基于改进型转矩分配函数的开关磁阻电机转矩与峰值电流优化研究
2024-06-30许爱德孙景浩冷冰杨洋

摘 要:开关磁阻电机(switched reluctance motor,SRM)使用传统的转矩分配函数控制时由于转矩分配函数的开关角度恒定,使其在换相阶段出现较为明显的转矩脉动和较高的峰值电流现象。针对这一现象,提出实时调节开关角度的指数型转矩分配函数的控制方法来降低转矩脉动与相峰值电流。与传统的转矩分配控制进行比较分析,所提算法能够在不同电机转速下抑制转矩脉动和降低SRM定子绕组换相峰值电流,在中低速情况下,实时优化转矩分配函数开关角与重叠角,提高了SRM的运行效率。以一台2.2 kW的12/8开关磁阻电机作为控制对象,建立控制系统仿真模型,通过仿真和实验验证了所提算法的有效性。
关键词:开关磁阻电机;转矩分配函数;开关角度;转矩脉动;峰值电流
DOI:10.15938/j.emc.2024.05.000
中图分类号:TM352文献标志码:A
Optimization of torque and peak current of switched reluctance motor based on improved torque sharing function
XU Aide SUN Jinghao LENG Bing YANG Yang2
(1.College of Information and Science Technology,Dalian Maritime University,Dalian 116026,China;
2.College of Marine Electrical and Engineering,Dalian Maritime University,Dalian 116026,China)
Abstract:Switched reluctance motor (SRM) uses the traditional torque sharing function control, due to the switching angle of the torque sharing function is constant, so that it has more obvious torque ripple and high peak current phenomenon in the commutation stage. In view of this phenomenon, this paper proposes a control method for the exponential torque sharing function that adjusts the switching angle in real time to reduce torque ripple and phase peak current. Compared with the traditional torque sharing control, the proposed algorithm can suppress torque ripple and reduce the commutation peak current of SRM stator winding at different motor speeds, and optimize the switching angle and overlap angle of the torque