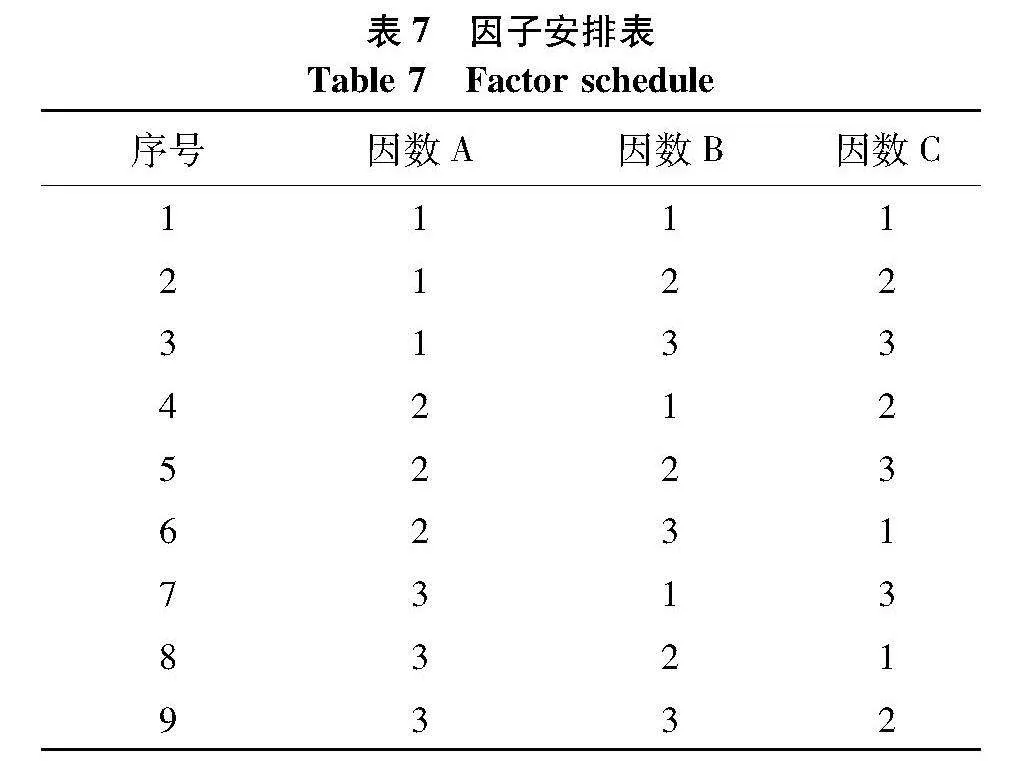
文中采用正交试验设计的方法进行条件实验,考察因素A(系泊缆的数目)、因素B(组内相邻锚链间夹角)、因素C(系泊缆预张力)对系泊结构物运动响应和锚链张力的影响规律.采用L9(34)正交试验,对各因素在试验范围内都取3个水平,即A因素:A1=8根,A2=12根,A3=16根;B因素:B1=5°,B2=10°,B3=15°;C因素:C1=2 000 kN,C2=2 500 kN,C3=3 000 kN.根据正交试验原理制定因子安排表如表7.
