基于深度学习的生态监测扑翼机系统设计
2024-09-14邱文艺关卓颖董陈岗


摘要:针对生态监测的需求,提出了一种基于STM32和深度学习的扑翼机系统设计。扑翼机具有高度的机动性和灵活性,能够在复杂环境中进行监测和数据采集。文章利用深度学习算法对扑翼机采集的生态环境数据进行分析和处理,以实现对生态环境的实时监测和数据分析。具体地设计了一种基于卷积神经网络的生态环境数据分析算法,能够实时地根据扑翼机采集的数据,对环境参数进行分类和识别。该系统由数据采集、无线收发、数据监控及数据存储等功能模块组成,使用高精度摄像头传感器实现对森林等地区环境参数的采集。实验结果表明,该系统具有较高的监测精度和实时性,能够为生态环境保护提供有效的数据支持。
关键词:STM32;深度学习;扑翼机;卷积神经网络
中图分类号:TN29 文献标识码:A
文章编号:1009-3044(2024)23-0031-03
开放科学(资源服务)标识码(OSID)
0 引言
随着科技的快速发展,仿鸟式扑翼机成了未来人造飞行器的发展趋势。本项目旨在研究设计一款基于深度学习的生态监测仿鸟式扑翼机,通过优化设计的双段翼结构、使用新型高强度材料、融合深度学习等人工智能算法,实现高效、准确的生态监测[1]。目前,国内外对于扑翼机的研究已经取得了一定的进展,但仍然存在一些关键问题需要解决,如飞行控制、动力和能源选择以及驱动机构等。
本项目将从结构设计、飞行控制、生态监测等方面进行研究设计。通过选用ARM芯片作为主控单元,对扑翼机进行飞行姿态控制,并结合基于深度学习的视觉识别模块进行生态监测。最终实现一款能够智能执行自主巡航任务、高效准确进行生态监测的仿鸟式扑翼机,为保护生态环境提供有力的技术支持。
1 系统功能及总体设计
1.1 系统功能综述
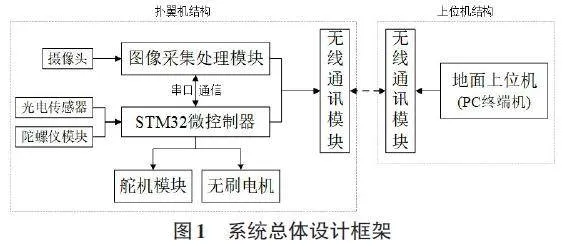
本系统的主要关键在于仿鸟式扑翼机搭载了图像处理模块后,在空中的飞行姿态控制以及对采集到的图像等环境数据进行处理操作。在扑翼机进行区域巡航飞行时,其上搭载的STM32微控制器将根据陀螺仪数据获取当前扑翼机的翻滚角、俯仰角与航向角,将当前飞行姿态角度与预设值进行比较,通过PID控制器的计算后,分别控制扑翼机构与尾翼的舵机结构,实现扑翼机飞行中的姿态控制。同时,在进行姿态控制的过程当中,Maix Dock摄像头模块与STM32微控制器之间通过串口进行实时通信,并根据预设巡航信息进行图像的拍摄以及预处理,然后通过无线通讯模块[2]将相关传感器数据以及图像数据传输至地面上位机观测站,即PC终端机。
当然,在扑翼机巡航过程中,地面观测人员可以通过上位机发送修改参数给扑翼机,使扑翼机临时更改预设的巡航数据,做到更好地适应工作环境。
1.2 系统总体设计
系统主要以搭载了K210处理器的Maix Dock模块作为图像采集和处理传感器,STM32F4作为主控制器,小型金属舵机作为控制尾翼摆动的动力源,直流无刷电机作为驱动扑翼机构做到扑翼飞行的主要动力,构成用于采集生态数据信息的扑翼飞行硬件平台[3]。系统中的上位机主要由PC机构成,与扑翼机之间通过无线通讯模块建立通讯网络。系统总体设计框架如图1。
2 系统硬件设计
2.1 扑翼机结构设计
在扑翼机的结构设计中,应考虑到需要搭载在其上的几类功能模块,如Maix Dock图像处理模块与摄像头、STM32F4微控制器主控板与传感器、舵机与无刷电机组成的动力单元以及无线通讯模块。因此,扑翼机需要足够的载重能力。为了满足这一要求,我们将采用翼展1.2米至1.4米的扑翼结构设计,并使用碳纤维材料作为主体结构的材料。这种设计不仅能够减轻扑翼机自身的重量,还能为各个结构提供更高的强度保障。
