多RIS辅助车载通信信号优化及部署规划
2024-10-14陈发堂王嘉程刘祚

摘 要:针对匀变速运动的汽车产生的多普勒扩展和时延扩展以及接收信噪比的问题,提出了一种多智能超表面(RIS)辅助匀变速移动物体通信的方案。与传统信道估计不同的是,使用了信道增益的方法和优化RIS相位以及多目标优化来让移动物体能达到最大接收瞬时信噪比的同时,获得小的多普勒扩展和时延扩展。通过优化后的RIS相位来研究RIS的位置对接收信号的影响,分别研究了RIS之间的距离以及RIS之间距离一定时,RIS摆放在什么位置使得接收信号的信噪比以及时延扩展保持较低的范围,对于这个问题提出了相对运动的理论,且各自提出一种算法解决这两个问题。仿真表明,多RIS辅助的通信系统对车载通信接收信号的功率提升了约10 dB。RIS的部署位置应该让第一个RIS靠近基站并且RIS之间的距离在现实允许的情况下尽可能靠近。由此多RIS的通信方案可以广泛应用于车载通信中。
关键词:匀变速运动; 多普勒扩展; 时延扩展; 接收信噪比; 智能超表面
中图分类号:TN929.5 文献标志码:A
文章编号:1001-3695(2024)10-035-3129-06
doi:10.19734/j.issn.1001-3695.2024.02.0041
Optimization and deployment planning of multi RIS assisted in vehicle communication signals
Chen Fatang, Wang Jiacheng, Liu Zuo
(School of Communications & Information Engineering, Chongqing University of Posts & Telecommunications, Chongqing 400065, China)
Abstract:This paper proposed a scheme to assist communication for vehicles undergoing uniform motion with variable speed, addressing issues such as Doppler spread, time delay spread, and received signal-to-noise ratio(SNR) through the utilization of a multi-intelligent RIS. Unlike traditional channel estimation, this scheme utilized channel gains and optimized RIS phase to minimize Doppler and delay spreads while maximizing instantaneous signal-to-noise ratio(SNR) for the moving object. The scheme studied the impact of RIS placement on the received signal by optimizing the RIS phase, exploring the distance between RIS units and the optimal positioning of RIS units when the distance between them was fixed to maintain a low range of reception SNR and delay spreading. It introduced relative motion theory for this problem and proposed respective algorithms to address both issues. Simulations show around a 10 dB power gain for vehicular communication receivers with multiple RIS assistance. Optimal RIS deployment suggests placing the first RIS near the base station and minimizing inter-RIS distances as much as practically feasible, showcasing the broad applicability of this multi-RIS communication approach in vehicular scenarios.