sharing function in real time under medium and low speeds, which improves the operating efficiency of SRM. A 2.2 kW 12/8 switched reluctance motor is taken as the control object, and the simulation model of the control system is established, and the effectiveness of the proposed algorithm is verified by simulation and experiments.
Keywords:switched reluctance motors; torque sharing function; switch angle; torque ripple; peak current
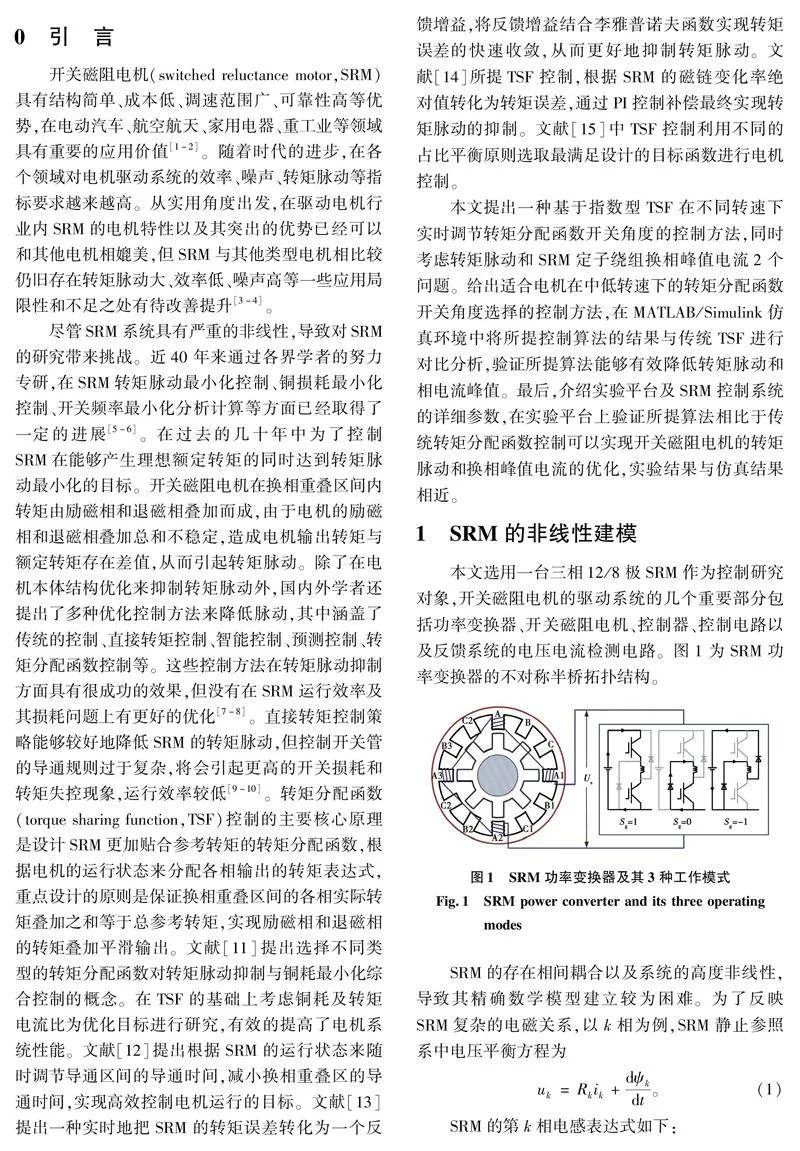
0 引 言
开关磁阻电机具有结构简单、成本低、调速范围广、可靠性高等优势,在电动汽车、航空航天、家用电器、重工业等领域具有重要的应用价值[1-2]。随着时代的进步,在各个领域对电机驱动系统的效率、噪声、转矩脉动等指标要求越来越高。从实用角度出发,在驱动电机行业内SRM的电机特性以及其突出的优势已经可以和其他电机相媲美,但SRM与其他类型电机相比较仍旧存在转矩脉动大、效率低、噪声高等一些应用局限性和不足之处有待改善提升[3-4]。
尽管SRM系统具有严重的非线性,导致对SRM的研究带来挑战。近40年来通过各界学者的努力专研,在SRM转矩脉动最小化控制、铜损耗最小化控制、开关频率最小化分析计算等方面已经取得了一定的进展[5-6]。在过去的几十年中为了控制SRM在能够产生理想额定转矩的同时达到转矩脉动最小化的目标。开关磁阻电机在换相重叠区间内转矩由励磁相和退磁相叠加而成,由于电机的励磁相和退磁相叠加总和不稳定,造成电机输出转矩与额定转矩存在差值,从而引起转矩脉动。除了在电机本体结构优化来抑制转矩脉动外,国内外学者还提出了多种优化控制方法来降低脉动,其中涵盖了传统的控制、直接转矩控制、智能控制、预测控制、转矩分配函数控制等。这些控制方法在转矩脉动抑制方面具有很成功的效果,但没有在SRM运行效率及其损耗问题上有更好的优化[7-8]。直接转矩控制策略能够较好地降低SRM的转矩脉动,但控制开关管的导通规则过于复杂,将会引起更高的开关损耗和转矩失控现象,运行效率较低[9-10]。转矩分配函数(torque sharing function,TSF)控制的主要核心原理是设计SRM更加贴合参考转矩的转矩分配函数,根据电机的运行状态来分配各相输出的转矩表达式,重点设计的原则是保证换相重叠区间的各相实际转矩叠加之和等于总参考转矩,实现励磁相和退磁相的转矩叠加平滑输出。文献[11]提出选择不同类型的转矩分配函数对转矩脉动抑制与铜耗最小化综合控制的概念。在TSF的基础上考虑铜耗及转矩电流比为优化目标进行研究,有效的提高了电机系统性能。文献[12]提出根据SRM的运行状态来随时调节导通区间的导通时间,减小换相重叠区的导通时间,实现高效控制电机运行的目标。文献[13]提出一种实时地把SRM的转矩误差转化为一个反馈增益,将反馈增益结合李雅普诺夫函数实现转矩误差的快速收敛,从而更好地抑制转矩脉动。文献[14]所提TSF控制,根据SRM的磁链变化率绝对值转化为转矩误差,通过PI控制补偿最终实现转矩脉动的抑制。文献[15]中TSF控制利用不同的占比平衡原则选取最满足设计的目标函数进行电机控制。
