基于改进YOLOv5的机车轮对踏面缺陷检测
2024-09-03曹勇飞乌伟顾焱

摘要:针对传统机车轮对踏面缺陷检测方法难以准确、快速、有效地检测出踏面缺陷的问题,文章提出了一种基于YO⁃LOv5算法的两阶段目标检测模型。首先,对YOLOv5检测网络采用Ghost进行轻量化设计,并引入注意力机制以强化重要特征的表达能力,从而提高模型的检测速度,降低模型复杂度。同时,精简踏面提取特征融合网络结构,改进原始先验框以适配数据集。实验结果表明:在踏面提取阶段,算法仅损失0.26%精度的基础上,检测速度提高了43.4%;在缺陷检测阶段,检测精度提高了1.72%,检测速度提高了30.4%。改进后的模型算法复杂度显著降低,具有一定的工程应用价值。
关键词:计算机视觉;深度学习;YOLOv5;轮对踏面缺陷
中图分类号:TP391.4 文献标识码:A
文章编号:1009-3044(2024)19-0014-03
0 引言
机车轮作为机车车辆的重要组成部分,起着支撑车体和导向的关键作用。车轮踏面在强烈的轮轨作用力下,容易产生包括车轮扁疤、踏面剥离擦伤在内的一系列踏面缺陷。这些缺陷会加剧车辆结构振动,影响列车运行的平稳性。如果不能及时发现处理,缺陷会进一步恶化,严重威胁列车的行车安全。因此,及时监测车轮踏面健康状况对行车安全至关重要。
针对这一问题,国内外学者提出了一系列踏面缺陷检测方法,主要包括:轮轨力检测法、振动检测法、超声波检测法以及图像检测法[1]。然而,这些方法或因成本高昂,或因受行车环境光线影响较大,难以实际部署应用。现阶段主要采用图像检测算法进行工业缺陷检测,其具有成本低、检测速度快、识别精度高等优点,能够在复杂环境中准确确定目标位置,具有良好的鲁棒性。同时,该方法可以有效取代烦琐的人工检测,实现列车智能化运维。
国内外学者基于计算机视觉进行工业缺陷检测也做了诸多研究。例如,侯涛等[2]使用改进Canny算子的传统边缘检测算法对车轮踏面损伤进行边缘检测。何静等[3]提出Canny-YOLOv3两步检测算法,首先运用Canny 边缘检测算法分割踏面区域,再采用YOLOv3算法进行踏面损伤检测,提高了检测精度和效率。
