基于改进人工势场法的医疗配送机器人路径规划
2024-05-24刘澳霄周永录刘宏杰
刘澳霄 周永录 刘宏杰
摘 要:随着科技的高速发展和近几年新冠疫情的影响,医疗配送机器人开始逐步出现在各大医疗机构中,然而传统医疗配送机器人在使用人工势场算法进行路径规划时存在局部最优解和目标不可达问题。因此,针对局部最优解问题,提出了设计虚拟目标点的方法,将机器人从局部最优状态解救出来;针对目标不可达问题,在障碍物斥力势场函数中引入了目标距离函数对障碍物斥力进行限制,从而解决目标不可达问题。最后将该方法在多种复杂环境中与传统算法进行比较验证,实验结果表明,该改进算法能够解决传统算法存在的局部最优解和目标不可达问题,在算法效率上也提高了5%~9%,并且能够有效运用于实际场景。
关键詞:路径规划; 人工势场法; 医疗配送机器人; 局部最优; 目标不可达
中图分类号:TP242.6 文献标志码:A
文章编号:1001-3695(2024)03-029-0842-06
doi:10.19734/j.issn.1001-3695.2023.07.0298
Path planning of medical delivery robot based onimproved artificial potential field method
Liu Aoxiao, Zhou Yonglu, Liu Hongjie
(School of Information Technology, Yunnan University, Kunming 650500, China)
Abstract:With the rapid development of science and technology and the impact of the novel coronavirus epidemic in recent years, medical delivery robots have gradually appeared in major medical institutions. However, traditional medical delivery robots have local optimal solution problems and target unreachable problems when using artificial potential field algorithms for path planning. Therefore, for the local optimal solution problem, this paper proposed a method of designing virtual target points to rescue the robot from the local optimal state. It introduced the target distance function into obstacle repulsion potential field function to limit obstacle repulsion, to solve the problem of target