本文提出一种基于指数型TSF在不同转速下实时调节转矩分配函数开关角度的控制方法。同时考虑转矩脉动和SRM定子绕组换相峰值电流2个问题。给出了适合电机在中低转速下的转矩分配函数开关角度选择的控制方法。在MATLAB/Simulink仿真环境中将所提控制算法的结果与传统TSF进行对比分析,验证了所提算法能够有效降低转矩脉动和相电流峰值。最后,介绍了实验平台及SRM控制系统的详细参数。在实验平台上验证了所提算法相比于传统转矩分配函数控制可以实现开关磁阻电机的转矩脉动和换相峰值电流的优化,实验结果与仿真结果相近。
1 SRM的非线性建模
本文选用一台三相12/8极SRM作为控制研究对象,开关磁阻电机的驱动系统的几个重要部分包括功率变换器、开关磁阻电机、控制器、控制电路以及反馈系统的电压电流检测电路。图1为SRM功率变换器的不对称半桥拓扑结构。
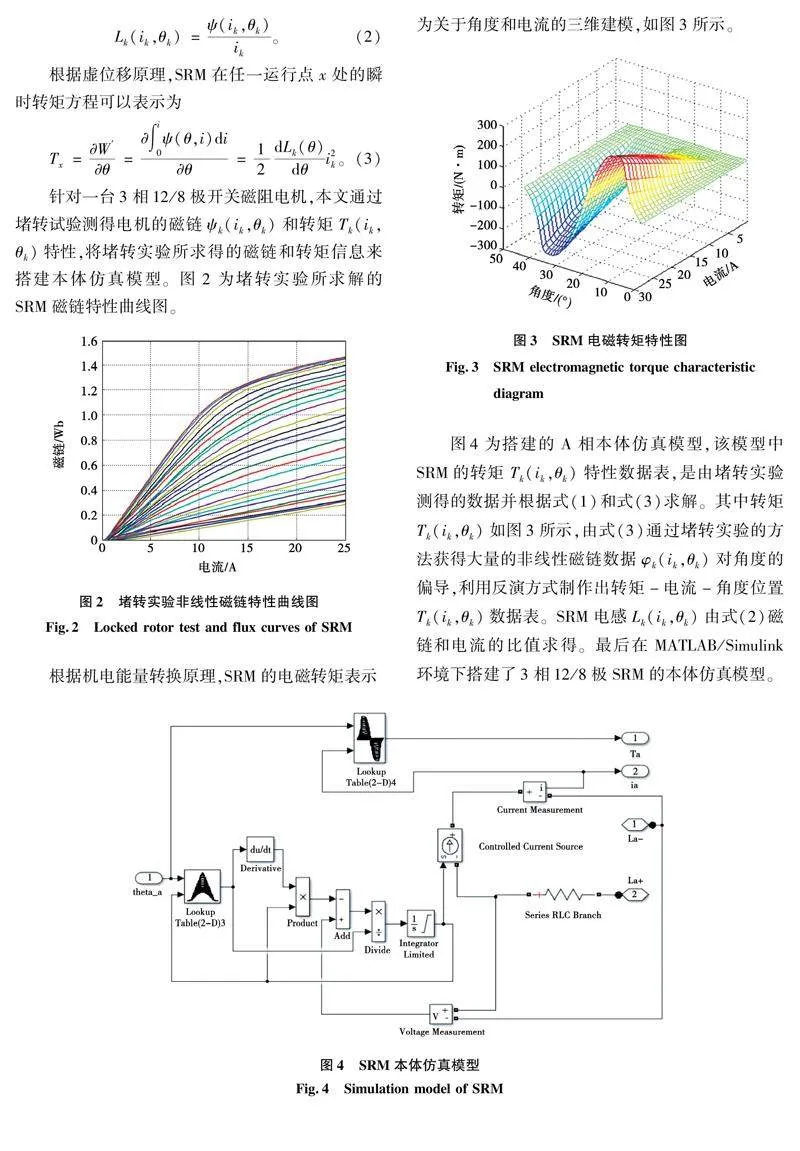
SRM的存在相间耦合以及系统的高度非线性,导致其精确数学模型建立较为困难。为了反映SRM复杂的电磁关系,以k相为例,SRM静止参照系中电压平衡方程如下:
针对一台3相12/8极开关磁阻电机,本文通过堵转试验测得电机的磁链ψk(ik,θk)和转矩Tk(ik,θk)特性,将堵转实验所求得的磁链和转矩信息来搭建本体仿真模型。图2为堵转实验所求解的SRM磁链特性曲线图。
根据机电能量转换原理,SRM的电磁转矩表示为关于角度和电流的三维建模,如图3所示。
图4为搭建的A相本体仿真模型,该模型中SRM的转矩Tk(ik,θk)特性数据表,是由堵转实验测得的数据并根据式(1)和式(3)求解。其中转矩Tk(ik,θk)如图3所示,由式(3)通过堵转实验的方法获得大量的非线性磁链数据φk(ik,θk)对角度的偏导,利用反演方式制作出转矩-电流-角度位置Tk(ik,θk)数据表。SRM电感Lk(ik,θk)由式(2)磁链和电流的比值求得。最后在MATLAB/Simulink环境下搭建了3相12/8极SRM的本体仿真模型。
2 传统的转矩分配函数控制
2.1 传统转矩分配函数的基本原理
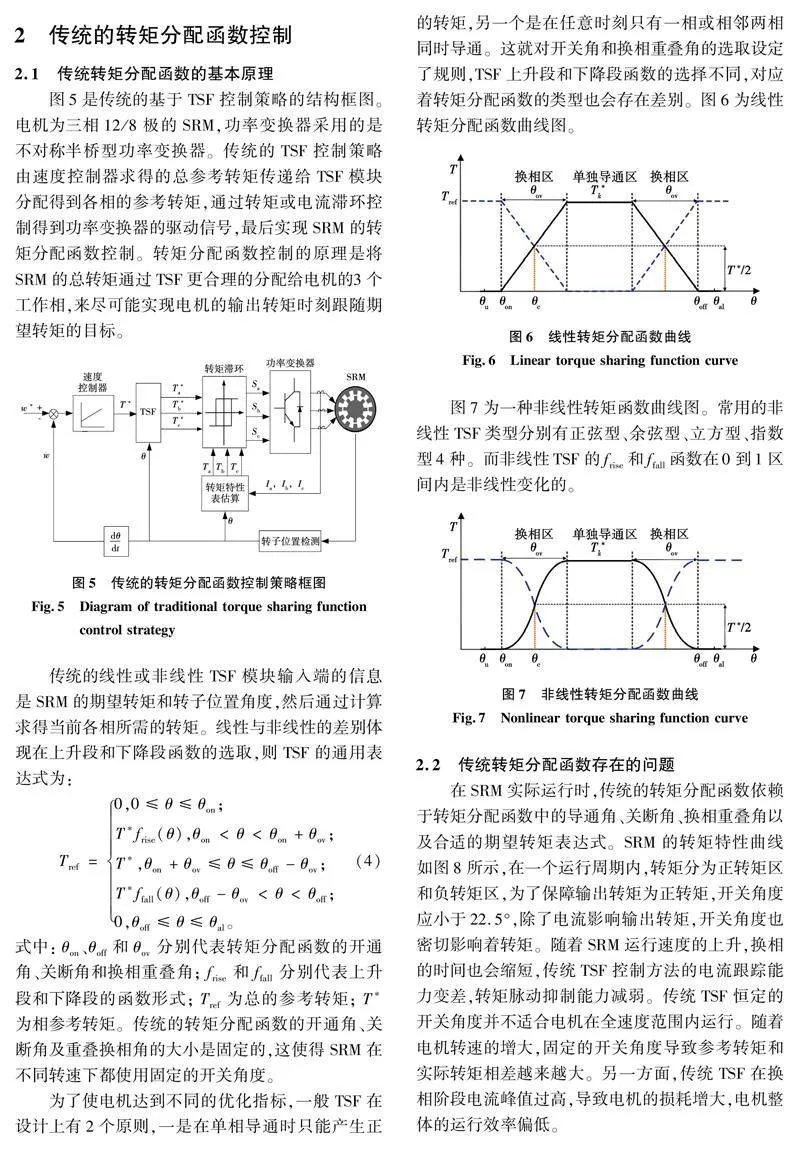
图5是传统的基于TSF控制策略的结构框图。电机为三相12/8极的SRM,功率变换器采用的是不对称半桥型功率变换器。传统的TSF控制策略由速度控制器求得的总参考转矩传递给TSF模块分配得到各相的参考转矩,通过转矩或电流滞环控制得到功率变换器的驱动信号,最后实现SRM的转矩分配函数控制。转矩分配函数控制的原理是将SRM的总转矩通过TSF更合理的分配给电机的3个工作相,来尽可能实现电机的输出转矩时刻跟随期望转矩的目标。
传统的线性或非线性TSF模块输入端的信息是SRM的期望转矩和转子位置角度,然后通过计算求得当前各相所需的转矩。线性与非线性的差别体现在上升段和下降段函数的选取,则TSF的通用表达式为:
式中:θon、θoff和θov分别代表转矩分配函数的开通角、关断角和换相重叠角;frise和ffall分别代表上升段和下降段的函数形式;Tref为总的参考转矩;T*为相参考转矩。传统的转矩分配函数的开通角、关断角及重叠换相角的大小是固定的,这使得SRM在不同转速下都使用固定的开关角度。
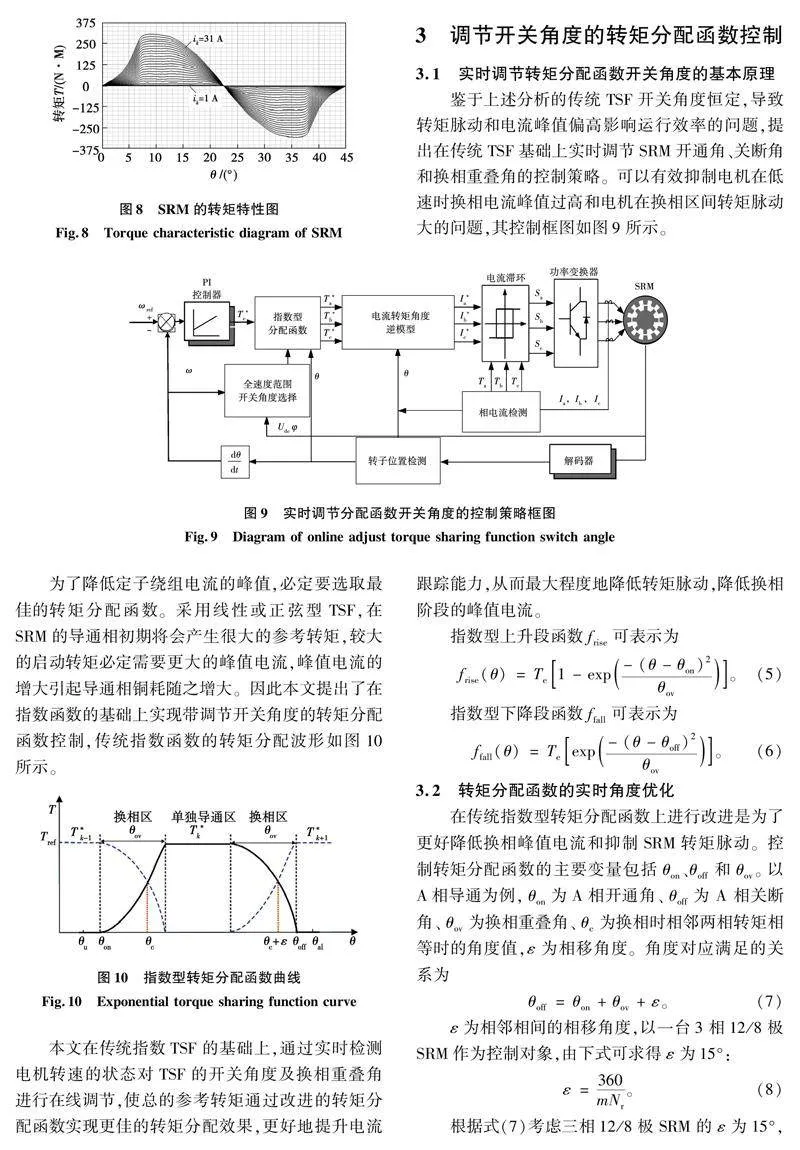
