基于倾斜摄影的实景三维模型制作优化研究
2024-07-09朱悦阳胡丹丹刘杨
朱悦阳 胡丹丹 刘杨

关键词:无人机;倾斜摄影;空三优化;实景三维模型;精细化模型
0引言
近年来,随着无人机制造技术的迅速发展、相机重量减轻以及相机分辨率不断提升,结合导航定位技术的快速发展,采用倾斜摄影技术进行航空摄影,再利用专业的摄影测量软件对数据进行解算,得到高质量的测绘产品,成为基础测绘地理产品的主要制作方案[1-3]。对于摄影测量影像数据解算而言,其最核心的算法是提取影像的同名点,并完成加密点的平差调整[4]。利用同一款软件进行影像空中三角测量解算,输入工程的影像数据、相机参数和POS数据,直接决定着空三解算成果的可用性。倾斜摄影测量由于获取影像数据的角度大,导致采集的影像分辨率差异大,并且影像畸变也大[5]。以下视POS数据代替侧视相机POS数据,导致输入工程的POS精度低,并且相机参数精度较低,都严重影响了倾斜数据空三解算的精度和通过率[6]。由于倾斜摄影方式采集的影像存在较多盲区,并且目前算法对弱纹理数据解算效果不佳,构建模型过程中算法的局限性,导致模型出现破损、扭曲变形等,影响着模型的整体质量和可用性[7-8]。鉴于上述各种问题,本文对倾斜摄影技术展开深入研究,重点对倾斜影像空三加密解算和模型质量提升进行分析研究,并以实际项目进行验证。通过对多组影像数据的解算对比分析,得到优化后的数据可以提升倾斜影像空三加密解算的通过率和精度;利用模型修饰软件对模型成果进行处理,可以提升模型成果的整体质量和模型地物结构的完整性。本文的研究可以为同行作业人员在倾斜摄影数据解算方面提供参考。
1无人机倾斜摄影测量技术
该技术是指以无人机为飞行平台,以不同角度组合的多个相机为倾斜相机,结合导航和定位技术,在空中对地面进行影像数据采集,并记录相机在空中曝光时的位置和姿态。利用影像之间的关系和共线方程,对数据进行解算,生产得到各种符合测绘精度要求的测绘产品。目前常见的倾斜相机有2镜头、5镜头甚至更多镜头,其中最常见的是5镜头,由4个侧视和1个下视相机组成,且侧视和下视两相机之间的夹角为45度。在航摄作业时,下视相机以垂直的角度采集目标地物顶部数据,侧视相机则以45度的角度采集目标地物侧面数据。相机焦距、像元大小、航摄影像地面分辨率和航摄高度之间存在如式(1)的关系:
其中:a代表像元大小、GSD代表影像地面分辨率、f代表相机焦距,H代表航摄高度。这里的航摄高度实际上指的是相机中心点距离目标地物点的距离。对于倾斜相机来说,这个距离是下视的1.4倍。为了使得获取的影像分辨率尽可能相同,在进行倾斜相机组装时,将侧视相机焦距调整为下视相机焦距的1.4倍,然后固定焦距,完成倾斜相机的组装。
2航摄数据优化处理
航摄成果主要包括影像数据、POS数据和相机参数,利用这三种数据才能完成空三加密数据的解算。因此,需要对这三种数据进行优化,才可以提升倾斜摄影空三加密解算的通过率和精度。
2.1相机参数优化
对于倾斜相机来说,其与地面的夹角较大。目前的相机检校算法已经不能满足倾斜相机参数的准确检校。因此,在获取高精度倾斜相机参数时,都是利用软件自检校的方式。即选取POS数据一致的5个镜头的影像数据,且这部分数据最少包含3个航带,并且选取范围内至少包含4个像控点和1个检查点,像控点分布在选取范围的四周,检查点位于选取范围的中间区域。利用倾斜摄影软件对该部分影像数据进行解算,然后将5个像控点进行转刺,设置中间的1个点为检查点并进行多次迭代的平差调整运算。然后查看平差报告,当像控点和检查点的较差趋于稳定,相机参数不再发生变化时,此时获取的相机参数精度较高,可以作为优化后的相机参数进行后期数据的解算。
2.2POS数据优化
POS是相机曝光时的位置和姿态。目前的倾斜相机,大多数是以下视POS数据来代替侧视相机的POS。对于数据解算而言,准确恢复影像之间的关系,能有效提升影像数据的解算质量。从POS数据出发,以下视相机POS为基准,利用相机之间的安装距离和角度等参数,对侧视相机POS数据进行计算,然后得到准确的侧视相机对应的POS数据。这种方法对人员要求较高,需要懂编程、会开发软件,然后对POS进行优化处理。
还有一种是多软件组合进行POS数据优化。目前倾斜摄影解算软件较多,每个软件的算法都不同。采用不同的软件,可以实现影像数据的低精度解算,得到精度较高的POS数据,且每个相机之间的相对精度也较高。然后将高精度POS数据导入到高精度空三解算软件中,完成高精度空三加密数据的解算。这是目前常用的POS数据优化措施。
2.3影像数据优化