unreachable. Finally, it compared the proposed method with the traditional algorithm in a variety of complex environments. The results show that the improved algorithm can solve the local optimal solution and target unreachable problems existing in the traditional algorithm, and the efficiency of the algorithm is also increased by 5%~9% and can be effectively applied to practical scenarios.
Key words:path planning; artificial potential field method; medical delivery robots; local optimality; target unreachable
0 引言
随着医疗技术的不断发展和医疗服务需求的增加,医疗机构面临着更高效、更准确的物流管理和配送需求。以往的医疗物品和药品配送通常由医护人员手动完成,需要耗费大量时间和劳动力,并且存在工作人员操作不当导致物品受损的风险。为了解决这些问题,医疗配送机器人应运而生。医疗配送机器人主要用于医院、诊所和其他医疗机构内部进行物品配送。它们可以将药品从药房运送到各个病房或诊所,确保及时供应,也可以将采集的样本从病房或诊所送往实验室进行检测。同时可以协助将医疗设备从存储区域运送到手术室或其他需要的地方,或者用于医院内部的餐饮服务,将食物和饮料送到病人或员工的位置。医疗配送机器人提供了快速、准确和高效的物流服务,帮助医疗机构有效提高了工作效率,减轻了医护人员的负担,并改善了整体医疗服务质量。医疗配送机器人如图1所示。
通常机器人的路径规划可以分为全局路径规划和局部路径规划两种。全局路径规划算法有动态规划算法、启发A*算法[1]、遗传算法[2]、蚁群算法[3]和迪杰斯特算法[4]等。局部路径算法有多项式曲线法[5]、人工势场法[6]、粒子群算法[7]、B样条曲线法和模拟退火算法等。Abadlla等人提出将人工势场法与模糊逻辑法进行结合得到新的方法,该方法在一定程度上解决了传统人工势场法存在的局部最优解问题,但是却存在机器人反复振荡的问题[8]。Feng等人[9]提出在人工势场法中引入正六边形引导方法,通过对障碍物进行绕行以此避免陷入局部最优解问题,但这在复杂环境中极大增加了机器人运行时间。姬伟等人[10]在人工势场中引入虚拟障碍物,利用虚拟障碍物打破平衡进而解决局部最优解问题,然而在实际运用中不易选取合适的障碍物。张建英等人[11]针对人工势场法存在的局部最优解问题,提出了一种附加控制力的方法,当障碍物对机器人的排斥力与目标点对机器人的吸引力位于同一直线上时,通过在障碍物中添加控制力进而解决局部最优解问题。Yuan等人[12]使用矢量叠加法在斥力势场函数中添加机器人与目标点相对位置的权重因子,解决了目标不可达问题。任彦等人[13]在传统人工势场法中目标点产生吸引力的前提下,提出一种对比阈值,建立虚拟牵引点的方法,以此解决局部极小问题。段建民等人[14]针对传统人工势场法存在的目标不可达问题,提出将人工势场法和遗传算法两种方法相结合,利用人工势场法来优化采用遗传算法所得到的全局路径。
