双三相永磁同步电动机驱动器全开路故障模式的诊断方法
2024-06-30汤昊岳李伟力陈睿

摘 要:准确地对驱动器开路故障进行识别与诊断能够有效防止故障进一步恶化所引起的严重事故,也是实施恰当容错控制策略的先决条件。驱动器的开路故障类型包含单个功率开关管故障、多个功率开关管故障以及功率开关管和相的混合故障,提出能够识别上述所有类型全开路故障模式的诊断方法。首先,为了便于模拟多类型的故障场景并提高理论模型的计算精度,构建能够计及诸多非理想因素和电机与驱动器之间相互影响关系的直接耦合分析模型,并通过实验验证了该模型的准确性和有效性。其次,通过矢量空间解耦中的子平面电流和绕组相电流分别提取故障因子和辅助故障因子,提出基于2种故障因子的诊断方法,并明晰2种故障因子的阈值范围和使用方法。最后,依托验证后的直接耦合分析模型,对6种不同类别的开路故障进行识别和诊断,证明所提方法的有效性。
关键词:双三相永磁同步电动机;双三相驱动器;耦合建模;开路故障;故障诊断
DOI:10.15938/j.emc.2024.05.000
中图分类号:TM351文献标志码:A
Diagnosis method for full open circuit fault modes in dual three-phase permanent magnet synchronous motor driver
TANG Haoyue, LI Weili, CHEN Rui
(1.School of Electric Engineering, Beijing Jiaotong University, Beijing 100044, China; 2.School of Electric Engineering, China University of Mining and Technology, Xuzhou 221116, China;3.School of Ruixin, Beijing Institute of Technology, Beijing 100081, China)
Abstract:Accurate identification and diagnosis of open-circuit faults in the driver can effectively prevent serious accidents caused by further deterioration of faults and is also a prerequisite for implementing proper fault-tolerant control strategies. The types of open-circuit faults in the driver include the single power switch fault, multiple power switches fault, and mixed fault of power switch and phase. The diagnosis method of fully open-circuit fault modes that can identify all the above types is proposed. Firstly, a direct coupling analysis model was