走向融通学习:基于“超级个体”的未来学习形态探赜
2024-11-19石豫湘卢锋
摘 要:技术的迅猛发展使人类社会对虚拟和现实连接的需求达到了有史以来的极点。这种连接的需求促使人类与机器充分融合,进而出现人类智慧与机器智能融通的新型主体——“超级个体”(Mega-Individuals)。“超级个体”的诞生使得一种新型学习形态——融通学习(Consilience Learning)成为可能。融通学习是指在富技术环境支持下,融合了生物属性和技术属性的“超级个体”在线上与线下打通、虚拟与现实交织的学习空间中,利用开放流通、虚实联动的学习资源,通过人机共融的交互过程,获得跨界融合、全境感知体验的学习方式。它具有学习空间融通、学习资源融通、学习交互融通、学习体验融通等特点。未来,在扩展现实、元宇宙等技术的支撑下,“超级个体”可以选择以不同“身”进行学习,从而形成形式丰富的融通学习模式,包括“真身+分身”融通的虚拟学习、“真身+替身”融通的物理学习、“真身+分身+替身”融通的虚实学习等。尽管融通学习的未来图景还只是基于科幻教育研究范式的虚拟想象,但是这种想象不仅对于审视当下的教与学、改造现实的教育大有裨益,也可能为未来教育的创造性发展提供启示和灵感。
关键词:超级个体;融通学习;学习形态
作者简介:石豫湘,南京邮电大学教育科学与技术学院硕士研究生(南京 210023);卢锋,南京邮电大学教育科学与技术学院院长、教授(南京 210023)
基金项目:国家社会科学基金项目2020年度一般项目“增强香港青少年国家认同的全媒体传播网络建构研究”(项目编号:20BXW071)
中图分类号:G442 文献标识码:A 文章编号:1009-458x(2024)11-0017-14
一、引言
2020年,在教育部的推动下,可持续的混合学习模式成为高等教育教学新常态。然而,混合学习的复杂特征,使得一线教师往往仅在表面上做到线上与线下学习的简单结合(沈霞娟 等, 2022),并未实现“有机”混合;线上线下教学情境中,线上教学的外部约束性削弱,对学业时间投入形成挤出效应,导致学业时间占比降低15.17%(鲍威 等, 2021);源于线上与线下两层皮的实践困境,混合学习还存在浅层低效、交互不足的问题(卢国庆 等, 2023),延迟的形成性反馈可能还会对学生成绩造成负面影响(Demaidi et al., 2019)。这些问题,促使学者开始深入思考如何构建新型学习形态,以适应当前的学习需求。
技术是改变学习形态的推手(祝智庭 等, 2023; 刘邦奇 等, 2024; 唐玉溪 & 何伟光, 2020; 岳伟 & 苏灵敏, 2023)。当前,技术的迅猛发展使人类社会对虚拟和现实连接的需求达到了有史以来的极点。这种连接的需求促使人类与机器充分融合,进而有可能实现人类智慧与机器智能的相互融合。2022年清华大学发布的《元宇宙发展研究报告2.0》,阐述了自然人、虚拟人以及机器人三者融合共生的可能。这三者融合共生而成的新型主体,可称之为“超级个体”(Mega-Individuals, MIs)。“超级个体”的诞生将使得一种新型学习形态——融通学习(Consilience Learning)成为可能。在这一学习形态中,“超级个体”通过“真身+分身”“真身+替身”“真身+分身+替身”等多种方式实现线上与线下融合、虚拟与现实打通的学习。本研究旨在分析融通学习的内涵、特征并构建学习模式,为满足多样化学习需要创造新的可能,为探索学习新生态的构建提供全新的契机,为促进学习理论的发展搭建实践的桥梁。
二、融通学习的概念肇始
进入21世纪,随着网络的普及和 e-Learning的发展,混合学习(Blended Learning)成为备受关注的学习形态。自2013年起,由美国高等教育信息化协会(EDUCAUSE)发布的《地平线报告》指出,无论是基础教育版还是高等教育版,混合学习都是其中提出的重要技术趋势。混合学习的 “混合”并非泛化意义上技术的混合、理论的混合抑或媒体的混合,而是指传统面对面教学和基于因特网的学习的混合。然而,经过一系列的教育实践,教育工作者发现简单的组合或结合形成的混合学习在本质上是割裂的,学习者仍是线上利用资源、线下获取服务。
为了解决这种“割裂”,一种新的学习形态——线上线下融合(Online-Merge-Offline,OMO)学习被提出。与强调“混合”(Blend)的混合学习不同,线上线下融合学习进一步模糊了线上与线下的界限,形成了完全融合(Hybrid)的状态。然而,无论是混合学习抑或线上线下融合学习,都存在着学习者“缺场”互动、教师反馈不及时导致学习者临场感不强、归属感被削弱等症结,致使尚未达到理想的学习效益。究其根本,是因为“身体”这一认知世界的核心要素被漠视。依靠即时、丰富、感性化的语音和图像支持技术,学习者可以在轻触智能手机屏幕或者点击鼠标的瞬间立刻在场,但在线下的时空中身体并不在场,在身体的实践中仍是一种“缺场”共在(李伟 & 卫子昊, 2023)。的确如此,从“混合”至“融合”,可发现学习模式正寻求其关键要素在虚拟与现实中整全性的融合和贯通。
