基于模糊控制的混合动力电动汽车再生制动控制策略研究
2024-07-05丁宇珊宋百玲
丁宇珊 宋百玲


摘 要:科学分析了ECE制动政策法规,为了实现制动力的合理分配,设计模糊控制器,该控制器的输入参数包括制动强度z、电池荷电状态SOC和车速v,而输出参数则是制动能量回收比例系数K。建立了基于模糊控制的制动能量回收控制策略的仿真模型并仿真,结果显示,设计的控制策略可以确保车辆的制动稳定性,并使车辆在制动过程中回收较多能量。
关键词:混合动力汽车 再生制动 ADVISOR 制动力分配 模糊控制
0 前言
再生制动系统能够将汽车自身的驱动能量转化为其他形式能量存储,降低成本[1],合理的控制策略能有效提高能量回收利用率。韩国Sunkyunkwan大学的Yeo等人[2]在混合动力汽车智能算法中应用模糊算法,设计调整方案,并建立了硬件实体模型。文献[3]提出的制动策略是在满足ECE法规要求的基础上以制动强度作为制动力分配的标准创建仿真模型,进行实验,将仿真结果与ADVISOR策略对比,在高速公路工况下,回收效率相仿。本文在进行了相关法规的研究和制动动力学分析的基础上,提出了一种模糊控制器,该控制器以充电电池SOC、制动强度z和车辆时速v作为输入,以制动能量回收比例系数K作为输出。利用电机的制动反馈,调节摩擦制动力和再生制动力的比例,不影响汽车制动稳定性并提高整车制动能量回收利用效率。
1 制动力分析
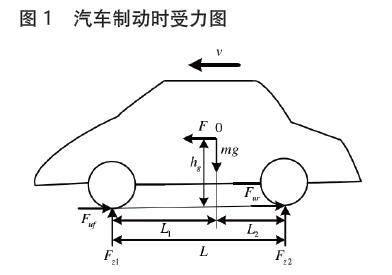
如图1对制动中的汽车进行力学分析[7]时,忽略滚动阻力和影响。车辆保持前后轮同时抱死,才能保证制动时的稳定性[4]。
(1)
公式(1)即为理想制动力分配边界曲线[5](I 曲线)(如图2所示)的表达式。L为前、后车轴之间的距离;为汽车质心高度,m为汽车总质量;hg为重力系数;Fuf为前轴所需制动力;Fur为后轴所需制动力。
在实际行车制动中通常会优先施加较大的制动力于前轮,以使前轮比后轮先抱死状态。即:
(2)
联合国组织欧洲委员会公布了ECE R13汽车安全性制动政策法规[6]。主要规定内容为:
(1)当乘用车地面附着系数φ在0.2~0.8范畴内的路面行驶时,制动强度z≥0.1+0.85(φ-0.2),即φ≤(z+0.07)/0.85时,前轮的地面附着系数曲线处在后轮以上的区域,避免后轮抱死产生侧滑。
(2)当0.3≤z≤0.4时,后轮利用附着系数曲线在直线φ=z+0.05下方的要求也必须满足。
所以ECE制动法规边界曲线(M曲线)(图2所示)表达式为:
(3)
图2中两条线分别为由式(1)所得的I曲线及由公式(3)所得的M曲线,在I曲线和M曲线之间区域内可以确保安全制动。
2 再生制动控制策略
有效的制动力分配范围为图2中的I曲线和M曲线之间[7]。理想制动力分配控制策略能充分利用地面附着系数,提高汽车制动安全性和稳定性,在最短时间内实现汽车制动,具有较高的能量回收率,但协调系数难度较高;最大能量回收控制策略的能量回收率高,但制动稳定性差,控制系统复杂;并联控制策略稳定性较可靠,但回收率低[9]。综上所述,本文选用理想制动力分配控制策略。
理想制动力分配[8]是按图2中的I曲线进行分配。图3为该控制策略的分配曲线,主要分为OA(驾驶员需求制动强度小于0.15)和BC(需求制动强度大于0.15)两段来表示制动力的分配过程。
3 模糊控制器设计
设计了一种模糊控制器来控制混合动力车辆的制动能量回收利用[10]。输入参数为制动强度z、电池荷电状态SOC和车速v,输出参数则是电机制动力与总制动力的比例系数K。原理如图4所示。
3.1 隶属度函数设计
制动强度z,电池SOC数值,车速v,模糊语言皆为低、中、高,模糊子集皆为[L,M,N],论域分别为[0,0.9],[0,1],[0,120],其中L、N为高斯型函数,M为钟型函数[11]。
电机制动比例K的论域为[0,1],模糊子集为[VL、L、M、N、VN],VL表示摩擦制动供给所有制动力,电机不参与;L表示电机供给较少制动力;M表示电机制动是中等水平;N表示主要由电机供给;VN表明几乎所有的制动力由电机供给。
结合模糊控制器结构原理,制定模糊规则如表1所示。
根据模糊规则,四者关系如图5所示。
4 制动能量回收建模与仿真
4.1 制动力分配规则
再生制动时按照整车实况车速查表[12]及计算总制动力所需,根据实况车速分配制动力[13],图6为制定的制动力分配规则。
根据再生控制策略的制动力分配参数,得出各制动力分配系数与车速之间的变化。如图7。
4.2 再生制动模糊控制策略模型
图8所示为理想制动力分配策略和模糊控制策略优化的机电复合制动系统原理框图。
(1)理想制动力分配策略模型
图4中的OA段,BC段分配制动力,仿真模型如图9,10。
(2)再生制动模糊控制策略模型
确定前,后向路径制动强度,依据实际行车状态,构建前,后向再生制动模糊控制策略模型如图11,12所示。
4.3 再生制动控制策略仿真分析
4.3.1 仿真工况
选择NEDC循环工况进行仿真分析。NEDC属于城市工况,汽车启停频次多,制动次数也相对较多,整车车速变化较大[14]。如图13所示为NEDC工况中车速随时间的变化
4.3.2 仿真分析
(1)制动稳定性分析