Key words:uniform speed; Doppler spread; time delay spread; received signal-to-noise ratio; reconfigurable intelligence surface(RIS)
0 引言
随着5G的大规模商用,全球开启了对下一代通信技术的探索。车载通信是6G技术研究的重点,与其他无线网络相比,车载通信系统具有收发机高移动性的特点,且在通过列车或汽车车厢时,信号穿透损耗较大[1]。因此,这些独特的特性导致了许多设计上的困难,如信道建模、多普勒效应补偿和时变信道估计[2]。在此背景下,第五代蜂窝系统已经融入了大规模多输入多输出(massive multiple-input multiple-output,mMIMO)和毫米波(mmWave)等补偿技术[3]。对于即将到来的第六代蜂窝系统,mMIMO和mmWave由于高硬件成本、高能耗和高计算复杂度[4,5],已经被证明是低效和不可持续的。针对这些挑战,最近,智能超表面(reconfigurable intelligent surface,RIS)作为一种有前途的技术来应对这些挑战。
智能超表面被认为是未来通信发展的关键技术之一,因为它具有易部署、硬件成本低和功耗低等特点,可以提高信道容量,扩大覆盖范围,被公认为是 6G 潜在的通信技术之一[6]。RIS能够智能地调控空间中的电磁波,从而灵活地调整无线传输信道并改变无线传播环境。通过在无线网络中密集部署可重构智能反射表面,可以灵活协调反射发射机和接收器之间的信号传播,为解决无线信道衰落、损耗和干扰问题提供了一种新的手段[7,8]。车载通信是目前最重要的通信方式之一,车载通信最大的特点就是要求高的信噪比且低的多普勒扩展和时延扩展,但在传统的通信系统中,由于环境因素,汽车接收到的信号经过一系列的衰落变得不能满足车载通信所要求的信噪比以及多普勒扩展和时延扩展,RIS辅助的车载通信系统很好地解决了这个问题。RIS技术的出现不同于传统通信系统的设计方案,它从复杂多变的链路传输环境入手,通过相位控制来自适应调节传输链路的环境,这种先进技术以低成本、低功耗的方式提升了车载通信系统的性能。
目前已有一些文献利用RIS来对抗移动物体的小尺度衰落。高速移动的车辆具有严重的多普勒效应,并导致发射机和接收机之间叠加快衰落信道。文献[9]讨论了RIS背景下的多普勒效应及其抑制。研究表明,通过实施实时可调的RIS,可以有效地缓解多普勒效应引起的信号强度的剧烈变化。然而,如果存在直接的视线矢量(LOS)链路,则无法补偿多普勒频移。文献[10]讨论了在RIS的辅助下对移动车辆的多普勒扩展并分析了时延扩展。研究表明,通过RIS可以在保持车辆接收瞬时信噪比最大的同时,消除多普勒扩展并让时延扩展保持在较低的水平。但是以上是根据单RIS进行的,并且车辆是匀速运动的,不符合现实场景。文献[11]针对具有单个RIS的无线通信引入了一个通用的时变模型,并推导了复杂基带通信系统中的接收信号表达式。此外,利用所提模型,证明了如果存在不可控的直接信道链路,就不可能同时最大化信噪比(SNR)和补偿由RIS引入的多普勒频移。文献[12]研究了在高速运动的汽车上装载RIS来辅助车辆与路边静止物体的通信,此研究仿真表明,RIS可以将由于汽车运动引起的快衰落变为可控制的慢衰落,由此来提升汽车接收到的信噪比,但是它是基于传统信道估计的算法,复杂度较高,而且由于车顶空间有限,RIS装载到车上并不能增加很大的信噪比。近年来,多RIS系统在性能提升方面得到了研究[13~16],但是大多数的多RIS系统的服务对象都是静止物体。对于RIS的位置问题,文献[17]研究了多RIS的环境下RIS摆放在什么位置让接收端接收到的信噪比最大,在一个具有多个RIS的区域中提出了一种算法,从一组候选点中选择最优的位置来部署RIS,以最大化可实现的数据速率,但是这些方案没有在车辆高速运行的环境下进行。