从进化论的视角看,可以发现,人类智能的发展是在将认知任务逐渐卸载(offloading)给技术、工具的过程中得以实现的。时移势迁,人类智能与技术的融合变得更加深入和复杂。技术或将构成身体的第二起源,身体表现出向技术进化的过程。正如未来学家雷·库兹韦尔(Kurzeil, R.)在著名的《奇点临近》中的预测,人类将与机器联合,即嵌入我们大脑的知识和技巧,将与我们创造的容量更大、速度更快、知识分享能力更强的智能相结合(Kurzeil, 2011, p.11)。这一前瞻性预测虽然只是未来的一种可能,但近年来人机融合、人机共创等概念的涌现,都反映了人类和机器彼此协同以达到特定实践目的的价值取向(黄荣怀 等, 2023)。见时知己,个体生命注定将与技术“耦合”共同进化,有可能达到人们很难区分虚拟与现实、技术与身体、人与机器人的界限(李政涛 & 罗艺, 2019)。未来,当这种界限模糊至不可见,将呈现出人机共生、虚实相融的崭新图景。人机共生不仅意味着机器“拟人化”特征的凸显,还包含了人也被赋予了增其智能发展的深刻意蕴,最终二者将实现“1+1>2”的效果。当硅基生命体与碳基生命体实现高度融合(詹泽慧 等, 2023),个体也将实现其智能与机器赋能双重加持的全面智能发展,最终将超越人类现有的生物极限。如脑机接口之父米格尔·尼科莱利斯(Nicolelis, M.)基于神经生理学可塑性原则和同化原则提出一种新身体意向观,即大脑主动塑造了自我感以及身体存在的边界,……会将人造工具同化为自己的一部分,成为与身体无缝对接的真实外延(何伦凤 & 朱谦, 2023)。在脑机接口等技术或设备的支持下,个体的身份将扩展为多重身份融合的身份系统,即上文所述的“超级个体”(MIs)。这一新型主体既具备身体特性又具备技术特性,能够超越学习在时间和空间上的限制,实现身体和精神的“共在”。因而“超级个体”成为融通学习这一未来学习形态实现的基础。与英国哲学家威廉·休厄尔(Whewell, M.)所著《归纳科学的哲学观》一书中“融通”(Consilience)(爱德华·威尔逊, 2016, p.14.)对未来知识景观的前瞻性设想类似,本文中的融通学习是对未来学习景观的预见性构拟——融通超越了混合与融合,打通人与机、线上与线下的隔阂,实现虚拟与现实的连接,为未来学习形态提供了一个崭新视角。
三、融通学习:未来学习的新形态
融通学习是随着可穿戴设备、虚拟现实等新技术突进和实践中即将出现的“多种身体形式与多重在场方式”(张刚要 & 陈煜, 2023)而逐渐形成的。这一学习形态有望通过技术与身体的深度融合、学习要素的全结构化融通,实现个体在身体与心智上的全面发展。融通学习是对未来学习形态的一种设想,体现了人机共融学习的趋势。
(一)融通学习的内涵
融通学习是指在富技术环境支持下,融合了生物属性和技术属性的“超级个体”在线上与线下打通、虚拟与现实交织的学习空间中,利用开放流通、虚实联动的学习资源,通过人机共融的交互过程,获得跨界融合、全境感知体验的学习方式。这一内涵包括以下三个要点。
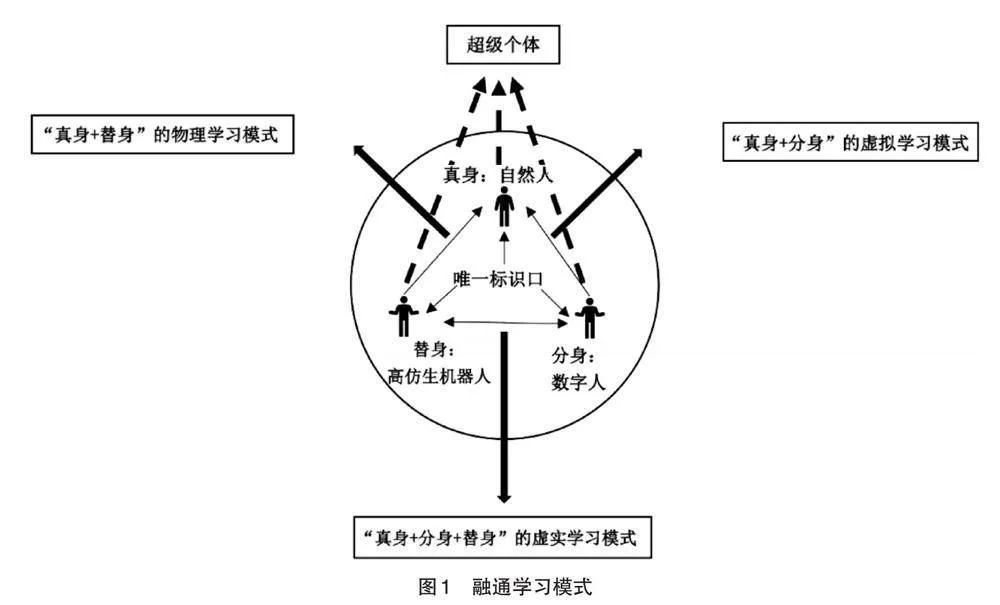
一是学习者身份的生物属性与技术属性融通。身份的生物属性与技术属性融通的合理依据,自古以来便有迹可循。从颜回“堕肢体,黜聪明,离形去知,同于大通”(意指忘却自己的形体,抛弃自己的聪明,摆脱形体和智能的束缚,与大道融通为一)(郭庆藩, 2016, p.282)主张“体”消融于“身”,到庄子“凿浑沌”(人为干预自然本真的状态)、“修浑沌”(顺应自然、不进行人为干预),看重技术与身体感知觉的协调(何光顺, 2022),从麦克卢汉(McLuhan, M.)的“媒介即人的延伸”到唐·伊德(Ihde, D.)的“技术身体”,从多媒体等技术延伸身体的视听觉到虚拟现实、扩展现实等技术不断尝试扩展身体的多重经验,都意在打通技术经验与身体经验的界限,技术已不再是人的外部装置,而是逐渐深嵌于身体经验。未来的个体是作为“真身”的自然人叠加作为“分身”的数字人以及作为“替身”的高仿生机器人形成的新型主体——“超级个体”。其中,自然人或称为真身,即技术哲学领军人物唐·伊德所说“能动的、知觉的和情感性的在世存在的”、区别于虚拟存在的、人体的实际物质形态(Ihde, 2002, p.24)。自然人作为整个学习的核心,为其所有的学习行为负责。分身或称为数字人,指通过数字孪生技术将自然人形象映射在虚拟空间形成的数字化形象。数字人与自然人具有身份同一性的关联,且可在多个时空同时存在,实现学习者“分身有术”,可视为真身在虚拟空间的分身。分身将想象性的身份补偿和具身认知补偿转化为现实(吕健 & 孙霄兵, 2022),承载了自然人的精神补偿与寄托。替身或称为高仿生机器人,是模仿真人制造的机器人(彭影彤 等, 2023)。高仿生机器人受自然人异地远程控制,完成真身受空间限制而无法完成的任务,可视为真身在物理空间的替身。由自然人、数字人、高仿生机器人形成的“超级个体”兼具技术特性和身体特性,其身份也从一切现实关系的总和扩展为现实关系、虚拟关系多重关系的总和。