constructed that can consider many non-ideal factors and the interaction between the motor and the driver to facilitate the simulation of multiple fault scenarios and improve calculation precision of the theoretical model, and the accuracy and effectiveness of the model was verified through experiments. Secondly, the fault factors and auxiliary fault factors were extracted from the sub-frame currents in vector space decomposition and winding phase currents, and the diagnosis method based on the two fault factors was proposed, and the threshold range and usage of the two fault factors were clarified. Finally, six different types of open-circuit faults were identified and diagnosed, by relying on the validated direct coupling analysis model, proving the validity of the proposed method.
Keywords:dual three-phase permanent magnet synchronous motor; dual three-phase drive; coupled modeling; open-circuit fault; fault diagnosis
0 引 言
双三相电机通常是指两套三相绕组相位差为30°的六相电机,也被称为不对称六相电机[1]。中性点相互隔离的双三相电机不仅具备出色的容错能力,并且可以借鉴传统三相电机的成熟技术,使其在电动汽车、多电作战平台、高端装备用舵机和执行器等高可靠军民领域中逐渐占据主导地位[2-3]。在实施容错控制之前需要精准的故障诊断步骤,从而能够对故障点进行有效地隔离或正确地补救。相比于电机本体,其驱动器要更加脆弱。根据行业调查表明,功率开关管发生故障的概率占驱动器总故障率的70%,远高于其余部件故障的概率[4-6]。当功率开关管发生短路故障时,通常采取硬件保护措施来强制停止驱动器或将短路故障转化为开路故障。因此,绝大多数的故障诊断方法和容错策略主要针对于驱动器中功率开关管的开路故障[7-16]。