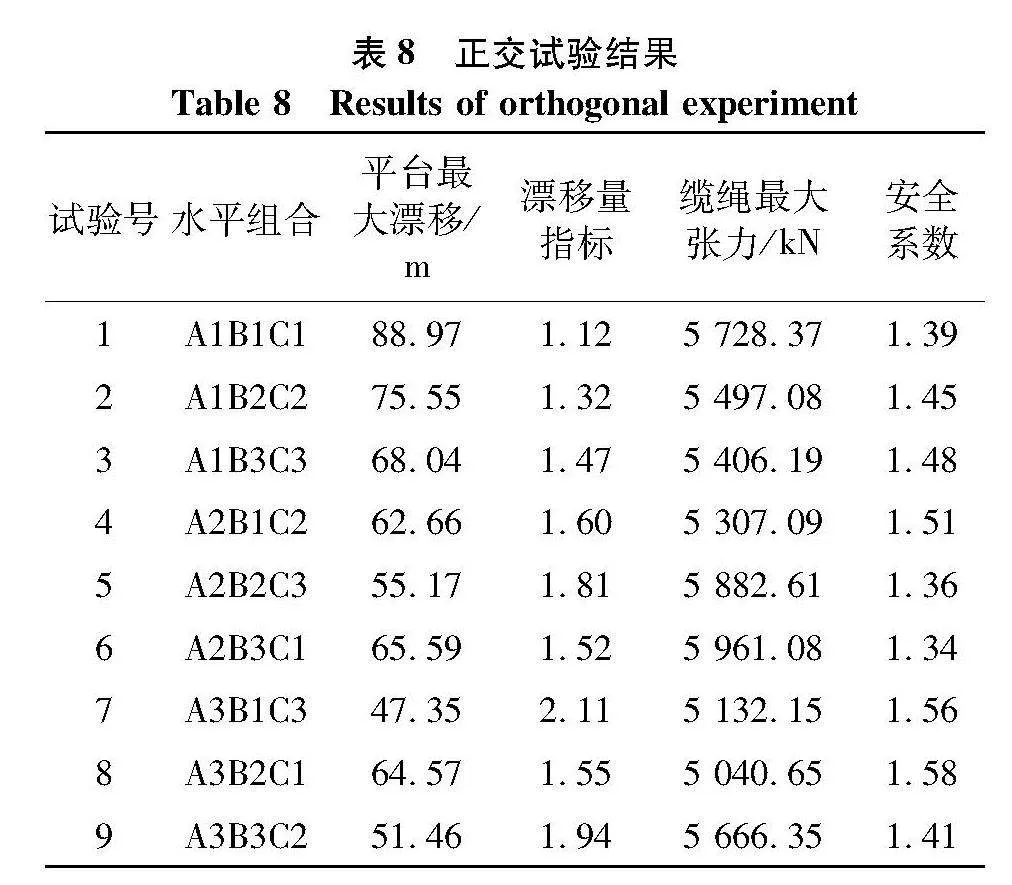
根据因子安排表进行数值模拟,结果如表8.此处定义漂移量指标为API规定的平台自存的漂移量与实际漂移量之比.
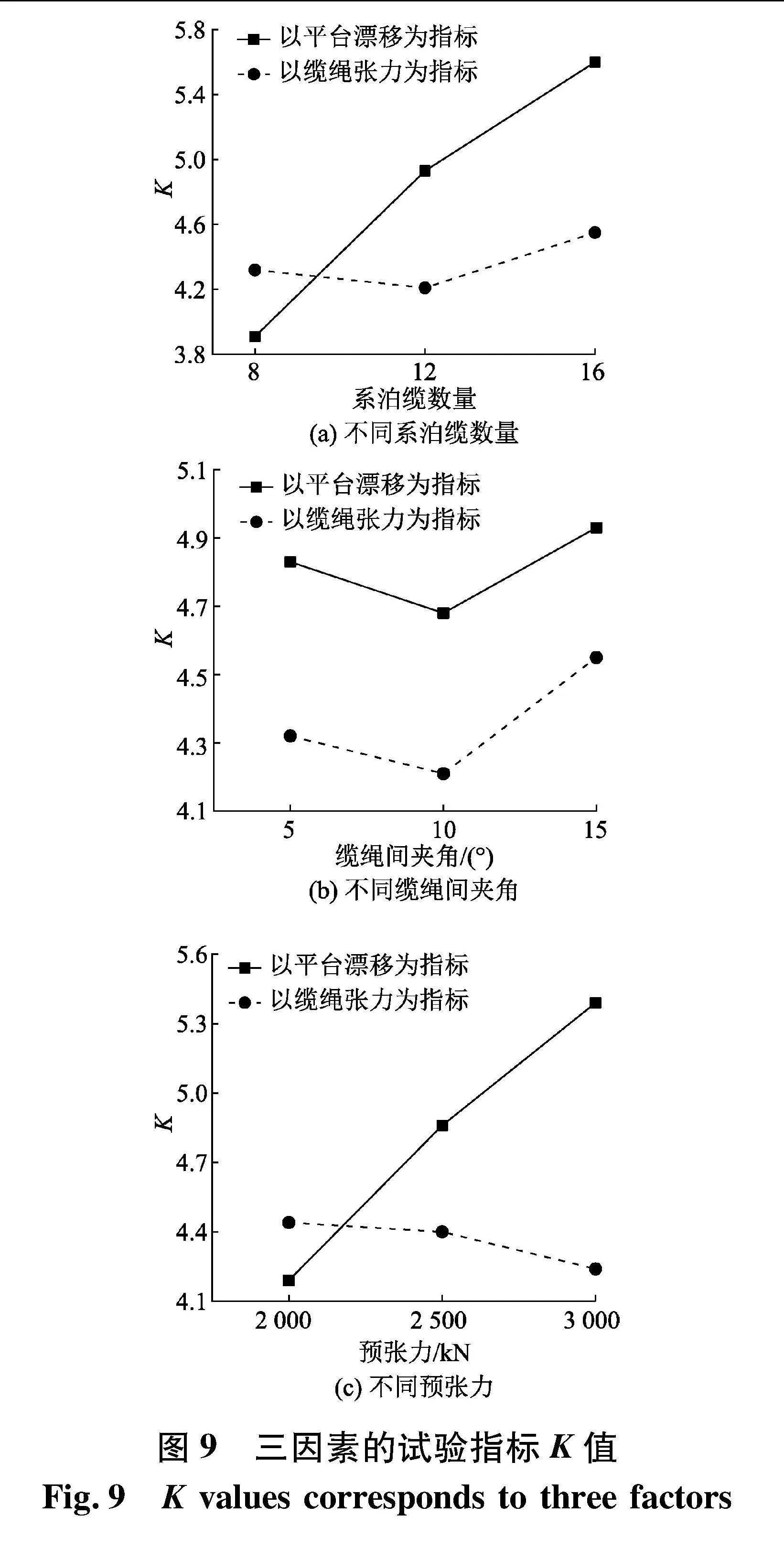
选用漂移量指标和安全系数计算试验指标K值,以各因素水平为横坐标,试验指标K值为纵坐标,绘制试验指标随因素水平变化的趋势,如图9.K值为正交试验中某一因子的漂移量指标或安全系数之和,K值越大表明平台的水平漂移越小或缆绳张力越小,即平台越安全.
从图9(a)可以看出,当系泊缆从8根增加到12根时,漂移量试验指标从3.91增加到4.9 增加幅度较大,缆绳安全系数无明显变化;当系泊缆从12根增加到16根时,漂移量试验指标和缆绳安全系数均小幅增加.考虑到增加系泊缆数量会增加人力、物力、财力的投入,当缆绳张力在规范值以内而平台漂移过大时应优先选用12根锚链并采用其他方式减小平台漂移;若缆绳张力和平台漂移均超出规范值,再考虑选用16根锚链.
从图9(b)可以看出,随着系泊缆组内夹角的增大,漂移量试验指标和缆绳张力试验指标呈非单调变化.当系泊缆组内夹角从5°增大到10°时,漂移量试验指标和缆绳张力试验指标均小幅降低;而当系泊缆组内夹角从10°增大到15°时,两指标明显升高.因此,对于本钻井平台而言,系泊系统优先考虑15°布锚.