二是学习者身体经验与所处情境融通。技术的不断发展在允许学习时空分离的同时也使学习者的身体不断脱域,在一定程度上隐匿了身体的存在。身心的不可分割决定了人类应以完整的人进行学习,这在一定程度上呼唤着学习者身体的回归。身体是使不可见之物隐喻式地显现为在场之物的重要媒介(孙玮,2018),用身体及其感觉能把陌生的、异质的、不可见的事物转化成可感觉的、可见的、可理解的事物(艾曼努埃尔·埃洛阿, 2016, pp.145-159)。在技术的作用下,人的感官系统得以延伸,通过连接在身体不同部位的传感器和VR等终端设施,技术嵌入身体,使身体能够感受到场景刺激,其动作也可以反作用于场景,身体随之成为交互的终极媒介。换言之,身体将成为融通学习时的一种信息交流符号,使“超级个体”之间的互动不再以语言、文字等抽象符号表征为主,而是以身体语言这一更为直观的表征方式传递学习时的情绪与状态。此时,“超级个体”将产生“在场”的知觉体验,实现“身体复归”于情境。
三是学习者身体与心智发展融通。与其他学习方式不同,融通学习可创造身体和心智统一的条件,帮助学习者实现知觉身体层面和内心精神层面的“双高”。自然人在技术的加持下形成“技术的身体”(Ihde, 2002, p.24),获得技术延伸的具身经验。作为技术加持下形成的新个体,“超级个体”“在场”理解学习内容及其意义的过程是一种具身学习。当“超级个体”的身体进入学习场域,其获得的学习体验将激活生理体验,使得身体向空间“外化”的同时也被“内化”,即“颈部以下”的介入反过来影响心智。尤其是融通学习为“超级个体”创设对其发展和生活有意义的情景时,这些情景将促使“超级个体”不由自主地投入学习中,主动将其所有的经验、感知、情感活动交织在一起,最终实现身体与心智融为一体,自然相通地发展。
值得注意的是,“超级个体”的学习并非仅仅通过外部嵌入的技术接受、感知信息以代替其身体完成物理世界的活动。相反,“超级个体”在学习过程中受到与其个人相关联情境的驱动,因此能主动与知识互动,获得超越时空的物质性体验。如此,融通学习将超越“钵中之脑”的观念,使“超级个体”能够通过身体的参与和感知更全面地理解知识、掌握技能,最终完成意义建构。
(二)融通学习的特征
基于以上对融通学习内涵及要点的分析,可以概括出融通学习的特征,包括学习空间融通、学习资源融通、学习交互融通、学习体验融通。
1. 学习空间融通
学习空间融通,即线上和线下打通,虚拟和现实交融,可允许“超级个体”在物理空间、虚拟空间以及虚实共生空间任意切换。
第一,融通学习空间是线上和线下打通的。借助算力技术,融通学习空间将实现跨越时空的不同场域的连接,线上与线下一体贯通、无缝衔接。“超级个体”的学习可呈现线上与线下的一致性与流畅性,线上学习结束时的“断点”即为线下学习的“始点”。另外,无论身在何处,“超级个体”可足不出户与其他各地的“超级个体”相连通,在同一学习空间跨域学习。
第二,融通学习空间是虚拟和现实交融的。学习空间的技术嵌入,不但促进了物理空间和信息空间之间的融合,而且使得融合的门槛和成本越来越低(杨现民 等, 2020)。基于此,融通学习空间将具备物理空间和虚拟空间桥接、形成虚实融通的“中间地带”的条件。此“中间地带”呈现出物理空间和虚拟空间适配并如卯榫结构般紧密交融的空间形态,既具有物理空间的现实实在性,也具有虚拟空间的无限可能性。
2. 学习资源融通
学习资源融通,即学习资源在学习空间中呈现开放流通、虚实联动的状态。
第一,所谓开放流通,是指融通学习中,学习者在任何时空都可自由访问、编辑学习资源。这就意味着,学习者从被动的知识“消费者”转变为主动的知识“生产者”。这一身份的转变使得学习者可以创造出源源不断、大规模的知识内容。当学习者通过去中心化的知识网络获得学习资源并对其进行建构时,这些资源便转化为新的学习资源,成为其他学习者进行意义建构的对象,由此促进了资源在学习空间中的不断涌现与流通。
第二,所谓虚实联动,是指融通学习中的资源从线上和线下存在明确边界逐渐转向边界消融、虚拟和现实平行扩充。这得益于分布式账本可保障学习过程中生产的内容在虚拟世界和现实世界中顺利流通(朱珂 等, 2022)的特性。此外,鉴于孪生技术可映射出物理世界的实际需求,也可通过各类传感器将行为个体关键性能数据传递给其数字系统(姚伟 等, 2022),学习者便可将其在物理空间中生产出的知识资源或人工制品映射为虚拟空间的学习资源。反之,虚拟空间的数据、信息等资源可实体化作用于物理世界,实现资源的虚实联动。
3. 学习交互融通
学习交互融通,即“超级个体”之间人际交流互动畅通无限制,“超级个体”内部人机信息交互自然无障碍。
第一,人际交流互动畅通无限制。在融通学习中,人际交流不再受制于时间和空间的限制。尽管“超级个体”天各一方,但真身仍可选择以分身、替身的方式进行“面对面”交流。这种“面对面”的交流不再相隔一道屏幕,冰冷的文字在增加了语音、形象、动作后变得更有温度。此外,与真身形象完全相同的分身、替身在帮助真身与其他个体进行跨时空交互时,缩小了真身与分身、替身的心理距离感,避免了真身由于分身、替身与其现实身份不一致而产生的虚拟社交弱势。这使得真身返回鲜活的现实世界时,可以将借由替身、分身获得的交互经验与物理世界其他真身进行正常交互,从而免于真身陷入沉溺虚拟空间的漩涡。
第二,人机信息交互自然无障碍。在脑机接口等技术的支持下,人机交互将走向“自然”“智能”“自由”,形成语言交互、触控交互、声控交互、动作交互、眼动交互、多模式交互等自然交互的方式(顾小清 等, 2023)。当真身选择以分身或替身进行互动时,虽然看似是以其他“身”作为中介,但由于真身与分身、替身形成了紧密的融合互通的关系,“真身+分身”“真身+替身”“真身+分身+替身”三者之间的信息交互也达到了流畅自如的状态。