本文提出了一种基于改进YOLOv5算法的两阶段目标检测神经网络模型。该算法在ROI阶段基于目标尺寸去除冗余的特征尺度,同时基于K-means对数据集聚类,选取适配度更高的锚框作为先验框,使检测模型更好地适应大目标检测。此外,引入注意力机制,提高了模型的检测速度。
1 踏面缺陷检验算法流程
为提高踏面损伤的检测速度,本文提出一种基于YOLOv5的两阶段损伤检测模型。踏面损伤检测的过程分为感兴趣区域(ROI) 提取和缺陷检测两个阶段。
感兴趣区域提取阶段[4]:为满足图像目标检测的准确性和及时性,首先需要对相机采集的图像进行分割,提取出感兴趣的踏面信息,以减少计算量和损伤误检。缺陷检测阶段[5]:将通过感兴趣区域提取网络获得的踏面信息作为缺陷检测阶段的输入,进行踏面缺陷检测。由于踏面的缺陷大小多变且检测目标不稳定,本研究在YOLOv5的基础上改进得到负责多尺度目标检测的缺陷检测网络,实现对踏面损伤的准确识别。
两阶段的检测方式能够提高检测精度,但同时也成倍增加了模型的计算量。为了提高模型的检测速度和项目实际部署的可行性,本文对模型进行了轻量化设计,使模型兼顾精度和速度。
2 YOLOv5 算法介绍
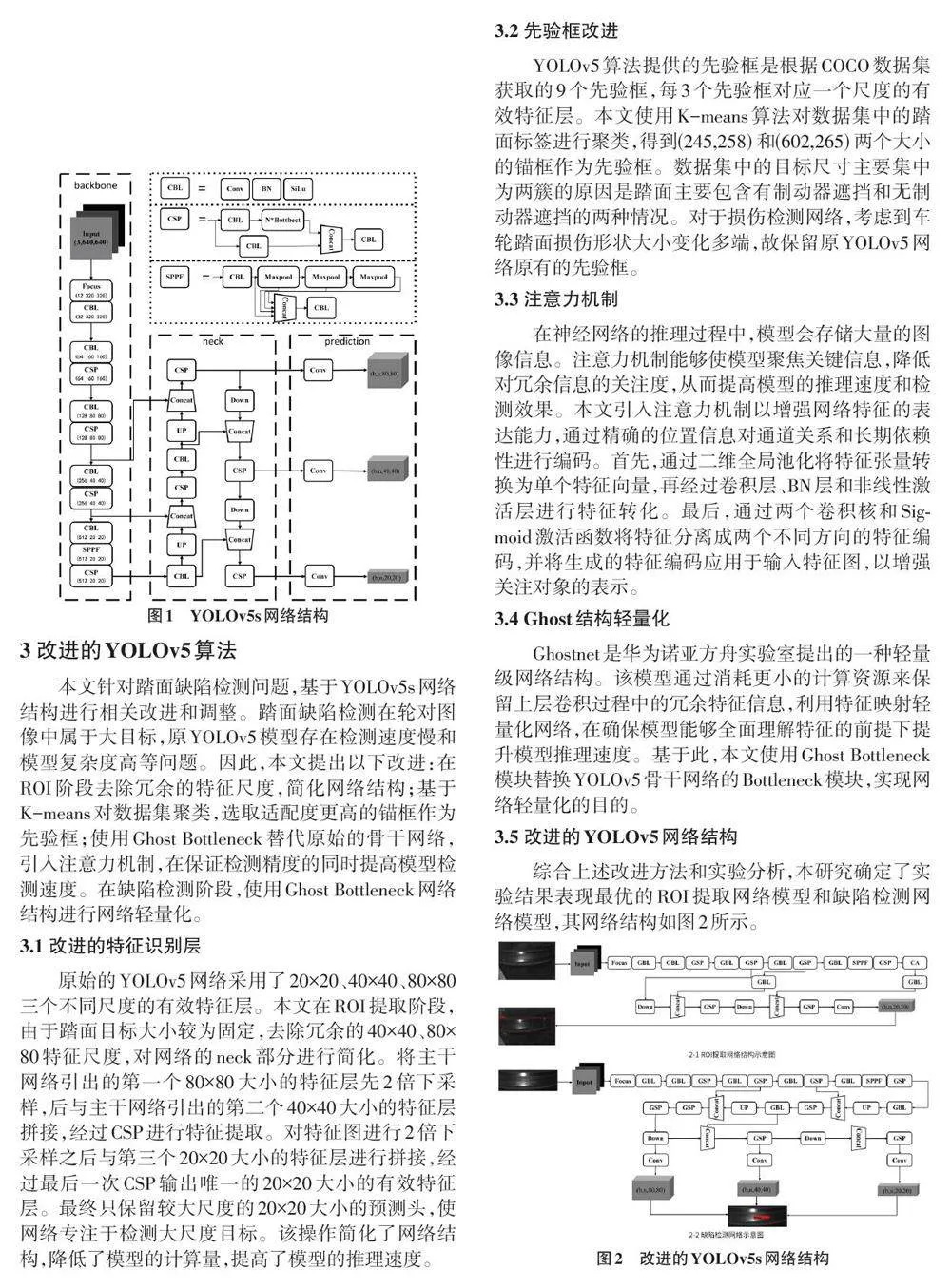
YOLOv5网络作为单阶段目标检测模型,融合了之前YOLOv1~4系列模型的优点,并在此基础之上做了相关改进,使模型的检测速度和检测精度有了巨大提升。YOLOv5s网络是YOLOv5系列网络中宽度和深度最小、最轻量化的网络结构,拥有较快的检测速度。YOLOv5具体网络结构如图1所示,其网络结构主要包含以下部分:主干网络backbone,负责图像的特征提取;特征融合层neck,通过添加FPN+PAN特征金字塔结构融合不同尺度特征语义信息,加强特征提取;预测头prediction,通过anchor机制计算目标损失并得到预测框。