为了使电机达到不同的优化指标,一般TSF在设计上有2个原则,一是在单相导通时只能产生正的转矩,另一个是在任意时刻只有一相或相邻两相同时导通。这就对开关角和换相重叠角的选取设定了规则,TSF上升段和下降段函数的选择不同,对应着转矩分配函数的类型也会存在差别。图6为线性转矩分配函数曲线图。
图7为一种非线性转矩函数曲线图。常用的非线性TSF类型分别有正弦型、余弦型、立方型、指数型4种。而非线性TSF的frise和ffall函数在0到1区间内是非线性变化的。
2.2 传统转矩分配函数存在的问题
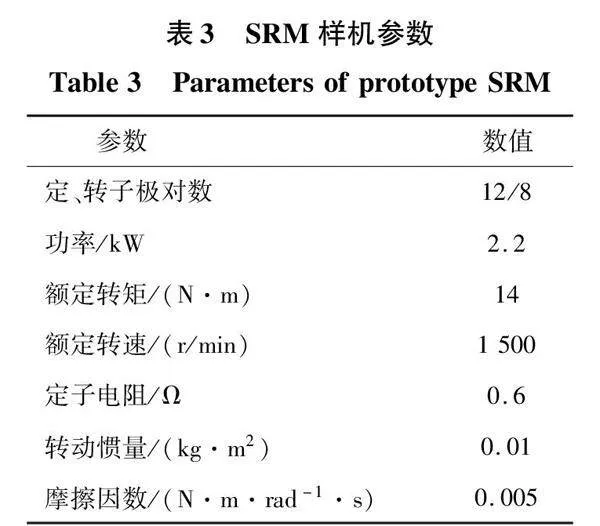
在SRM实际运行时,传统的转矩分配函数依赖于转矩分配函数中的导通角、关断角、换相重叠角以及合适的期望转矩表达式。SRM的转矩特性曲线如图8所示,在一个运行周期内,转矩分为正转矩区和负转矩区,为了保障输出转矩为正转矩,开关角度应小于22.5°,除了电流影响输出转矩,开关角度也密切影响着转矩。随着SRM运行速度的上升,换相的时间也会缩短,传统TSF控制方法的电流跟踪能力变差,转矩脉动抑制能力减弱。传统TSF恒定的开关角度并不适合电机在全速度范围内运行。随着电机转速的增大,固定的开关角度导致参考转矩和实际转矩相差越来越大。另一方面,传统TSF在换相阶段电流峰值过高,导致电机的损耗增大,电机整体的运行效率偏低。
3 调节开关角度的转矩分配函数控制
3.1 实时调节转矩分配函数开关角度的基本原理
鉴于上述分析的传统TSF开关角度恒定,导致转矩脉动和电流峰值偏高影响运行效率的问题,提出在传统TSF基础上实时调节SRM开通角、关断角和换相重叠角的控制策略。可以有效抑制电机在低速时换相电流峰值过高和电机在换相区间转矩脉动大的问题,其控制框图如图9所示。
为了降低定子绕组电流的峰值,必定要选取最佳的转矩分配函数。采用线性或正弦型TSF,在SRM的导通相初期将会产生很大的参考转矩,较大的启动转矩必定需要更大的峰值电流,峰值电流的增大引起导通相铜耗随之增大。因此本文提出了在指数函数的基础上实现带调节开关角度的转矩分配函数控制,传统指数函数的转矩分配波形如图10所示。
本文在传统指数TSF的基础上,通过实时检测电机转速的状态对TSF的开关角度及换相重叠角进行在线调节,使总的参考转矩通过改进的转矩分配函数实现更佳的转矩分配效果,更好地提升电流跟踪能力,从而最大程度地降低转矩脉动,降低换相阶段的峰值电流。
SRM控制过程中,开通角θon一般在相绕组定、转子凸极不对齐位置打开,关断角θoff一般在定、转子凸极接近对齐位置关断。在降低相峰值电流的同时并达到参考转矩的需求,TSF的设计需在产生极大转矩前产生激励电流。SRM在对齐位置时的电流相对较大。当控制激励电流的开通角超前打开时,电机相峰值电流就会越高;在对齐位置后若上一相还存在电流,将会导致负转矩的产生。
如表1所示,参考转矩Tref=5 N·m,电机转速在200 r/min和800 r/min时选择不同的开关角度下2个性能指标数值是不同的,选择最佳开通角度需要通过检测电机的实际运行工况来设定。设置了不同的最佳开通角的筛选条件,有利于分段解决转矩分配函数低转速相电流峰值过高和高转速转矩脉动抑制能力减弱等问题。
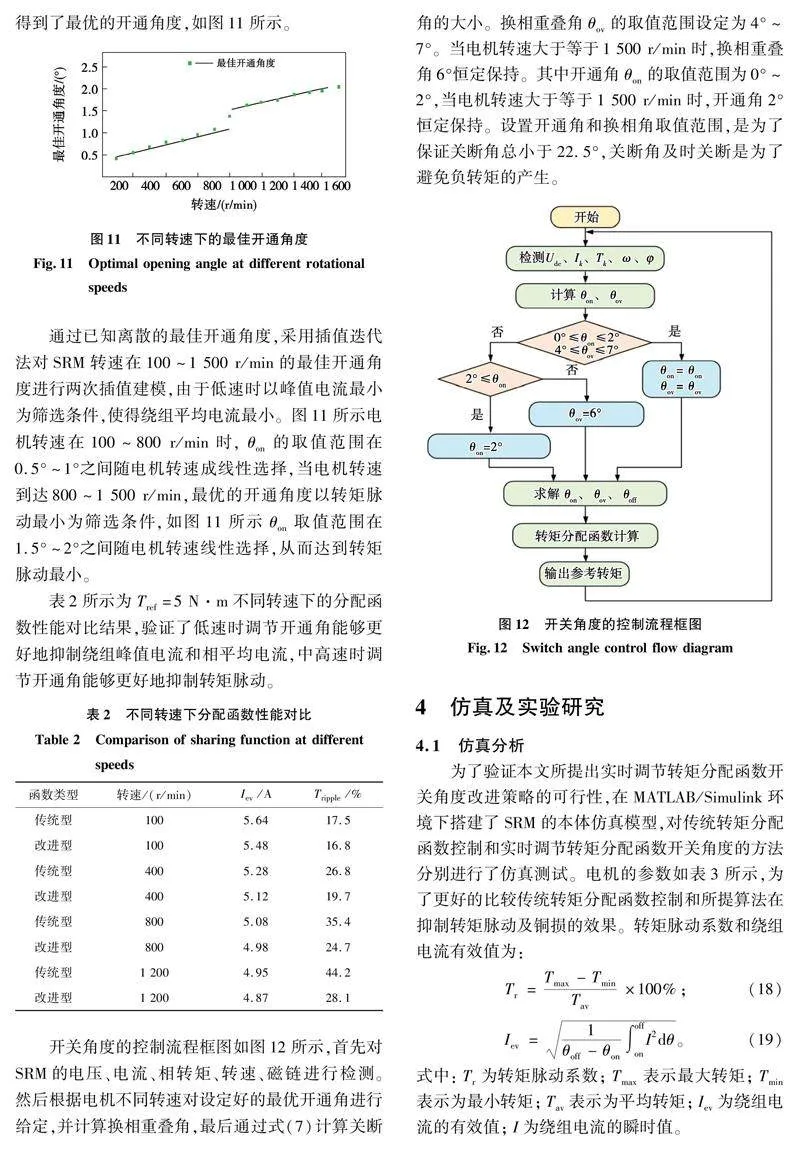
根据SRM不同的转速,设置了TSF开通角度对应的筛选条件,低速时由于峰值电流较高,以峰值电流最小为筛选条件,中高速时由于随着电机运行速度的上升,换相时间缩短,转矩脉动抑制能力减弱,以转矩脉动最小为筛选条件。如图11所示,在不同转速下仿真,得到了最优的开通角度。