从图9(c)可以看出,增大缆绳的预张力会导致漂移量试验指标增大而缆绳张力试验指标减小.当预张力从2 000 kN增加到2 500 kN时,漂移量试验指标大幅增加,缆绳张力试验指标略有减小,这意味着平台的水平漂移大幅降低,缆绳张力稍有增大.当预张力从2 500 kN增加到3 000 kN时,漂移量指标增长趋势变小,缆绳张力试验指标的降低趋势变大,即以牺牲缆绳张力试验指标换取平台漂移试验指标的效果变差.预张力3 000 kN对应的锚链总长为2 060 m,而当锚链总长低于2 040 m时预张力会超过正常作业允许的张力,考虑到工程误差、系泊缆绳疲劳以及极地环境碎冰、冰脊等对系泊系统的冲击作用,预张力过大并不安全[21].因此对于文中研究的系泊系统,预张力优先选择2 500 kN;如漂移量过大而缆绳安全系数仍有富余,可在规范允许的范围内适当增加预张力.
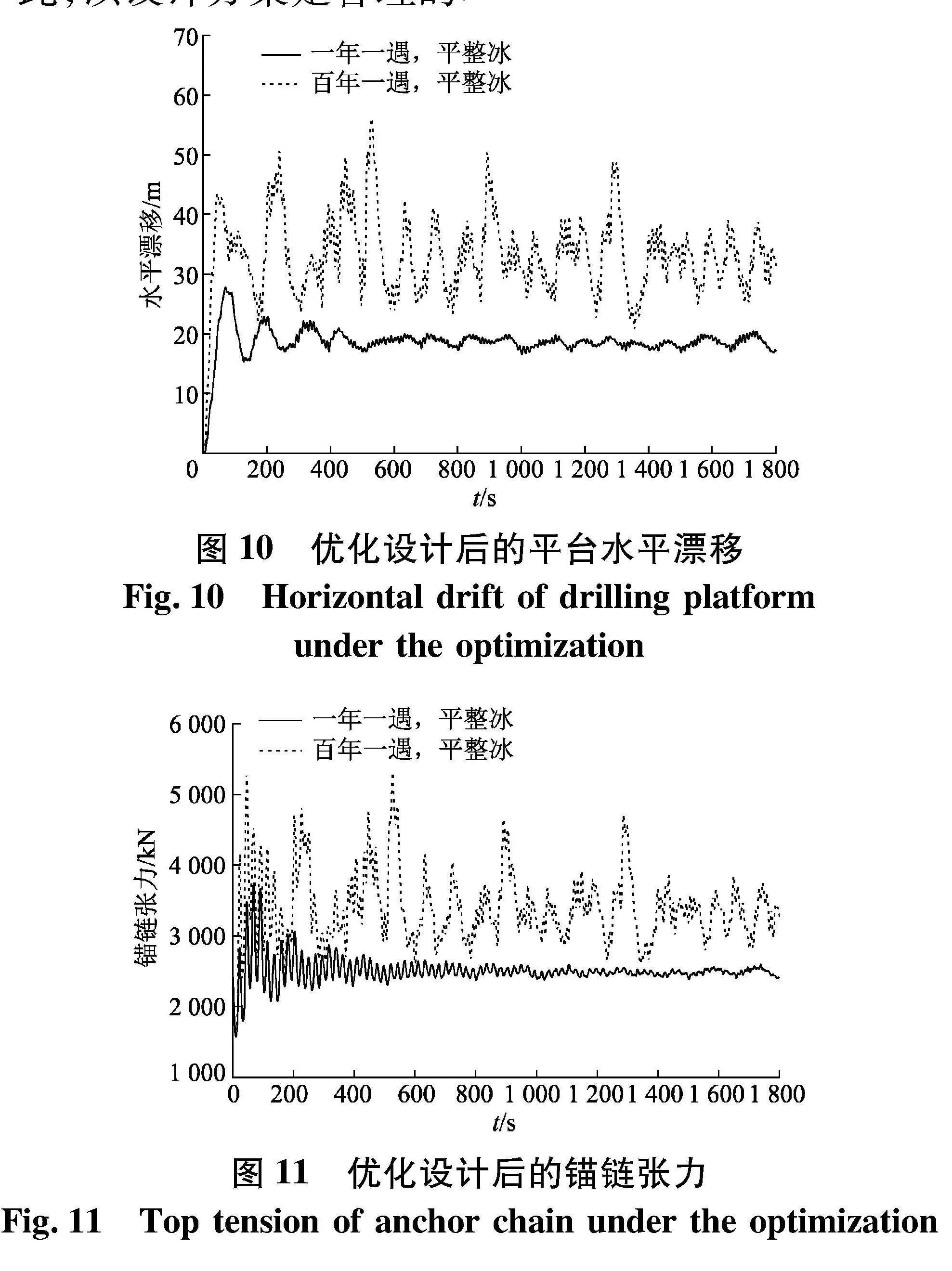
综上,文中选择12根锚链、15°锚链夹角和2 500 kN预张力进行数值模拟,得到该设计方案在一年一遇、百年一遇海况与平整冰联合作用下的水平漂移和锚链张力时间历程如图10、11.在一年一遇海况和平整冰联合作用下,平台最大漂移约为27.80 m,缆绳最大张力约为3 745.35 kN,均满足平台正常作业的要求;在百年一遇海况和平整冰联合作用下,平台最大漂移约为56.06 m,缆绳最大张力约为5 317.58 kN,均满足平台自存要求.因此,该设计方案是合理的.
6" 结论
对极地海冰与钻井平台相互作用过程进行数值模拟,得到平台受到的冰载荷,通过系泊分析软件分别得到极地某海域无冰和有平整冰情况下平台的动力响应,并设计正交试验对平台系泊系统进行了优化设计.
(1) 不论何种工况,极地0.6 m厚平整冰环境下钻井平台的漂移量和系泊缆张力均比无冰环境高300~400 kN,故经抗冰改造的敞水钻井平台在投入使用前进行抗冰性能分析是非常必要的;