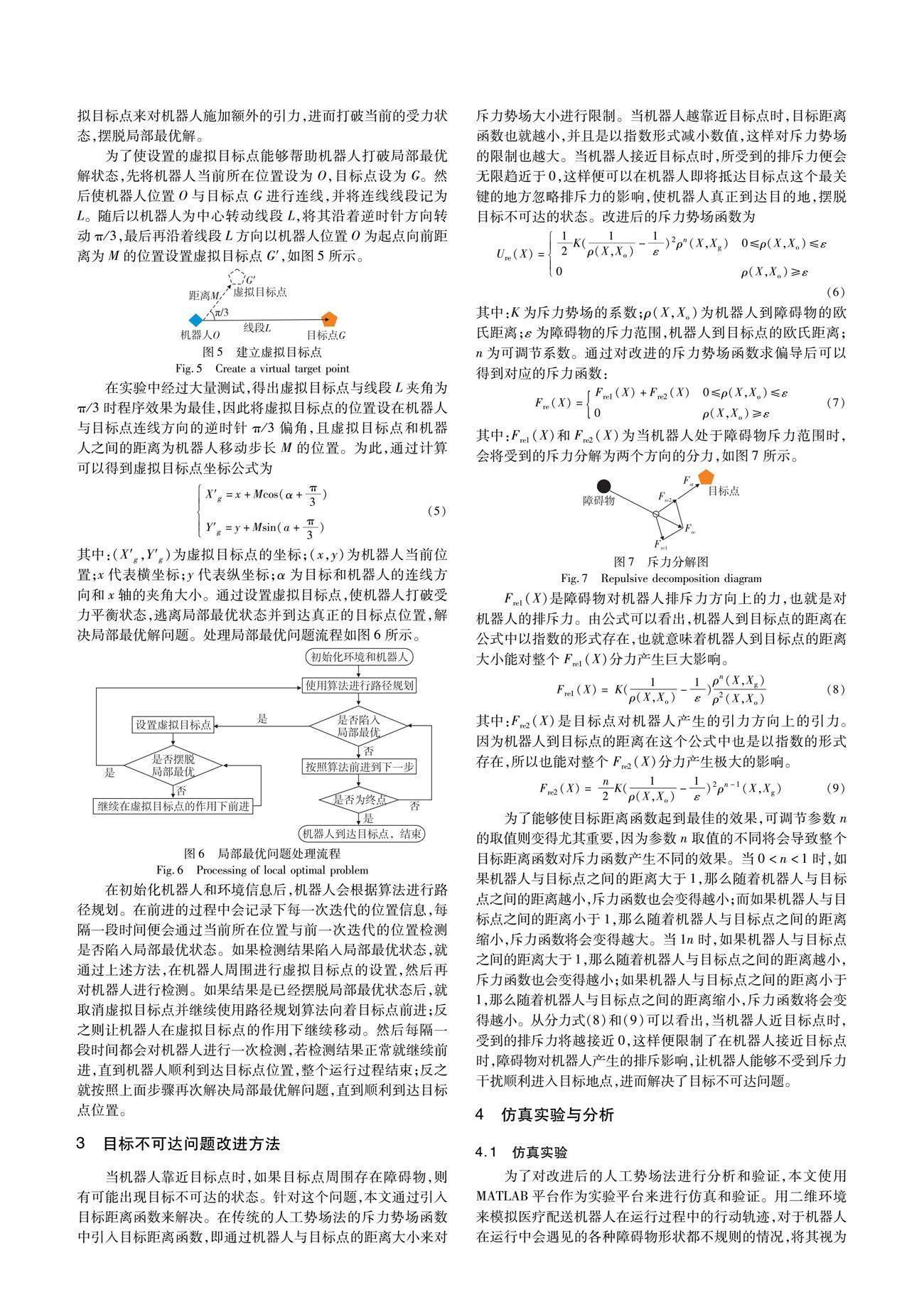
针对局部最优解问题,本文提出引入虚拟目标点,当机器人陷入局部最优解时通过设置虚拟目标点来施加一个外力,使机器人打破现状跳出局部最优解状态,进而继续向目标点前进;针对目标不可达问题,本文提出了在斥力函数中引入目标距离函数,利用机器人和目标点之间的距离来对斥力势场函数进行限制,进而解决人工势场法存在的目标不可达问题。
1 人工势场算法
人工势场算法的主要思想是将整个环境设为一个虚拟力场,将主体机器人设为一个带负电荷的粒子,将目标点设为一个带正电荷的粒子,产生引力势场。它会对主体产生一个方向朝向目标点的吸引力,这个吸引力会驱使主体向目标点方向运动[15]。然后将环境中的各种障碍物设为带负电的粒子,产生斥力势场。当主体与障碍物的范围过近时,障碍物会对主体产生一个反方向的排斥力,会驱使主体远离障碍物。通过这种方法来约束机器人的行动轨迹,并将其引导至目标点。机器人的受力图如图2所示。
1.1 引力函数
引力势场是由目标点产生的一种全局范围性的势场,势场的大小会根据机器人与目标点的距离大小而进行变化。当机器人距离目标点越远时,其受到的引力势场也将越大,即机器人受到的引力也会越大;当机器人距离目标点越近时,其受到的引力势场会变得越小,机器人受到的引力也会越来越小。通常将引力势场函数定义为
为了能够使目标距离函数起到最佳的效果,可调节参数n的取值则变得尤其重要,因为参数n取值的不同将会导致整个目标距离函数对斥力函数产生不同的效果。当0<n<1时,如果机器人与目标点之间的距离大于1,那么随着机器人与目标点之间的距离越小,斥力函数也会变得越小;而如果机器人与目标点之间的距离小于1,那么随着机器人与目标点之间的距离缩小,斥力函数将会变得越大。当1n时,如果机器人与目标点之间的距离大于1,那么随着机器人与目标点之间的距离越小,斥力函数也会变得越小;如果机器人与目标点之间的距离小于1,那么随着机器人与目标点之间的距离缩小,斥力函数将会变得越小。从分力式(8)和(9)可以看出,当机器人近目标点时,受到的排斥力将越接近0,这样便限制了在机器人接近目标点时,障碍物对机器人产生的排斥影响,让机器人能够不受到斥力干扰顺利进入目标地点,进而解决了目标不可达问题。
4 仿真实验与分析
4.1 仿真实验
为了对改进后的人工势场法进行分析和验证,本文使用MATLAB平台作为实验平台来进行仿真和验证。用二维环境来模拟医疗配送机器人在运行过程中的行动轨迹,对于机器人在运行中会遇见的各种障碍物形状都不规则的情况,将其视为带有一定半径的圆形图像作为障碍物,这样更加符合实际情况。本文首先在簡单环境下验证了改进算法对目标不可达问题和局部最优解问题的处理效果。然后为了更加贴近实际运用场景,又在复杂环境下对改进算法进行测试。最后与文献[16]的算法进行比较,进一步测试本文算法。