功率开关管的开路故障诊断方法主要分为三类,分别为模型法、智能策略法和信号法。基于模型的诊断方法需要根据电机参数构建相应的状态观测器,并将观测器的估计值与实际的测量值进行比较,进而通过二者之间的偏差来对故障进行判断[7-8]。该方法能够快速且准确地获取故障特征,但是其依赖精确的数学模型和运行参数。电机的电磁参数难免会随着不同的运行工况和环境因素发生变化,这也是模型法的主要局限性。基于智能算法的诊断方法无需了解系统的运行机理,也不依靠电机的控制策略和准确参数,具有强鲁棒性和高辨识度的优点。很多研究利用诸如神经网络、机器学习、模糊逻辑、数据挖掘和专家系统等智能算法对功率开关管的开路故障进行识别[9-12]。虽然基于智能算法的诊断方法能够区分不同种的故障类型并具有较高的诊断精度,但是在实现上过于复杂,并给处理器带来严重的计算负担。
相比于上述2种方法,基于电压或电流信号的诊断方法更受欢迎。电流是闭环系统中必须用到的控制变量,可以避免接入额外的传感器。因此,绝大多数诊断方法是基于绕组电流信号或是谐波子平面电流信号实现的[13-16]。文献[13]定量地给出不同种故障模式下6个绕组相电流归一化后平均值和平均绝对值,并将上述数值做成数据表从而能够识别出54种功率开关管的开路模式。文献[14]将谐波平面电流幅值与基波平面电流幅值相除,利用二者比值定义故障因子,并根据故障因子所在的阈值区间对双三相驱动器的单相和双相开路故障进行识别。文献[15]将缺相故障后的绕组电流表示成正序分量和负序分量的组合,通过负序电流分量的幅值和相位角识别单相和双相开路故障。文献[16]基于故障后基波平面和谐波平面电流的约束关系,对双三相电机的每个相均定义一个独特的故障因子。该方法能够对任意的缺相故障进行识别与定位,但不能识别单个功率晶体管的开路故障。
驱动器的开路故障类型主要分为单管开路、多管开路、功率开关管和相的混合开路。对于双三相电动机而言,其可以根据开路故障的严重程度运行在最小铜耗、最大转矩和单三相的容错模式[17-19]。准确对开路故障类型进行识别和诊断是实施正确容错策略的前提条件。然而,对于双三相电机的驱动系统,目前还没有研究出能够实现任意功率开关管开路、任意相开路以及功率开关管和相的混合开路的故障诊断。针对上述问题,本文以双三相永磁电机为研究对象,提出一种能够识别驱动器全开路故障模式的诊断方法。所提方法同样可以扩展到双三相感应电机中,为双三相电机高可靠的容错运行做出良好的技术铺垫。
驱动器的开路故障会引起过流、高热和强振等负面因素。不同开路故障场景对电机和驱动器的危害程度也不同,直接进行多个类别的开路故障实验很可能烧毁系统,甚至危害人员安全。为了能够真实反映出不同故障场景下电机的运行情况,构建能够计及工程中多种非理想因素的电机与驱动器的直接耦合分析模型,并通过实验对其进行验证。汲取文献[16]中优势,并对该文献中的技术内容进行完善。根据子平面电流和相电流的故障特征,提取故障因子和辅助故障因子,并提出一套故障诊断流程,实现全开路故障模式的识别。基于验证后的直接耦合分析模型,模拟6种开路故障,包括单管、多管、多相以及功率管和相的混合故障,分析2种故障因子的变化趋势,并证明所提方法的有效性。
1 电机与驱动器的直接耦合模型
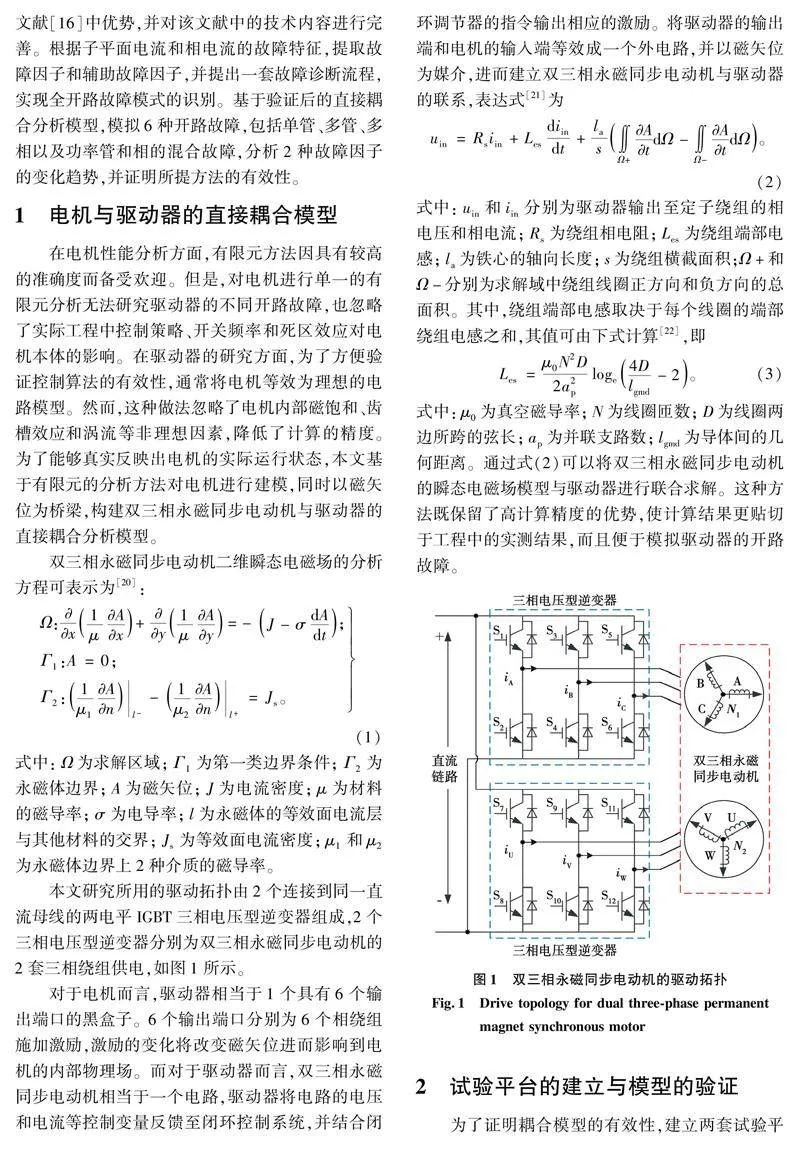
在电机性能分析方面,有限元方法因具有较高的准确度而备受欢迎。但是,对电机进行单一的有限元分析无法研究驱动器的不同开路故障,也忽略了实际工程中控制策略、开关频率和死区效应对电机本体的影响。在驱动器的研究方面,为了方便验证控制算法的有效性,通常将电机等效为理想的电路模型。然而,这种做法忽略了电机内部磁饱和、齿槽效应和涡流等非理想因素,降低了计算的精度。为了能够真实反映出电机的实际运行状态,本文基于有限元的分析方法对电机进行建模,同时以磁矢位为桥梁,构建双三相永磁同步电动机与驱动器的直接耦合分析模型。
