强跟踪容积卡尔曼滤波在空空导弹制导中的应用
2024-11-19梁津鑫唐奇崔颢张公平




摘 要: 针对传统滤波算法在处理目标复杂机动时非线性逼近能力不足、 跟踪精度下降等问题, 提出一种强跟踪容积卡尔曼滤波(STCKF)方法。 首先, 根据战斗机规避空空导弹的机动特征, 建立了蛇形机动和桶滚机动两种目标运动模型; 其次, 引入强跟踪滤波(STF)以增强容积卡尔曼滤波(CKF)对系统状态突变等不确定因素的能力; 然后, 将STCKF应用于导弹末制导目标运动参数估计中, 并通过与CKF、 无迹卡尔曼滤波(UKF)和粒子滤波(PF)的对比仿真分析验证了该方法的有效性。 仿真结果表明, STCKF具有较强的鲁棒性和系统自适应能力, 尤其在目标机动突变时其跟踪误差相比CKF减小约10%, 能够满足空空导弹末制导高精度和快速响应要求。
关键词: 容积卡尔曼滤波; 强跟踪滤波; 非线性滤波; 目标跟踪; 空空导弹; 制导
中图分类号: TJ765; V249
文献标识码: A
文章编号: 1673-5048(2024)05-0082-06
DOI: 10.12132/ISSN.1673-5048.2024.0004
0 引 言
随着新型推力矢量涡扇发动机、 先进气动设计、 双向数据链和隐身技术的应用, 未来空战目标的机动能力更强、 逃逸方式更复杂、 可探测性更差, 使得空空导弹精确制导面临严峻挑战[1]。 由于导引头测量数据有限且噪声干扰严重, 无法直接满足精确制导需求, 采用滤波算法对目标信息进行快速准确估计成为确保精确制导的关键。 通常采用笛卡尔坐标系描述目标运动状态, 但视线角等观测信息在极坐标系中获取, 这使得将目标状态映射到观测数据的观测方程呈非线性。
近年来, 基于贝叶斯理论的非线性系统状态估计方法已经得到广泛且深入的研究。 目前, 扩展卡尔曼滤波[2](EKF)和无迹卡尔曼滤波[3](UKF)被广泛应用于机动目标跟踪领域。 文献[4]基于EKF进行了雷达/红外双模制导仿真研究; 文献[5]考虑到EKF精度较低, 将弹目相对运动建模为噪声协方差自适应的“当前”统计模型, 并基于UKF对一般机动目标进行了跟踪仿真研究。 但在处理高度非线性和强机动目标时, 这两种方法面临非线性逼近能力的不足。 相比于EKF和UKF, Arasaratnam等[6]提出的容积卡尔曼滤波(CKF)具有更好的非线性逼近性能、 数值精度以及稳定性。
在空空导弹末制导阶段, 目标机动复杂多变。 导弹制导系统必须具备快速响应和适应目标机动突变的能力, 以确保对目标的有效追踪和精确打击。 然而, 上述滤波算法很可能出现因为目标机动突变时滤波模型不准确而导致的跟踪精度下降和估计偏差。 为减少算法对模型准确性的过度依赖, 基于新息的自适应滤波方法[7]相继被提出。 其中, 强跟踪滤波(STF)通过自适应渐消因子实时调整增益矩阵, 可以自适应地减小估计偏差, 具有较强的鲁棒性和应对系统状态突变等不确定因素的能力[8]。 文献[9]将STF与CKF相结合, 提出强跟踪容积卡尔曼滤波(STCKF)算法; 文献[10-15]将STCKF应用于复杂机动目标跟踪中, 验证了STCKF对目标机动突变的快速响应能力。
本文将STCKF应用于空空导弹末制导目标运动参数估计中, 并与典型非线性滤波算法进行对比研究。
1 基本模型
目前, 关于战斗机机动决策的研究[16]大多针对空空导弹自身的不足而展开。 通常, 空空导弹为减少燃料重
收稿日期: 2024-01-04
基金项目: 航空科学基金项目(201901012008)
*作者简介: 梁津鑫(1998-), 女, 河南洛阳人, 硕士研究生。