本次实验对传统的人工势场算法存在的局部最优解问题和目标不可达问题分别进行改进。在实验中将机器人的起点位置设置为绿色圆圈,目标点设置为红色六边形,中间的运行过程用红色线段进行表示,静态障碍物用圆形物体表示,动态障碍物用粉红色的圆形物体表示(参见电子版)。当机器人在运行中所受到障碍物的总排斥力和受到来自目标点的引力大小相同、方向相反时,就会陷入局部最优解状态,如图8所示。针对这个问题,本文提出了设置虚拟目标点的方法。虚拟目标点会对机器人产生一个额外的引力,以至于使机器人打破先前的受力平衡,走出局部最优解状态,向着真正的目标点前进。改进后的实验结果如图9所示,其中蓝色图形为设置的虚拟目标点(参见电子版)。
随着机器人靠近目标点,所受到的引力势场将会越来越小,如果这时在终点附近存在障碍物,将可能导致机器人受到的斥力势场越来越大,进而最终出现机器人在目标点前面静止不动或者往返重复运动的现象,这便是目标不可达状态,如图10所示。针对目标不可达问题,本文提出了在斥力势场中引入目标距离函数,随着机器人与目标点的距离越小,目标距离函数也将会以指数的形式逐渐减小,进而约束周围的障碍物斥力大小,解决目标不可达问题,如图11所示。
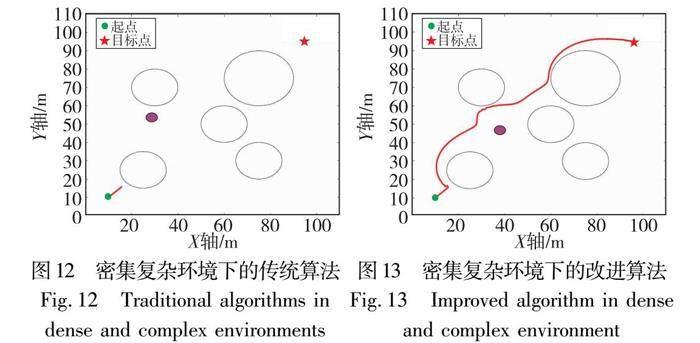
为了更加贴合实际运用场景,本文将改进前后的算法分别在不同复杂环境中进行模拟仿真,并且在静态障碍物的基础上再引入动态障碍物,以此模拟现实情况中的不稳定因素。首先本文设置了障碍物分布密集集中型场景,如图12所示,使用传统算法很快便陷入了局部最优解状态,机器人在障碍物前面不动。随后在同样的场景中使用改进后的算法,优化效果非常明显。机器人成功摆脱了局部最优解状态,并且安全避开了设置的所有静态障碍物和动态障碍物,顺利到达了目标点,如图13所示。
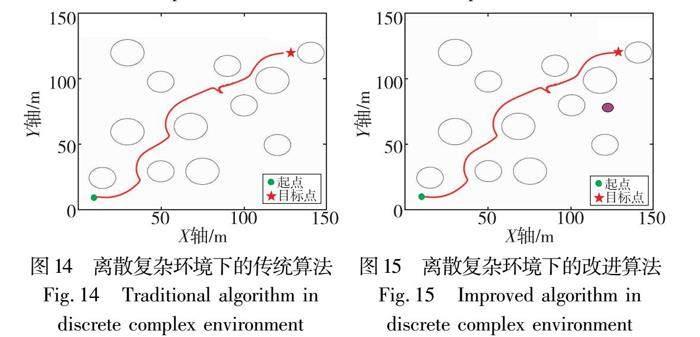
除此之外,本文还设置了障碍物分布离散型复杂场景。首先使用了传统算法进行实验,实验效果如图14所示。机器人虽然也避开了各种障碍物,但是却最终止步于目标点前,陷入了目标不可达状态。在实际场景中,机器人停止不动和来回往返运动的这些情况将会浪费非常多的时间,尤其是在医疗工作中,时间就是生命,每浪费一秒钟都很有可能导致患者病情恶化甚至威胁其生命安全。而改进后的算法顺利解决了目标不可达状态,能够使机器人安全准时地到达目的地,避免了以上情况的出现,如图15所示。
本文采用文献[16]所提出的人工势场改进算法,在复杂环境中进行模拟对比实验。此算法为新提出的人工势场改进算法,在其文献中提出使用新的势能函数来代替传统人工势场法中的势能函数,并且增加虚拟吸引点,进而达到摆脱局部最优解的情况。仿真结果如图16所示,虽然其解决了局部最优解问题,但是在即将到达目标点时也陷入了目标不可达状态,在此之前一共迭代222次。而在同样的环境中,使用本文改进算法效果如图17所示。机器人顺利解决了目标不可达和局部最优解问题,到达了目标点位置。整个过程一共只迭代了204次,再经过多次实验后得出在算法效率上提高了约9%。