综上所述,当前研究主要集中在静止物体或者简单匀速运动的单RIS辅助场景下。然而,在现实中,车辆往往不是匀速的,而单个RIS很难最大程度地提升车辆接收信号性能。此外,少有文献探讨多RIS辅助下变速运动物体的情况。现有文献大多针对RIS的最佳部署位置在相对静止物体的场景下进行研究,而对于运动物体的场景,RIS部署位置与接收信噪比、多普勒扩展以及时延扩展的关系研究较少。传统研究往往采用传统的信道估计技术,其复杂度高且难以实现。为解决这一问题,本文充分利用位置信息(如车辆位置)而非传统信道估计技术,实时设计相移集。本文系统模型仅考虑传输距离和时间,通过设计合理的相移集合,RIS能够重新配置反射相位,实现所有通道对齐,从而最大化接收功率,而无须传统信道估计。这一方案易于实现,并且比传统的RIS辅助系统更节能。本文的主要研究目的是探讨多RIS辅助下车载通信的小尺度衰落抑制、接收信号优化以及RIS部署位置问题。
本文的主要研究工作与创新点如下:
a)通过优化多个可控相移的RIS,以辅助匀变速的车辆通信,本文设定了三个优化目标。首先,本文的主要目标是优化汽车接收到的瞬时信噪比,以确保在通信过程中信号质量的稳定性和可靠性。第二个目标是减小由于车辆高速运动而引起的多普勒扩展,从而避免频谱扩展对信号传输造成的负面影响。第三个目标是尽可能将时延扩展保持在较低的范围内,以确保通信系统的实时性和可靠性,并通过优化后的可控相移来比较匀速与匀变速的差异,旨在说明不可把变速运动简化为匀速运动。
b)提出了一种相对运动的理论方法以及设计了两个算法,旨在通过优化RIS的可控相移来实现最佳性能。这些算法考虑了车辆和RIS之间的相对运动,并在此基础上提出了优化策略,以最大程度地提升通信系统的性能。通过这些算法,本文能够评估不同的RIS部署位置对通信性能的影响,并确定在实际应用中最优的RIS布置方案。同时还研究了RIS不同反射单元数量对通信性能的影响。
c)仿真结果显示,通过优化多个RIS的最佳可控相移,可以显著优化汽车接收到的功率。而且这种优化策略能够有效消除多普勒扩展,并且将时延扩展保持在较低的范围内,从而提升了通信系统的稳定性和可靠性。进一步分析表明,在现实资源允许的情况下,RIS之间的距离越小,通信性能越好。此外汽车经过的第一个RIS起着关键作用,这个RIS距离基站越近且具有更多的反射单元,就能获得更高的信噪比和更小的时延扩展。仿真表明了RIS部署位置的重要性,特别是在车辆高速移动的情况下,以确保最佳的通信性能和系统效率。本文在现实情境中具有较实用的意义。
1 RIS系统模型和界定问题
1.1 RIS通信系统的三维坐标
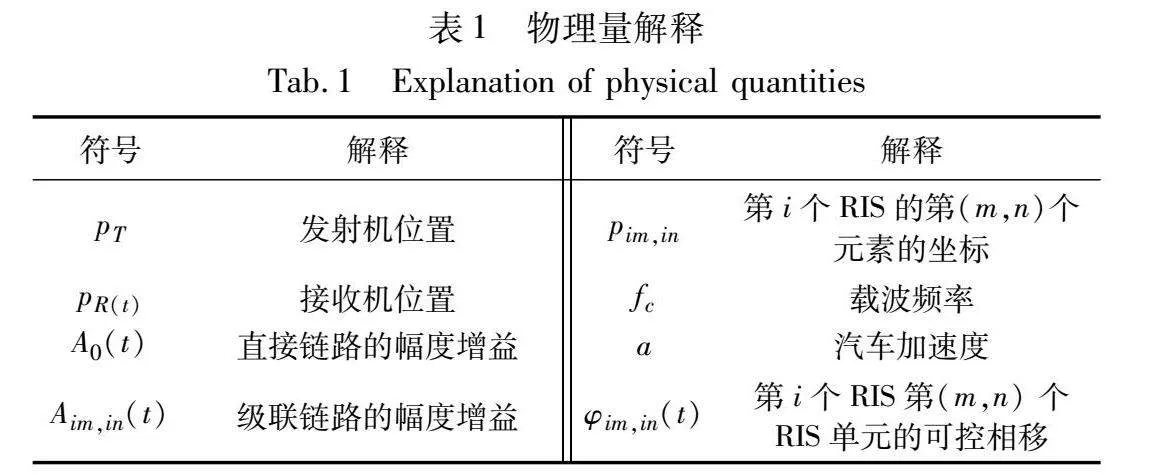
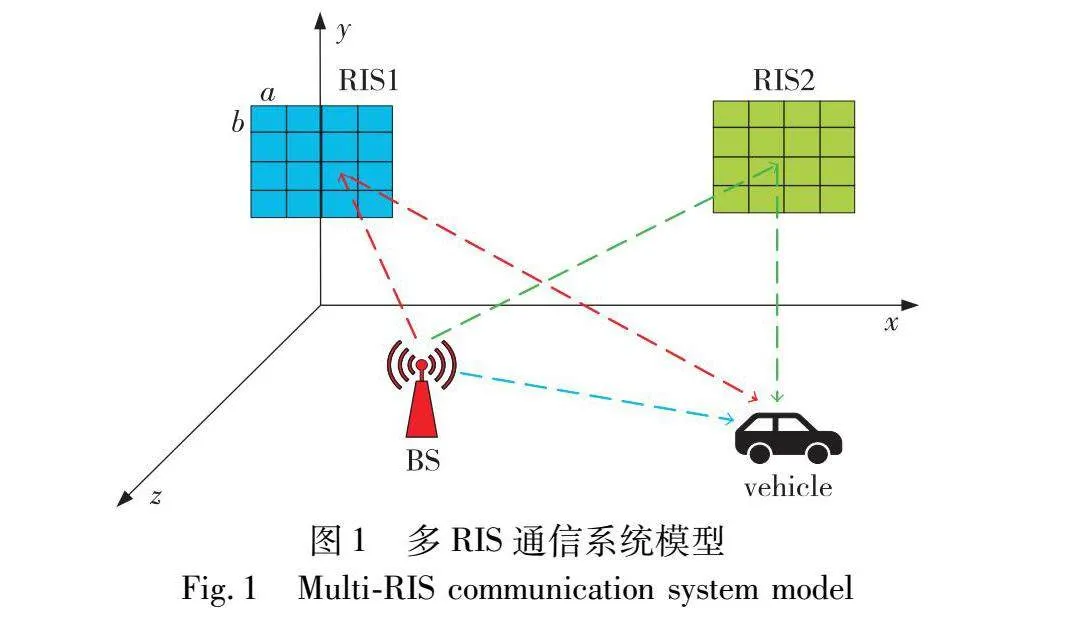
本文考虑的是多RIS辅助的通信情景下对正在匀变速运动的汽车进行研究。在现实生活中,汽车的瞬时速度可以依靠GPS来提取,并将此信息传给基站和RIS,所以汽车的信息是先验已知的。本文所有用到的主要物理量如表1所示。其中BS和移动的车辆都配备了一个各向同性的单天线。RIS是由M×N个阵元组成的均匀面阵,其中RIS反射单元的长和宽分别为a和b,且各个RIS都是非合作的,任意两个非合作RIS之间不存在信息交换,因此省略了多跳信号反射[11],而且考虑远场场景,任意两个RIS的间距足够大,干扰可以忽略不计。整个通信系统建立在一个三维坐标系下,如图1所示。
其中假设RIS1中心在三维坐标系的坐标为(0,h,0),并且假设RIS反射单元的排列顺序是依次从左到右,从下到上的,标记为第(m,n)反射单元。第(m,n)个反射单元的三维坐标为
xm,n=a[m-0.5(N+1)]
ym,n=b[m-0.5(M+1)]+hzm,n=0(1)
为了方便起见,本文假设a=b,M=N。所以第(m,n)个反射单元的三维坐标为(xm,n,ym,n,0)。本文的汽车假设在做匀变速直线运动,加速度为a。
1.2 直接链路和RIS反射链路的增益
假设直接路径(即从BS到车辆)和RIS路径(即从BS到RIS和从RIS到车辆)上的信道存在自由路径的衰落,并且忽略了硬件损伤。因此,如果发射机位于pT,当瞬时时间为t时,得到了直接路径损耗A0(t)。A0(t)的具体表达式可表示为
A0(t)=λcGRT(t)GTR(t)4π‖pR(t)-pT‖(2)
其中:GRT(t)是观察点为接收天线时的发射天线增益;GTR(t)是观察点为发射天线时的接收天线增益;λc为信号的波长;‖pR(t)-pT‖为发射端和接收端在时刻t的欧氏距离。
同理得到RIS路径的幅度自由路径损耗可由式(3)表示。
Aim,in(t)=λ2cGim,inTGTim,inGRim,in(t)Gim,inR(t)16π2‖pim,in-pT‖‖pR(t)-pim,in‖(3)
其中:GTim,in是观测点为发射天线时RIS单元的元件增益;GRim,in(t)是观测点为接收天线时RIS单元的元件增益。由于发射天线和接收天线都是各向同性的,所以Gim,inT=Gim,inR(t)=1。