量, 只在制导前段进行推进, 之后则依靠舵翼和惯性进
行制导; 在面对高机动目标时, 比例导引法可能会导致
过载较大、 命中时间变长等问题。 因此, 针对空空导弹制导末端能量有限、 转向机动能力不足等劣势, 战斗机可利用自身能量优势以躲避来袭导弹攻击。
蛇形机动和桶滚机动是战斗机规避空空导弹的两种典型机动形式。 蛇形机动通过高g力曲线飞行促使导弹进行急剧转向, 这可能导致导弹超出其过载限幅, 失去稳定性或被迫脱离对目标的追踪。 桶滚机动可以描述为飞机在前进方向上作匀速直线运动, 在竖直平面内作圆周运动。 桶滚机动能够迫使导弹采取更长的追踪路径, 这可能导致导弹耗尽其能量并失去追踪能力。 本文选取蛇形机动、 桶滚机动这两种机动形式来验证STCKF在制导系统中的效能。
1.1 蛇形机动模型航空兵器
采用离散线性差分方程描述蛇形机动, 状态方程为
Xk=FXk-1+Gwk-1+uk-1 (1)
式中: Xk=[x, y, z, x·, y·, z·, x¨, y¨, z¨]T; wk-1是均值为0的高斯白噪声向量; uk-1为系统机动输入量;
F=
100T00T2200
0100T00T220
00100sin(ωT)ω001-cos(ωT)ω2
000100T00
0000100T0
00000cos(ωT)00sin(ωT)ω
000000100
00000001000000-ωsin(ωT)00cos(ωT);
G=T36000T36000ωT-sin(ωT)ω3T22000T220001-cos(ωT)ω2T000T000sin(ωT)ω。
1.2 桶滚机动模型
文献[17]在特定坐标系下将桶滚机动建模为
xt=vtt
yt=-atcos(ωt)/ω2
zt=atsin(ωt)/ω2 (2)
将式(2)写为微分方程形式, 且将转弯角速率ω视为状态变量之一, 可得到以下非线性状态方程:
x¨t=0
y¨t=-ω2yt
z¨t=-ω2zt
ω·=wt (3)
式中: wt为系统噪声。
假设用于桶滚机动建模的坐标系与惯性坐标系的三轴方向一致, 仅坐标原点不同。 在滤波过程中, 将目标在惯性坐标系下的位置通过坐标平移转换至建模坐标系下求解非线性状态方程, 完成求解后再转换回惯性坐标系下进行滤波的其他计算步骤。
1.3 观测方程
选取视线方位角、 视线俯仰角和弹目相对距离作为雷达导引头的观测信息, 建立观测方程:
Zk=h(Xk)+Vk (4)
式中: Zk= [φ, ε, r]T; Vk是均值为0、 协方差阵为Rk的高斯白噪声向量, Rk=σ2φ00
0σ2ε0
00σ2r; h(·)为非线性函数, h(Xk)=-arctanzrxr
arctanyrx2r+z2r
x2r+y2r+z2r, xr, yr, zr为目标和导弹在三个方向上的相对距离。
2 非线性滤波
2.1 非线性滤波方法的分类
非线性滤波处理非线性模型的方法主要可以归纳为四类: 线性化方法、 确定性采样方法、 随机采样方法和混合分布方法。
线性化方法将非线性问题做线性化处理, 再根据线性滤波理论求解, 如EKF。 但在复杂系统中, 模型的线性化误差会严重影响滤波精度, 甚至导致滤波发散。
确定性采样方法通过选择一组代表性的点来近似非线性变换, 并利用这些点来传播均值和协方差, 如UKF和CKF。 但UKF在估计高维非线性状态过程时可能因Sigma点参数选择不当而引起滤波发散和精度下降。 而CKF无需选择任何采样参数, 利用三阶球面—径向容积积分准则, 通过一组对称分布且相等权重的容积点来近似状态变量的后验概率密度函数, 不会出现 UKF在估计高维非线性状态过程时因参数选择不当而引起的滤波发散[18]。