(2) 平整冰对平台动力响应的影响随着海况的增大而降低,海况较平稳时平台水平漂移受冰载荷影响相对较大,海况恶劣时平台水平漂移受冰载荷影响相对较小,如四级海况有冰环境的漂移约为无冰环境得4倍,而百年一遇有冰环境仅略大于无冰环境;
(3) 通过正交试验法获得的系泊系统设计方案为12根锚链、15°锚链夹角和2 500 kN预张力,该方案能够使平台在一年一遇海况和平整冰联合作用下正常作业,在百年一遇海况和平整冰联合作用下自存;
(4) 在文中选定的8~16根系泊缆、4°~15°锚链夹角和2 000~3 000 kN预张力参数范围内,增加系泊缆数量能够显著降低平台的水平漂移、小幅度降低缆绳张力;提高缆绳预张力能够降低平台的水平漂移,但会增大缆绳的张力,降低安全系数.
(5) 文中的研究成果可为实际工程提供参考,如在初步设计方案下平台漂移量过大而缆绳安全系数较高,可以考虑适当增大预张力;再如平台漂移量过大同时缆绳安全系数较低,可以采用16根锚链.文中研究的作业环境工况有限,因此在投入实际海洋工程应用前,还需深入调研极地钻井平台实际作业海况,并结合冰水池模型试验,从而给出更切合实际的系泊设计方案.
参考文献(References)
[1]" BIRD K J, CHARPENTIER R R, GAUTIER D L, et al. Circum-arctic resource appraisal: Estimates of undiscovered oil and gas north of the Arctic Circle[R]. US:US Geological Survey, 2008.
[2]" 刘大辉, OVE T G, 白勇,等. 极地冰区海上钻井平台发展趋势研究[J]. 水利科学与寒区工程, 2019, 2(1): 66-73.
