一种电机直驱操动机构行程曲线规划方法
2024-06-30王潇吴旭升肖曦

摘 要:电机直驱操动机构过控制电机按照行程曲线运行,直接驱动高压开关实现分合闸动作。针对电机直驱操动机构行程曲线缺乏系统性规划方法,无法与机构运行特性相匹配,规划、验证及优化周期长,可移植性差等问题,结合多项式模型与负载特性模型提出一种电机直驱操动机构行程曲线规划方法。根据运动学和动力学分析,建立电机直驱操动机构负载特性数学模型。利用多项式模型生成行程曲线簇,并结合电机直驱操动机构及高压开关特性建立多目标优化算法,筛选出最佳行程曲线。仿真和实验结果表明,所提方案可以实现电机直驱操动机构及高压开关的稳定、可靠运行,与传统的行程曲线规划方法相比,可以实现10.3%的能耗优化,能够进一步提升控制系统整体功率密度。
关键词:高压开关;操动机构;电机;行程曲线;曲线规划;多项式模型
DOI:10.15938/j.emc.2024.05.000
中图分类号:TP13文献标志码:A
A kind of motor direct-drive operating mechanism travel curve planning method
WANG Xiao WU Xusheng XIAO Xi2
(1.School of Electric and Engineering, Naval University of Engineering, Wuhan 430034, China; 2.Department of Electrical Engineering, Tsinghua University, Beijing 100084, China)
Abstract:The motor direct-drive operating mechanism directly drives the high-voltage circuit breaker to realize the opening and closing actions by controlling the motor to run according to the travel curve. Aiming at the lack of a systematic planning method for the travel curve of the direct-drive operating mechanism, which cannot match the operating characteristics of the mechanism, has a long planning, validation and optimization period, and has poor portability, a travel curve planning method for the