通过已知离散的最佳开通角度,采用插值迭代法对SRM转速在100~1 500 r/min的最佳开通角度进行两次插值建模,由于低速时以峰值电流最小为筛选条件,使得绕组平均电流最小。图11所示电机转速在100~800 r/min时,θon的取值范围在0.5°~1°之间随电机转速成线性选择,当电机转速到达800~1 500 r/min,最优的开通角度以转矩脉动最小为筛选条件,如图11所示θon取值范围在1.5°~2°之间随电机转速线性选择,从而达到转矩脉动最小。
如表2所示,为Tref=5 N·m不同转速下的分配函数性能对比结果,验证了低速时调节开通角能够更好地抑制绕组峰值电流和相平均电流,中高速时调节开通角能够更好地抑制转矩脉动。
开关角度的控制流程框图如图12所示,首先对SRM的电压、电流、相转矩、转速、磁链进行检测。然后根据电机不同转速对设定好的最优开通角进行给定,并计算换相重叠角,最后通过式(7)计算关断角的大小。换相重叠角θov的取值范围设定为4°~7°。当电机转速大于等于1 500 r/min时,换相重叠角6°恒定保持。其中开通角θon的取值范围为0°~2°,当电机转速大于等于1 500 r/min时,开通角2°恒定保持。设置开通角和换相角取值范围,是为了保证关断角总小于22.5°,关断角及时关断是为了避免负转矩的产生。
4 仿真及实验研究
4.1 仿真分析
为了验证本文所提出实时调节转矩分配函数开关角度改进策略的可行性,在MATLAB/Simulink环境下搭建了SRM的本体仿真模型,对传统转矩分配函数控制和实时调节转矩分配函数开关角度的方法分别进行了仿真测试。电机的参数如表3所示,为了更好的比较传统转矩分配函数控制和所提算法在抑制转矩脉动及铜损的效果。转矩脉动系数和绕组电流有效值为:
式中:Tr为转矩脉动系数;Tmax表示最大转矩;Tmin表示为最小转矩;Tav表示为平均转矩;Iev为绕组电流的有效值;I为绕组电流的瞬时值。
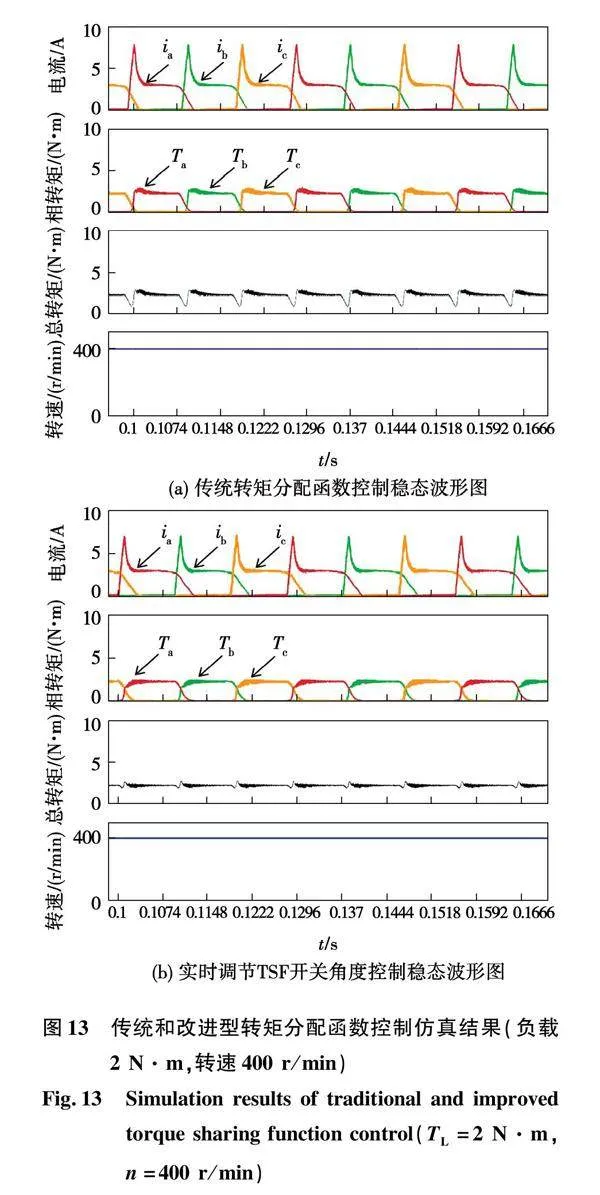
为了对比传统转矩分配函数控制和实时调节转矩分配函数开关角度改进策略在抑制转矩脉动和降低相峰值电流的控制效果,通过仿真验证2种算法在不同转速下的转矩脉动系数和绕组电流有效值。图13为电机转速在低速400 r/min, 参考转矩为Tref=2 N·m的仿真波形图。其中图13(a)为基于传统开关角度恒定的转矩分配控制波形图,其中包括相电流、相转矩、总转矩和电机转速波形。从仿真波形可以看出,传统的TSF在初始的换相阶段由于设定的开通角度较小,导致后一相绕组的相峰值电流快速上升至8.5 A,由于电机转矩特性,相转矩仍然不足够跟踪上其参考值,造成转矩脉动。开关角度恒定情况下的转矩脉动系数为26.4%,绕组电流的有效值4.75 A。图13(b)为实时调节转矩分配函数开关角度控制的仿真波形。实时调节开关角度的转矩分配控制在换相重叠区能有效抑制负转矩的产生,相绕组的相峰值电流为7.2 A,电机的总转矩脉动系数降低到19.5%,绕组电流的有效值降低4.32 A。电机在低速时,改进方法在降低电机转矩脉动的同时也能够更好地降低相峰值电流,降低电机运行时绕组电流有效值,进而提高电机运行效率。