最后,将本文算法与传统APF算法、基于全局路径规划的A*算法和文献[16]所提出的APF*算法分别在上文的离散复杂环境和密集复杂环境中进行仿真实验,将得到的结果和本文算法结果进行比较。表1为不同算法在不同环境下机器人从起点到终点所需要的迭代步数,表2为不同算法在不同环境下路径中的算法运行时间。其中*表示在环境中存在动态障碍物,没有*则表示为静态障碍物环境。为了保证数据的准确性,本文对动态障碍物的初始状态和移动轨迹进行随机设置,并且进行多次实验,取其平均值作为最终数值。
A*算法是一种启发式搜索的全局路径规划算法,它会对可能前进的方向进行最优遍历,因此当处于复杂的环境时,它会需要迭代更多的步骤进而到目标点,算法消耗时间也会变多。由表1可以看出,当处于密集静态和动态环境中时,本文算法相较于A*算法减少了约31%的迭代次数,当处于离散环境中时,本文算法相较于A*算法减少了约23%的迭代次数。本文算法相比于传统APF算法在密集静态环境和离散环境中,在迭代次数方面有着一定的优化,而在密集动态环境中,因为受到动态障碍物的影响,导致转角次数过多,所以使得优化效果不是很明显。相比于APF*算法在密集环境中减少了约6%的迭代次数,当处于离散环境中时,减少了约7%的迭代次数。由表2可知,本文算法相较于A*算法在密集复杂环境中的运行效率提高了约31%,在离散环境中算法运行效率提高了约25%。本文算法与APF*算法相比,在密集环境中的运行效率提高了约5%,结合上文可知,本文算法相比于APF*算法不仅解决了目标不可达问题,并且在算法效率上提高了5%~9%。因此本文算法不仅能有效解决传统人工势场法存在的局部最优解问题和目标不可达问题,而且在算法运行效率上也有提高。
4.2 實验研究
为了验证本文算法在实际应用场景中的实用性和可行性,本次实验使用Ubuntu操作系统中的ROS机器人系统进行操作,同时将本文改进算法应用到Turtlebot移动机器人上,如图18所示。Turtlebot机器人通过移动底盘Kobuki进行移动,再运行Rplidar A1激光雷达对周围环境进行扫描,并结合ROS操作系统中的Gmapping模块完成定位和二维地图的构建,最后通过Move_base模块中的Global_planner和Local planner分别完成Turtlebot机器人的全局路径规划和局部路径规划。
为了验证本文算法的实用性,本文取现实中一家医院的内部一段楼道区域作为实验场景,如图19(a)所示。随后使用Turtlebot移动机器人上的激光雷达对周围环境进行扫描,然后使用ROS系统的可视化模块Rviz来构建场景二维地图,如图19(b)所示。
最后将原始人工势场法和本文提出的改进人工势场法先后应用到Turtlebot机器人进行对比实验,设置相同的起点A和终点B,经过实验得到图19(c)(d)。由图19(c)可以看出,机器人整体路径较为曲折,由于在机器人前进过程中存在行人走动的情况,导致机器人转弯角度过大,容易造成碰撞风险;或者使机器人静止不动和往返迂回,导致整个移动路径显得非常曲折。由图19(d)可以看出,改进后的算法相较于传统算法,整个移动路径显得更加平滑,没有那么多的迂回曲折,在避开障碍物时转弯角度也相对更小,有效减少了机器人的碰撞风险,解决了传统算法中存在的机器人停止不动和往返移动的问题,整体路径长度和移动时间也比传统算法所需要的更少,与上文仿真结果基本一致。