随机采样方法使用随机样本来近以整个非线性过程, 如粒子滤波[19](PF)。 PF通过一组在状态空间中传播的随机样本来近似状态变量的后验概率密度函数。 由于非参数化的特点, PF适用于任何能用状态空间模型表示的非高斯非线性随机系统。 但是PF的计算量较大, 难以应用于实时性要求较高的系统中。
混合分布方法使用混合分布来近似非高斯或多模态分布, 如高斯求和滤波(GSF)。 但GSF在处理无显著特征的非高斯或多模态分布时优势并不明显。
因此, 本文选取UKF, CKF, PF与STCKF在目标蛇形机动和桶滚机动场景下进行性能对比。
2.2 强跟踪容积卡尔曼滤波
STF是建立在输出残差序列正交性原理之上的卡尔曼滤波器。 其基本原理是: 通过对状态预测协方差阵引入渐消因子, 在线实时调整增益矩阵, 强迫输出的残差序列正交, 从而将残差序列中的有效信息完全提取出来。 因此, STF算法针对不准确模型系统具有较强的鲁棒性。
非线性STF算法的核心结构仍然为
x^k+1=x^k+1/k+Kk+1γk+1(5)
式中: x^k+1和x^k+1/k分别为状态估计值和状态预测值; Kk+1为卡尔曼增益; γk+1=zk+1-z^k+1/k为测量残差, zk+1为测量真实值, z^k+1/k为测量预测值。 将STF用于CKF时, 其渐消因子λk+1的计算方法[9-10]为
λk+1 = max1, tr (Nk+1)tr(Mk+1)(6)
Nk+1=V0,k+1-Hk+1QkHTk+1-γRk+1 (7)
Mk+1=Hk+1Pxk+1/kHTk+1(8)
Hk+1=(Pxz, lk+1/k)T(Plk+1/k)-1(9)
Pxz, lk+1/k=∑2nxi=0wi(χlk+1/k, i-x^k+1/k)(h(χlk+1/k, i)-z^k+1/k)T(10)
V0, k+1=γ1γT1 k=0
ρV0, k+γk+1γTk+11+ρk≥1 (11)
式中: Pxk+1/k为未考虑渐消因子和系统噪声方差阵的状态预测误差协方差阵, Plk+1/k为考虑系统噪声方差阵的状态预测误差方差阵, 两者关系为Plk+1/k=Pxk+1/k+Qk; Pxz, lk+1/k为未考虑渐消因子的互协方差阵; nx为状态向量的维数; wi=1/2nx为每个容积点对应的权值; χlk+1/k, i为未考虑渐消因子的状态预测x^k+1/k产生的容积点; Nk+1, Mk+1, Hk+1, V0, k+1均为计算过程参数矩阵; γ≥1为弱化因子, 一般靠经验选取; ρ为遗忘因子, 一般取0.95≤ρ≤0.995。
在标准CKF的时间更新和测量更新中引入STF, 即可构造STCKF。
根据式(6)~(11)计算得到的渐消因子λk+1, 预测状态误差方差阵被调整为
Pk+1/k=λk+1Pxk+1/k+Qk (12)
根据xk+1加入渐消因子下的统计特性N(xk+1; x^k+1/k, Pk+1/k), 计算更新后的状态容积点χk+1/k, i, i=1, 2, …, 2nx。
Pk+1/k=Sk+1/kSTk+1/k, χk+1/k, i=Skξi+x^k+1/k (13)
式中: 容积点ξi=nx[1]i, i=1, 2, …, 2nx。 [1]i表示一个容积点集的第i个元素, 其由状态向量空间的一组基向量的全排列和符号变化而得来。
容积点经量测函数传播, 得到引入渐消因子后的自协方差阵Pxzk+1/k和互协方差阵Pzzk+1/k。
ξk+1, i=h(χk+1/k, i)(14)
z~k+1/k=∑2nxi=0wiξk+1, i (15)
Pxzk+1/k=∑2nxi=0wi(χk+1/k, i-x^k+1/k)(ξk+1, i-z~k+1/k)T (16)