4. 学习体验融通
学习体验融通,即“超级个体”在学习过程中获得虚实跨界融合、多感官联通的全境感知体验。
第一,“超级个体”在融通学习中获得虚实跨界融合的学习体验。融通学习囊括了虚拟空间和物理空间的所有学习和实践。以技术为中介的沉浸式网络实现了虚拟世界与物理世界的全方位融通,使学习者的诸多学习体验逐渐朝虚拟境域转变抑或进入一种虚实跨界形态中(覃祖军 等, 2022)。虚拟状态下,人们的知觉经验特别是肉身性的知觉经验,已经能在一定程度上被实体性的自我直接感知到(路强, 2022)。而“超级个体”以其身体为界面,真身借助分身、替身等人造工具,从心理体验上将分身、替身同化为身体的一部分。三“身”之间的交互将持续共振,以此达到身体空间的虚拟延展,使得真身能同时感知物理世界和虚拟世界,赋予真身虚实跨界融合的学习体验。此体验是通过分身与真身深度交融生成一种新型沉浸式的具身“在场”体验(申灵灵 等, 2023),使真身在心理上获得“感同身受”。
第二,“超级个体”在融通学习中通过多感官联通获得全境感知的学习体验。融通学习中的学习者利用视觉、听觉、触觉、嗅觉、动觉等多种感官捕捉、理解学习空间中的信息,从而获得虚实共生的学习体验。当真身借助可穿戴智能设备或脑机接口进入学习空间,其真身与分身相连,能够从不同的视角、以不同的角色进行观察、实践、练习,获得立体感官体验。通过多感官的联通,学习者的身体将纳入学习的全过程,成为感知与认知的整合器。这种整合使得学习者能够将身体感知到的、与环境互动获得的学习体验延展至整个学习空间,即实现身体、感知和环境的有机整合与融通。
四、基于“超级个体”的融通学习模式
学习模式是指依据一定的理论基础表征活动和过程的一种模型或形式,既表现为一种结构(各种教学要素之间的稳定关系),也表现为一种程序(活动步骤的先后次序)(钟志贤 & 孙菊如, 2007)。融通学习模式是以具身认知、体验学习、人机协同学习等理论为基础,通过对学习空间、学习资源等促进条件的优化设计,形成一系列促进学习者身心合一发展的学习活动组合。
(一)融通学习模式的理论基础
1. 具身认知理论
具身认知理论认为有效的知识学习是认知主体充分整合环境与身体的生理资源,促使身体与认知对象及其所处环境发生互动并达到动态平衡的过程(范文翔 & 赵瑞斌, 2020)。据此,融通学习模式需要创设具身学习环境,促进真身的身心沉浸于环境并与之互动。这就需要3D/4D渲染、数字孪生、VR/MR/XR等技术创设富有沉浸感的学习空间。同时,为了促进学习者将视觉、听觉、触觉和动觉等方面的体验深刻融入知识表征系统(Lan et al., 2015),融通学习模式需要可穿戴设备、传感设备等硬件设备和多模态人机交互技术的支持,允许真身以“身”为媒,通过语音、手势、触摸等与学习环境自然交互。如此,身体这一核心要素便纳入了融通学习过程中。
2. 体验学习理论
1984年,大卫·库伯(Kolb, D. A.)提出了体验学习理论,指出学习或知识的获取是人们对直接经验或间接经验进行反思、归类、条理化和复制的过程(Kolb, 1984, p.21)。据此,融通学习需要设计逼真的学习情境为真身创造身临其境之感,从而促进真身的知识生成。在物理、虚拟或虚实共生空间中,真身借助分身、替身进行知识的探索、检验和验证。通过这一过程,真身将获得的具身经验整合至其认知体系。随后,通过观察和反思,真身形成对知识的个人理解,并主动将新概念应用于具体情境,以进一步验证并发展其知识结构。
3. 人机协同学习理论
人机协同学习理论源于协同学理论,强调结构永远处于形成、消失、竞争、协作或者组成更大结构的过程中,协同会经历无序、近平衡、远平衡、涨落和有序状态的迭代(李海峰 & 王炜, 2023)。根据协同学理论,形成“超级个体”这一稳定的结构,需要真身与分身、替身之间动态交互,不断适应和调整,最终增强真身的学习能力。真身需要了解自己的学习需求和能力界限,根据分身、替身的反馈做出最优的学习决策。
(二)基于“超级个体”的融通学习模式设计
通过人类与技术的耦合,“超级个体”展现出前所未有的特性。鉴于这种特性富有强烈的未来色彩,本研究依托具身认知、体验学习、人机协同学习理论,采用科幻教育研究范式,运用想象、幻想等科幻文学创作的手法,描绘未来教育、未来学校的图景(谭维智, 2022):在扩展现实、元宇宙等富技术环境支撑下,“超级个体”可以选择以不同“身”进行学习,从而形成形式丰富的融通学习模式,包括“真身+分身”融通的虚拟学习、“真身+替身”融通的物理学习、“真身+分身+替身”融通的虚实学习等(如图1所示)。本研究以适切学习模式的情景为例,描述上述三种学习模式的学习过程。其中,“超级个体”这一核心是开展融通学习的主体,学习资源、学习空间以及学习全过程的技术支持(人工智能、动态重建、多模态人机交互、数字孪生、MR/XR)等因素均是开展融通学习的必要条件。
1.“真身+分身”融通的虚拟学习模式
“真身+分身”融通学习,是指作为自然人的“真身”与作为数字人的“分身”融为一体,在交互与共振下完成知识学习、技能掌握的一种学习模式。
(1)“真身+分身”融通的机理
