草坪维护机器人设计与运动控制试验
2024-07-10王梓耘,李文彬,徐道春,白效鹏,郭朋
王梓耘,李文彬,徐道春,白效鹏,郭朋

摘要:针对城市内的小型复杂草坪环境,提升草坪维护工作的全面化及智能化水平,提出一种草坪维护机器人,设计其整体控制系统与平台结构,并采用模块化的方式实现草坪维护的功能。该平台采用后两轮差速式四轮底盘结构,具有更好的行驶灵活性。为实现机器人平台的精确控制,使其按照预期设定的指令行进,在对运动模型进行运动学分析的基础上,采用增量式PID控制算法实现速度闭环控制。对机器人平台设置直线行驶与旋转角度测试,测试结果显示机器人采用速度闭环控制方式在0.5 m/s的速度下直行3 m产生的平均竖直与水平误差均小于3 cm,在0.5 rad/s的旋转角速度下旋转45°、90°、180°角度平均误差均小于2°,验证了增量式PID控制算法的可行性。根据测试结果选定草坪维护机器人的具体行驶参数,为后续实现草坪的全自动维护工作提供了技术支持。
关键词:草坪维护;模块化;平台设计;运动学分析;PID控制
中图分类号:S776.2;S776.4文献标识码:A文章编号:1006-8023(2024)03-0178-06
Design and Motion Control Experimental of Lawn Maintenance Robot
WANG Ziyun, LI Wenbin*, XU Daochun, BAI Xiaopeng, GUO Peng
(School of Technology, Beijing Forestry University, Beijing 100083, China)
Abstract:In order to enhance the comprehensive and intelligent level of lawn maintenance work in small and complex urban environments, a lawn maintenance robot was proposed in this paper. The overall control system and platform structure were designed, with a modular approach employed to implement lawn maintenance functionalities. The platform was equipped with a four-wheel chassis utilizing a differential-drive mechanism, thereby providing superior maneuverability. To achieve precise control of the robot platform and ensure it adhere to the designated instructions, based on the kinematic analysis of the motion model, an incremental PID control algorithm was used to realize the speed closed-loop control. Straight-line and rotational angle tests were conducted on the robot platform, revealing that under a velocity closed-loop control system, the robot maintained an average vertical and horizontal error of less than 3 cm while traveling 3 meters at a speed of 0.5 m/s. At a