式中:μ0为真空磁导率;N为线圈匝数;D为线圈两边所跨的弦长;ap为并联支路数;lgmd为导体间的几何距离。通过式(2)可以将双三相永磁同步电动机的瞬态电磁场模型与驱动器进行联合求解。这种方法既保留了高计算精度的优势,使计算结果更贴切于工程中的实测结果,而且便于模拟驱动器的开路故障。
2 试验平台的建立与模型的验证
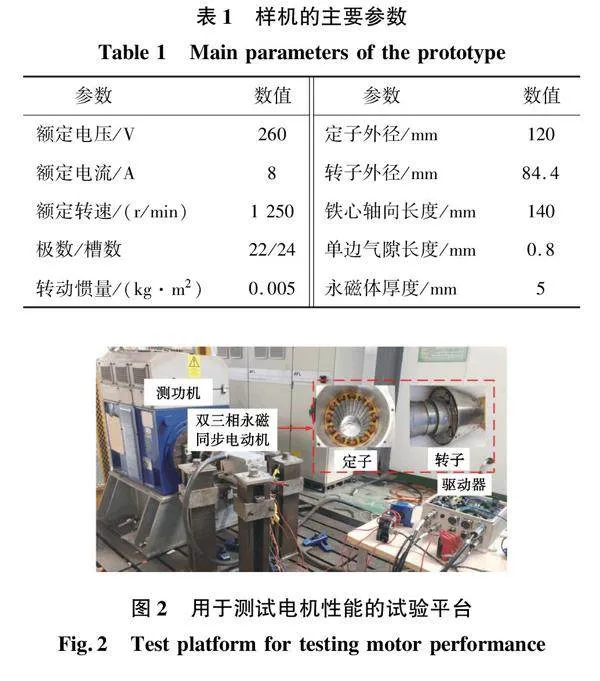
为了证明耦合模型的有效性,建立两套试验平台,从性能、电流波形、子平面电流、转矩-转速等方面进行综合验证。研究所用样机的主要参数如表1所示。第一套试验平台主要由AVL测功机、一台双三相永磁同步电动机和一台驱动器组成,如图2所示。电机与测功机同轴刚性连接,电机的关键性能参数均可从测功机中读取。驱动器由500 V的直流稳压柜供电,其核心是TI公司的数字信号处理器TMS320F28335。驱动器主电路所用IGBT的型号为40N120F12,母线支撑电容由2个电容器串联组成,每个电容器的耐压值和容量值分别为450 V和1 200 μF。
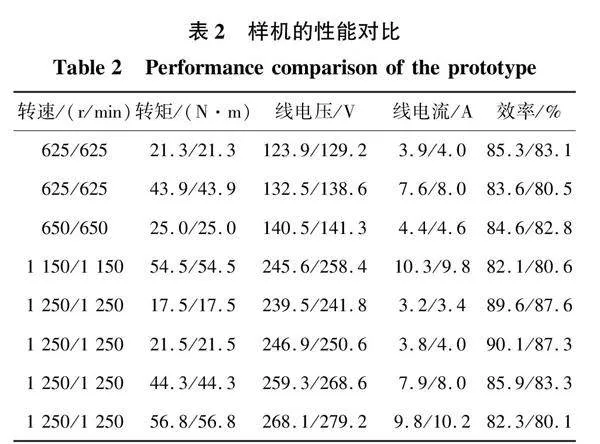
考虑到测功机只能获取电机在三相或六相模式时的运行性能,因此选取六相模式中的8个工作点进行验证。直接耦合分析模型中电机和控制器的参数与试验平台中的完全一致。电机运行在双d-q的控制模式下,控制器的开关频率为8 kHz,死区时间为2.3 μs,电流环的采样频率与开关频率相同,转速环的采样频率为0.8 kHz。表2给出了计算和实测的性能对比。其中:X/Y数据形式中的X代表计算值;Y代表测功机测试值。
由于控制策略是采用转速外环和电流内环的闭环模式,因此在计算中可以精确地给定转速值和转矩值。为了方便对比,给定转速和转矩与实测值相同来分析电机其他运行指标。从表2可以看出,在8种工况下,电压、电流和效率的最大偏差分别为4.4%、4.8%和3.7%。计算精度不仅满足了工程需求,也证明了直接耦合分析模型的正确性。
为了对绕组电流波形、子平面电流和转矩-转速进行直观地对比,建立第二套试验平台,包括电机对拖平台与控制和测试平台,如图3所示。图3(a)中两台样机完全相同,左边作为负载机,右边作为测试机。测试机和负载机通过一台转矩-转速仪同轴刚性连接,负载机工作在发电模式并产生与测试机方向相反的电磁转矩,测试机的转矩和转速会反馈到上位机中。图3(b)中驱动器1和驱动器2分别控制测试机和负载机。测试机的绕组电流由4个钳形电流传感器测量,电流波形在Keysight Technologies制造的数字示波器中显示。上位机能够根据绕组电流的实测值计算出子平面电流。
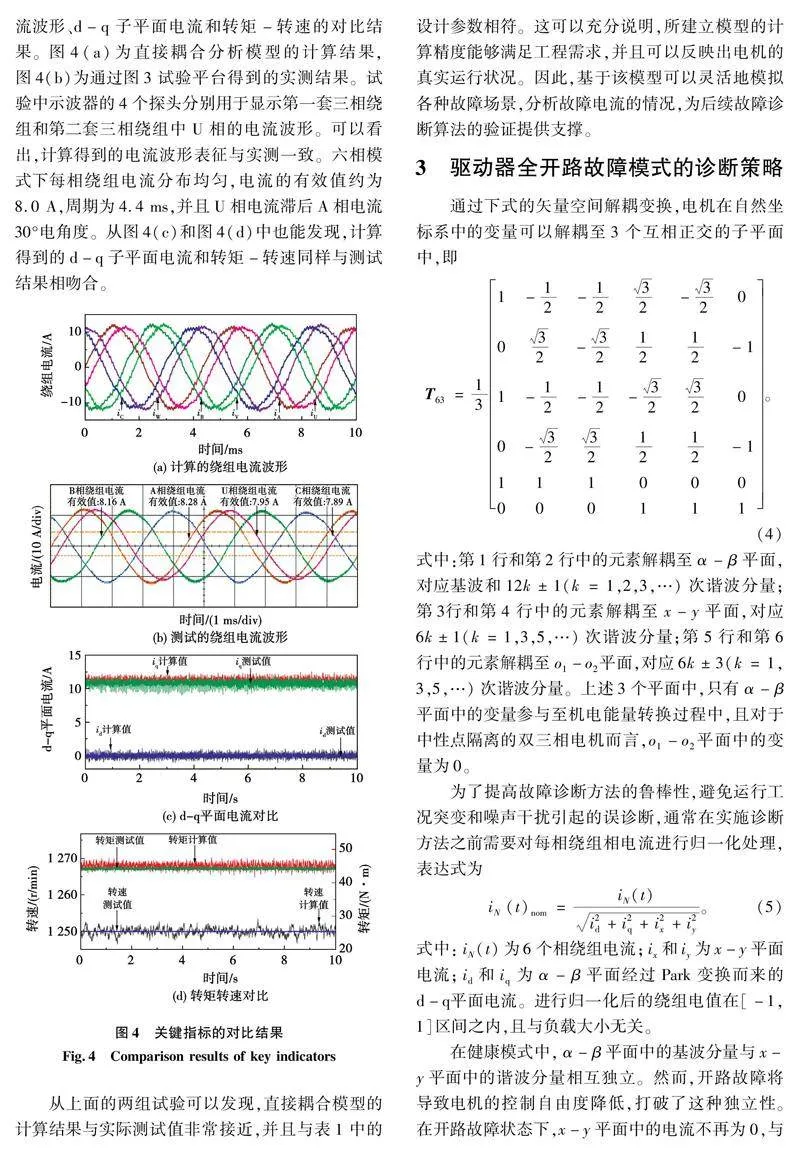
图4给出了电机在额定工况且稳态下的绕组电流波形、d-q子平面电流和转矩-转速的对比结果。图4(a)为直接耦合分析模型的计算结果,图4(b)为通过图3试验平台得到的实测结果。试验中示波器的4个探头分别用于显示第一套三相绕组和第二套三相绕组中U相的电流波形。可以看出,计算得到的电流波形表征与实测一致。六相模式下每相绕组电流分布均匀,电流的有效值约为8.0 A,周期为4.4 ms,并且U相电流滞后A相电流30°电角度。从图4(c)和图4(d)中也能发现,计算得到的d-q子平面电流和转矩-转速同样与测试结果相吻合。