“真身”与“分身”的融通,是因为二者之间的互动将产生“普罗透斯效应”(指现实世界中的人会受到在虚拟世界建构的自我形象的影响),从而实现学习主体分身与真身在身份上的同一性(闫君子 & 张家军, 2023),即真身从心理上产生分身是其一部分的认同感。正如博特威尼克(Botvinick, M.)和科恩(Cohen, J.)的实验所证明的,如果橡胶手的形状、质地、颜色与真手相似,并且摆放姿势一致,就能使研究对象产生强烈错觉,将橡胶手误认为是真手,进而产生橡胶手属于身体的归属感(Botvinick & Cohen, 1998)。又如海德格尔(Heidegger, M.)提出的“锤子”与梅洛-庞蒂(Merleau-Ponty, M.)提出的“盲人的拐杖”,分身是自然人身体的一部分,是身体的延展(张敬威 & 苏慧丽, 2021)。同理,与真身的行为、动作完全同步的分身,不仅在视觉信息,还在听觉、嗅觉等多种信息的冲击下,会将本体感觉抑制到完全将分身的行为视为真身自己的行为,从而实现真身与分身在心理上的融通。从技术实现而言,学习者通过VR眼镜、站立式VR设备和触感手套进入虚拟空间后,其行为将映射到学习者设定的数字分身上,分身所看所触即成为学习者的视觉和触觉体验。
(2)“真身+分身”融通的虚拟学习过程
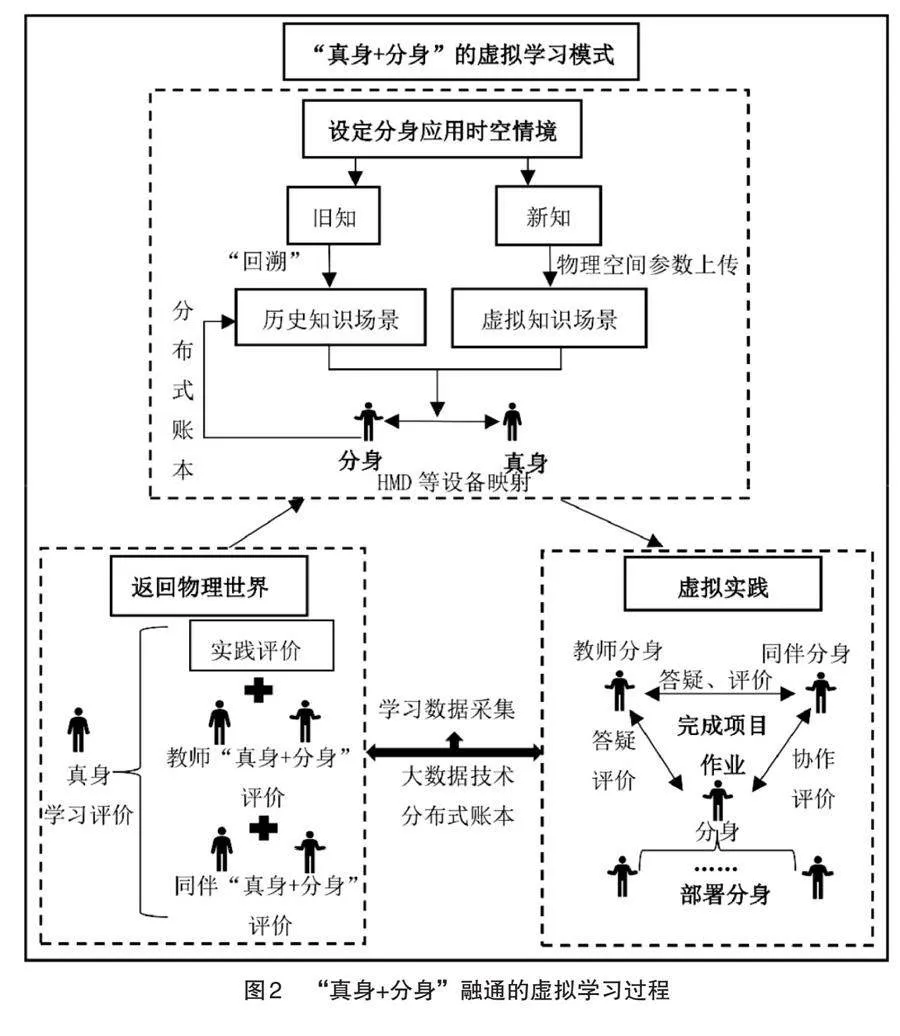
“真身”与“分身”融通的虚拟学习适用于需要较高成本或存在较大危险的、学习者在时间、空间上不可及或受到一定限制的知识或技能的学习,例如消防技能、核安全技能的学习等。这种学习过程包括三个可迭代循环部分(如图2所示)。
首先,设定分身应用的时空情境。例如,在核安全课程的“放射线测量”实验中,为了学习核辐射剂量测量和评估的相关知识,同时避免核辐射对人体健康造成的影响,真身可借助分身回溯到虚拟的历史场景中(如切尔诺贝利核电站事故现场),使用虚拟放射线测量仪等设备测量虚拟核反应堆的核辐射值;或跨越到未来的学习场景,掌握发生核事故时应急响应的基本技能和措施。
其次,进行虚拟实践。师生借由扩展现实、数字孪生等技术将身体符号化至虚拟空间,将自己的感觉信息传输至分身(曹青云 & 部凡, 2023),真身就能够通过外在的输入设备控制虚拟环境中的分身,实现虚拟环境中的具身体验和协作交流(李海峰 & 王炜, 2016)。例如,学习者可借助分身在虚拟空间进行放射线实验,也可将多个分身部署到不同的学习环境中并行多个学习任务,如同时测量放射线强度、控制放射线方向等。分身的所有学习过程及学习情况的所有记录以标准化的方式被记录在“分布式账本”中(吴莎莎 等, 2018)。如果学习者在学习过程中未掌握相关知识和技能,则可通过分布式账本技术查找学习记录。如此,真身便可借助分身“穿越”回到当时的学习场景,重新体验和学习未巩固的知识或技能。在学习过程中,学习者分身之间可构成协作学习关系,共同完成教师布置的虚拟实践项目并进行同伴互评。同时,教师分身在其中扮演答疑解惑者的角色,也可对学生的学习表现及行为进行评价或奖惩。分身在虚拟空间中获得的数字积分、奖励等通过系统统一设定的转换机制转为物理世界的实体奖励,以促进学习者保持学习的积极性。
最后,返回物理世界。在对放射线实验的操作已达到熟练水平后,学习者重新回到物理世界验证学习效果。学习者借助分身进行的学习活动保存在大数据、分布式账本等技术创设的高质量数据采集与传输系统中。由于“回溯”与“跨越”完全基于学习者自身需求,因此整个学习过程并非线性的,而是可迭代循环的。学习者每一次“回溯”与“跨越”进行的虚拟实践都将通过数字孪生“创建平行体系”(朱珂 等, 2020),保存平行分支中分身的行为记录,形成学习记录集,便于学习者后续设定时空情境。最终,对学习者的评价由学习者进行项目实践时的大数据分析评价、虚拟实践和物理实践时教师、学生真身及分身所做的评价共同构成。
当然,“真身+分身”的融通学习也存在一些问题和挑战。首先,虚拟空间的安全性是一个需要重点考虑的因素。分身的数据和身份的安全应得以保障,以防止被恶意利用。其次,真身与分身融通的应用范围和适用性也需要进一步探索和完善。物理空间仍是真身的主要栖息所,真身对分身的使用也需要有一定的约束,不可滥用。
2.“真身+替身”融通的物理学习模式
“真身+替身”融通学习,是指作为自然人的“真身”远程控制作为高仿生机器人的“替身”,通过信息流通、体感传递进行无缝协作的一种学习模式。
(1)“真身+替身”融通的机理
“真身”与“替身”的融通是基于信息的双向流转机制和体感传递实现的。如麻省理工学院媒体实验室将外部化的媒体通过一系列感官传递给用户(戴维·斯特利, 2021, p.183),可见自然人与机器人之间不仅可以进行信息的流转,而且在感官上也可实现传递。其一,信息在真身和替身之间双向流转。借助智能终端设备全周期、全方位的个性化数据搜集和捕捉,人机实时联结成为可能(李静 & 刘蕾,2021)。真身控制替身活动时,其动作、表情等信息被真身所穿戴的头戴式显示器(HMD)等全身感应设备实时捕捉、编码后通过唯一端口传送至个人学习空间。替身获取从个人学习空间编码后的数字化信息,通过其携带的摄像机识别三维图像并将其传递到HMD,使得真身和替身可以人机实时共享画面和操作,从而实现信息的双向流转。其二,真身与替身之间可以进行体感传递。视觉、听觉等体感通过摄像机、HMD等设备进行传递。嗅觉、味觉则可通过先进的算法、传感器经由数字化编码后(殷丙山 & 高茜, 2017; 杨霞, 2024)成为数字信号上传。当真身接入替身的端口,便可获取替身远程传递的实时图像、声音、数字嗅觉和味觉,真身与替身实时共享信息,无缝协作。