direct-drive operating mechanism is proposed by combining the polynomial model and the load characteristic model. Based on the kinematics and dynamics analysis, a mathematical model of the load characteristics of the direct-drive operating mechanism is established. The polynomial model is used to generate travel curve clusters, and a multi-objective optimization algorithm is established by combining the characteristics of the motor direct-drive operating mechanism and the high-voltage circuit breaker to screen out the optimal travel curves. Simulation and experimental results show that the proposed scheme can achieve stable and reliable operation of the motor direct-drive operating mechanism and high-voltage circuit breaker, and compared with the traditional travel curve planning method, it can optimize the energy consumption by 10.3%, which can further improve the overall power density of the control system.
Keywords:high-voltage circuit breaker; operating mechanism; motor; travel curve; curve planning; polynomial modeling
0 引 言
电机直驱操动机构是一种采用电机作为驱动源的新型操动机构,具有传动架构简单、零部件少、实时性强、数字化程度高等特点,结合伺服技术高动态响应、高控制精度等特点,进一步提升了高压断路器的动态性能[1-3]。
在高压断路器发展的不同时期,操动机构的形式也有所不同。永磁操动机构通过改变磁场方向及大小实现分合闸操作,分合闸速度快,零部件数量少。利用永磁体提供磁力,使断路器维持在分合闸位置的可靠性大大提高,但动作过程中速度可控性差[4-5]。弹簧操动机构依靠弹簧实现断路器的分合闸操作,完全依赖于机械结构,具有大量零部件,传动结构复杂且故障率高,出力特性与断路器的负载特性匹配性差[5-6]。液压操动机构利用液压油作为传动介质,工作时无需直流电源,分合闸动作快、操动力大且过程较为平稳,但结构复杂,零部件加工精度要求很高[7-8]。电机直驱操动机构利用数字控制技术与电力电子技术实现电机的跟踪与控制,不仅满足断路器的开关速度与时间要求,在性能和功能方面也有许多优点,如启动时间短、速度可控性高等[5,9-11]。
伺服系统能够实现被控对象对控制指令的快速、准确跟踪[12-15],将伺服控制技术应用于电机直驱操动机构,通过控制电机按照预定行程曲线运行,经传动机构带动高压断路器动触头完成分合闸操作[16-17]。行程曲线规划需要综合考虑断路器运行特性、传动机构及操动机构性能等多方面因素,在一台套电机直驱高压断路器设备中,操动机构行程曲线与高压断路器动触头运行轨迹存在确定的映射关系,行程轨迹的优劣直接影响高压断路器的运行稳定性、可靠性及使用寿命[8-9,18]。因电机直驱操动机构行程曲线规划关联因素多、涉及方面广,且尚无较为完备的系统性方法,导致实际工程中需要花费大量的人力及实验成本,以获取实验数据对行程曲线进行迭代优化。
针对电机直驱操动机构行程曲线规划问题,文献[19]提出一种采用分段求解,逐段拼接的方法进行曲线设计,整体设计思路清晰,但运算量大,且分段数量以及拟合曲线阶次等关键参数均需人工经验干预。文献[20]结合负载几何模型,选择断路器动触头作为轨迹设计出发点,反向推演电机运行曲线,方法较为简单,但缺少足够的约束条件,容易得出冗余解,甚至无效解。
本文提出一种基于多项式模型及多目标优化的行程曲线规划方法,采用多项式模型生成可行域内的行程曲线簇,基于电机直驱操动机构及断路器运行指标构建多目标优化算法,筛选出最佳行程曲线,以实现在给定约束情况下,减少轨迹规划计算量,提高轨迹规划的效率,实现电机直驱操动机构的稳定、可靠运行。
1 电机直驱操动机构负载数学模型
1.1 电机直驱操动机构
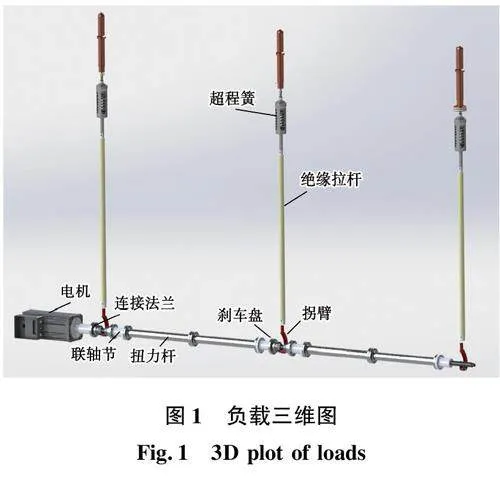
电机直驱操动机构负载如图1所示,负载主要由传动机构和开关本体2个部分构成,传动机构包含联轴节、连接法兰、扭力杆及刹车盘,开关本体包含超程簧、动触头、静触头等。开关动作由与联轴节相连的电机带动,从远离联轴节的方向看,顺时针为分闸方向,逆时针为合闸方向。
1.2 负载建模
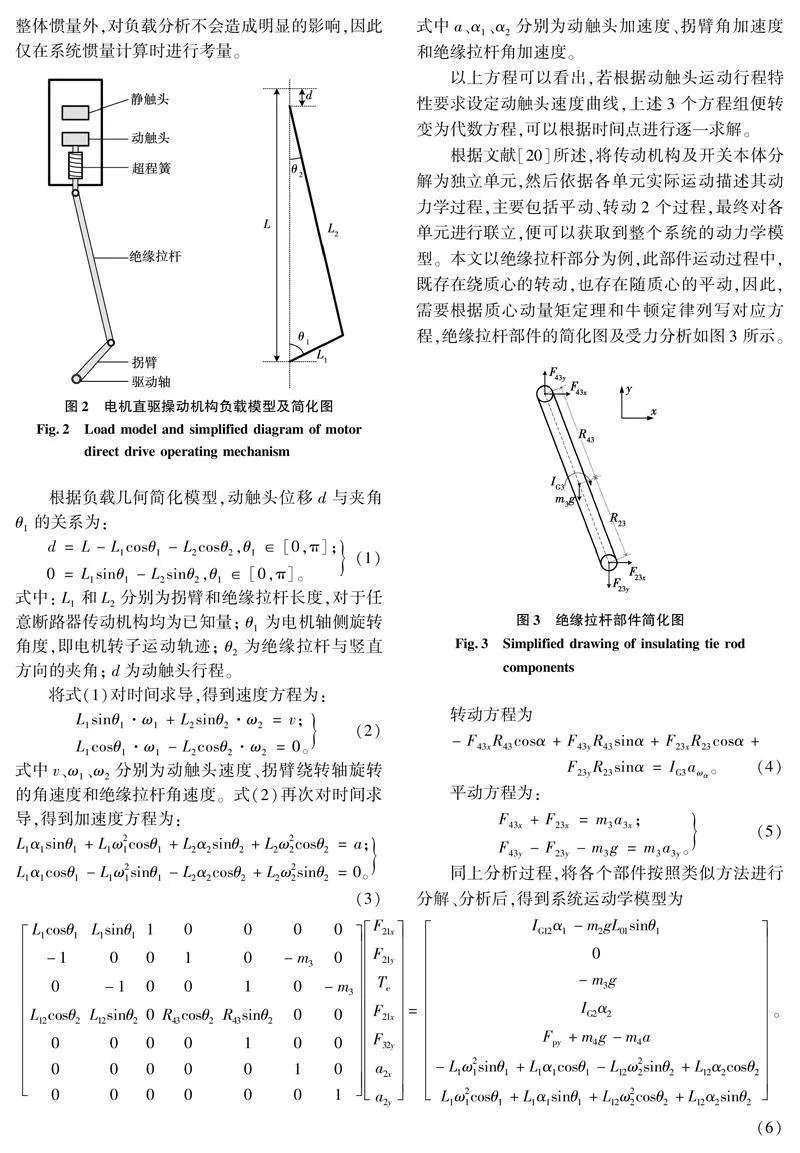
根据文献[20]所述负载建模方法,结合实验平台参数,构建负载特性模型。实验平台负载简化模型如图2所示,图中主要部件为拐臂、绝缘拉杆、超程簧以及动触头,因联轴节、连接法兰、扭力杆、刹车盘等部件仅参与水平方向的旋转运动,除影响系统整体惯量外,对负载分析不会造成明显的影响,因此仅在系统惯量计算时进行考量。