rotational speed of 0.5 rad/s, the robot exhibited an average error of less than 2° when rotating at angles of 45°, 90°, and 180°, confirming the feasibility of the incremental PID control algorithm. Based on the test results, specific operational parameters for the lawn maintenance robot were selected, providing technical support for the subsequent realization of fully automated lawn maintenance tasks.
Keywords:Lawn maintenance; modular; platform design; kinematic analysis; PID control
0引言
随着经济的发展和社会的进步,人们对绿化工作更加重视,而草坪在美化环境、固土护坡和净化空气等方面也扮演着越来越重要的角色,因此,草坪的维护需求也在不断增加[1]。面向城市环境的草坪维护,主要集中于私家别墅的草坪、小区绿化带草坪和校园内草坪等,而在国内,大多数草坪的维护工作仍然采用传统的人工操控机器的方式,此方式工作强度大、时间成本高、环境污染严重,且容易引起人员受伤[2],利用机器人代替人工的方式可以减少人力消耗,提升效率,降低人员受伤风险[3]。
目前,城市草坪维护领域的成熟产品普遍仍然停留在低智能化的阶段,作业方式通常为埋设可通电导线以围成封闭的工作区域,机器人接近边界线时自动转向离开边界区域,确保在指定区域内工作。此方式有很强的局限性,并且会因重复工作而造成能源浪费的问题[4]。为解决此问题并且提升草坪维护机器人的智能化水平,现有研究利用不同的传感检测技术(如GPS定位、视觉和激光技术等)测试机器人在草坪环境中的自主导航定位效果[5]。
然而,目前国内外有针对大面积草坪的较大型自动维护设备[6],这些装备不适用于日益发展的城市口袋公园、别墅和家庭庭院等小面积不规则的草坪。小型草坪环境复杂、障碍物较多,主要是花草和设施密集[7]。面向此环境,GPS定位会因树木等高大障碍物遮挡而影响稳定性[8],视觉技术中的相机在极端天气下会因光线和大气条件的影响失准[9]。鉴于以上问题,基于激光雷达的导航定位方法成为更可靠的方案。
同时,在城市内的草坪维护任务中,大多数只对草坪进行单一化的整体修剪,并未涉及杂草根除、打洞通气等全面维护措施,这会导致二次生长的杂草竞争夺取太阳光照以及草坪生长所需空气、水分和养料不足等问题[10],不利于草坪的健康与美观。
基于上述情况,本研究设计了一款草坪维护机器人,主要探究其底盘平台设计及运动控制问题,使其具备小型化及高智能化的特点,满足城市小面积且障碍物较多的复杂草坪维护需求。同时,通过模块化设计的方式[11],将草坪修剪、杂草根除和打洞通气等功能分别设计为独立的应用任务模块,并安装于平台中工作,从而提升草坪维护机器人的多功能性与灵活性,实现全面草坪维护的功能。
1草坪维护机器人设计
1.1 总体控制系统设计
本研究中的草坪维护机器人平台是一个完整的机电系统,需要在机械结构设计的基础上,融合运动控制、建图定位和路径规划等多项技术,并增添草坪维护的应用任务模块。基于此功能需求,完成草坪维护机器人的总体控制系统设计,此平台在机器人本体的基础上,总体控制系统包括主控系统、传感器模块、运动执行模块、远程监控系统、动力系统及应用任务模块等,草坪维护机器人的总体控制系统设计如图1所示。