实验结果证明,本文提出的改进人工势场算法能够有效应用于实际医疗配送机器人路径规划中,相比于传统人工势场法,改进算法优化了避障策略,解决了传统算法存在的一系列问题,并且提高了路径的平滑程度,缩短了机器人行进路径,并缩短了运行时间,能够在实际的复杂环境中更加高效和快速地完成工作。
5 结束语
人工势场法作为传统的局部路径算法,整个运行原理不仅简单,而且实验耗材也少,整个避障运行效果也较为优秀,因此被广泛用于机器人路径规划上,但是由于算法本身的局限性,存在着局部最优解和目标不可达这两大问题。针对局部最优解问题,本文提出了设计虚拟目标点的方法来对机器人额外施加一个引力,打破现有的受力平衡状态,将机器人从局部最优状态解救出来。针对目标不可达问题,本文在障碍物斥力势场函数中引入了目标距离函数,通过使用机器人与目标点的欧氏距离来对障碍物斥力进行限制,解决了目标不可达问题。最后进行实验验证,由结果可知,改进后的算法相比于传统算法,已经解决了所存在的问题,算法运行效果有很大的提升。在机器人实际运行中,还存在机器人转向次数过多和转向曲率过大等问题,在后续的研究中会继续优化,并且进一步提高算法的运行效率。
参考文献:
[1]汪四新, 谭功全, 蒋沁,等. 基于改进A~*算法的移动机器人路径规划[J]. 计算机仿真, 2021,38(9): 386-389,404. (Wang Sixin, Tan Gongquan, Jiang Qin, et al. Path planning of mobile robot based on improved A~* algorithm[J]. Computer Simulation, 2021,38(9): 386-389,404.)
[2]李艳生, 万勇, 张毅,等. 基于人工蜂群—自适应遗传算法的仓储机器人路径规划[J]. 仪器仪表学报, 2022,43(4): 282-290. (Li Yansheng, Wan Yong, Zhang Yi, et al. Based on artificial bees-warehouse robot path planning of adaptive genetic algorithm[J]. Journal of Instruments and Meters, 2022(4): 282-290.)
[3]吴庆洪, 张纪会, 徐心和. 具有变异特征的蚁群算法[J]. 计算机研究与发展, 1999 (10): 1240-1245. (Wu Qinghong, Zhang Jihui, Xu Xinhe. Ant colony algorithm with variation characteristics[J]. Journal of Computer Research and Development, 1999(10): 1240-1245.)
[4]王树西, 吴政学. 改进的Dijkstra最短路径算法及其应用研究[J]. 计算机科学, 2012,39(5): 223-228. (Wang Shuxi, Wu Zhengxue. Improved Dijkstra shortest path algorithm and its application[J]. Computer Science, 2012,39(5): 223-228.)