在扑翼机的机身设计中,我们将采用CNC加工切割技术,将3毫米的碳纤维板材切割成整体镂空状态。单侧的机翼将以一根4毫米的碳纤维杆为主要支撑,同时使用轻质高强度的尼龙布料作为翼膜,并利用多根1毫米的碳纤维杆作为辅助支撑,从而形成整体机翼。尾翼的设计同样使用了碳纤维杆与高强度轻质尼龙布料制成扇形。在机翼与机身、尾翼与机身的连接处,由于是非标准结构,且要求重量轻,我们将采用3D打印技术,使用高强度尼龙材料作为连接件[4]。扑翼机机身图纸,如图2所示。
2.2 微控制器
2.2.1 Maix Dock模块
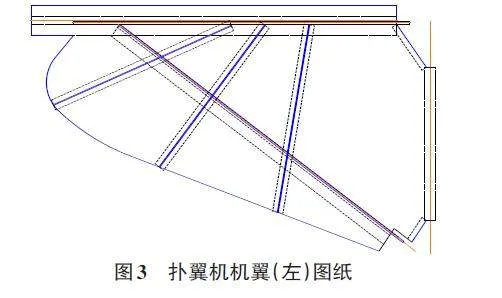
Maix Dock模块上的系统级勘智K210芯片采用28纳米先进技术,搭载RISC-V 64位双核处理器,专为机器视觉而设计。这款芯片最引人注目的特点是KPU,它可以轻松应对卷积人工神经网络的计算需求。此外,K210还配备了快速傅里叶变换加速器,使FFT计算更加高效。因此,这款芯片可以毫不费力地处理大多数机器学习算法,展现出卓越的性能。扑翼机机翼(左)图纸,如图3所示。
2.2.2 STM32微控制器
STM32F407微控制器是意法半导体公司生产的一款基于Cortex-M4内核的32位微控制器,最高工作频率可达168MHz,具有浮点运算单元和DSP指令。该控制器具有丰富的外设接口,如I2C、SPI、USART、TIM等,能够满足多种应用场景的需求。此外,STM32F407还支持多种通信协议,如CAN、USB、Ethernet等,方便用户进行数据传输和控制。扑翼机利用STM32微控制器作为主控制器,实现对飞行姿态进行PID自动控制运算。
2.3 传感器
2.3.1 陀螺仪
MPU6050陀螺仪是一款高性能的传感器模块,内置三轴MEMS陀螺仪和三轴MEMS加速度计,配备数字运动处理引擎(DMP) 和辅助I2C端口,支持连接第三方数字传感器。该模块采用16位模/数转换器(ADC) ,将陀螺仪和加速度计的数据转化为数字量输出,通过I2C与STM32微控制器进行数据传输,获取扑翼机实时的姿态数据。此外,MPU6050还内置了可编程的低通滤波器,可用于传感器数据的滤波。该模块用于测量扑翼机扑翼飞行时的加速度、角速度和气压等重要数据信息。
2.3.2 光电传感器
红外反射式光电传感器具有体积小、重量轻、功耗低、响应速度快、抗干扰能力强等优点,适用于各种小型飞行器的避障系统。通过安装多个红外反射式光电传感器,可以实现对扑翼机周围环境的感知和避障。当红外光遇到障碍物时会被反射回来,然后被红外接收器接收。通过检测红外光的反射情况,可以判断前方是否有障碍物,从而调整扑翼机的飞行方向,避免与障碍物发生碰撞。这种光电传感器在扑翼机避障中发挥着重要作用。
3 系统软件设计
3.1 深度学习算法
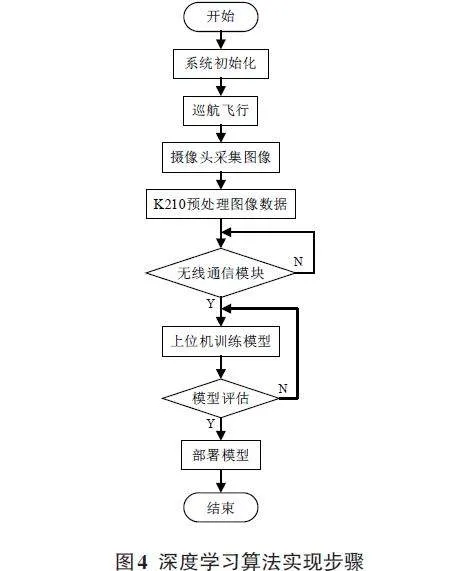
本文设计了基于卷积神经网络的生态环境数据分析算法,实现这个算法主要有以下几个步骤:数据收集、数据预处理、卷积神经网络构建[5]、模型训练、模型评估、模型应用。实现上述算法的基础是搭载了K210芯片的Maix Dock模块、摄像头以及PC上位机等硬件设备,并在已有的设备中搭建Google公司开发的Tensorflow框架。
在扑翼机在全新区域进行巡航监测前,首先利用摄像头采集生态环境的图像数据,并实时传输至Maix Dock模块中,通过其上的处理器对图像数据进行初步的去噪、缩放、归一化等处理操作。同时,还会进行特征提取和选择,以提取与生态环境相关的关键特征。然后,使用扑翼机上搭载的无线通讯模块将预处理后的数据信息传输至上位机,利用在PC上设计构建的卷积神经网络进行模型训练,将训练后符合评估标准的模型再次部署至扑翼机上搭载的Maix Dock模块中。深度学习算法实现步骤,如图4所示。系统主流程图,如图5所示。