式中转矩Te为待解变量。在一台套样机电机直驱高压断路器系统中,除速度参数外均为已知量,因此,仅需要代入不同的电机行程曲线,即可得到不同电机行程曲线下的转矩需求,进一步辅助系统分析。
2 行程曲线规划方法
电机直驱高压断路器电机行程曲线规划算法,需要从全局行程曲线规划器输入期望运行轨迹和速度信息,从状态感知模块获取电机直驱操动机构及断路器本体状态信息。根据这些信息得到最优行程曲线,提供操动机构控制器,控制断路器运行。
2.1 行程曲线规划
将曲线规划分为纵向行程曲线规划以及横向行程曲线规划2个阶段,曲线规划初始阶段,考虑横向行程曲线为匀速运动,定义纵向轨迹的起点和终点信息集合为:
式中:S0和Se为起点和终点相对于参考位置的纵向位移;t0和te为起点和终点时刻;sv(t)为纵向位移随时间变化的函数。同时,为获得更加平滑的运动过程,采用五次多项式来优化加速度变化率[21],因此,纵向轨迹以五次多项式来描述为
式中α0~α5为待定系数,可由电机运动曲线的起点和终点的纵向位置、速度和加速度信息求解得出。起点信息集合S0为已知量,终点信息集合Se为未知量,定义电机曲线运行时长为
为了减小行程曲线簇生成及筛选的计算量,考虑断路器运行实际情况,令曲线终点的纵向速度与加速度为0,则终点的纵向位置信息集合Se简化为
考虑行程曲线的横向速度保持匀速,可以得到横向行程曲线表达式为
其中sh(t0)为电机运行起始时刻的横向位置。
将纵向和横向行程曲线表达式联立,得到行程曲线簇,每条行程曲线的变量集合表示为
根据电机直驱操动机构以及断路器实际工况设定行程曲线纵向取值范围sv(te)∈[min smotor,max smotor]。假定电机运行时间取值范围[min Tt,max Tt]及采样时间间隔ΔTt,得到曲线运行过程的取值集合。遍历纵向曲线取值和运行时间取值集合对应的组合,便可以生成每个组合对应的行程曲线簇。
2.2 行程曲线筛选
对生成的行程曲线簇设计多目标优化算法,以得到符合期望的行程曲线。
1)约束条件。
为了保证断路器运行安全,提升灭弧室触头电寿命,需要对断路器运行过程中的关键指标(如动触头平均速度、灭弧时间以及稳定性)进行限定,但本文行程曲线规划的应用对象为驱动电机,需要将以上负载侧关键指标通过负载模型(式(1)~式(3)、式(6))转化到电机侧,实现约束映射。
①动触头平均速度。
动触头平均速度vave的定义为动触头在刚分点后固定距离内的平均速度值,以一台126 kV断路器样机为例,动触头平均速度指动触头在刚分点后20 mm内的平均速度值,该值应为3.3±0.5 m/s。该约束条件经负载模型转化后为
式中:ωr_ave为指定区间的转子角速度平均值;ωr_ave_ref_max和ωr_ave_ref_min分别为指定区间的转子角速度平均值的参考值最大值和最小值。