影像数据优化主要是提升影像的质量,减小影像的畸变误差。对于摄影测量而言,只有相机中心点不存在影像畸变,其余区域,随着距离中心点的距离越大,影像畸变差就越大,这种情况不利于数据的高精度解算。利用准确的相机参数,对影像畸变误差进行处理,可以提升影像的整体质量,有利于空三加密的高精度解算。除此之外,采用蒙板技术对影像畸变大的区域进行处理,也可以减小影像整体的畸变影响,得到高精度空三加密成果。采用蒙板进行畸变处理,其主要思路如下:选取一张航摄影像作为蒙板,将影像加载到Photoshop软件中,选中影像边缘部分,对其RGB赋值为(0,0,0),剩余部分RGB统一赋值为(255,255,255),并对蒙板命名为mask.tif,将其放置到影像所在的文件夹下,即可完成蒙板的设置。
3空三加密解算对比
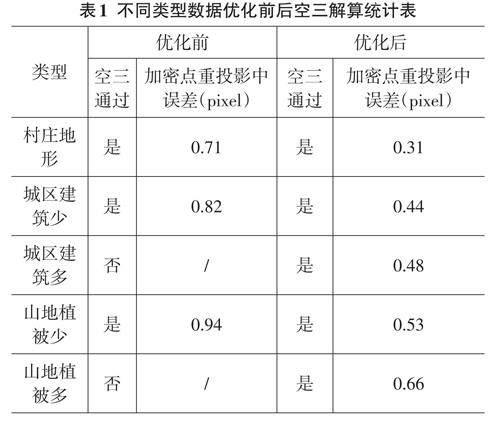
为了验证本文提出的优化措施对影像空三加密解算的影响,笔者采用了不同类型的5组影像数据进行解算,得到的结果见表1。
4实景三维模型制作
实景三维模型的生产主要是基于空三加密成果完成的,在空三成果的基础上,基于多视影像密集匹配技术生产高密度点云数据,利用密集点云数据,按照不规则三角网构网原则进行三角网的构建,得到TIN模型。基于TIN模型中三角网顶点和倾斜影像之间的对应关系,在多张影像中选择最优的影像进行纹理的自动映射,最后按照要求的成果格式进行模型输出。本次对城区建筑多的实验数据进行实景三维模型生产,得到的部分实景三维模型成果如图1所示。
5模型成果问题分析与优化处理
采用人机交互方式对本次生产的模型成果进行查看,发现部分模型窗户不平整,部分建筑物底部扭曲变形,对模型问题展开以下分析,并给出解决措施。
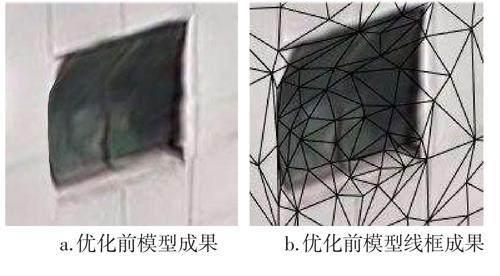
5.1窗户不平整分析及解决措施
模型构建是基于三角网,而三角网是在密集点云的基础上得到的。由于匹配的点云存在误差,因此得到的三维模型中窗户面并不平整,而是凸凹不平的。
针对窗户不平整问题,目前采用的优化处理措施主要有两种,即模型压平和模型重建。模型压平是指将窗户对应的三角网选中,然后选择立面为基准面,将选中的三角网全部压到基准面上,这种方式不需要重新建模,但可能会导致三角网叠加问题,从而在模型成果展示时出现模型闪烁问题。另一种优化措施是直接进行三维模型单体化重建,即利用空三和影像数据,或者基于实景三维模型成果,设置窗户所在的面为基准面,采集窗户的两个顶点,并通过延伸方式得到另外两个顶点,从而构建得到窗户面,形成优化后的模型成果。
5.2建筑底部扭曲变形分析及解决措施
倾斜摄影是从空中对地面进行影像数据采集,因此在建筑物底部会出现航摄盲区。对于空三加密解算而言,其主要是基于影像提取可靠的同名点坐标,而在盲区部分由于缺乏可靠的影像,无法获取准确的同名点数据,从而得不到密集的点云数据。在基于密集点云构建三角网时,由于缺乏点云数据,导致构建的三角网发生扭曲变形问题,从而得到的实景三维模型呈现扭曲变形问题。
从点云入手,采用激光扫描方式获取密集点云数据,以构建结构完整的建筑物模型。在采集点云数据之前,首先在墙的立面上布设像控点,并利用全站仪采集立面像控点的坐标值。随后,利用地面激光扫描设备获取建筑物底部的彩色点云数据,并利用像控点对点云数据进行纠正处理。在与倾斜影像接边的区域,利用公共点对两套成果的精度进行约束,以确保采集的点云数据成果与倾斜摄影得到的点云成果能够完美融合,然后基于这两套点云数据进行三角网的构建。由于彩色点云自带纹理数据,因此直接将彩色点云的纹理映射到模型上,即可完成高质量模型数据的制作。
从三角网入手,采用单体化技术对扭曲变形的建筑物进行模型重建。首先利用OSGB模型或者恢复的立体模型,采集建筑物的顶点和边界线,然后利用拉伸等操作,完成建筑物结构的建模。直接从模型上获取纹理信息,对于纹理映射错误的部分,采用Photo?shop软件进行处理,然后将优化后的纹理重新映射到模型上,从而得到高质量的模型成果。
6优化模型制作
针对窗户不平整问题,采用单体化软件进行模型重建,得到优化前后的窗户模型成果如图2所示。
对扭曲变形的建筑底部模型采用单体化技术进行三维模型重建,并对部分场景成果中的树木进行删除,同时植入模型库中的树木;对模型中的车辆等进行删除,得到优化前后的模型场景成果如图3所示。
7结束语
本文分析了倾斜摄影技术,对倾斜摄影空三解算进行了优化研究,采用不同数据进行了验证,表明优化后的数据可以有效提升空三加密解算成果的通过率和精度。采用建模软件生产实景三维模型,查看并分析了模型存在问题产生的原因,给出解决措施,并对生产的模型进行了优化处理,得到了质量更高的模型成果。本文的研究可以为倾斜摄影数据的高精度空三加密解算和高质量模型生产提供借鉴。