本文假设车辆处于几何远场,RIS具有平面天线增益模式,那么可以得到以下增益GTim,in=4πλ2cabcos(θT),GRim,in(t)=4πλ2abcos(θR(t)),其中θT=arccos(zim,in-zT‖pim,in-pT‖),θR(t)=arccos(zim,in-zR(t)‖pim,in-pR(t)‖)。
由于本文的zm,n假设为0,则自由路径损耗可写为
Aim,in(t)=ab4π·zTzR(t)(‖pim,in-pT‖‖pR(t)-pim,in‖)3/2(4)
其中:zT和zR分别为基站发射端和汽车接收端的z轴坐标。因此,相应汽车所接收到的复杂基带接收信号如式(5)所示。
y(t)=A0(t)e-j2πfcτ0(t)x(t-τ0(t))+∑im,inAim,in(t)e-j2πfcτim,in(t)-jim,in(t)x(t-τim,in(t)-im,in(t)2πfc)+n(t)(5)
其中:n(t)为高斯白噪声(WGN)过程,功率谱密度(PSD)为N0。
1.3 接收端的SNR,多普勒扩展,时延扩展
假设发射机发送功率为PT的恒定信号x(t),利用式(5)可以计算出瞬时接收信号功率Preceived(t)为
Preceived(t)=PT|A0(t)e-j2πfcτ0(t)+
∑im,inAim,in(t)e-j2πfcτim,in(t)-jim,in(t)|2(6)
则接收信号的瞬时信噪比SNR(t)为
SNR(t)=Preceived(t)N0B(7)
其中:B为带宽。
在所有基本传播路径上瞬时频率的最大差异是多普勒扩展。在本文中,多普勒扩展是两个路径上最大的频率差。首先,在时刻t,直达路径和RIS之间的多普勒扩展为
Ds,LosRIS(t)=fc maxim,inddt(τim,in(t)+im,in(t)2πfc)-ddtτ0(t)(8)
其中:τ0(t)为指从发射机到接收机的直接路径上的时间延迟,如式(9)所示。
τ0(t)=‖pR(t)-pT‖c0(9)
其中:c0为光速。
类似地,RIS本身在时刻的多普勒扩展由式(10)所示。
Ds,RIS(t)=fc maxim,in,im′,in′ddt(τim,in(t)+im,in(t)2πfc)-ddt(τim′,in′(t)+im′,in′(t)2πfc)(10)
其中:τim,in(t)为第i个RIS的第(m,n)个RIS反射单元的级联链路时延,可以计算为
τim,in(t)=dim,inBS+dRim,in(t)c0(11)
因此,得到了在时刻t所有路径上的多普勒扩展,如式(12)所示。
D(t)=max{Ds,RIS(t),Ds,LosRIS(t)}(12)
在所有传播路径上,传播时间的最大差异是时延扩展。与多普勒扩展一样,本文也将时延扩展定义为两条路径上的最大时间差。于是在任意时刻t,RIS与直接路径之间的时延扩展可由式(13)表示。
Td,LosRIS(t)=maxim,inτim,in(t)+im,in(t)2πfc-τ0(t)(13)
并且时刻t在整个RIS上的时延扩展如式(14)所示。
Td,RIS(t)=maxim,inτim,in(t)+im,in(t)2πfc-minim′,iin′τim′,in′(t)+im′,in′(t)2πfc(14)
那么就有时延扩展在t时刻扩散到所有路径上,如式(15)所示。
Td(t)=max{Td,LosRIS(t),Td,RIS(t)}(15)
注意到τ0≤τim,in,因此,在t时刻,K个RIS的时延扩展为
T(t)=maxi{Td,LosRIS(t)} i=1,2,…,K(16)
1.4 相移优化
本文一个目标是最大化接收端的瞬时信噪比SNR(t),最小化多普勒扩展DS(t),保持时延扩展Td(t)到一个较低的范围。如果一个点实现了一个目标向量,其中任何元素可以在不恶化至少一个其他目标的情况下得到改善。这样的点称为Pareto最优解,所有这样向量的集合就是Pareto最优解集。但由文献[10]可知,在RIS通信系统中,这样的解集是很难找到的。但是所用到的信噪比,多普勒扩展和时延扩展是在没有任何预测的情况下进行的,所以可以假设本文的第一目标是最大化接收端的瞬时信噪比SNR(t),第二、三目标分别是最小化多普勒扩展DS(t),保持时延扩展Td(t)到一个较低的范围,所以首先找到最大化接收端的瞬时信噪比SNR(t)的解,其次再找出最小化多普勒扩展DS(t)和保持时延扩展Td(t)到一个较低范围的解。