(2)“真身+替身”融通的物理学习过程
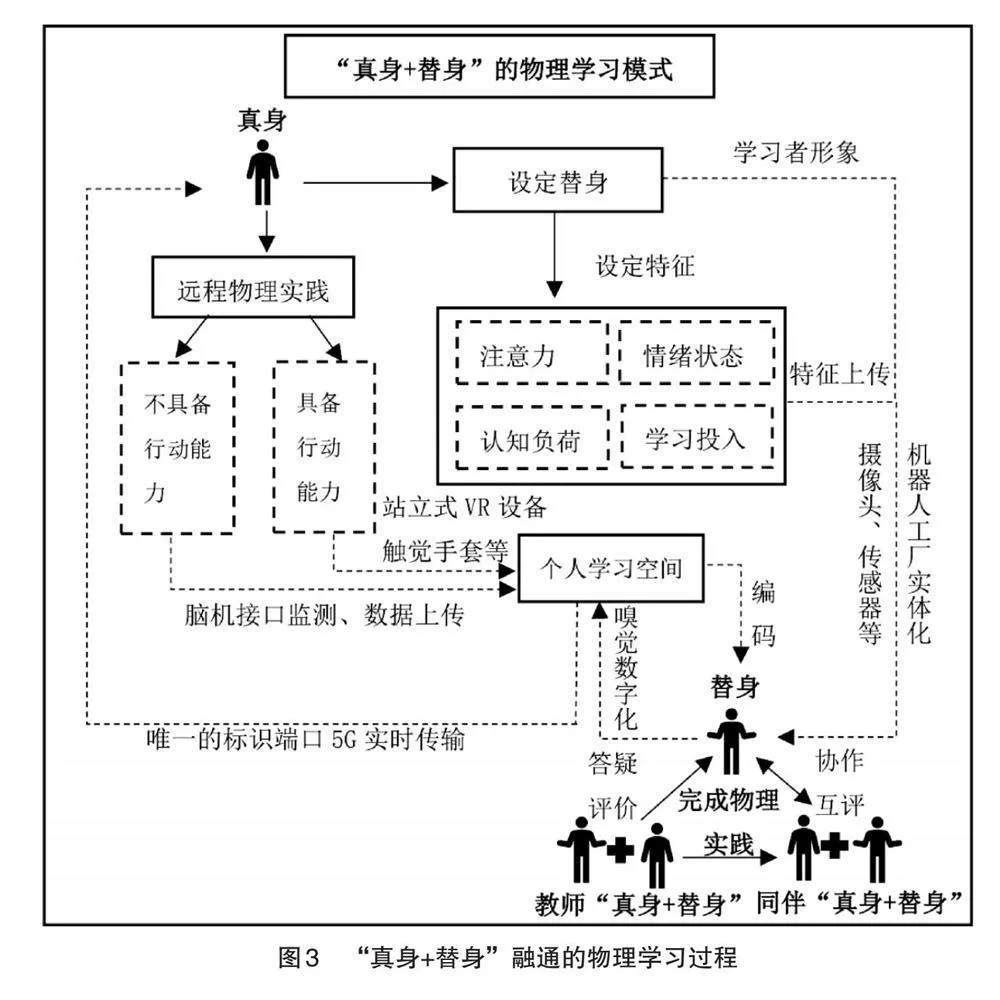
“真身”与“替身”融通的物理学习适用于同一时间真身无法在空间上满足学习需要的情境。例如美国马里兰州的十岁小女孩佩顿·沃尔顿(Walton, P.)因身患肝癌在医院接受治疗,却借助机器人替身“重返”校园(孙若男, 2015),实现了与同学和老师的实时互动;13岁的美国男童阿奇姆·努斯(Nuss, A.)在病床上“遥控机器人”作为“替身”直接和课堂上的老师与同学进行交流(沈志真, 2006)。这些案例都可一窥“真身+替身”进行物理学习的雏形。这种学习过程包括以下三个部分(如图3所示)。
首先,设定替身。当真身不便去往某一物理空间时,就可以安排替身前往。此时,真身先将其形象上传至学习空间,确保替身的面部特征、身体比例等与真身一致。更重要的是,真身还要选择替身需呈现的学习特征,例如注意力、情绪状态、认知负荷、学习投入等。在学习者上传替身需呈现的学习特征后,由机器人工厂将学习者的数字化形象进行3D打印实体化为替身,并派遣至学习者设定的目的地。
其次,替身进行远程物理实践。这里分为两种情况:其一,在真身具备行动能力但“缺场”的情况下,真身通过头戴式设备、站立式VR设备远程控制替身进入课堂学习。其二,当真身不具备行动能力时,真身通过脑机接口技术在家中控制远在教室的替身回答教师的问题。由于脑机接口技术在理论上可提供更好的认知用户接口,实现人的感知、认知、思想的直接输出与外界信息的直接输入(彭影彤 等, 2023),连接了唯一标识端口的真身便可将指令传输给替身。通过收集来自大脑皮层的指令,安装了脑机接口设备的特殊学生个体可完成各种外部动作的操作(王兴 等, 2023)。在此过程中,脑机接口等关键技术还可为学习风格判别、情感识别、专注度监测等(Verkijika & De Wet, 2015)提供参考。学习者学习状态等数据在反馈给真身的同时也将反馈给替身,帮助真身调整学习状态。
最后,真身替身共智。真身在替身辅助下扩展和丰富其认知与记忆,并增强其在现实空间的能力(王卓 & 刘小莞, 2022);替身在进行海量数据的处理、场景的模式识别等强化学习训练后,实现智能增长。这种人机共融的增强智能模式基于真身及其替身的互动和协作,源于技术的发展和认知的交流。
通过“真身+替身”融通的学习方式,学习者可实现远程“具身”学习。真身与替身之间的信息交换和知识分享不仅将实现真身感知能力增强和智能水平提升,同时也将促进人机协同学习、协同决策和协同创新。诚然,制作替身时的成本、替身使用后的回收、真身与替身的无缝同步等,都是待解决的关键技术问题。此外,如何对替身进行身份认证和监管等伦理法律层面的问题也有待解决。
3. “真身+分身+替身”融通的虚实学习模式
“真身+分身+替身”融通学习,是指作为自然人的“真身”不仅能远程控制作为高仿生机器人的“替身”,还可以和作为数字人的“分身”融为一体,进行智能交互与协作的一种学习模式。
(1)“真身+分身+替身”融通的机理
自然人、虚拟人、机器人之间可进行数据交流和选择性同步(肖珺 & 黄枫怡, 2023),这三者的融通可以通过唯一的标识端口实现。在此状态下,真身与分身相融,可以在虚拟世界中拓展自身的认知和技能;真身可以远程控制替身实现身体延伸,从而在物理世界中完成各种任务;分身可与替身连接并集成,二者通过唯一标识端口同步接收和执行真身的命令,进行语言交互、触觉交互等。例如,在菲律宾的真身教师可借助韩国科学技术院开发的远程教育机器人Engkey模仿教师的表情、口型和动作,成为菲律宾教师的替身,与韩国的学生进行英语互动(Yun et al., 2013)。此外,真身在操纵替身时,也可选择分身加入唯一标识端口,使分身获取替身的数据。真身因而不仅能获得替身传送的第一人称视角,也能以第三人称观看分身。
(2)“真身+分身+替身”融通的虚实学习过程
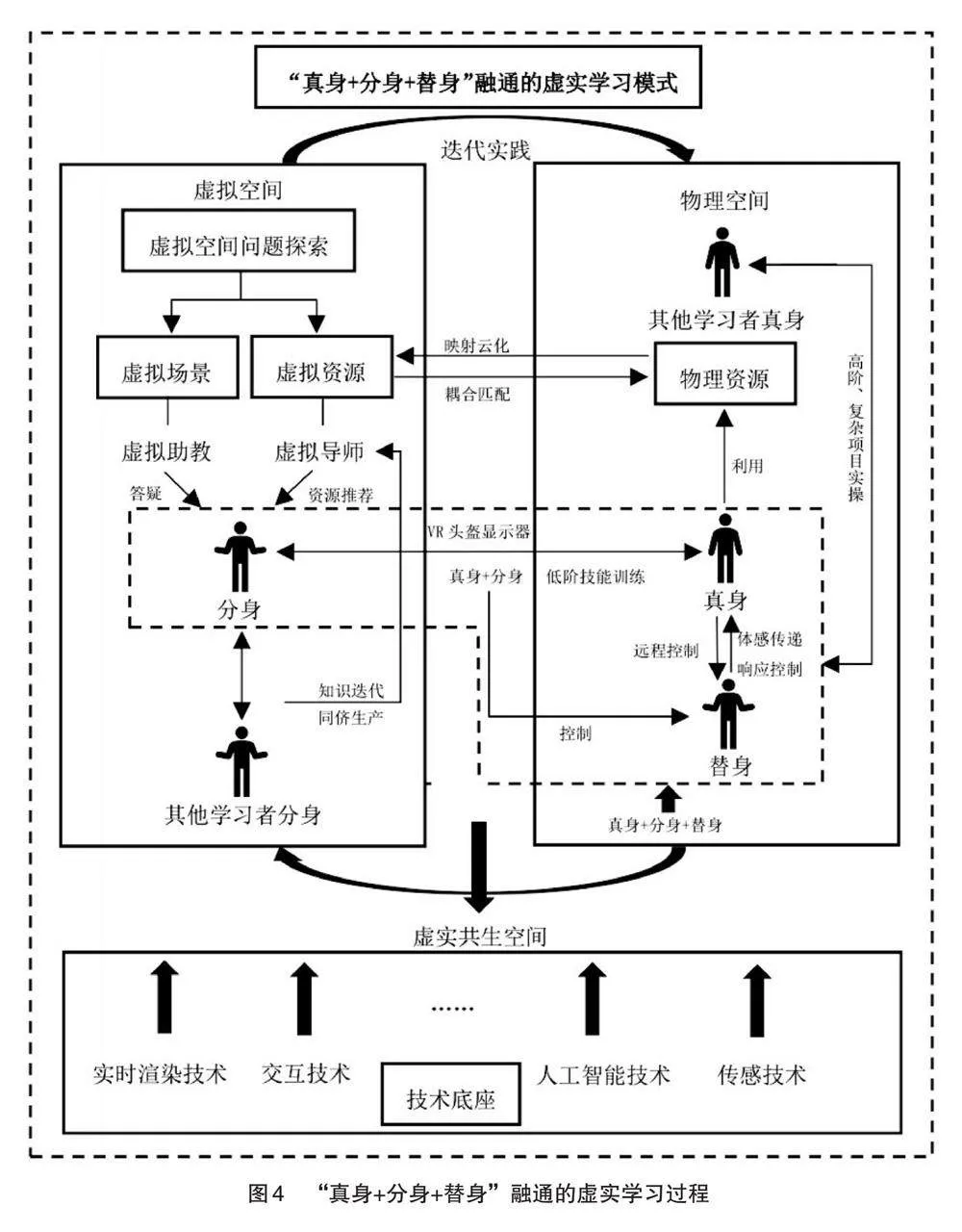
“真身”“分身”“替身”融通的虚实学习适用于复杂程度较高的技能型训练,例如焊接、机械加工等。这种学习过程包括以下三个部分(如图4所示)。
首先,进入虚拟空间开展问题探索。例如,为训练焊接技能,真身在具备一定焊接理论知识的基础上,与分身融通进入虚拟空间中的立体化焊接问题情境,身临其境地感受近乎真实的焊接工作场景,包括焊接过程中的温度、焊缝形状、焊熔池参数等。虚拟空间中的虚拟导师、助教或其他虚拟角色为分身提供答疑、推送焊接相关的工具和资源等必要的学习支持。
其次,进入虚实共生空间进行技能训练。进行知识的探索学习后,真身进入虚实共生空间针对目标技能按照不同的训练等级进行技能训练。若物理空间中不具备真身所需资源时,真身则可设定虚拟空间灵活匹配物理空间所需资源。例如,真身已有手持焊接设备,但缺少焊接材料。此时,手持焊接设备可被1∶1映射到虚拟空间,真身与分身融为一体进入虚拟空间选择需要焊接的材料。当真身与分身融通完成低阶的技能训练后,便可与替身融通在物理空间尝试完成高阶、复杂、大型的焊接工程。若真身与焊接工厂、其他焊接工相隔较远距离时,真身便可借替身与其他焊接工真身协作完成工程。此时,远在异地的真身与分身融通在虚拟空间进行焊接操作,与此同时替身可通过其在关键位置部署的传感器毫无延时地响应,完全还原虚拟空间中真身的一举一动。通过孪生技术、实时云渲染技术,替身便可将其在物理空间进行的焊接工程等相关资源、信息虚拟化至虚拟空间,而真身与分身则在虚拟空间获取信息后再通过控制替身反向对物理空间的工程进行焊接。