主控制系统包括上位机Jatson Nano主开发板与下位机STM32多功能控制板,上位机负责自主导航算法的运行,下位机负责实现运动控制,上下位机通过串口通信完成机器人的综合控制;传感器模块以激光雷达为主传感器,负责采集外界草坪环境信息及机器人平台自身的位姿数据,为后续自主导航提供必要的数据信息;运动执行模块接收STM32的运动控制指令,实现机器人运动的精确控制;动力系统采用锂电池供电为机器人平台提供动力。
应用任务模块采用模块化设计的方式,将草坪维护的各个子任务设计为相应的独立模块,安装在平台中工作。此设计方式中的各模块可以轻松地进行替换与升级,增强草坪维护工作的灵活性。目前应用任务模块包括草坪修剪模块、杂草清除模块,其中,草坪修剪模块采用直流电机驱动刀具旋转实现草坪的整体修剪,杂草清除模块采用机械臂带动除杂草旋切钻实现杂草的根除。后续平台还会添加打洞通气模块、浇水施肥模块等,实现平台的多功能化及草坪维护的全面化。
1.2平台结构设计
基于上述整体控制系统,进行草坪维护机器人平台的机械结构设计。本平台在机器人本体的基础上,为保证在草坪中具备良好的移动行走功能,采用后两轮差速驱动式四轮底盘结构,即后两轮采用轮毂电机,实现差速驱动;前两轮采用万向轮,主要用于辅助移动、转向以及支撑机体。此方式保证机器人具有最小的转弯半径,在发生意外情况时,可以迅速对草坪维护机器人进行复位[12]。同时搭载上述控制系统及草坪维护应用模块。平台总体结构模型如图2所示,根据结构模型进行机器人平台实物搭建,实物如图3所示。
2草坪维护机器人运动控制分析
2.1两轮差速驱动运动学分析
本研究中的草坪维护机器人平台,采用两轮差速驱动的方式,即通过独立调节左右两驱动轮的不同速度,控制机器人的运动。若左右两驱动轮的速度相同,则机器人做直线运动前进或后退;若左右两驱动轮的速度不同,则机器人实现转向操作[13]。两轮差速底盘运动模型如图4所示。
运动模型图4中各参数代表:W为2个驱动轮的距离,m;VX为机器人在O点的目标前进速度,前进为正,m/s;VZ为机器人绕O点的目标旋转速度,逆时针为正,rad/s;VL、VR为机器人左右轮速度前进为正,m/s;R为机器人同时前进和旋转产生的转弯半径,m;AL、AM、AR为机器人左轮、O点、右轮在一定时间t内走过的路径,m;θ为机器人在一定时间t内旋转的角度,rad。基于此运动模型,进行两轮差速式机器人底盘的运动学分析。
由速度对时间的积分等于路程得
AL=VL×t
AM=VM×t
AR=VR×t。(1)
由弧长除以半径等于弧度得
θ=ALR-W2=AMR=ARR+W2。(2)
θ=VL×tR-W2=Vx×tR=VR×tR+W2 。(3)
解算后可得运动学逆解公式,已知目标速度Vx、Vz求驱动轮的目标速度VL、VR
VL=Vx-W2×Vz。(4)
VR=Vx+W2×Vz。(5)
同时得运动学正解公式,已知驱动轮的当前速度VL、VR求当前机器人的实时速度Vx、Vz
Vx=VL+VR2。(6)
Vz=VR-VLW。(7)
2.2PID闭环控制
草坪维护机器人在草坪环境工作中,会面临越过小型障碍物、打滑、颠簸和空转等非正常运行情况,使机器人平台无法按预期的方式行进[14]。为保证轮毂电机处于稳定可控的状态,达到期望的轮速控制,本研究采用PID控制器进行闭环控制调节[15-17]。PID控制器分为模拟控制器和数字控制器,相较于模拟控制器,数字控制器具有更高的精度,更大的灵活性,更好的稳定性。数字式PID控制器可以表示为[18]
u(k)=kpek+ki∑kj=0ej+kd(ek-ek-1)。(8)
式中:ek为k时刻给定值与实际输出值的差值;kp作用为放大控制偏差,使控制器的调节速度加快,但系统的超调量会随之增大;ki作用为消除稳态误差;kd作用为预判误差变化,对系统提前施加一个控制量,从而改善稳定性。
数字式PID控制算法分为位置式PID和增量式PID。其中,位置式PID为全量输出方式,通过将当前误差值与过去的误差值进行累积来计算输出,这种累积导致误差随时间增长,可能会放大计算错误的影响并导致一定的超调。而增量式PID只输出增量,不需要累积偏差,运算量小,实时性更好[19],增量式PID控制算法通过解算后可得增量Δu(k)为[20]