图14为传统和改进型转矩分配函数控制仿真结果,当负载加大到5 N·m,电机转速加大到中速1 000 r/min时,随着SRM转速的升高会导致更大的转矩脉动。如图14(a)所示,随着电机转速提高,此时传统的转矩分配函数控制的转矩脉动系数经过计算可得为43.5% ,相绕组的单相峰值电流为6.8 A,绕组电流的有效值为5.12 A。图14(b)为实时调节转矩分配函数开关角度控制的仿真波形。通过对转矩分配函数开关角度优化选择,电机的总转矩波动降低为25.2%,相绕组的单相峰值电流降为5.8 A,绕组电流的有效值降为5.04 A。电机在中高速运行时,改进的实时调节转矩分配函数开关角度控制能够更好地使电机总转矩波动最小化,有利于电机更平稳地运行。
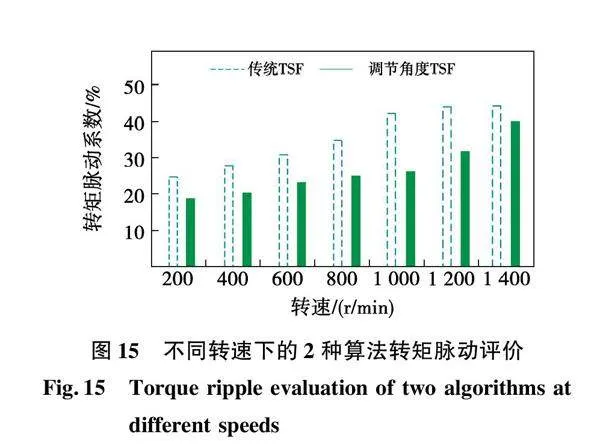
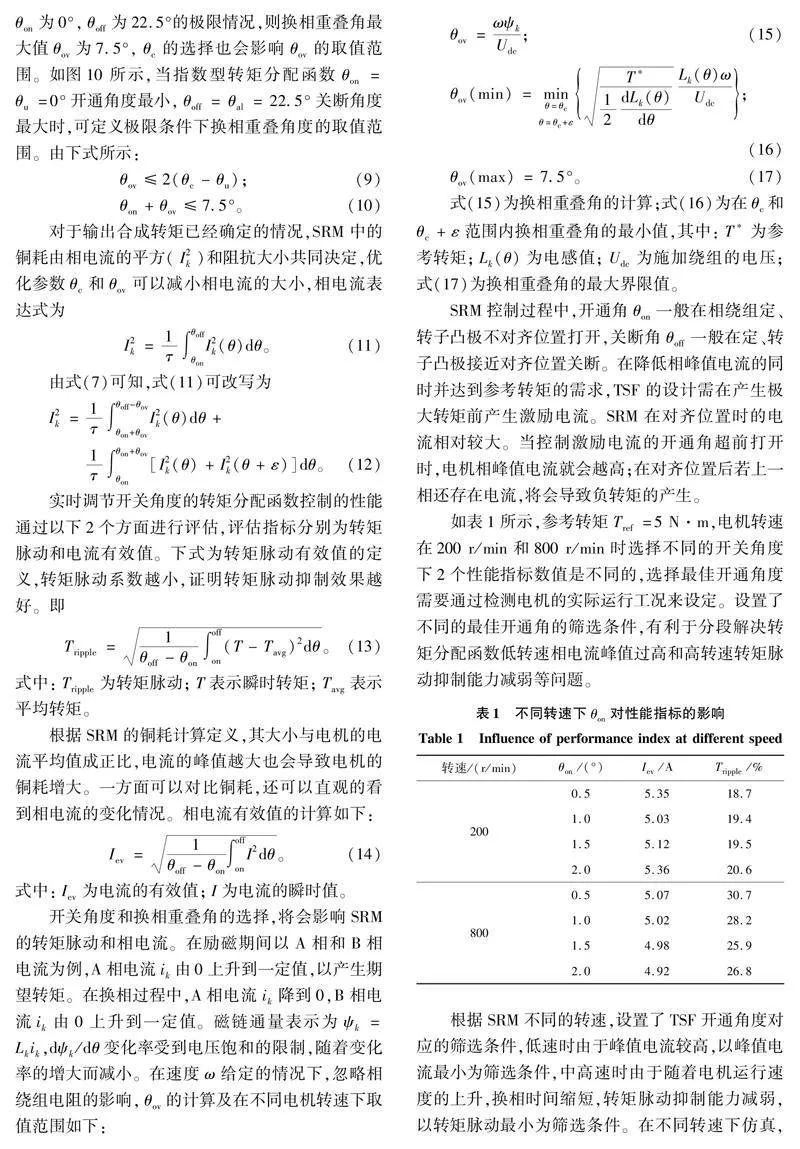
如图15和图16所示,为了验证算法的稳定性,参考转矩恒定5 N·m,电机转速在200~1 400 r/min对传统转矩分配函数控制和实时调节转矩分配函数开关角度控制进行转矩脉动系数和峰值电流评估。结果表明,在中低速情况下,实时优化转矩分配函数开关角控制能够较好地抑制转矩脉动,并降低相绕组峰值电流,从而降低电机铜损,提高电机运行效率。
4.2 实验结果
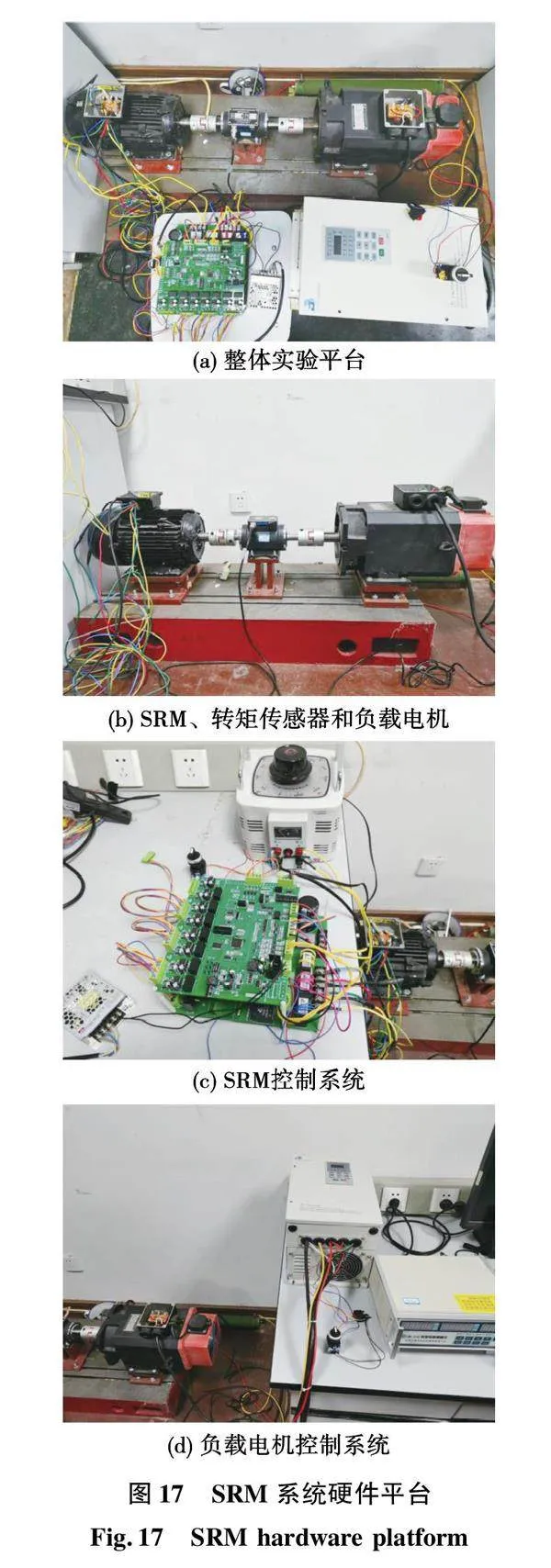
以一台2.2 kW三相12/8极开关磁阻电机为控制对象搭建实验平台进行实验验证。图17为该实验的实验平台,电机参数见表3。
该实验平台主要包括开关磁阻电机及其控制器、转矩传感器和负载异步电机及其控制器。控制器选用TMS320F2812。异步电机作为电机负载,能输出恒定力矩。相电流用电流探头采集,输出转矩用JN338型转矩转速测量仪进行测量,功率变换器采用三相不对称半桥的拓扑结构。
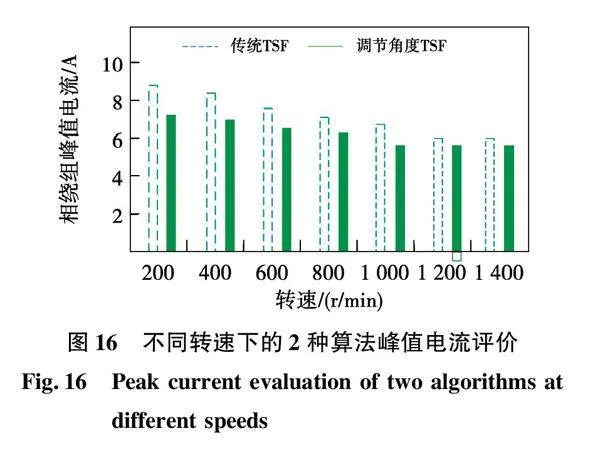
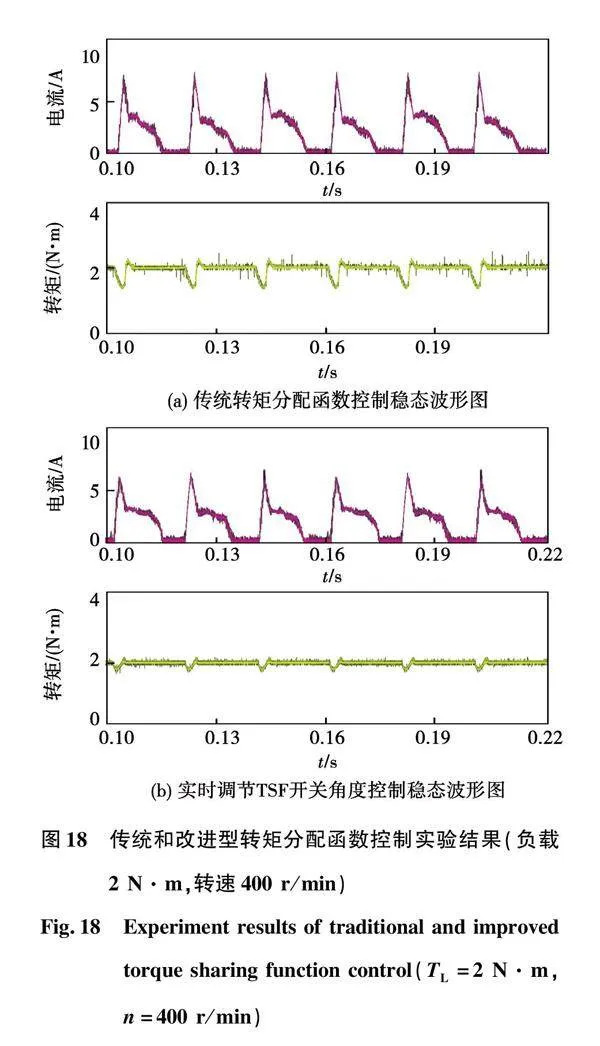
实验分别在传统转矩分配函数控制和实时调节TSF开关角度控制下进行,电机分别运行在400 r/min和1 000 r/min。图18和图19为不同参考转矩和转速下的相电流和电磁转矩波形,实验结果与仿真结果相似,证明了本文所提方法对降低相峰值电流和抑制转矩脉动方面有一定的优化效果。
5 结 论
本文提出一种实时调节转矩分配函数开关角的控制策略来降低开关磁阻电机的转矩脉动和相绕组峰值电流。与传统转矩分配控制相比,该方法在电机不同转速下实时调节转矩分配函数的开关角度。在保证系统稳定性和响应速度的同时,结果表明本文提出的控制策略在中低速能够有效地降低转矩脉动,减小换相期间的电流峰值和相绕组电流有效值,进而减小电机运行的铜耗,提高电机运行效率,证明了所提方法的有效性。同时该方法对电机的参数较为依赖,日后还有很大改进空间。
参 考 文 献:
[1]VUJICIC P V. Minimization of torque ripple and copper losses in switched reluctance drive [J]. IEEE Transactions on Power Electronics, 2012,27(1):388.
[2]许爱德,樊印海,李自强.空间电压矢量下SRM转矩脉动最小化[J]. 电机与控制学报,2010,14(1):35.
XU Aide, FAN Yinhai, LI Ziqiang. SRM torque ripple minimization based on space voltage vector [J]. Electric Machines and Control,2010,14(1):35.