②灭弧时间。
对包含平均速度定义区间的更大范围内的运行时间有如下约束:
式中:tope为指定动触头运动区间的实际运行时间;tope_set为指定动触头运动区间的设定运动时间。
③稳定性。
稳定性是指在现有驱动电机及驱动器情况下,以负载动力学模型作为虚拟被控对象,以转矩为待求解量,将经式(14)和式(15)筛选后的曲线簇代入式(6),求解出对应曲线运行过程中的电机转矩信息。根据电机设计容量,电机运行曲线所需最大转矩应不大于电机设计转矩容量,即
式中n为总的符合条件的曲线数量。
利用所提出的多目标优化算法,根据实际经验以及曲线目标重要性,设定不同的代价函数权重,并遍历可行行程曲线簇中的每一条曲线,选择总代价函数最小的曲线作为最佳曲线。
2.3 行程曲线规划原理
根据以上分析,现给出本文所提行程曲线规划方法流程图,如图4所示。
首先,根据负载运动学及动力学特征建立负载模型;其次,利用传感设备获取系统初始信息,并行程初始信息集合;然后,利用本文所提多项式模型进行曲线规划,此时会生成多条行程曲线;最后,以速度平稳性、曲线效率以及转矩需求为目标,设计代价函数,对上一步生成的多条行程曲线进行寻优,得到最佳行程曲线。
3 仿真分析
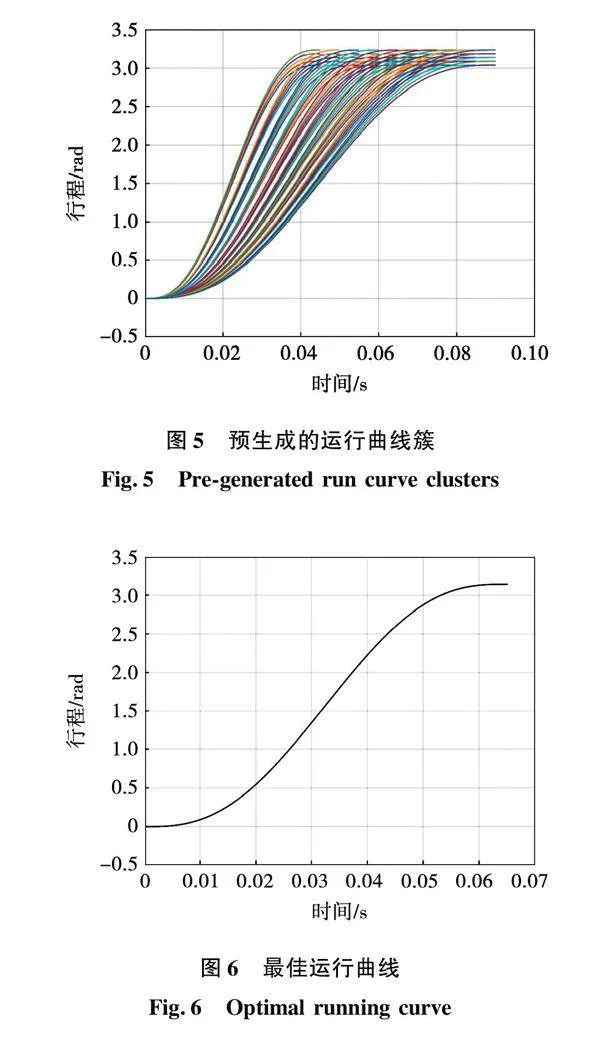
仿真模型采用一台126 kV断路器,超程为20 mm,开距为55 mm,断路器处于合闸位,定义合闸位对应电机机械角度为0,因分闸位设计有锁止机构,因此分闸位对应电机机械角度为3.04~3.24 rad。分闸过程时间取值范围为0.045~0.09 s,采样间隔为0.005 s,分闸位机械角度采样间隔为0.05 rad,横向保持匀速运动,得到不同分闸过程时间的行程曲线簇,如图5所示。
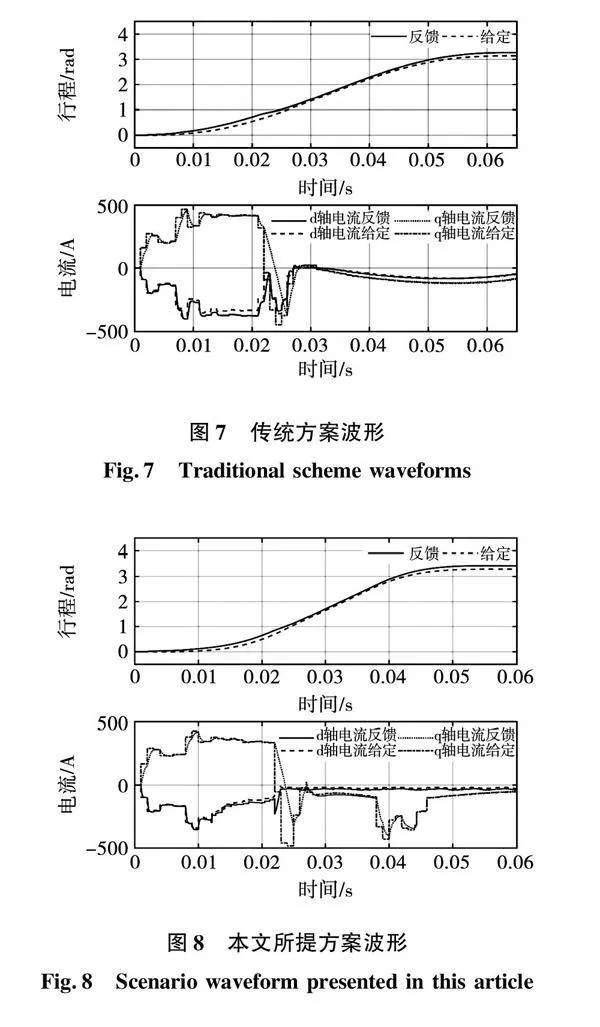
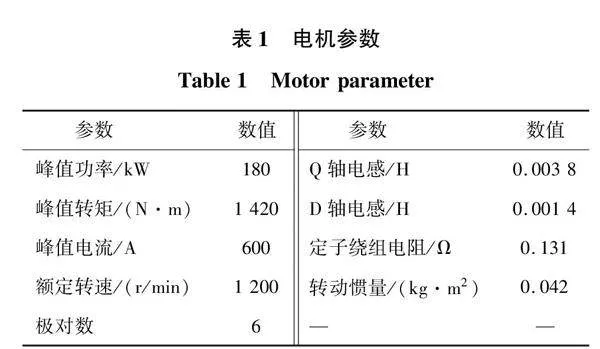
对行程曲线簇利用式(14)~式(20)进行多目标优化,筛选出最佳行程曲线,如图6所示。分别采用上述最佳运行曲线和传统方案曲线,结合系统模型进行仿真分析,电机参数如表1所示,对比行程和dq轴电流波形,图7和图8分别为采用传统方案和所提方案作为输入指令情况下行程和dq轴电流波形。与传统方法相比,在保持行程曲线跟踪基本保持相同的情况下,本文所提方案在刚分点前后(0.01~0.02 s)电流需求更少,实际电流能够更加快速跟踪给定,同时制动时间点有所提前,使得动作过程末端行程更为平缓,能够在一定程度上减小机械碰撞,降低机械噪声。制动时间点的提前,导致制动过程中q轴电流的波动,虽降低了电流的平稳性,但能够使动作过程末端制动更快,分闸过程整体时间更短,整体动作时间至少缩短5 ms。
4 实验分析
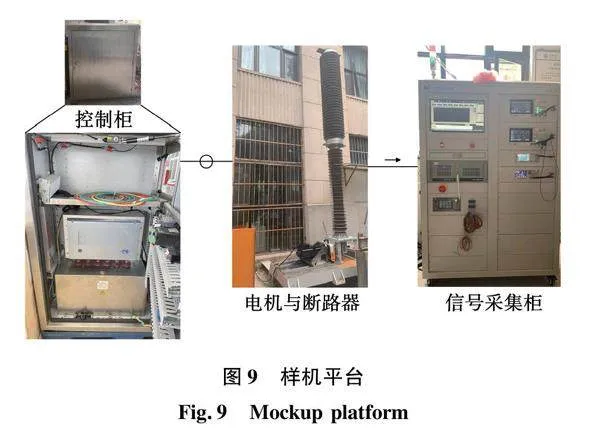