最后,迭代实践。真身可根据自身需求通过不断迭代上述过程进行实践以提高焊接技能。在迭代过程中突破时空和原材料的限制,多次实验和调整。
通过虚实共生空间同步实践,真身不仅通过分身拓展其在虚拟空间的能力,通过替身扩展其在物理空间的能力,还可以实现分身与替身的信息流通与协作。当然,此学习方式的实现也需要一定的技术支持:“超级个体”内部之间的行为交互需要高性能的图形渲染能力、实时的空间定位和跟踪能力;虚实共生空间需要稳定且无延迟,确保真身在虚拟空间和物理空间之间的无缝切换以及与替身和分身的顺畅互动。
五、结论与展望
受限于技术及基础设施的不足,对于未来学习的研究大多聚焦于技术架构和空间构建的设想上,学习模式的设计往往滞后于空间或技术的设计,更难有清晰的学习活动和路径。本研究展望了人与技术史无前例地交织互嵌形成的“超级个体”所进行的一种全新学习模式——融通学习。虽然这种学习的虚拟属性尤为凸显,但学习者在学习过程中身体的时间和空间的物质性体验(吴刚 & 杨芳, 2022)这一教育的特殊性在融通学习中依然贯穿。值得注意的是,融通学习并非诱导学习者“脱实向虚”。毕竟,真身在物理世界中的学习实践仍是一种重要的学习方式。如若在现实世界中已经具备了学习的条件,最好的学习选择仍是真身的物理实践。虽然融通学习可能为学习者提供无缝切换虚实共生空间学习的新路径,但选择何种学习方式依然要以学习内容为导向,分身和替身的一切活动都不能脱离真身而独立进行,否则人的主体性将消解于多身份与物质世界的虚无互动中。
尽管融通学习模式还有可能存在一定的伦理风险和隐私风险等,但是,站在未来视角审视当下的教与学,以及通过对未来的虚拟想象来对现实教育进行改造和创新思考(谭维智, 2022)不仅十分必要,还可能为未来教育的创造性发展提供启示和灵感。伴随学习空间底层技术的日趋成熟,在未来研究中,可在虚拟现实技术和元宇宙的支持下对融通学习进行初步验证,并探究基于此构建的学习模式的实践效果,促使这一基于“超级个体”的学习形态逐渐完善。
参考文献
爱德华·威尔逊. (2016). 知识大融通:21世纪的科学和人文(梁锦鋆 译). 中信出版集团.
艾曼努埃尔·埃洛阿. (2016). 感性的抵抗:梅洛-庞蒂对透明性的批判(曲晓蕊 译). 福建教育出版社.
鲍威,陈得春,& 王婧. (2021). 后疫情时代线上线下学习范式和教学成效的研究——基于线上线下高校学生调查数据的对比分析. 中国电化教育(6),7-14.
曹青云,& 部凡. (2023). 虚拟仿真技术赋能思政课教学的实践进路. 贵州师范大学学报(社会科学版)(5),43-53.
戴维·斯特利. (2021). 重新构想大学:高等教育创新的十种设计(徐宗玲,林丹明,& 高见 译). 生活·读书·新知三联书店.
范文翔,& 赵瑞斌. (2020). 具身认知的知识观、学习观与教学观. 电化教育研究(7),21-27,34.
顾小清,宛平,& 王龚. (2023). 教育元宇宙:让每一个学习者成为主角. 华东师范大学学报(教育科学版)(11),13-26.
郭庆藩. (2016). 庄子集释(上卷):卷5(王孝鱼 点校). 中华书局.
何光顺. (2022). 身体技术演练中的感知觉回归——从庄子视角看技术的肉身性与人工智能的未来. 福建论坛(人文社会科学版)(2),99-111.
何伦凤,& 朱谦. (2023). 智能的交互:脑机接口中的身体图式转向. 江汉论坛(11),72-82.
黄荣怀,刘德建,阿罕默德·提利利,张国良,陈莺,& 王欢欢. (2023). 人机协同教学:基于虚拟化身、数字孪生和教育机器人场景的路径设计. 开放教育研究(6),4-14.
李海峰,& 王炜. (2016). 基于具身认知理论的在线学习环境设计研究——以小学英语在线虚拟学习社区的设计与开发为例. 中国远程教育(2),71-78.
李海峰,& 王炜. (2023). 人机协同深度探究性教学模式——以基于ChatGPT和QQ开发的人机协同探究性学习系统为例. 开放教育研究(6),69-81.
李静,& 刘蕾. (2021). 技术赋能的高等教育规模化教育与个性化培养:逻辑必然与实践机理. 中国电化教育(8),55-62.
李伟,& 卫子昊. (2023). 从“缺场共在”到“虚实共生”——元宇宙时代身体—技术的关系变迁. 自然辩证法通讯(8),48-55.
李政涛,& 罗艺. (2019). 智能时代的生命进化及其教育. 教育研究(11),39-58.
刘邦奇,聂小林,王士进,袁婷婷,朱洪军,赵子琪,& 朱广袤. (2024). 生成式人工智能与未来教育形态重塑:技术框架、能力特征及应用趋势. 电化教育研究(1),13-20.
卢国庆,刘清堂,张臣文,& 贺相春. (2023). 基于多主体交互的混合学习环境感知与投入分析. 电化教育研究(11),82-89.
