基于固定时间扰动观测器的非奇异终端滑模控制器的研究
2024-08-01王荣政戚梦珂金山海



关键词:滑模控制;固定时间理论;扰动观测器;Lyapunov 稳定性
中图分类号:TP273 文献标识码:A
0 引言
非奇异终端滑模控制凭借算法简单、鲁棒性好和可靠性高,被广泛应用于运动控制中[1]。但所有滑模控制都会不可避免地引起抖振问题,基于扰动观测器的控制算法应运而生[2]。分析发现,如果能够充分利用模型的状态空间描述,对输出信号的总扰动加以估计并进行前馈补偿,另外再结合非奇异终端滑模控制方法,往往能够取得较为满意的控制效果[3-4]。
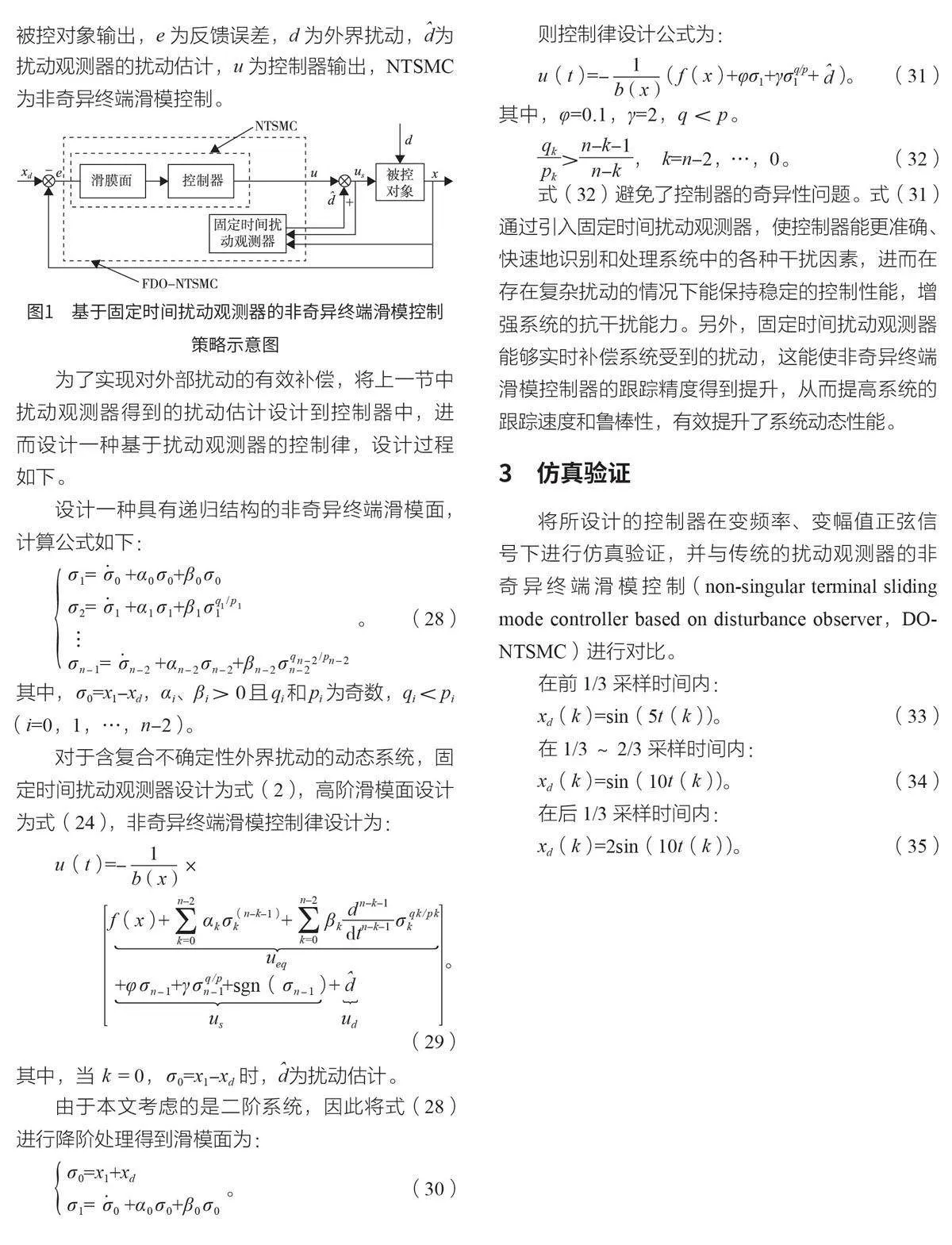
基于扰动观测器和非奇异终端滑模控制理论,本文设计了一种基于固定时间扰动观测器的非奇异终端滑模控制(non-singular terminal sliding modecontroller based on fixed-time disturbance observer,FDO-NTSMC)策略。
对于上述的正弦信号,分别用DO-NTSMC 和本文提出的FDO-NTSMC 对变频率、变幅值的正弦信号跟踪控制性能做仿真实验。在DO-TSMC 和FDO-NTSMC 作用下的变频率、变幅值正弦信号位置轨迹跟踪图如图2 所示。首先,在图2b 中,本文对比了DO-NTSMC 与FDO-NTSMC 对变频前正弦信号位置跟踪的效果。仿真结果表明,FDONTSMC不仅能够在幅值和相位上更好地逼近期望位置轨迹,而且在放大仿真图中并未出现抖振现象,显示出其优越的性能。图2c 则呈现了正弦信号的变频率跟踪仿真图像,在3 s 时,信号频率翻倍,而幅值保持不变。通过对比,发现FDONTSMC在频率突变前后均能够精确地跟踪目标值,而DO-NTSMC 则存在较大的误差。特别是在频率突变后,FDO-NTSMC 能够迅速适应并减小误差,同时避免抖振现象的发生。图2d 展示了频率突变后的跟踪情况,其中FDO-NTSMC 的相位滞后较小,相较于DO-NTSMC,其具有更高的跟踪精度。此外,图2e 展示了正弦信号变幅值跟踪的仿真结果。在6 s 时,信号幅值翻倍,频率保持不变。对比仿真结果,本文发现FDO-NTSMC 在幅值突变前后均能更准确地跟踪目标轨迹,而DO-NTSMC的误差较大。图2f 呈现了幅值突变后的跟踪图像,进一步证明了与DO-NTSMCF 相比,FDO-NTSMC具有更小的相位滞后和更高的轨迹跟踪精度。
4 结语
本文提出的基于固定时间扰动观测器的非奇异终端滑模控制,能够在固定时间收敛到目标值,且没有抖振现象,跟踪性能优越。由于提出的控制器参数过多,未来还需要进一步调整模型,寻找最佳值;同时目前仿真验证的被控对象较为简单,下一步还将尝试将该模型应用于较为复杂的机械臂模型中。