从上面的两组试验可以发现,直接耦合模型的计算结果与实际测试值非常接近,并且与表1中的设计参数相符。这可以充分说明,所建立模型的计算精度能够满足工程需求,并且可以反映出电机的真实运行状况。因此,基于该模型可以灵活地模拟各种故障场景,分析故障电流的情况,为后续故障诊断算法的验证提供支撑。
3 驱动器全开路故障模式的诊断策略
通过下式的矢量空间解耦变换,电机在自然坐标系中的变量可以解耦至3个互相正交的子平面中,即
式中:iN(t)为6个相绕组电流;ix和iy为x-y平面电流;id和iq为α-β平面经过Park变换而来的d-q平面电流。进行归一化后的绕组电值在[-1,1]区间之内,且与负载大小无关。
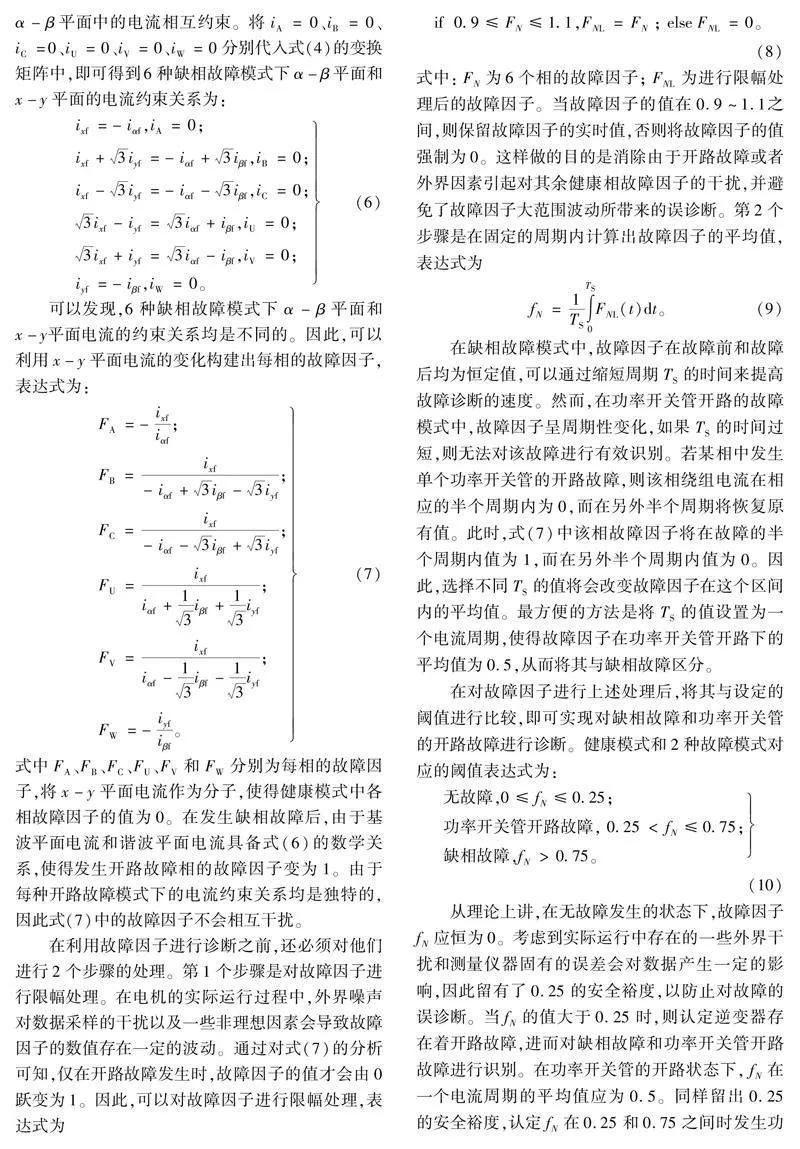
在健康模式中,α-β平面中的基波分量与x-y平面中的谐波分量相互独立。然而,开路故障将导致电机的控制自由度降低,打破了这种独立性。在开路故障状态下,x-y平面中的电流不再为0,与α-β平面中的电流相互约束。将iA=0、iB=0、iC=0、iU=0、iV=0、iW=0分别代入式(4)的变换矩阵中,即可得到6种缺相故障模式下α-β平面和x-y平面的电流约束关系为:
从理论上讲,在无故障发生的状态下,故障因子fN应恒为0。考虑到实际运行中存在的一些外界干扰和测量仪器固有的误差会对数据产生一定的影响,因此留有了0.25的安全裕度,以防止对故障的误诊断。当fN的值大于0.25时,则认定逆变器存在着开路故障,进而对缺相故障和功率开关管开路故障进行识别。在功率开关管的开路状态下,fN在一个电流周期的平均值应为0.5。同样留出0.25的安全裕度,认定fN在0.25和0.75之间时发生功率开关管故障。最后,若fN的值大于0.75,则认定发生缺相故障。
根据式(10)能够对开路故障类型做出准确判断。然而,若要具体定位到故障桥臂的某个功率开关管时,则仅通过故障因子进行辨识将变得非常困难。相比之下,绕组相电流直接包含着功率开关管的故障特征。从开路故障机理中可知,功率开关管的开路故障会导致绕组电流的正半周期或负半周期的值为0。因此,可以引入辅助故障因子dN,通过一个电流周期内绕组电流的极性来定位发生故障的功率开关管,表达式为
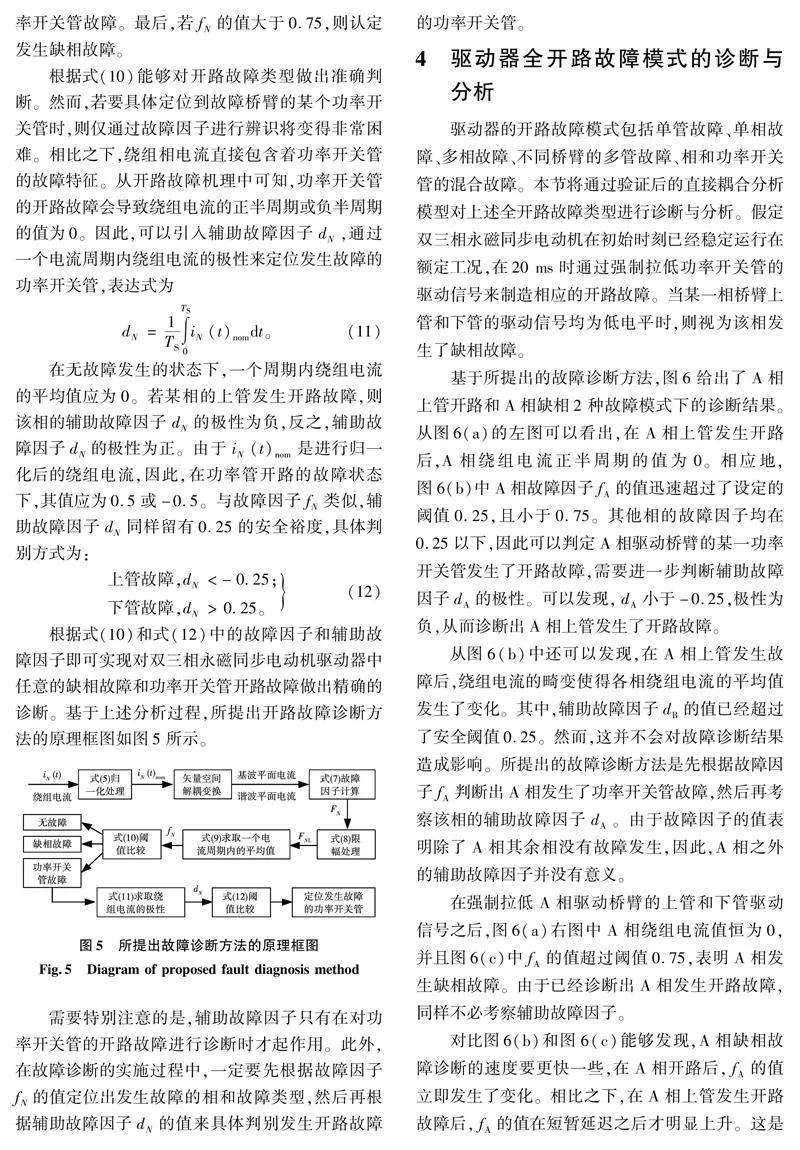
根据式(10)和式(12)中的故障因子和辅助故障因子即可实现对双三相永磁同步电动机驱动器中任意的缺相故障和功率开关管开路故障做出精确的诊断。基于上述分析过程,所提出开路故障诊断方法的原理框图如图5所示。
需要特别注意的是,辅助故障因子只有在对功率开关管的开路故障进行诊断时才起作用。此外,在故障诊断的实施过程中,一定要先根据故障因子fN的值定位出发生故障的相和故障类型,然后再根据辅助故障因子dN的值来具体判别发生开路故障的功率开关管。
4 驱动器全开路故障模式的诊断与分析
驱动器的开路故障模式包括单管故障、单相故障、多相故障、不同桥臂的多管故障、相和功率开关管的混合故障。本节将通过验证后的直接耦合分析模型对上述全开路故障类型进行诊断与分析。假定双三相永磁同步电动机在初始时刻已经稳定运行在额定工况,在20 ms时通过强制拉低功率开关管的驱动信号来制造相应的开路故障。当某一相桥臂上管和下管的驱动信号均为低电平时,则视为该相发生了缺相故障。
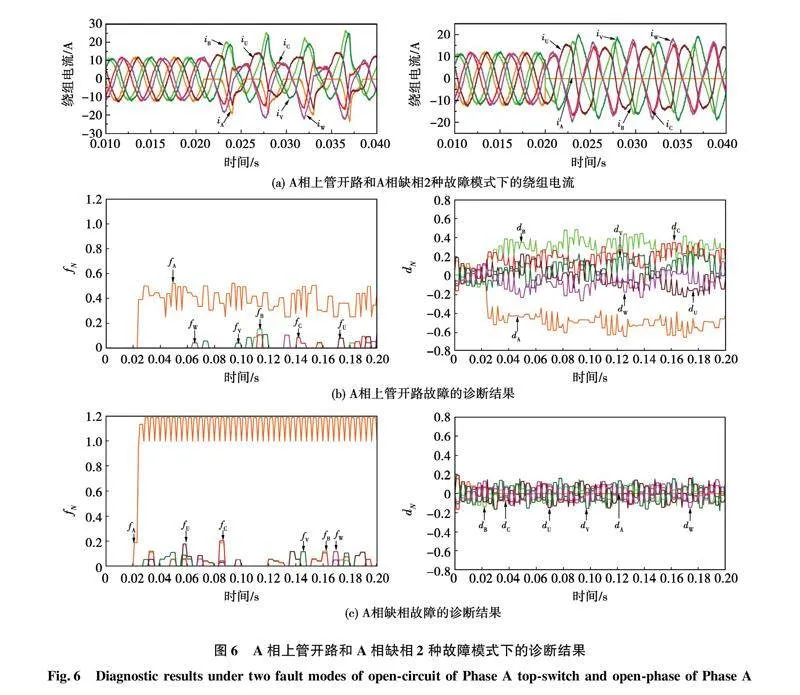