[3]李存贺,王国峰,李岩,等.开关磁阻电机直接自适应神经网络控制[J].电机与控制学报,2018,22(1):29.
LI Cunhe, WANG Guofeng, LI Yan, et al. Direct adaptive neural network control of switched reluctance motors [J]. Electric Machines and Control, 2018,22(1):29.
[4]何昆仑,许爱德,曹玉昭. 基于12扇区的开关磁阻电机直接转矩控制脉动抑制研究[J].电机与控制应用,2016,43(10): 19.
HE Kunlun, XU Aide, CAO Yuzhao. Research of switched reluctance motor direct torque control ripple reduction based on twelve sector division [J]. Electric Machines amp; Control Application,2016,43(10): 19.
[5]夏长亮,王明超,史婷娜,等. 基于神经网络的开关磁阻电机无位置传感器控制[J].中国电机工程学报,2015,25(13):123.
XIA Changliang, WANG Mingchao, SHI Tingna, et al. Position sensorless control for switched relutance motors using neural network [J]. Proceedings of the CSEE, 2015, 25(13):123.
[6]CAI Y, WANG Y, HU H,et al. Research on rotor position model for switched reluctance motor using neural network [J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(6):2762.
[7]GAN C, WU J, YANG S, et al. Phase current reconstruction of switched reluctance motors from DC-Link current under double high-frequency pulses injection [J]. IEEE Transactions on Industrial Electronics,2015,62(5):3262.
[8]GAN C, WU J, SHEN M, et al. Investigation of skewing effects on the vibration reduction of three-phase switched reluctance motors [J]. IEEE Transactions on Magnetics, 2015,63(4):34.
[9]LI Jialing, DING Wen, YUAN Jiangnan, et al. An improved model predictive control method of switched reluctance motor based on direct torque control[J]. IEEE Transactions on Electrical Machines and Systems, 2021, 24(10):2568.