实验平台为电机直驱操动机构配一台126 kV断路器,设备数据与仿真模型保持一致,控制器与电机采用分体式设计,如图9所示,实际工程中电机放置于控制柜顶层,中间层为控制器,最下层为储能电容器。控制器主板采用CPLD+DSP双核心架构,系统控制频率及采样频率均为10 kHz,系统状态信息实时存储于控制器的RAM芯片中,供上位机读取、分析。
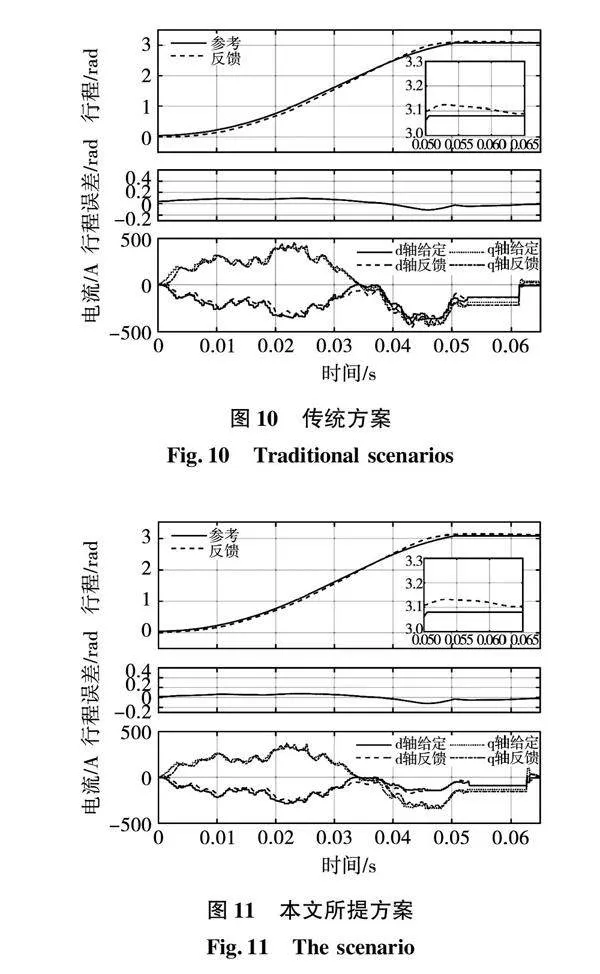
分别采用传统方法绘制的行程曲线与本文所提方法绘制的行程曲线进行实验,结果如图10和图11所示。仿真中采用的负载模型简化了传动过程中的机械碰撞、摩擦以及气体压缩等复杂过程,导致负载模型在刚分点后存在瞬时反向转矩(0.02~0.03 s),反映在仿真中便是瞬时的反向电流需求峰值,但实际过程中,该反向转矩数值及变化率都小于负载模型,因此在实验中刚分点后的瞬时电流不会存在突然的反向尖峰。从图中可以看出,2种方案均能够实现分闸操作,且行程跟踪误差曲线均较为平滑,但在灭弧区间(0~0.035 s)内,本文所提方案最大跟踪误差为0.077 rad,传统方法最大跟踪误差为0.094 rad,跟踪效果更好,可以有效提高跟踪精度,减小系统的稳态误差。此外,从全局电流环指令的有效值幅值可知,本文所提方案有着更低的转矩需求。
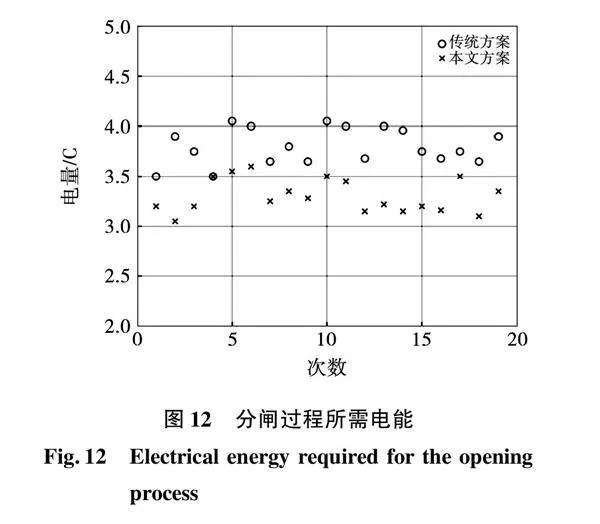
从单次分闸动作所需电量的角度可以体现出该方案的另一优势,图12为传统方法与本文所提方法分别进行19次分闸动作的电能消耗分布图,借助于多目标优化算法中构建的转矩需求评价指标,能够在最佳曲线选择过程中,综合评价筛选出电能消耗与其他指标相对折衷的最佳曲线,从图中可以看出,与常规方法相比,本文所提方法能够减少10.3%的电能消耗,对于缩减储能电容容值及体积,提升控制系统整体功率密度有着巨大的指导意义。
4 结 论
针对当前电机直驱操动机构行程曲线无法有效匹配机构及系统特性,且缺乏系统性规划方法的问题,提出一种基于多项式模型及多目标优化的电机直驱操动机构行程曲线规划方法,采用多项式模型生成行程曲线簇,基于电机直驱操动机构及断路器运行指标构建多目标优化算法,筛选出最佳行程曲线。
本文所提方案,规划效率高,规划过程无需过多的人工干预,实际运行效果与传统设计方法并经多次人工干预优化后的曲线相当,能够解决行程曲线与机构及系统特性匹配以及曲线设计过程中的优化问题,使断路器获得良好的动态响应特性的同时降低了系统调试成本,实现电机直驱操动机构的稳定、可靠运行,且能够实现10.3%的能耗优化,提升系统整体功率密度。
参 考 文 献:
[1]BOSMA Anne, CAMERONI Roberto, BLUNDELL Mark. Introducing a new generation of operating mechanism for high voltage AC circuit-breakers[J]. Journal of Electrical amp; Electronics Engineering, 2002, 21(3): 233.
[2]LIU Zhiyuan, WANG Jimei, XIU Shixin, et al. Development of high-voltage vacuum circuit breakers in China[J]. IEEE Transactions on Plasma Science, 2007, 35(4): 856.
[3]林莘, 王德顺, 马跃乾. 新一代高压断路器直线伺服电动机操动机构[J]. 电气时代, 2007(2): 68.
LIN Xin, WANG Deshun, MA Yueqian. A new generation of linear servomotor operating mechanism for high voltage circuit breaker[J]. Electric Times, 2007(2): 68.
[4]张智超. 基于DSP的126 kV高压断路器电机操动机构控制系统研究[D]. 沈阳:沈阳工业大学, 2018.
[5]滕云龙. 高压断路器操动机构的驱动电机及其控制系统的研究[D]. 沈阳:沈阳工业大学, 2019.
[6]杨明. 126kV真空断路器新型永磁操动机构研究[D]. 南京:东南大学, 2017.
[7]芦宇峰. SF6高压断路器智能化操动机构的设计[D]. 哈尔滨:哈尔滨理工大学, 2013.
[8]芦宇峰, 孟大伟, 徐永明, 等. SF6高压断路器智能化操动机构的研究与优化[J]. 电机与控制学报, 2013, 17(7): 94.
LU Yufeng, MENG Dawei, XU Yongming, et al. Research and optimization of intelligent operating mechanism for SF6 high voltage circuit breaker[J].Electric Machines and Control,2013,17(7):94.
[9]HUANG Yulong, WANG Jingjun, ZHANG Wenchao, et al. A motor-drive-based operating mechanism for high-voltage circuit breaker[J]. IEEE Transactions on Power Delivery, 2013, 28(4): 2602.
[10]唐诚, 韩书谟, 吴军辉, 等. 高压断路器电机驱动操动机构控制方法[J]. 微电机, 2017, 50(2): 32.