基于所提出的故障诊断方法,图6给出了A相上管开路和A相缺相2种故障模式下的诊断结果。从图6(a)的左图可以看出,在A相上管发生开路后,A相绕组电流正半周期的值为0。相应地,图6(b)中A相故障因子fA的值迅速超过了设定的阈值0.25,且小于0.75。其他相的故障因子均在0.25以下,因此可以判定A相驱动桥臂的某一功率开关管发生了开路故障,需要进一步判断辅助故障因子dA的极性。可以发现,dA小于-0.25,极性为负,从而诊断出A相上管发生了开路故障。
从图6(b)中还可以发现,在A相上管发生故障后,绕组电流的畸变使得各相绕组电流的平均值发生了变化。其中,辅助故障因子dB的值已经超过了安全阈值0.25。然而,这并不会对故障诊断结果造成影响。所提出的故障诊断方法是先根据故障因子fA判断出A相发生了功率开关管故障,然后再考察该相的辅助故障因子dA。由于故障因子的值表明除了A相其余相没有故障发生,因此,A相之外的辅助故障因子并没有意义。
在强制拉低A相驱动桥臂的上管和下管驱动信号之后,图6(a)右图中A相绕组电流值恒为0,并且图6(c)中fA的值超过阈值0.75,表明A相发生缺相故障。由于已经诊断出A相发生开路故障,同样不必考察辅助故障因子。
对比图6(b)和图6(c)能够发现,A相缺相故障诊断的速度要更快一些,在A相开路后,fA的值立即发生了变化。相比之下,在A相上管发生开路故障后,fA的值在短暂延迟之后才明显上升。这是因为,在A相上管发生开路故障的时刻,A相绕组电流处于负半周期,A相上管的故障并不会对电机运行造成影响。当绕组电流从负半周期转换至正半周期时,故障因子才能够识别出A相的故障。
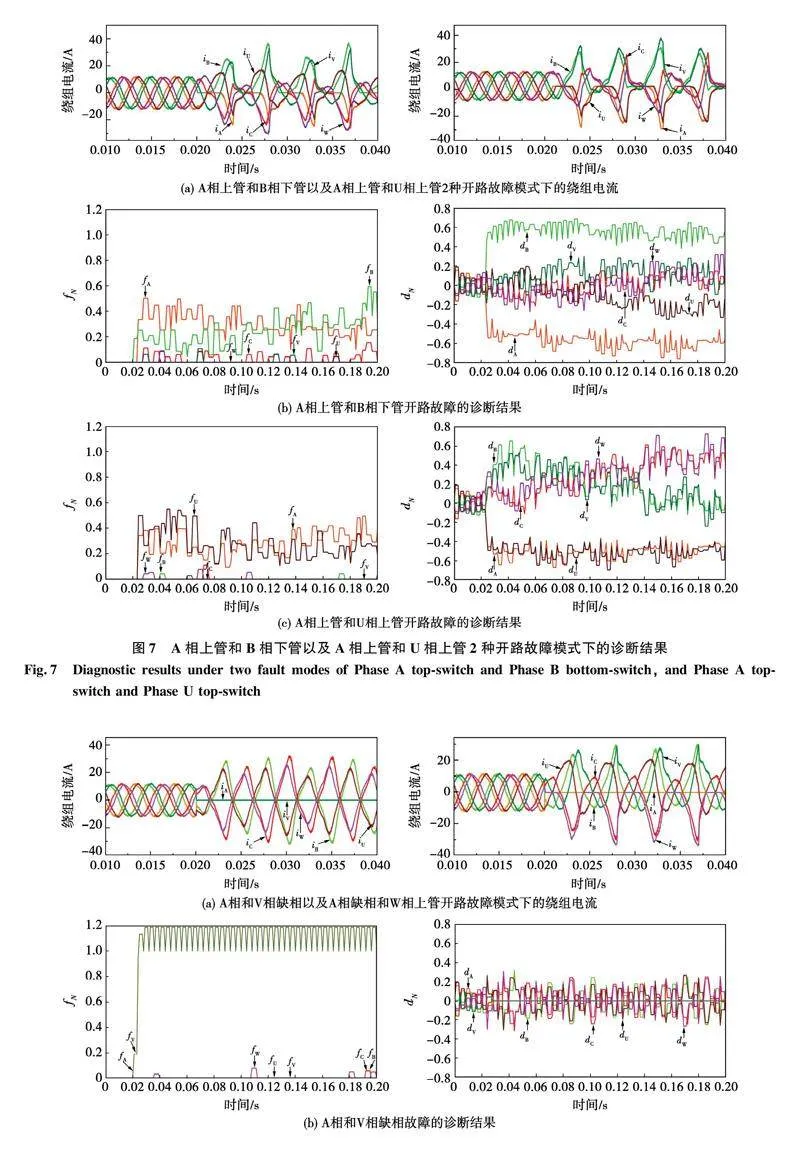
为了验证对多个功率开关管开路故障诊断的有效性,考察同一套三相绕组中的A相上管和B相下管以及不同套三相绕组中的A相上管和U相上管的开路故障,如图7所示。从图7(a)的左图可以发现,在A相上管和B相下管同时发生开路后,A相绕组电流正半周期与B相绕组电流负半周期的值均为0,并且绕组电流的畸变程度相比于单管开路状态也更加严重。
从图7(b)中可以发现,故障因子fA和fB的值在0.25~0.75区间内,表明A相和B相均存在着功率开关管的开路故障。考察辅助故障因子dA和dB的极性可知,dA的极性为负,dB的极性为正,代表A相的上管和B相的下管发生了开路故障。进一步可以看出,由于B相下管发生开路故障时,B相绕组电流刚好位于负半周期,导致fB发生变化的时间要先于fA。
同理,图7(c)中fA和fU大于0.25且小于0.75,表明A相和U相存在着某个功率开关管的开路故障。可以发现,dA和dU的极性均为负,进而能够定位出A相和U相的上管故障。在A相和U相的上管发生开路故障时,A相和U相的绕组电流均处于负半周期。因此,fA和fU在短暂延时之后超过安全阈值。
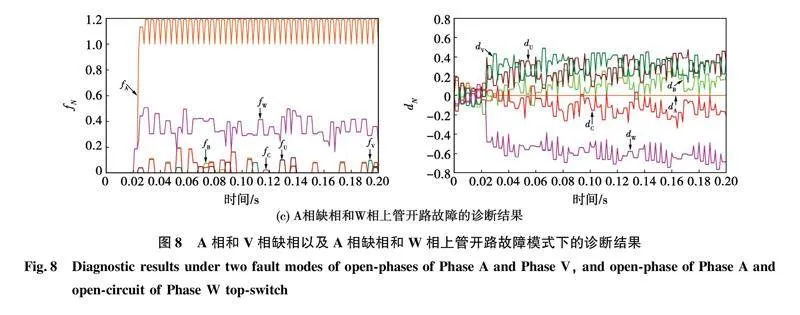
最后,考察多相开路和相与功率开关管混合开路的故障情况。图8给出了A相和V相缺相故障以及A相缺相与W相上管开路混合故障的诊断结果。
图8(a)左图中的A相绕组电流和V相绕组电流在双相开路故障后为0,相应地,图8(b)中故障因子fA和fV的值迅速超过了阈值0.75,表明A相和V相发生了缺相故障。在A相缺相和W相上管开路故障后,图8(a)右图中A相绕组电流为0且W相绕组电流正半周期缺失。同时,故障因子fA超过了阈值0.75,fW超过安全阈值0.25且小于0.75。在此基础上考察辅助故障因子dW,可以发现其极性为负,进而能够对该类混合故障进行准确诊断。