Δu(k)=u(k)-u(k-1)=kp(ek-ek-1)+kiek+
kd(ek-2ek-1+ek-2)。(9)
式中:ek代表本次偏差;ek-1代表上一次偏差;ek-2代表上两次偏差,通过此公式可得出,增量式PID控制算法的偏差只需要累积3次的偏差量,动态响应更快,稳定性更强。因此本研究采用增量式PID控制算法,利用增量Δu(k)调节PWM输出信号,以控制电机转动,使其趋于设定转速,实现闭环控制以成功执行预期速度指令[21],PID控制系统图如图5所示。
2.3运行试验
本研究为了确保草坪维护机器人按照指令行驶与准确定位,需要精确控制其行驶距离和转动角度。据此,在北京林业大学绿化带草坪针对机器人的直行与旋转进行试验,通过电脑端下达控制指令,设定行驶距离、前行速度和旋转角度等参数并测量真实运动数据结果进行对比分析,测试机器人运动控制效果。
2.3.1直线行驶测试
为对比位置式PID控制算法与增量式PID控制算法的控制调节效果,以及选择合适的运动行驶参数,分别设置直线行驶试验。
位置式PID实现位置闭环控制:同一速度但不同距离的直线行驶试验。
增量式PID实现速度闭环控制:同一距离但不同速度的直线行驶试验。
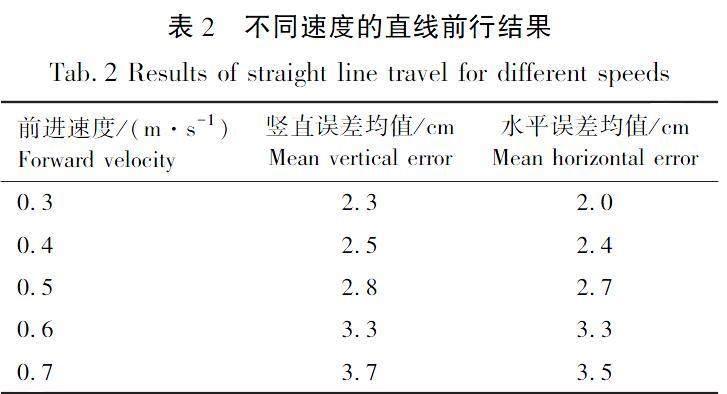
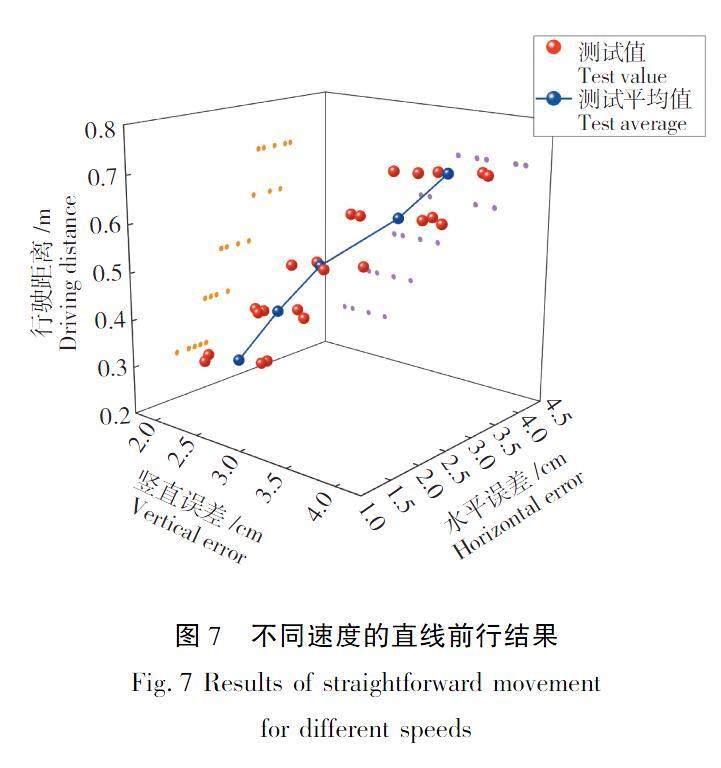
其中,不同距离测试时,设置前行速度均为0.5 m/s;不同速度测试时,设置前行距离均为3 m。每组设置5次试验,共计50次试验,测量竖直误差与水平误差结果并取平均值。不同距离的直线前行结果见表1和图6,不同速度的直线前行结果见表2和图7。
竖直方向为机器人前行方向,其误差除环境因素外,主要源于机器人在启停变速过程中产生的加速度。在位置闭环控制中,此加速度会导致更严重的超调现象,因此其误差会大于速度闭环控制。试验结果印证了这一点,前行速度为0.5 m/s,前行距离为3 m时,采用速度闭环控制产生的误差小于位置闭环控制。
同时从试验结果看出,随着距离和速度的增加,误差均呈递增趋势,但在位置闭环控制中,递增趋势更为明显。由于草坪环境并非完全平坦,位置式PID控制算法全量输出的方式导致偏差值一直累积,运行过程中的环境因素影响会放大控制输出的波动,影响了稳定性。
同时试验证明,在相同的行驶距离中,不同速度会引发不同程度的误差。过高的速度设定会使误差显著增加,过低的速度设定会降低任务完成效率,此外,低速情况下速度闭环控制也会出现调速不均匀的情况,导致误差并未降低,因此需要设定适当的目标速度平衡误差和执行效率之间的关系。本研究最终选用0.5 m/s的设定速度,此工作速度下直线前行3 m产生的平均竖直误差与水平误差均小于3 cm,误差处于可接受范围内,可以满足实际的工作需求。
2.3.2旋转角度测试
针对草坪维护机器人的旋转角度进行测试,设置旋转角速度为0.5 rad/s。为模拟草坪维护机器人实际工作中的旋转需求,分别对旋转角度45°、90°、180°进行各5次试验,并对结果取均值进行分析,试验结果见表3。
试验结果表明,随着旋转角度的增加,旋转误差呈现递增趋势。然而,当旋转角度较小时,误差也相对较大。这是因为在小角度旋转时,运动过程较短,变速过程所占比例较大,从而导致误差的增加。由表3数据可知,草坪维护机器人平台在旋转角度45°、90°、180°的情况下,角度平均误差均小于2°,误差处于可接受范围内,可以满足实际的工作需求。
3结论
1)设计了一款面向城市内小型复杂草坪环境的草坪维护机器人,阐述了其总体控制系统与平台结构。并且机器人采用模块化的方式实现草坪维护功能,提升了草坪维护的全面化及智能化水平。
2)建立了草坪维护机器人的运动学模型,并对两轮差速驱动模型进行了运动学分析。同时采用了增量式PID控制算法实现速度闭环控制,使机器人能够按照预期行进指令实现精确运动控制。
3)进行了直线行驶与旋转角度测试,验证了增量式PID控制算法的有效性,证明了此运动控制系统具备良好的精确性与稳定性,能够满足机器人在草坪中作业的实际需求,为后续实现草坪的全自动维护工作提供了技术基础。