扑翼机在进行生态区域的连续巡航监测过程中,将会直接通过部署了训练模型的Maix Dock模块与摄像头实时监测生态环境的图像信息,仅需将异常数据与巡航日志发送至上位机即可。
3.2 PID(比例-积分-微分)控制器
本系统通过扑翼机的姿态角与预设巡航的姿态角之差,通过PID算法来控制主控制器STM32输出的PWM信号,使得舵机带动尾翼的翻转实现扑翼机的姿态控制调整,直到扑翼机按照预设的航向进行巡航任务[6]。
在经典的PID控制器中,将实际值与目标值之间的差值称为系统误差。这个误差信号会作为PID控制器的输入。控制器处理这个输入后,会输出一个信号[u(t)]。对于连续时间系统,PID控制器的数学表达式如式(1):
[u(t)=Kpe(t)+Ki∫t0e(τ)dτ+Kdde(t)dt] (1)
其中:[u(t)]是控制器的输出,[e(t)]是系统误差,[Kp]、[Ki]和[Kd]分别是比例、积分和微分系数。这个公式揭示了PID控制器的基本结构,它是由比例、积分和微分三个部分组成,控制器先将误差乘以比例增益[Kp],再对误差进行积分,然后进行微分,最后三者之和为输出[u(t)]。而计算机等数字系统对数据处理都应离散化,所以对于离散时间系统下的PID公式如式(2):
[uk=Kpek+Kiτ=0keτ+Kd(e[k]-e[k-1])] (2)
离散PID一般分为2种算法,一种是增量式PID,另一种是位置式PID,本系统采用了位置式PID,若采样周期为T,则离散位置式PID公式如式(3):
[u[k]=Kpe[k]+KiTτ=0ke[τ]+Kd(e[k]-e[k-1])] (3)
相较于普通PID算法,可以使扑翼机姿态调整更加稳定。
4 系统测试结果
系统采用上位机与下位机结合的应用形式,通过上位机可以获取扑翼机的监测数据信息,并在卷积神经网络中训练模型,通过无线通讯模块将训练、评估后的模型部署到扑翼机当中。同时上位机也可以远程修改扑翼机中的预设飞行信息,做到实时调整扑翼机的飞行路线与监测任务。
在扑翼机自主巡航监测生态数据的过程当中,大部分图像信息将优先通过K210处理器的处理,其中部署的是预先训练的模型信息。若是数据监测到异常状态,扑翼机会把异常信息的图像数据即时传输至上位机终端,其余信息将存储至机身搭载的数据存储设备中,作为日志信息供后续查阅,这样就可避免无线传输时数据延迟、丢失等问题。
同时在扑翼机的扑翼飞行过程当中,PID控制器能够很好地调整扑翼机飞行姿态,使其能够良好地执行预设的飞行监测任务,在任务过程当中受到环境干扰能够准确修正飞行状态,并可在任务完成后准确地返航。
5 结束语
本文设计的基于STM32和深度学习的扑翼机生态监测系统,能够利用扑翼机在多种环境中采集生态数据,并使用深度学习算法对数据进行分类和识别,实现生态环境的实时监测和数据分析。系统由数据采集、无线收发、数据监控和数据存储等功能模块组成,可对森林等局部地区的环境参数进行精确采集。最终测试结果表明了,该系统所具有的高监测精度和实时性能够为生态环境的保护提供有效支持。
参考文献:
[1] 李勇欣,张兆海.加强生态环境检测及环保技术应用探讨[J].濮阳职业技术学院学报,2023,36(5):17-19.
[2] 甘绪桐,陈宝瑞,熊剑敏,等.基于LoRa无线通信技术的电气火灾监测方法研究[J].现代传输,2023(6):42-45.
[3] 邬毅松.无线低功耗大容量数据采集系统的设计[J].电脑知识与技术,2023,19(21):94-96.
[4] 马程,熊晓松,吴昊,等.扑翼机结构设计及运动仿真[J].中国教育技术装备,2020(14):27-29.
[5] 黄繁章.仿鸟扑翼机器人结构优化与自主飞行控制研究[D].南京:东南大学,2021.
[6] 朱亚军,陈砆兴.基于机器视觉的目标识别方法的研究进展[J].科技资讯,2023,21(21):21-24.
【通联编辑:朱宝贵】