假设信号的能量被表面全反射,考虑到所有的集合都是连续的,RIS的最佳相移应该设计为对准直接链路和级联链路的相位[18],通过对齐式(5)中两条路径的相位。由于在时刻t处,第(m,n)个RIS元素的可控相移为im,in(t)>0,由式(9)(11)可知2πfc(τ0(t)-τim,in(t))<0,所以有
im,in(t)=2πfc(τ0(t)-τim,in(t))+2πkim,in(t)(17)
得到在t时刻SNR(t)最大的解集S(t)。其中kim,in(t)是取整数值的分段常数函数,表示附加的全载波信号周期延迟。值得注意的是,kim,in(t)不影响SNR(t)。因此,首先要得到解的是相位向量集S(t)=im,in(t)。此时接收端的功率变为
Preceived(t)=PT|A0(t)+∑im,inAim,in(t)|2(18)
接下来,是从S(t)中找到解的相位向量集D(t)。集合D(t)的目标是最小化多普勒扩展,同时保证SNR(t)最大化。于是,可以对式(17)求导得
ddtim,in(t)=2πfcddt(τ0(t)-τim,in(t))+2πddtkim,in(t)(19)
由于kim,in(t)的定义,发现ddtkim,in(t)=0。但是,当时间t变化一个整数值时,kim,in(t)会导致2π的相移,且不影响瞬时频率。所以,ddtkim,in(t)=0,则有
ddtim,in(t)=2πfcddt(τ0(t)-τim,in(t))(20)
因此,由于式(19),Ds,0(t)被最小化为零。同时,式(20)也保证了Ds,RIS(t)减为零。因此,D(t)与S(t)是相同的集合。
本文最终想要寻找一个最优解(或解集)使得时延扩展Td(t)最小。由式(13)(17)不难发现,最大化SNR(t)和最小化Td(t)不能同时实现。因此,这个问题存在一个次优解相位解集,而不是一个全局单最优解。由于本文的第一优化目标是接收端的瞬时SNR(t),第三目标是保持时延扩展Td(t)到一个较低范围,所以将式(17)代入式(16),得到
Td(t)=maxim,inkim,in(t)fc(21)
因此,应尽量选择较小的kim,in(t)。由式(6)(11)可知,τim,in(t)≥τ0(t),kim,in(t)≥fc(τim,in(t)-τ0(t))≥0。因此,优化后可以选择kim,in(t)=「fc(τim,in(t)-τ0(t)),于是时延扩展Td(t)为
Td(t)=1fcmaxim,in「fc(τim,in(t)-τ0(t))(22)
由此所有解已求出。
1.5 位置界定问题
以上讨论了最大化接收端的瞬时信噪比SNR(t),最小化多普勒扩展DS(t),保持时延扩展Td(t)到一个较低范围的优化相位。下面在此基础上讨论RIS放到什么位置时能使得接收到的信噪比最大的同时最小化多普勒扩展DS(t),保持时延扩展Td(t)到一个较低的范围。由于在此优化的相位的基础上,多普勒扩展已经减小为0,所以以下的讨论不包括多普勒扩展,只包括接收端接收到的信噪比和时延扩展。
首先讨论RIS之间的间距对接收端接收到的信噪比和时延扩展的影响。研究的主要目标是在RIS选取合适的距离使得接收端的瞬时信噪比最大,并且时延扩展保持一个较低的范围。具体算法如下:
算法1 RIS之间的距离选择算法
输入:RIS之间的距离d。
输出:输出信噪比SNR(t),多普勒扩展D(t),时延扩展T(t)。
a)选取RIS之间的距离;
b)选取研究的时间间隔;
c)计算发射机到接收机直接路径上的时间延迟和RIS反射单元的级联链路时延;
d)计算优化后的相移;
e)将优化后的相移代入式(18)计算功率;
f)将优化后的相移代入式(22)计算时延扩展;
g)选取不同RIS之间的距离,重复以上步骤。
经过算法1的计算可以得到RIS之间合适的距离使得接收端的瞬时信噪比最大并且时延扩展保持一个较低的范围。
接着就是讨论多RIS之间距离固定的条件下,RIS摆放在哪个位置使得接收端的瞬时信噪比最大并且时延扩展保持一个较低的范围。由于RIS的反射单元太多并且接收端做的是变速运动,这使得直接移动RIS计算RIS坐标的复杂度变大。所以本文提出了一种相对运动的一种概念,通过移动基站的位置找到基站摆放的最佳位置,然后根据基站的最佳位置来移动RIS使其摆放到最优位置。此问题的目标为
max SNRmin Tdsubject to dRIS(23)
算法2 RIS摆放位置的选择算法
输入:RIS之间的距离d,基站坐标(x,y,z),每个RIS单元的数量M、N。
输出:输出信噪比SNR(t),多普勒扩展D(t),时延扩展T(t)。
a)选取研究的时间段;
b)选取RIS之间的固定距离;
c)记录基站位置的坐标;