图14所示为在CYC_ NEDC工况下仿真时车速随时间变化曲线与工况车速要求对比图。
由图14可以看出,车辆能够完全按照仿真工况实时车速要求完成整个仿真过程,说明所设计的控制策略能优化再生制动力比例并保证车辆制动的安全性和稳定性。
(2)再生制动力分配分析
所设计的再生制动控制策略制动与原车再生制动控制策略电机输出转矩对比如图14所示。
图15中,转矩为正,负时分别表示汽车运行在驱动,制动状态。车辆再生制动时,所设计的模糊控制策略下电机转矩的最大值高于软件自带的控制策略,分配到了更多的再生制动力,提高了再生制动力的分配比例,有利于制动能量回收,与设计目标一致。
(3)制动能量回收效果分析
图16为混合动力电动汽车在CYC_ NEDC工况下分别在两种控制策略下仿真的SOS变化曲线对比。由图16可知,所设计的控制策略在仿真过程中SOC值一直要略高于软件自带控制策略模型下的SOC值,有利于提升混合动力汽车的能量利用率,增加续驶里程,符合设计目标。
整车消耗总能量、制动消耗总能量、制动回收能量数据如表2所示。所设计控制策略不仅整车消耗能量略低于软件自带控制策略,同时在制动回收能量方面也略高。在制动能量回收效率上提高了4.3%。
5 结论
(1)对混合动力汽车制动状况进行力学分析,结合ECE制动法规的要求,明确汽车安全制动时制动力范围在I曲线下方且在M曲线上方的区域内。
(2)设计了输入参数为制动强度z、电池荷电状态SOC和车速v,制动能量回收比例系数K为输出的模糊控制器,并根据27个模糊规则来进行制动力分配。
(3)建立模糊控制仿真模型和整车模型,在选定的CYC-NEDC循环工况下对制动稳定性、再生制动力分配状况、制动能量回收效果进行仿真,结果表明基于模糊控制的控制策略能提高制动能量回收的效率,有助于混合动力汽车的续驶里程的提升。有一定的实用性,达到了设计目标。
参考文献
[1]成龙. 混合动力汽车电液集成制动系统设计研究[D].太原:中北大学,2015.
[2]Yeo H, Hwang S, Kim H. Regenerative braking algorithm for a hybrid electric vehiclewith CVT ratio control[J]. Proceedings of the Institution of Mechanical Engineers, PartD: Journal of Automobile Engineering, 2006, 220(11): 1589- 1600.
[3]Zhang H S M Y Z .Regenerative Braking of Electric Vehicles Based on Fuzzy Control Strategy[J].Processes,2023,11(10).
[4]陈松,王剑.基于载荷识别的汽车转向机电制动稳定性控制[J].计算机仿真,2022,39(09).
[5]朱波,陈超,徐益胜,顾家鑫.纯电动汽车再生制动与ESC液压制动协调控制[J].合肥工业大学学报(自然科学版),2020,43(11):1441-1449.
[6]吴兴康.基于ECE R13法规线和I曲线的电动汽车制动能量回收控制策略[D].杭州:浙江科技学院,2021.
[7]季昌健.基于模糊神经网络的电动车再生制动力分配方法研究[D].长春:吉林大学,2020.DOI:10.27162/d.cnki.gjlin.2020.006876.
[8]王静怡,吴涛,吉麒麟.纯电动汽车制动能量回收系统关键技术现状分析[J].时代汽车,2021(03):100-101.
[9]苏楠,宋峰伟,王鹏.电动汽车制动力的分配分析及优化[J].汽车实用技术,2020,45(17).
[10]崔本清.基于模糊控制的电动汽车再生制动能量回收策略的研究[D].桂林:桂林电子科技大学,2021.
[11]高航.纯电动汽车制动能量回收控制策略研究[D].西安:长安大学,2019.
[12]Cheng Q T .Regenerative braking energy recovery control strategy for electric vehicles with battery temperature measurement[J].Journal of Physics: Conference Series,2023,2584(1).
[13]王健,盘朝奉,陈燎,李仲兴,方恩,林俊良.基于模糊规则的电动汽车机电复合制动力分配策略[J].重庆理工大学学报(自然科学),2021,35(09):66-72+82.
[14]Kevin Robinson,Shifei Ye,Yeow Yap,Stan T. Kolaczkowski. Application of a methodology to assess the performance of a full-scale diesel oxidation catalyst during cold and hot start NEDC drive cycles[J]. Chemical Engineering Research and Design,2013,91(7).