[10]CATATA E H, LUQUE D B, AZCUE-PUMA J L. Direct instantaneous torque control of three phase 6/4 switched reluctance generator operating at low speeds [J]. IEEE Transactions on Electrical Engineering, 2019,10(1109): 1.
[11]孙庆国,吴建华.基于转矩分配函数在线修正的开关磁阻电机转矩脉动抑制策略[J].电机与控制学报,2017,21(12):1.
SUN Qingguo,WU Jianhua. Torque ripple minimization for switched reluctance motors by online modification of torque sharing function[J].Electric Machines and Control,2017,21(12):1.
[12]XUE X D, CHENG K W, HO S L. Optimization and evaluation of torque-sharing functions for torque ripple minimization in switched reluctance motor drives [J]. IEEE Transactions on Power Electronics, 2019,24(9):2076.
[13]SAHOO S K, DASGUPTA S, PANDA S K, et al. A Lyapunov function-based robust direct torque controller for a switched reluctance motor drive system [J]. IEEE Transactions on Power Electronics, 2012,27(2):555.
[14]YE J, BILGIN B. An extended-speed low-ripple torque control of switched reluctance motor drives [J]. IEEE Transactions on Power Electronics,2015,30(3): 1457.
[15]YE J, HENSLEY F. Torque ripple and copper loss minimization for a family of mutually coupled switched reluctance machines [J]. IEEE Transactions on Electronics,2017,10(11):546.
(编辑:刘琳琳)
收稿日期: 2022-09-30
基金项目:国家自然科学基金(51407021);中央高校基本科研业务费(3132015214)
作者简介:许爱德(1974—),女,博士,教授,研究方向为电机与控制;
孙景浩(1997—),男,硕士,研究方向为电机与控制;
冷 冰(1998—),男,硕士,研究方向为开关磁阻电机驱动控制;
杨 洋(1997—),男,硕士,研究方向为电机与控制。
通信作者:许爱德