d)根据基站的位置来计算优化后的相移;
e)将优化后的相移代入式(18)计算功率和瞬时信噪比;
f)将优化后的相移代入式(22)计算时延扩展;
g)计算在研究时间段的总信噪比和总时延扩展;
h)改变基站的位置,重复以上步骤。
经过算法2的计算可以得到基站摆放的最佳位置,然后根据基站的最佳位置来调整RIS的位置以达到得到RIS摆放最佳位置的目的。在运算复杂度方面,移动RIS的算法复杂度为O(n0Ntn+Nd2n),其中n0为选取不同距离的次数,N为RIS总体的单元数量,tn为选取不同时间点的数量,dn为选取不同距离点的数量。由于每次移动RIS都要重新计算RIS每个单元的坐标,这使得计算的复杂度大大增加。本文算法整体的复杂度为O(n0Ntn+Ndn),由此可见算法复杂度较移动RIS的算法有所降低。
2 仿真与分析
2.1 仿真参数设置
本文是基于三维坐标系下讨论的,假设RIS都处于x-y平面上,且第一个RIS处于坐标轴中心位置,两个RIS的中心高度一样高且h=20 m。为了方便起见,本文的RIS反射单元的长和宽都设为1 m,即a=b=1 m,每个RIS行列的反射单元个数也是一样的,即M=N。BS的初始坐标为(-50,10,50),汽车的初始坐标为(0,0,100),汽车的初始速度为0,然后以2 m/s2的加速度朝着x轴的正方向移动。载波频率为2.4 GHz,带宽为1 MHz。发射功率PT为1 W,功率谱密度N0为10-6 W/Hz。本文考虑信号传播时所带来的损耗。为了更好地贴近现实,除了考虑自由路径所带来的损耗,还考虑由阴影衰落带来的损耗。阴影衰落所带来的损耗如式(24)所示。
PL=-20 lg A+10n lgdd0+σε(24)
其中:PL的单位为分贝(dB);A为每条路径的自由路径损耗;n为路径损耗指数,本文选取郊区环境场景,由此n取值为4。d为每条路径的视距距离;d0为参考距离;σ为标准差;ε为标准正态分布随机数,由于发射距离在一个信号波长数量级时存在天线近场效应,所以该模型通常只在发射距离d0<d时有效,由此本文选取参考距离为50 m。大多数对户外信道的研究支撑了标准差范围4~13 dB[19],由此本文标准差选取为4 dB。
由此式(18)可写为
Precived(t)=PT×10-PL10(25)
对于时间间隔的选取,本文选择了0~50 s的时间间隔进行研究。本文假设汽车的速度已经由GPS测出,并且通过GPS将汽车的瞬时速度传送给基站以及RIS,简而言之,汽车的速度信息是已知的。
2.2 匀速与匀变速仿真分析
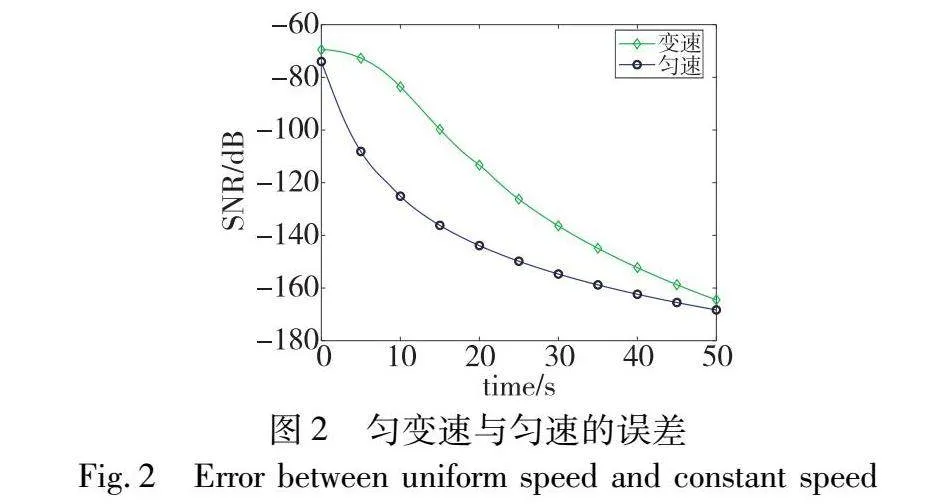
对于变速运动物体的接收端接收到的信噪比是否与匀速运动时接收到的信噪比一致,本节进行了仿真分析和讨论。在本节中,两个RIS全部都选取4×4的反射单元数量,且两个RIS间距400 m,时间间隔选择50 s,汽车1以2 m/s2的加速度朝着x轴的正方向移动,汽车2以50 m/s的速度朝着x轴的正方向移动,两辆车的初始位置相同,即(0,0,100)。匀变速运动和匀速运动的位移公式为
x=12at2,x=vt(26)
由此可知,在0~50 s时间段内,两辆车的位移相同。图2展示了匀变速运动和匀速运动的瞬时信噪比。由此可知,匀变速运动的瞬时信噪比与匀速运动的瞬时信噪比是不相同的。匀变速的汽车所接收到的瞬时信噪比总是比匀速运动的汽车所接收到的瞬时信噪比大。所以在现实研究RIS通信系统中的瞬时信噪比时,把变速运动简化为匀速运动是不可取的,这样做的后果会导致误差增大。
2.3 RIS之间的距离仿真分析
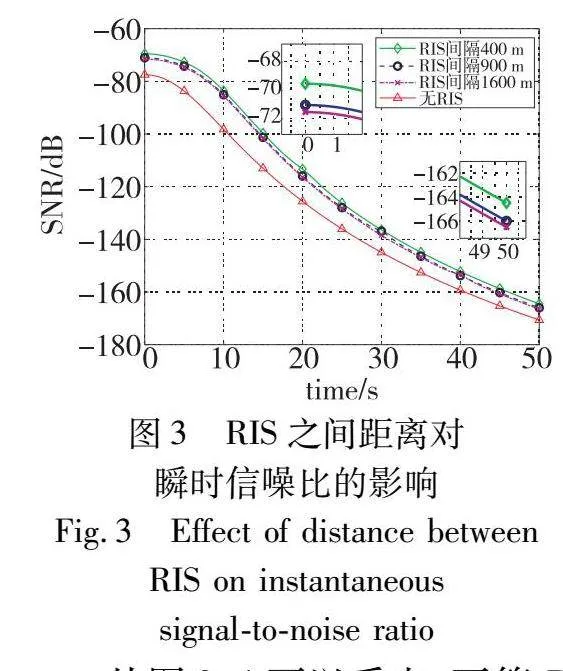
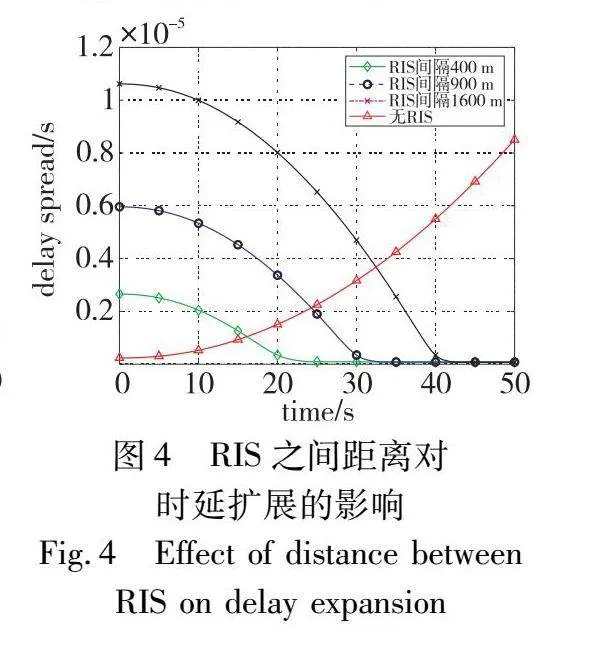
本节主要针对RIS之间的距离对接收端接收的瞬时信噪比和时延扩展的影响进行仿真验证。在本节中两个RIS还是取4×4的反射单元数量,在选取RIS距离方面,其中一个选取间隔400 m、900 m、1 600 m接收端接收的瞬时信噪比仿真结果如图3所示,接收端的时延扩展仿真结果如图4所示。