Pzzk+1/k=∑2nxi=0wi(ξk+1, i-z~k+1/k)(ξk+1, i-z~k+1/k)T+Rk(17)
调整后的滤波增益Kk+1为
Kk+1=Pxzk+1/k(Pzzk+1/k)-1 (18)
根据式(5)得到更新后的状态估计x^k+1。 误差协方差阵Pk+1更新为
Pk+1=Pk+1/k-Kk+1Pzzk+1/kKTk+1 (19)
3 仿真与分析
3.1 仿真设定
蛇形机动时的弹目运动参数如表1所示。 目标在t1=5 s, t2=10 s时存在机动突变, 其余时刻无机动突变。
制导律: 考虑目标加速度的扩展比例导引, Ne=3
桶滚机动时的弹目运动参数如表2所示。 目标在机动过程中转弯角速率随时间缓慢增加。
为充分发挥不同滤波器的性能, 在不同仿真场景下蛇形机动和桶滚机动的基本参数设置存在差异。 滤波器参数如表3所示。
在仿真中, UKF采用比例对称采样方法[3], 参数α, β和κ影响Sigma点的分布: α用于控制Sigma点的分散程度, 较小的值使Sigma点更加接近均值, 较大的值使其更加分散, 且0≤α≤1; β与目标分布的高阶矩的一致性有关, β=2是对于高斯分布的最优选择; κ主要影响远离均值的Sigma点的权重, 当系统的状态估计存在较大不确定性或模型可靠性较低时取κ=3-nx, 反之, 可取κ为0。 PF设置了较大的粒子数以保证算法具有较高精度, 且采用系统重采样方法来避免粒子退化问题[19]。
此外, 为保证不同滤波算法之间具有可比性, 假设4种滤波器在每次蒙特卡洛实验中的初始状态估计和初始状态估计误差方差阵一致, 在同一时刻所受观测噪声相同。 观测噪声标准差σφ和σε均为0.02 rad, σr为50 m。 仿真步长T为0.02 s, 蒙特卡洛实验次数n为100。 若任意滤波算法下的弹目距离小于3 m, 结束本次实验。
3.2 算法评估指标
在n次蒙特卡洛实验中, 用状态估计的均方根误差(RMSE)衡量滤波算法的估计精度, 用单步滤波平均执行时间衡量滤波算法的计算效率。
位置均方根误差、 速度均方根误差及加速度均方根误差的计算公式分别为
ep=1n∑ni=1[(x^i-xi)2+(y^i-yi)2+(z^i-zi)2] (20)
ev=1n
∑ni=1[(x·^i-x·i)2+(y·^i-y·i)2+(z·^i-z·i)2](21)
ea=1n∑ni=1[(x¨^i-x¨i)2+(y¨^i-y¨i)2+(z¨^i-z¨i)2] (22)
单步滤波平均执行时间计算公式为
t-k=1n∑ni=11steps∑stepsk=1(tk)(23)
3.3 结果与分析
(1) 场景1: 目标蛇形机动
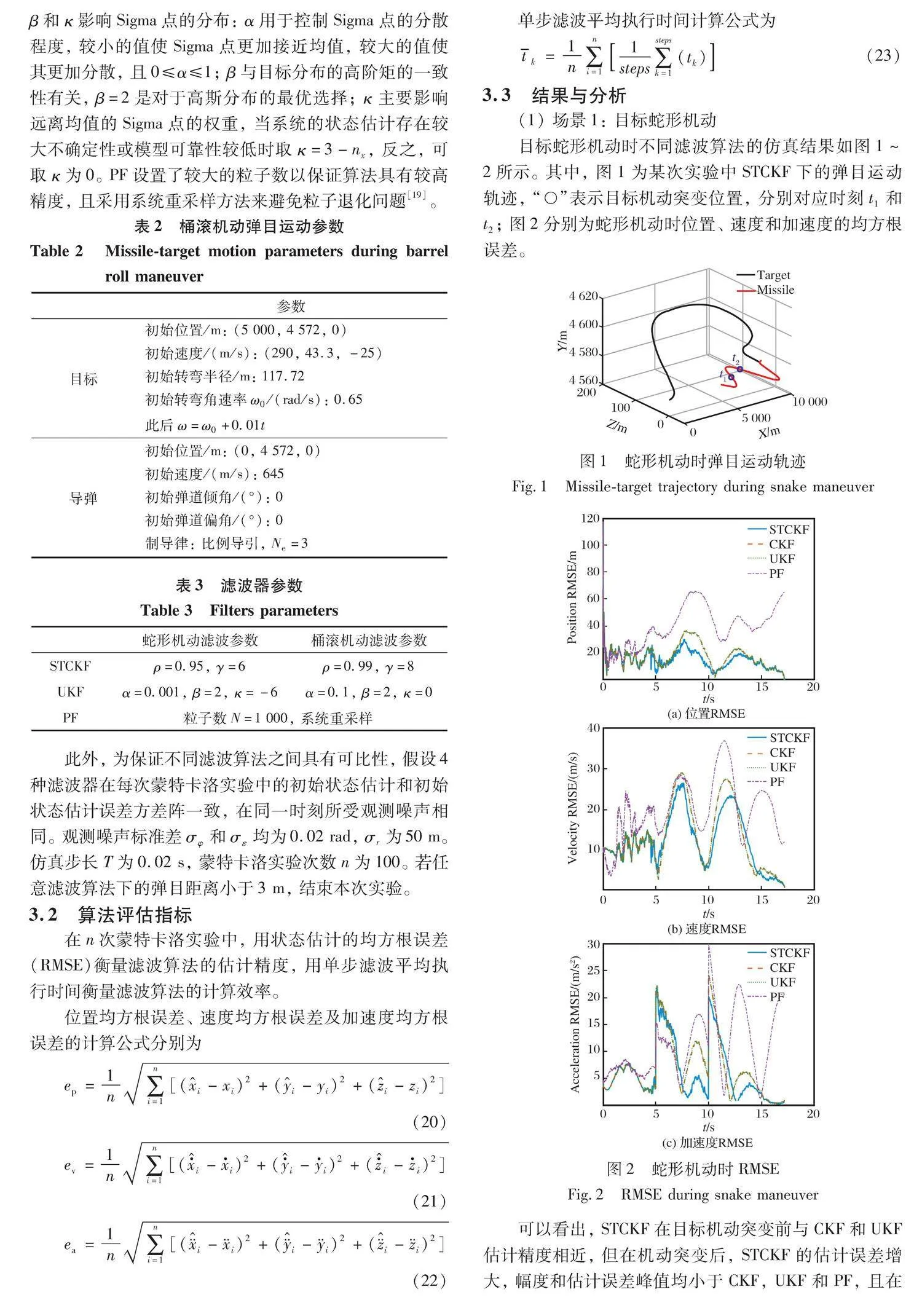
目标蛇形机动时不同滤波算法的仿真结果如图1~ 2所示。 其中, 图1为某次实验中STCKF下的弹目运动轨迹, “○”表示目标机动突变位置, 分别对应时刻t1和t2; 图2分别为蛇形机动时位置、 速度和加速度的均方根误差。
可以看出, STCKF在目标机动突变前与CKF和UKF估计精度相近, 但在机动突变后, STCKF的估计误差增大, 幅度和估计误差峰值均小于CKF, UKF和PF, 且在之后一段时间内保持了较低的估计误差, 这说明STCKF对于状态突变具有较强的跟踪能力。 在目标机动突变后, STCKF通过使用渐消因子, 可以提高较为准确的测量信息在滤波测量更新中的比重, 同时降低模型失准导致的预测误差, 从而使跟踪精度得到提高。
此外, 以上仿真结果还表明基于确定性采样的滤波算法在系统非线性程度较低时性能较优。 PF作为一种非参数化方法, 在处理非线性程度较低的系统时无法凸显其优势。