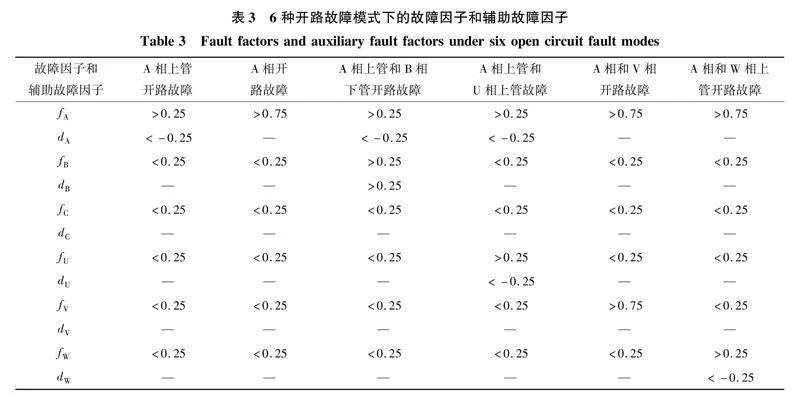
为了便于对比与分析,表3总结了上述6种故障模式下故障因子和辅助故障因子的情况。由于辅助故障因子仅在功率管开路时有效,即0.25lt;fN≤0.75,因此表3中“—”代表无意义的辅助故障因子。从表3中的数据情况可以清晰地分辨出不同类别的故障类型,证明了所提方法的有效性。
5 结 论
驱动器开路故障的精确诊断直接关乎着电机系统运行的可靠性,是多相电机能够容错运行的先决条件。本文提出适用于双三相永磁同步电动机驱动器全开路故障模式的诊断方法。为了能够真实地反映电机和驱动器的运行状态,灵活地模拟各种开路故障模式,构建了电机和驱动器的直接耦合分析模型,并建立两套试验平台对该模型进行充分的验证。根据矢量空间解耦方法中α-β平面与x-y平面电流的约束关系,提取出各相的故障因子,从而能够对相开路和功率开关管开路进行区分。根据绕组相电流的故障特征,提取出各相的辅助故障因子,进而具体定位出发生开路故障的功率开关管。进一步地,提出2种故障因子的结合方法和阈值范围。基于所提出的诊断策略,能够对单管开路、多管开路、多相开路、相与功率开关管混合开路的全开路故障模式进行准确识别。
参 考 文 献:
[1]周长攀,苏健勇,杨贵杰.双三相永磁同步电机全调制比范围空间矢量脉宽调制[J].电工技术学报,2015,30(10):90.
ZHOU Changpan, SU Jianyong, YANG Guijie. The control strategy for dual three-phase PMSM based on normal decoupling transformation under fault condition due to open phases [J].Transactions of China Electrotechnical Society, 2015,30 (10): 90.
[2]郑萍,王勃,吴帆,等.电动汽车用双三相永磁同步电机饱和电感特性分析及计算方法[J].电工技术学报,2013,28(7):19.ZHENG Ping, WANG Bo, WU Fan, et al. Analysis and calculation method of saturated inductance of a dual-three phase permanent-magnet synchronous machine for electric vehicles [J]. Transactions of China Electrotechnical Society, 2013,28(7): 19.
[3]WANG Xueqing, WANG Zheng, XU Zhixian, et al. Comprehensive diagnosis and tolerance strategies for electrical faults and sensor faults in dual three-phase PMSM drives [J]. IEEE Transactions on Power Electronics, 2019, 34(7): 6669.