[3]" RISKA K, PATEY M, KISHI S, et al. Influence of ice conditions on ship transit times in ice[C]∥Proceedings of the International Conference on Port and Ocean Engineering Under Arctic Conditions .Ottawa , Canada:[s.n.], 2001: 729-745.
[4]" KERULIN E B," KARULINA M M. Numerical and physical simulations of moored tanker behaviour[J]. Ships and Offshore Structures, 2011, 6(3): 179-184.
[5]" ZHOU L, SU B, RISKA K, et al. Numerical simulation of moored ship in level ice[C]∥International Conference on Offshore Mechanics and Arctic Engineering. Rotterdam, The Netherlands:[s.n.],2011:855-863.
[6]" ZHOU L, SU B, RISKA K, et al. Numerical simulation of moored structure station keeping in level ice[J]. Cold Regions Science and Technology, 2012, 71: 54-66.
[7]" JI S Y, LI Z L, LI C H, et al. Discrete element modeling of ice loads on ship hulls in broken ice fields[J]. Acta Oceanologica Sinica, 2013, 32(11): 50-58.
[8]nbsp; SEO D C, PALLARD R. A numerical study of interaction between ice particles and complex ship structures[C]∥Arctic Technology Conference." Newfoundland and Labrador, Canada:[s.n.], 2016.
[9]" ZHOU L, CHUANG Z J, BAI X. Ice forces acting on towed ship in level ice with straight drift, Part II: Numerical simulation[J]. International Journal of Naval Architecture and Ocean Engineering, 2018, 10(2): 119-128.
[10]" 刁峰, 周利, 周伟新, 等. 极地钻井船系泊冰阻力与运动响应数值模拟研究[J]. 中国造船, 2018, 59(4): 115-123.
[11]" 孙丽萍, 王冬庆, 艾尚茂. 浮式抗冰平台设计理念及水动力特性研究[J]. 船舶工程, 2015,37(S1): 230-233,306.
[12]" 杨佳东, 吕海宁, 王晋. 碎冰条件下单点系泊船舶动态响应特性研究[J].海洋工程,2019,37(2):29-39.
[13]" 王莹, 李红霞, 黄一, 等. 冰区核电平台系泊设计及影响研究[J]. 船舶力学, 2021,25(5):619-626.
[14]" 张大勇, 于东玮, 王国军, 等. 半潜式海洋平台抗冰性能分析[J]. 船舶力学,2020,24(2):208-220.
[15]" GU Y, ZHOU L, DING S, et al. Numerical simulation of ship maneuverability in level ice considering ice crushing failure[J].Ocean Engineering,2022,251:111110.
[16]" 吴群彪, 曹阳, 蔡李花, 等. 汽车前围板前部拉延成型模拟及组合参数优化[J]. 江苏科技大学学报(自然科学版), 2020, 34(1): 34-40.
[17]" 刁峰, 周伟新, 周利. 极地船连续破冰阻力数值模拟研究[J]. 中国造船, 2021, 62(1):11-27.
[18]" 窦培林, 朱建, 陈刚, 等. 风浪流成长全过程单点系泊FPSO运动低频响应极值研究[J]. 江苏科技大学学报(自然科学版), 2014, 28(2): 114-119.
[19]" 吴仁豪, 嵇春艳, 程勇, 等. 一种浮式防波堤与风机一体化装置设计与性能分析[J]. 江苏科技大学学报(自然科学版), 2022, 36(5): 1-7.
[20]" XV K, LARSEN K, SHAO Y, et al. Design and comparative analysis of alternative mooring systems for floating wind turbines in shallow water with emphasis on ultimate limit state design[J]. Ocean Engineering, 2021, 219: 108377.
[21]" 陈嘉明, 白兴兰, 杨风艳. 浮体二阶运动下钢悬链式立管触地区动态响应分析[J]. 海洋工程, 2022,40(6):133-141.
(责任编辑:贡洪殿)