(2) 场景2: 目标桶滚机动
目标桶滚机动时不同滤波算法的仿真结果如图3~ 4所示。 其中, 图3为某次实验中STCKF下的弹目运动轨迹; 图4为桶滚机动时位置和速度的均方根误差。
可以看出, STCKF与CKF具有几乎一致的估计精度, 在大部分时间内它们的估计精度高于PF, 而UKF出现滤波发散。
在目标无机动突变时, STCKF与CKF的估计精度几乎相当。 这是由于此时输出残差的方差较小, 导致STCKF求得的渐消因子趋近或等于1, STCKF几乎退化为标准CKF。 CKF通过在状态空间中对称布置采样点, 能够更均匀地捕获非线性函数的特性。 而UKF受到采样点先验参数设置的影响, 在维度较高的状态空间中无法充分捕获非线性特性, 从而导致滤波发散。 PF在系统非线性程度较高时展示出与STCKF和CKF相似的估计精度, 但在导弹逼近目标时性能下降。 这是由于PF的过度重采样导致有效粒子的多样性降低, 从而影响滤波性能。
在计算效率方面, 表4展示了4种算法在两种场景下的单步滤波平均执行时间。
可以看出, STCKF的计算效率低于CKF和UKF, 但远高于PF。 在目标桶滚机动时, PF需要对每个粒子执行一次非线性状态方程求解, 使得其计算负担显著增加。 而UKF由于采样参数限制导致滤波发散, 其中某些计算和数据校正步骤被省略和简化, 显示出比CKF更短的单步滤波平均执行时间。 虽然CKF对目标桶滚机动的跟踪性能较好, 但在目标蛇形机动且存在机动突变时, 其对机动突变的响应能力远不如STCKF。 综合来看, STCKF的适应性和鲁棒性较好, 且满足系统实时性要求。
4 结 论
本文将STCKF应用于空空导弹末制导目标运动参数估计中, 基于不同目标机动进行了仿真验证, 得出以下结论:
(1) 将STCKF与CKF, UKF, PF进行对比研究, 并采用目标蛇形机动和桶滚机动两种场景进行仿真分析, 能够有效验证STCKF对不同复杂程度模型的处理能力和目标机动突变的适应能力。
(2) 仿真结果表明, 对于存在机动突变、 系统非线性程度较低的蛇形机动, 相比于其他3种算法, STCKF具有更高的跟踪精度和更好的鲁棒性; 对于无机动突变、 系统非线性程度较高的桶滚机动, STCKF在大部分时间退化为标准CKF, 但跟踪精度高于PF和UKF。 综合来看, STCKF具有较强的系统自适应能力, 能够满足空空导弹末制导高精度和快速响应要求。
(3) 在仿真实验中发现, STCKF的性能一定程度上依赖于其参数的设置, 不恰当的参数调整有可能导致其性能下降。
参考文献:
[1] 纪毅, 王伟, 张宏岩, 等. 面向高机动目标拦截任务的空空导弹制导方法综述[J]. 航空兵器, 2022, 29(6): 15-25.
Ji Yi, Wang Wei, Zhang Hongyan, et al. A Survey on Guidance Method of Air-to-Air Missiles Facing High Maneuvering Targets[J]. Aero Weaponry, 2022, 29(6): 15-25.(in Chinese)
[2] Saha M, Ghosh R, Goswami B. Robustness and Sensitivity Metrics for Tuning the Extended Kalman Filter[J]. IEEE Transactions on Instrumentation and Measurement, 2014, 63(4): 964-971.