【参考文献】
[1]HOSSAIN M Z, KOMATSUZAKI M. Weed management and economic analysis of a robotic lawnmower: a case study in a Japanese pear orchard[J]. Agriculture, 2021, 11(2): 113.
[2]LIAO J C, CHEN S H, ZHUANG Z Y, et al. Designing and manufacturing of automatic robotic lawn mower[J]. Processes, 2021, 9(2): 358.
[3]MELITA C D, MUSCATO G, PONCELET M. A simulation environment for an augmented global navigation satellite system assisted autonomous robotic lawn-mower[J]. Journal of Intelligent & Robotic Systems, 2013, 71(2): 127-142.
[4]尹鸿超.基于模糊控制的割草机器人避障系统研究[D].广州:华南农业大学,2018.
YIN H C. Research on obstacle avoidance system of mowing robot based on fuzzy control[D]. Guangzhou: South China Agricultural University, 2018.
[5]CHRISTIANSEN P, KRAGH M, STEEN K A, et al. Platform for evaluating sensors and human detection in autonomous mowing operations[J]. Precision Agriculture, 2017, 18(3): 350-365.
[6]窦汉杰,陈震宇,翟长远,等.果园智能化作业装备自主导航技术研究进展[J/OL].农业机械学报,2024:1-25.(2024-01-18).https://kns.cnki.net/kcms/detail/11.1964.S.20240118.0945.002.html.
DOU H J, CHEN Z Y, ZHAI C Y, et al. Research progress on autonomous navigation technology for orchard intelligent equipment[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2024: 1-25. (2024-01-18). https://kns.cnki.net/kcms/detail/11.1964.S.20240118.0945.002.html
[7]MARTELLONI L, FONTANELLI M, PIERI S, et al. Assessment of the cutting performance of a robot mower using custom built software[J]. Agronomy, 2019, 9(5): 230.
[8]INOUE K, KAIZU Y, IGARASHI S, et al. The development of autonomous navigation and obstacle avoidance for a robotic mower using machine vision technique[J]. IFAC-PapersOnLine, 2019, 52(30): 173-177.