从图3、4可以看出,不管RIS间距多少,有RIS的最终性能效果总是比没有RIS的效果好。当RIS间距400 m时,接收端接收的瞬时信噪比比RIS间距900 m和1 600 m时效果好,并且在时延扩展方面,两者都取得较低的时延扩展,但总体时延扩展效果RIS间距400 m的时候比间距900 m和1 600 m的效果好。在20 s、30 s和40 s时,三条曲线的下降速度分别减缓了一下,这是因为在20 s、30 s和40 s时车辆正好位于第二个RIS的正前方,这使得此时的车辆相对于第二个RIS距离最短,超过第二个RIS后瞬时信噪比又变为原来的下降速度。总体来说,RIS间距越短,接收端接收的瞬时信噪比越大,并且时延扩展也能保持到一个较低的范围内。在现实场景中,由于资源以及环境问题,两个RIS之间的距离不可能无限地接近,所以在现实场景中,为了节省成本等问题,可以在现实允许的情况下尽可能地让RIS之间的间距变小,这样就可以使得汽车接收的瞬时信噪比尽可能大的同时,让时延扩展保持在较低的范围内。
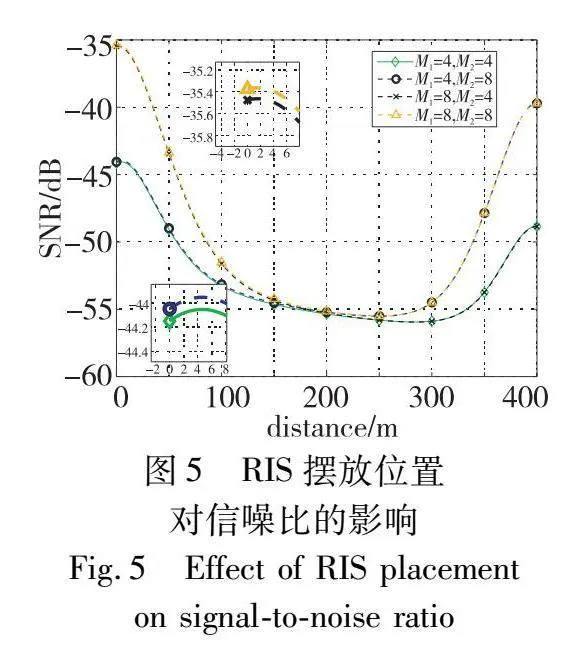
2.4 RIS摆放的位置仿真分析
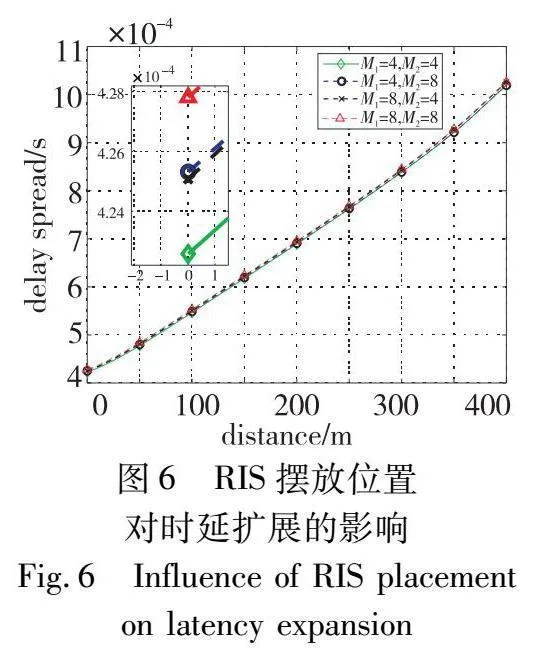
本节主要对RIS摆放的位置使得接收端接收的瞬时信噪比最大和保持较低的时延扩展进行的仿真验证。假设由于环境以及资源的影响,RIS之间最短的间距为400 m,根据上一章提出的相对位置以及算法2,对BS的位置进行仿真验证。由公式可以看出,当BS离RIS最近的时候接收到的增益是最大的,所以为了能够接收到最大的信噪比,BS位置的取值范围在两个RIS之间,即BS的x轴坐标取值为0~400,BS的y轴坐标与z轴坐标还是初始坐标。在现实情境中由于资源和环境问题,每个地方RIS反射单元的数量可能不尽相同,本节还研究了RIS数量对信噪比和时延扩展的影响,分别取了两个RIS都是4×4的反射单元,一个RIS为4×4的反射单元数量,另一个RIS为8×8的反射单元数量,还有两个分别选取了一个RIS为8×8的反射单元数量,另一个RIS为4×4的反射单元数量。接收到信噪比的仿真结果如图5所示。时延扩展仿真图如图6所示。
由图5可以看出,当两个RIS反射单元数量相同时,BS放在距离第一个RIS最近的位置接收到的信噪比最大,当两个RIS的反射单元数量不同的时候,BS位于离最多反射单元数量的RIS最近的地方信噪比最大。由图6可以看出,RIS的反射单元数量越多,时延扩展越大,这是由于随着RIS反单元数量的增多,信号的反射路径也变多,所以时延扩展会变大。当RIS反射单元数量总和相同时,不管BS放在哪个位置,它们的时延扩展都是一样的。在图6中,不管RIS反射单元的数量有多少,BS放在离第一个RIS最近的地方时延扩展最小,即汽车经过的第一个RIS。经过以上分析,让BS放在离汽车经过的第一个RIS最近的位置可以达到最大的信噪比,并且保持较低范围内的时延扩展。对于资源有限的情况下,可以让汽车经过第一个RIS的反射单元数量多一点,虽然时延扩展会多一点,但是相比较于信噪比的增幅大小,时延扩展的增幅还是很小的,相比较于图5,当第一个RIS的反射单元数量从4×4变为8×8时,信噪比增加了10 dB左右,而时延扩展只增加了4×10-6 s,并且时延扩展一直保持在较低的范围内,所以时延扩展的增幅可以忽略不计,这种情景适合于单行道的公路上,可以节省资源,对于双行道的公路还是每个RIS的反射单元数量一样比较好。最后根据相对位置,在RIS之间相对位置确定的情况下,让汽车经过的第一个RIS摆放在离BS最近的位置上,以达到接收端接收最大的信噪比以及保持较低范围内的时延。但是在现实情境中,RIS的反射单元数量可能会很多,这时时延扩展的影响就要考虑在影响的范围之内,所以需要合理地选取RIS反射单元的数量,在满足时延扩展范围的时候来达到最大的信噪比。
3 结束语
本文研究了在多RIS的通信系统下,对抗变速物体由于运动而引起的多普勒扩展和时延扩展,以及RIS的摆放位置使得接收端接收到最大信噪比的同时,保持较低范围内的时延扩展。本文适合各类公路上的车载通信,旨在解决在变速运动的情况下怎样利用有限的资源来达到最优的效果。实验证明,匀速运动与变速运动接收到的信噪比是不同的,所以不能把变速运动的物体简化为匀速运动的物体。在资源有限的情况下,RIS之间的距离越近,并且在RIS之间相对位置确定时,离汽车经过第一个RIS越近,接收端接收到的信噪比越大,时延扩展也能保持较低的范围。在资源允许的情况下,可以让汽车经过的第一个RIS的反射单元数量多一些效果会更好,具有重要的理论和现实意义。下一步工作将研究当车辆不规则运动时以及更多RIS的情况,同时研究RIS不规则摆放以及硬件损伤对系统的影响。
参考文献:
[1]Wu Jingxian, Fan Pingzhi. A survey on high mobility wireless communications: challenges, opportunities and solutions[J]. IEEE Access, 2016, 4: 450-476.