[3] 潘泉, 杨峰, 叶亮, 等. 一类非线性滤波器——UKF综述[J]. 控制与决策, 2005, 20(5): 481-489.
Pan Quan, Yang Feng, Ye Liang, et al. Survey of a Kind of Nonlinear Filters-UKF[J]. Control and Decision, 2005, 20(5): 481-489. (in Chinese)
[4] 刘广哲, 张科, 吕梅柏, 等. 基于扩展卡尔曼滤波算法的双模制导仿真研究[J]. 航空兵器, 2018(1): 27-32.
Liu Guangzhe, Zhang Ke, Lü Meibo, et al. Dual-Mode Guidance Simulation Research Based on the Extended Kalman Filtering Algorithm[J]. Aero Weaponry, 2018(1): 27-32. (in Chinese)
[5] 崔彦凯. 改进的CS-UKF加速度方差自适应跟踪算法[J]. 计算机测量与控制, 2017, 25(5): 215-217.
Cui Yankai. Modified Acceleration Variance Adaptive Tracking Algorithm of CS-UKF[J]. Computer Measurement & Control, 2017, 25(5): 215-217.(in Chinese)
[6] Arasaratnam I, Haykin S. Cubature Kalman Filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269.
[7] 徐树生, 林孝工. 基于鲁棒CKF的多传感器全信息融合算法[J]. 电机与控制学报, 2013, 17(2): 90-97.
Xu Shusheng, Lin Xiaogong. Multi-Sensor All Information Fusion Algorithm Based on Robust CKF[J]. Electric Machines and Control, 2013, 17(2): 90-97.(in Chinese)
[8] 刘玉磊, 冯新喜, 鹿传国, 等. 带渐消因子的Quadrature卡尔曼滤波[J]. 宇航学报, 2013, 34(10): 1370-1377.
Liu Yulei, Feng Xinxi, Lu Chuanguo, et al. A Fading Quadrature Kalman Filter for Nonlinear Systems[J]. Journal of Astronautics, 2013, 34(10): 1370-1377.(in Chinese)
[9] 霍光, 李冬海, 李晶. 基于强跟踪容积卡尔曼滤波的单站无源跟踪算法[J]. 现代雷达, 2013, 35(11): 52-57.
Huo Guang, Li Donghai, Li Jing. A Single Observer Passive Tracking Algorithm Based on Strong Tracking Cubature Kalman Filter[J]. Modern Radar, 2013, 35(11): 52-57.(in Chinese)
[10] 崔乃刚, 张龙, 王小刚, 等. 自适应高阶容积卡尔曼滤波在目标跟踪中的应用[J]. 航空学报, 2015, 36(12): 3885-3895.