[4]马铭遥,凌峰,孙雅蓉,等.三相电压型逆变器智能化故障诊断方法综述[J].中国电机工程学报,2020,40(23):7683.MA Mingyao, LING Feng, SUN Yarong, et al. Review of intelligent fault diagnosis methods for three-phase voltage-mode inverters [J]. Proceedings of the CSEE, 2020,40(23): 7683.
[5]HANNA R A, PRABHU S. Medium-voltage adjustable-speed drives-users’ and manufacturers’ experiences [J]. IEEE Transactions on Industry Applications, 1997, 33(6): 1407.
[6]杜嘉晨,樊启高,黄文涛. 基于混合逻辑动态模型的PMSM系统开路故障诊断方法[J].电机与控制学报,2023,27(8):100.
DU Jiachen, FAN Qigao, HUANG Wentao. Open circuit fault diagnosis for PMSM system based on mixed logic dynamic model [J].Electric Machines and Control, 2023,27(8): 100.
[7]GONCALVES P F C, CRUZ S M A, MENDES A M S. Online diagnostic method for the detection of high-resistance connections and open-phase faults in six-phase PMSM drives[J].IEEE Transactions on Industry Applications,2022,58(1):345.
[8]SALEHIFAR M, ARASHLOO R S, MORENO-EGUILAZ M, et al. Observer-based open transistor fault diagnosis and fault-tolerant control of five-phase permanent magnet motor drive for application in electric vehicles[J].IET Power Electronics,2015,8(1):76.
[9]安群涛,孙力,孙立志,等.三相逆变器开关管故障诊断方法研究进展[J].电工技术学报,2011,26(4):135.AN Quntao, SUN Li, SUN Lizhi, et al. Recent developments of fault diagnosis methods for switches in three-phase inverters[J].Transactions of China Electrotechnical Society,2011,26(4):135.
[10]王霞霞,陈超波,高嵩.逆变器开关管故障诊断方法综述[J].计算机测量与控制, 2019, 27(8): 1.WANG Xiaxia, CHEN Chaobo, GAO Song. Overview of fault diagnosis methods for inverter switch tubes [J]. Computer Measurement and Control, 2019, 27(8): 1.
[11]YAN Hao, XU Yongxiang, CAI Feiyang, et al. PWM-VSI fault diagnosis for a PMSM drive based on the fuzzy logic approach[J].IEEE Transactions on Power Electronics,2019,34(1):759.
[12]张昊宇,姚钢,殷志柱,等.基于小波神经网络与KNN机器学习算法的六相永磁同步电机故障态势感知方法[J].电测与仪表, 2019, 56(2): 1.ZHANG Haoyu, YAO Gang, YIN Zhizhu, et al. Fault situation perception method for six phase permanent magnet synchronous motor based on wavelet neural network and KNN machine learning algorithm[J].Electrical Measurement and Instrumentation, 2019, 56(2): 1.
[13]MESAI-AHMED H, JLASSI I, CARDOSO A J M, et al. Multiple open-circuit faults diagnosis in six-phase induction motor drives using stator current analysis [J]. IEEE Transactions on Power Electronics, 2022, 37(6): 7275.
[14]GARCIA-ENTRAMBASAGUAS P, GONZLEZ-PRIETO I, DURAN M J. Single-index open-phase fault detection method for six-phase electric drives [J]. IEEE Transactions on Industrial Electronics, 2020, 67(12): 10233.
[15]LI Wenlong, SONG Pengzhao, LI Qiang, et al. Open-phase fault modeling for dual three-phase PMSM using vector space decomposition and negative sequence components [J]. IEEE Transactions on Magnetics, 2022, 58(8): 1.
[16]DURAN M J, GONZALEZ-PRIETO I, RIOS-GARCIA N, et al. A simple, fast, and robust open-phase fault detection technique for six-phase induction motor drives [J]. IEEE Transactions on Power Electronics, 2018, 33(1): 547.
[17]石鹏川,王学庆,贺明智,等. 双三相永磁同步电机驱动系统简易容错控制方法研究[J].电机与控制学报,2023,27(12):117.
SHI Pengchuan, WANG Xueqing, HE Mingzhi, et al. Simple fault-tolerant control of dual three phase PMSM drives [J]. Electric Machines and Control, 2023,27 (12): 117.
[18]TANG Haoyue, DI Jun, WU Zhigang, et al. Temperature analysis for the asymmetric six-phase permanent magnet synchronous motor in healthy and fault-tolerant modes [J]. IEEE Transactions on Industrial Electronics, 2023, 70(7): 6482.
[19]MUNIM W N W A, DURAN M J, CHE H S, et al. A unified analysis of the fault tolerance capability in six-phase induction motor drives [J]. IEEE Transactions on Power Electronics, 2017, 32(10): 7824.
[20]TANG Haoyue, LI Weili, LI Jingyang, et al. Calculation and analysis of the electromagnetic field and temperature field of the PMSM based on fault-tolerant control of four-leg inverters [J]. IEEE Transactions on Energy Conversion,2020,35(4): 2141.
[21]TANG Haoyue, LI Weili, WU Zhigang. Influence of inverter open circuit fault on multiple physical quantities in the PMSM[J].IEEE Transactions on Power Electronics,2023,38(1):901.
[22]SHIN K H, CHO H W, LEE S H, et al. Armature reaction field and inductance calculations for a permanent magnet linear synchronous machine based on subdomain model [J]. IEEE Transactions on Magnetics, 2017, 53(6): 1.
(编辑:邱赫男)
收稿日期: 2023-06-02
基金项目:北京市自然科学基金(3232050)
作者简介:汤昊岳(1993—),男,博士,讲师,硕士生导师,研究方向为多相永磁电机的多物理场及控制技术;
李伟力(1962—),男,博士,教授,博士生导师,研究方向为电机综合物理场和特种电机理论设计;
陈 睿(2004—),女,学士,研究方向为特种电机技术。
通信作者:李伟力