[2]Zhang Jiayi, Du Hongyang, Zhang Peng, et al. Performance analysis of 5G mobile relay systems for high-speed trains[J]. IEEE Journal on Selected Areas in Communications, 2020, 38(12): 2760-2772.
[3]Ge Yinghao, Zhang Weile, Gao Feifei, et al. High mobility massive MIMO with beamforming network optimization: Doppler spread analysis and scaling law[J]. IEEE Journal on Selected Areas in Communications, 2020, 38(12): 2889-2902.
[4]Zhang Jiayi, Liu Heng, Wu Qingqing, et al. RIS aided next-generation high speed train communications: challenges, solutions, and future directions[J]. IEEE Wireless Communications, 2021, 28(6): 145-151.
[5]Huang Chongwen, Zappone A, Alexandropoulos G C, et al. Reconfigurable intelligent surfaces for energy efficiency in wireless communication[J]. IEEE Trans on Wireless Communications, 2019, 18(8): 4157-4170.
[6]李一聪, 黄高飞, 周发升, 等. 基于智能反射面辅助与无线中继的无人机协作通信系统优化算法[J]. 计算机应用研究, 2022, 39(7): 2114-2119. (Li Yicong, Huang Gaofei, Zhou Fasheng, et al. Joint optimization algorithm for reconfigurable intelligent surface and wireless relaying assisted UAV communication system[J]. Application Research of Computers, 2022, 39(7): 2114-2119.)
[7]Qi Fei, Liu Qiang, Li Wenjing, et al. Enhanced 5G mobile broadcasting service with shape-adaptive RIS[J]. IEEE Trans on Broadcasting, 2022, 68(3): 704-711.
[8]Yang Ziyi, Hang Yu. Beamforming optimization for RIS-aided SWIPT in cell-free MIMO networks[J]. China Communications, 2021, 18(9): 175-191.
[9]Basar E. Reconfigurable intelligent surfaces for Doppler effect and multipath fading mitigation[J]. Frontiers in Communications and Networks, 2021, 2: 1-12.
[10]Wang Ke, Lam C-T, Nh B K. IRS-aided predictable high-mobility vehicular communication with Doppler effect mitigation[C]//Proc of the 93rd Vehicular Conference. Piscataway, NJ: IEEE Press, 2021: 1-6.
[11]Bjrnson E, Wymeersch H, Matthiesen B, et al. Reconfigurable intelligent surfaces: a signal processing perspective with wireless applications[J]. IEEE Signal Processing Magazine, 2022, 39(2): 135-158.
[12]Huang Zixuan, Zheng Beixiong, Zhang Rui. Transforming fading channel from fast to slow: IRS-assisted high-mobility communication[C]//Proc of ICC IEEE International Conference on Communications. Piscataway, NJ: IEEE Press, 2021: 1-6.
[13]Mei Weidong, Zhang Rui. Performance analysis and user association optimization for wireless network aided by multiple intelligent reflecting surfaces[J]. IEEE Trans on Communications, 2021, 69(9): 6296-6312.
[14]Mei Weidong, Zhang Rui. Cooperative beam routing for multi-IRS aided communication[J]. IEEE Wireless Communications Letters, 2021, 10(2): 426-430.
[15]Huang Chongwen, Yang Zhaohui, Alexandropoulos G C, et al. Multi-Hop RIS-empowered terahertz communications: a DRL-based hybrid beamforming design[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(6): 1663-1677.
[16]Do T N, Kaddoum G, Nguyen T L, et al. Multi-RIS-aided wireless systems: statistical characterization and performance analysis[J]. IEEE Trans on Communications, 2021, 69(12): 8641-8658.
[17]Khan M F, Mei Haoran, Rahim S, et al. Multi-RIS deployment for high data-rate communications[C]//Proc of International Conference on Networking and Network Applications. Piscataway, NJ: IEEE Press, 2022: 411-414.
[18]Wu Qingqing, Zhang Rui. Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming[J]. IEEE Trans on Wireless Communications, 2019, 18(11): 5394-5409.
[19]Goldsmith A J, Greenstein L J. A measurement-based model for predicting coverage areas of urban microcells[J]. IEEE Journal on Selected Areas in Communications, 1993, 11(7): 1013-1023.