TANG Cheng, HAN Shumu, WU Junhui, et al. Control strategy for motor drive mechanism of high-voltage circuit breaker[J]. Micromotors, 2017, 50(2): 32.
[11]林莘, 王德顺, 徐建源, 等. 单神经元PID控制器在高压断路器运动控制技术中的应用[J]. 电工技术学报, 2009, 24(6): 35.
LIN Xin, WANG Deshun, XU Jianyuan, et al. Application of single neuron PID controller in movement control of high voltage circuit breaker[J]. Transactions of China Electrotechnical Society, 2009, 24(6): 35.
[12]YOU S, GIL J, KIM W. Adaptive neural network control using nonlinear information gain for permanent magnet synchronous motors[J].IEEE Transactions on Cybernetics,2021,53(3):1392.
[13]LIU B, YU D, ZENG X, et al. Practical discontinuous tracking control for a permanent magnet synchronous motor[J]. Mathematical Biosciences and Engineering, 2023, 20(2): 3793.
[14]刘刚, 张婧, 郑世强, 等. 基于参数在线辨识的高速永磁电机无差拍电流预测控制[J].电机与控制学报,2023,27(9):98.
LIU Gang, ZHANG Jing, ZHENG Shiqiang, et al. Deadbeat predictive current control of high speed permanent magnet motor based on online parameter identification[J]. Electric Machines and Control, 2023, 27(9): 98.
[15]周世炯, 李耀华, 史黎明, 等. 基于自适应非线性跟踪微分器的直线电机位置和速度检测方法[J]. 电机与控制学报, 2023, 27(10): 24.
ZHOU Shijiong, LI Yaohua, SHI Liming, et al. Linear motor position and speed measurement method based on adaptive nonlinear tracking differentiator[J]. Electric Machines and Control, 2023, 27(10): 24.
[16]邓赟, 武建文, 金鑫晨, 等. 基于高压断路器电机操动机构的位移分段控制策略[J].电工技术学报,2018,33(15):3586.
DENG Yun, WU Jianwen, JIN Xinchen, et al. Displacement subsection control strategy based on motor operating device of high voltage circuit breaker[J]. Transactions of China Electrotechnical Society, 2018, 33(15): 3586.
[17]邵盛楠, 黄瑜珑, 王静君, 等. 高压断路器电动机驱动操动机构的研究[J]. 高电压技术, 2008, 34(3): 555.
SHAO Shengnan, HUANG Yulong, WANG Jingjun, et al. Motor drive mechanism of high-voltage circuit breaker[J]. High Voltage Engineering, 2008, 34(3): 555.
[18]林莘, 王德顺, 徐建源. 高压断路器直线伺服电机操动机构及其控制技术[J]. 中国电机工程学报, 2008, 28(27): 137.LIN Xin, WANG Deshun, XU Jianyuan. Linear servo motor operating mechanism and control technology for high-voltage circuit breaker[J]. Proceedings of the CSEE, 2008, 28(27): 137.
[19]HE D, ZHONG J, HAO L, et al. Motor direct-drive high-voltage circuit breaker servo mechanism path dynamic planning method[C]//2021 International Conference on Advanced Electrical Equipment and Reliable Operation(AEERO),Oct.15-17,2021,Beijing, China. 2021: 1-5.
[20]王潇. 高压真空断路器电机直驱操动机构控制策略研究[D]. 湘潭:湘潭大学, 2019.
[21]TAKAHASHI A, HONGO T, NINOMIYA Y, et al. Local path planning and motion control for AGV in positioning[C]// Proceedings of the 24th symposium of Society of Instrument and Control Engneers of Japan, Sept. 4-6, 1989, Tsukuba, Japan. 1989: 392-397.
(编辑:刘琳琳)
收稿日期: 2023-08-11
基金项目:国家电网公司总部科技项目(5500-202199520A-0-5-ZN)
作者简介:王 潇(1992—),男,博士研究生,研究方向为高性能电机控制;
吴旭升(1976—),男,博士,教授,博士生导师,研究方向为大功率电机控制、无线充电技术等;
肖 曦(1973—),男,博士,教授,博士生导师,研究方向为高性能电机控制、海浪发电技术、电力储能与微电网技术。
通信作者:肖曦