路强. (2022). 数字虚拟世界的伦理基底——以“VR性侵”为中心. 探索与争鸣(7),124-130,179.
吕健,& 孙霄兵. (2022). 教育元宇宙功能探析——基于补偿机制与内容生产. 学术探索(10),151-156.
彭影彤,高爽,尤可可,马蝶,& 沈阳. (2023). 元宇宙人机融合形态与交互模型分析. 西安交通大学学报(社会科学版)(2),176-184.
覃祖军,冯建刚,& 郑兰梅. (2022). 基于元宇宙概念的AI数字人云课堂. 中国现代教育装备(8),7-11.
申灵灵,卢锋,& 张金帅. (2023). 从化身到具身:元宇宙教育应用的价值效能与风险考量. 电化教育研究(4),46-52.
沈霞娟,张宝辉,& 张浩. (2022). 深度混合学习设计模型的构建与实证研究. 现代教育技术(8),50-58.
沈志真. (2006-6-1). “上课机器人”代生病学生向老师提问. 沈阳今报. https://news.sina.com.cn/o/2006-06-01/13559091071s.shtml
孙若男. (2015-12-14). 美十岁肝癌女孩“重返”校园 借助机器人上课见同学. 中国日报. http://world.chinadaily.com.cn/2015-12/14/content_22709831.htm
孙玮. (2018). 赛博人:后人类时代的媒介融合. 新闻记者(6),4-11.
谭维智. (2022). 将科幻作为一种教育研究范式. 教育研究(5),17-33.
唐玉溪,& 何伟光. (2020). 技术文化哲学视域下美国高校自适应学习变革. 中国远程教育(7),32-40.
王兴,杨岱齐,& 陈思宇. (2023). 基于教育元宇宙下学习生态变革与路径探析. 继续教育研究(8),40-45.
王卓,& 刘小莞. (2022). 元宇宙:时空再造与虚实相融的社会新形态. 社会科学研究(5),14-24.
吴刚,& 杨芳. (2022). 元宇宙与教育活动的“物质转向”:老故事与新实在. 南京社会科学(4),135-142,160.
吴莎莎,白晓晶,& 蒋明蓉. (2018). 基于区块链技术的在线学习数字徽章认证研究. 中国远程教育(11),19-24,79.
肖珺,& 黄枫怡. (2023). 悬而未决的数字文明:对虚实融合传播的社会认知及反思. 新闻与传播评论(4),91-105.
闫君子,& 张家军. (2023). 学习元宇宙的图景诠释与建构路径. 远程教育杂志(2),36-47.
杨霞. (2024). 数字时代学习场域“身体—技术”的可供性生产与响应式协商——基于技术可供性视角. 电化教育研究(6),34-40.
杨现民,李怡斐,王东丽, & 邢蓓蓓. (2020). 智能时代学习空间的融合样态与融合路径. 中国远程教育(1),46-53,72,77.
姚伟,周鹏,于会伶,& 王铮. (2022). 从数字孪生到知识孪生:赋能虚拟社区成员感知收益促进知识转化. 情报理论与实践(9),67-74,82.
殷丙山,& 高茜. (2017). 技术、教育与社会:碰撞中的融合发展——2017高等教育版《新媒体联盟地平线报告》解读. 开放教育研究(2),22-34.
岳伟,& 苏灵敏. (2023). 学会学习:智能时代学习方式变革的本质透视. 广西师范大学学报(哲学社会科学版)(4),58-67.
詹泽慧,季瑜,牛世婧,吕思源,& 钟煊妍. (2023). ChatGPT嵌入教育生态的内在机理、表征形态及风险化解.现代远距离教育(4),3-13.
张刚要,& 陈煜. (2023). 从机械身体论到“在世存在”身体论:教育技术实践中的身体景观. 电化教育研究(9),12-18.
张敬威,& 苏慧丽. (2021). 远程在场的知识延展与存在收缩——对在线教育的存在论阐释. 开放教育研究(1),65-70.
钟志贤,& 孙菊如. (2007). 学习模式的类型与价值判断. 现代远距离教育(4),3-5.
朱珂,丁庭印,& 付斯理. (2022). 元宇宙赋能大规模超域协同学习:系统框架与实施路径. 远程教育杂志(2),24-34.
朱珂,张莹,& 李瑞丽. (2020). 全息课堂:基于数字孪生的可视化三维学习空间新探. 远程教育杂志(4),38-47.
祝智庭,戴岭,& 胡姣. (2023). 高意识生成式学习:AIGC技术赋能的学习范式创新. 电化教育研究(6),5-14.
Kurzeil, R. (2011). 奇点临近(董振华,& 李庆诚 译). 机械工业出版社.
Botvinick, M., & Cohen, J. (1998). Rubber hands ‘feel’ touch that eyes see. Nature, 391, 756.
Demaidi, M. N., Qamhieh M., & Afeefi, A. (2019). Applying blended learning in programming courses. IEEE Access(7), 156824-156833.
Ihde, D. (2002). Bodies in technology. University of Minnesota Press.
Kolb, D. A. (1984). Experiential learning: Experience as the source of learning and development(2nd Ed.).Prentice-Hall.
Lan, Y.-J., Fang, S.-Y., Legault, J., & Li, P. (2015). Second language acquisition of Mandarin Chinese vocabulary: Context of learning effects. Educational Technology Research and Development, 63(5), 671-690.
Verkijika, S. F. , & De Wet, L. (2015). Using a brain-computer interface(BCl) in reducing math anxiety: Evidence from South Africa. Computers and Education, 81(1),113-122.
Yun, S., Kim, M. , & Choi, M. (2013). Easy interface and control of tele-education robots. International Journal of Social Robotics(3),335-343.
Towards Consilience Learning: An Exploration of the Future Learning Model based on “Mega-Individuals”
Shi Yuxiang and Lu Feng
Abstract: The rapid advancement of technology has brought human society to an unprecedented pinnacle in the demand for connectedness between the virtual and the real. This demand for connectedness will catalyze the profound integration of humans and machines, giving rise to a new type of entity—the “Mega-Individuals” (MIs)—whose human wisdom and artificial intelligence converge. The emergence of MIs heralds the possibility of a novel learning model—Consilience Learning. Consilience Learning refers to the learning modality, where “MIs” endowed with both biological and technological attributes, engage in an integrated online and offline, virtual and reality-interwoven learning space, supported by synergistic learning resources and facilitated through a process of human-machine integration, thereby achieve a “consilient” experience. It is characterized by the “consilience”of learning spaces, resources, interactions, and experiences. In the future, bolstered by technologies such as extended reality and metaverses, “MIs” may opt to learn through various “forms”, thus giving rise to multiple models of learning, including the virtual learning model with “real self + avatar”, the physical learning model with “real self + substitute”, and the hybrid learning model combining “real self + avatar + substitute”. Although the envisioned future of Consilience Learning is currently grounded in the virtual imagination of science fiction educational research paradigm, this imaginative projection is not only beneficial for scrutinizing current teaching and transforming real education, but also likely to provide inspiration and spark innovation for the creative development of future education.
Keywords: Mega-Individuals; consilience learning; learning model
Authors: Shi Yuxiang, graduate student of the School of Educational Science and Technology, Nanjing University of Posts and Telecommunications (Nanjing 210023); Lu Feng, dean and professor of the School of Educational Science and Technology, Nanjing University of Posts and Telecommunications (Nanjing 210023)
责任编辑 刘 莉