Cui Naigang, Zhang Long, Wang Xiaogang, et al. Application of Adaptive High-Degree Cubature Kalman Filter in Target Tracking[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(12): 3885-3895.(in Chinese)
[11] 方君, 戴邵武, 许文明, 等. 基于ST-SRCKF的超高速强机动目标跟踪算法[J]. 北京航空航天大学学报, 2016, 42(8): 1698-1708.
Fang Jun, Dai Shaowu, Xu Wenming, et al. Highly Maneuvering Hypervelocity-Target Tracking Algorithm Based on ST-SRCKF[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8): 1698-1708.(in Chinese)
[12] Liu H, Wu W. Strong Tracking Spherical Simplex-Radial Cubature Kalman Filter for Maneuvering Target Tracking[J]. Sensors, 2017, 17(4): 741.
[13] Zhang H W, Xie J W, Ge J A, et al. Adaptive Strong Tracking Square-Root Cubature Kalman Filter for Maneuvering Aircraft Tracking[J]. IEEE Access, 2018, 6: 10052-10061.
[14] Wang J, Zhang T, Xu X, et al. A Variational Bayesian Based Strong Tracking Interpolatory Cubature Kalman Filter for Maneuver-ing Target Tracking[J]. IEEE Access, 2018, 6: 52544-52560.
[15] Zhang A, Bao S D, Gao F, et al. A Novel Strong Tracking Cubature Kalman Filter and Its Application in Maneuvering Target Tracking[J]. Chinese Journal of Aeronautics, 2019, 32(11): 2489-2502.
[16] 包为禹. 针对空中威胁目标的战斗机动力学建模及机动决策研究[D]. 武汉: 华中科技大学, 2021.
Bao Weiyu. Research on Fighter Dynamics Modeling and Maneuvering Decision for Air Threat Targets[D]. Wuhan: Huazhong University of Science and Technology, 2021. (in Chinese)
[17] Imado F, Miwa S. Three Dimensional Study of Evasive Maneuvers of a Fighter Against a Missile[C]∥Astrodynamics Conference, 1986.
[18] 王小旭, 潘泉, 黄鹤, 等. 非线性系统确定采样型滤波算法综述[J]. 控制与决策, 2012, 27(6): 801-812.
Wang Xiaoxu, Pan Quan, Huang He, et al. Overview of Deterministic Sampling Filtering Algorithms for Nonlinear System[J]. Control and Decision, 2012, 27(6): 801-812.(in Chinese)
[19] 程水英, 张剑云. 粒子滤波评述[J]. 宇航学报, 2008, 29(4): 1099-1111.
Cheng Shuiying, Zhang Jianyun. Review on Particle Filters[J]. Journal of Astronautics, 2008, 29(4): 1099-1111.(in Chinese)
Application of Strong Tracking Cubature Kalman
Filter in Air-to-Air Missile Guidance
Liang Jinxin1*, Tang Qi2, Cui Hao1, 3, Zhang Gongping1, 3
(1. China Airborne Missile Academy, Luoyang 471009, China;
2. Unit 93160 of PLA, Beijing 100076, China;
3. National Key Laboratory of Air-based Information Perception and Fusion, Luoyang 471009, China)
Abstract: A strong tracking cubature Kalman filter(STCKF) method is proposed to overcome the challenges of insufficient nonlinear approximation capability and decreased tracking accuracy of traditional filtering algorithms in dealing with complex maneuvering targets. Firstly, models for snake maneuver and barrel roll maneuver are developed based on the maneuvering characteristics of fighter aircraft evading air-to-air missiles. Secondly, strong tracking filter(STF) is introduced to enhance the ability of cubature Kalman filter(CKF) to handle sudden changes in system states and other uncertainties. Then, STCKF is applied to estimate the motion parameters of missile terminal guidance target, and its effectiveness is validated through comparative simulation analysis with CKF, unscented Kalman filter(UKF), and particle filter(PF). Simulation results indicate that STCKF has enhanced robustness and adaptive capabilities, especially when the target maneuver suddenly changes, its tracking error is reduced by about 10% compared to CKF, which can meet the high precision and rapid response requirements of air-to-air missile terminal guidance.
Key words: cubature Kalman filter; strong tracking filter; nonlinear filtering; target tracking; air-to-air missile; guidance