[9]MALAVAZI F B P, GUYONNEAU R, FASQUEL J B, et al. LiDAR-only based navigation algorithm for an autonomous agricultural robot[J]. Computers and Electronics in Agriculture, 2018, 154: 71-79.
[10]化春键,宋一鸣,蒋毅,等.RGB通道增强的草坪杂草识别算法[J/OL].南京农业大学学报,2024:1-11.(2024-02-19). https://kns.cnki.net/kcms/detail/32.1148.S.20240219.1038.004.html.
HUA C J, SONG Y M, JIANG Y, et al. RGB channel enhanced lawn weed recognition algorithm[J/OL]. Journal of Nanjing Agricultural University, 2024:1-11. (2024-02-19). https://kns.cnki.net/kcms/detail/32.1148.S.20240219.1038.004.html.
[11]杨春梅,侯玉宁,刘九庆.基于森林火灾数据的余火清理机器人模块化设计[J].森林工程,2022,38(2):105-111.
YANG C M, HOU Y N, LIU J Q. Modular design of embers clearing robot based on forest fire data[J]. Forest Engineering, 2022, 38(2): 105-111.
[12]SHARIFI M, YOUNG M S, CHEN X Q, et al. Mechatronic design and development of a non-holonomic omnidirectional mobile robot for automation of primary production[J]. Cogent Engineering, 2016, 3(1): 1250431.
[13]LEE K, JUNG C, CHUNG W. Accurate calibration of kinematic parameters for two wheel differential mobile robots[J]. Journal of Mechanical Science and Technology, 2011, 25(6): 1603-1611.
[14]彭高扬.室内智能移动机器人底盘运动控制系统设计与实现[D].长沙:湖南大学,2021.
PENG G Y. Design and implementation of motion control system of indoor intelligent mobile robot[D]. Changsha: Hunan University, 2021.
[15]赵明翰,周郁,赵桂军,等.纵向双轮平衡车滑模控制设计与仿真[J].自动化技术与应用,2022,41(3):7-11,34.
ZHAO M H, ZHOU Y, ZHAO G J, et al. Design and simulation of sliding mode control for longitudinal two wheel balance vehicle[J]. Techniques of Automation and Applications, 2022, 41(3): 7-11, 34.
[16]DUTTA P, NAYAK S K. Grey wolf optimizer based PID controller for speed control of BLDC motor[J]. Journal of Electrical Engineering & Technology, 2021, 16(2): 955-961.
[17]胡亚维.基于单神经元PID的机械手移动路径智能控制方法[J].自动化技术与应用,2022,41(8):5-7,17.
HU Y W. Intelligent control method of manipulator movement path based on single neuron PID[J]. Techniques of Automation and Applications, 2022, 41(8): 5-7, 17.
[18]詹长书,詹鸿飞,李志鹏,等.基于模糊自适应PID控制的气动伺服系统位置控制[J].森林工程,2019,35(6):55-60.
ZHAN C S, ZHAN H F, LI Z P, et al. Position control of pneumatic servo system based on fuzzy adaptive PID control[J]. Forest Engineering, 2019, 35(6): 55-60.
[19]KANAGASINGHAM S, EKPANYAPONG M, CHAIHAN R. Integrating machine vision-based row guidance with GPS and compass-based routing to achieve autonomous navigation for a rice field weeding robot[J]. Precision Agriculture, 2020, 21(4): 831-855.
[20]彭洋,黄青青,刘晋浩,等.联合采育作业精确进料控制系统开发与测试[J].森林工程,2018,34(3):58-62.
PENG Y, HUANG Q Q, LIU J H, et al. Development and test of accurate feed control system for harvester combined operation[J]. Forest Engineering, 2018, 34(3): 58-62.
[21]BALAMURUGAN K, MAHALAKSHMI R. ANFIS-fractional order PID with inspired oppositional optimization based speed controller for brushless DC motor[J]. International Journal of Wavelets, Multiresolution and Information Processing, 2020, 18(1): 1941004.