[5]杨连喜, 徐晨东. 一种用多项式曲线逼近有理曲线的新方法[J]. 浙江大学学报:理学版, 2015,42(1): 21-27. (Yang Lianxi, Xu Chendong. A new method for approximating rational curves by polynomial curves[J]. Journal of Zhejiang University:Science Edition, 2015,42(1): 21-27.)
[6]辛鹏, 王艳辉, 刘晓立,等. 优化改进RRT和人工势场法的路径规划算法[J]. 计算机集成制造系統,2023,29(9): 2899-2907. (Xin Peng, Wang Yanhui, Liu Xiaoli,et al. Optimization and improvement of path planning algorithm of RRT and artificial potential field method[J]. Computer Integrated Manufacturing Systems,2023,29(9): 2899-2907.)
[7]郝琨, 邓晁硕, 赵璐,等. 基于区域搜索粒子群算法的机器人路径规划[J]. 电子测量与仪器学报, 2022,36(12): 126-135. (Hao Kun, Deng Chaoshuo, Zhao Lu ,et al. Robot path planning based on region search particle swarm algorithm[J]. Journal of Electronic Measurement and Instrument, 2022,36(12): 126-135.)
[8]Abdalla T Y, Abed A A, Ahmed A A. Mobile robot navigation using PSO-optimized fuzzy artificial potential field with fuzzy control[J]. Journal of Intelligent & Fuzzy Systems, 2017,32(6): 3893-3908.
[9]Feng Ding, Yuxi Shi, Guopu Zhu, et al. Real-time estimation for the parameters of Gaussian filtering via deep learning[J]. Journal of Real-Time Image Processing, 2020,17(1): 17-27.
[10]姬伟, 程风仪, 赵德安, 等. 基于改进人工势场的苹果采摘机器人机械手避障方法[J]. 农业机械学报, 2013,44(11): 253-259. (Ji Wei,Cheng Fengyi,Zhao Dean,et al. Obstacle avoidance method of apple picking robot manipulator based on improved artificial potential field[J].Trans of the Chinese Society for Agricultural Machinery, 2013,44(11): 253-259.)
[11]张建英, 赵志萍, 刘暾. 基于人工势场法的机器人路径规划[J]. 哈尔滨工业大学学报, 2006,38(8): 1306-1309. (Zhang Jian-ying, Zhao Zhiping, Liu Tun. Path planning of robot based on artificial potential field method[J]. Journal of Harbin Institute of Technology, 2006,38(8): 1306-1309.)
[12]Yuan Jiemin, Shen Haiyun. Research on local path planning of mobile robot based on artificial potential field method[C]//Proc of the 3rd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference. Piscataway, NJ: IEEE Press, 2019: 785-789.
[13]任彥, 赵海波. 改进人工势场法的机器人避障及路径规划[J]. 计算机仿真, 2020,37(2): 360-364. (Ren Yan, Zhao Haibo. Robot obstacle avoidance and path planning with improved artificial potential field method[J]. Computer Simulation, 2019,37(2): 360-364.)
[14]段建民, 陈强龙. 基于改进人工势场—遗传算法的路径规划算法研究[J]. 国外电子测量技术, 2019,38(3): 19-24. (Duan Jianmin, Chen Qianglong. Based on improved artificial potential field-path planning algorithm of genetic algorithm research[J]. Journal of Foreign Electronic Measurement Technology, 2019, 38(3): 19-24.)
[15]刘建娟, 薛礼啟, 张会娟,等. 融合改进A~*与DWA算法的机器人动态路径规划[J]. 计算机工程与应用, 2021, 57(15): 73-81. (Liu Jianjuan, Xue Liqi, Zhang Huijuan, et al. Robot dynamic path planning based on improved A~* and DWA algorithms[J]. Computer Engineering and Applications, 2019,57(15): 73-81.)
[16]薛阳, 俞志程, 吴海东,等. 基于改进人工势场法的双机械臂避障路径规划[J]. 机械传动, 2020,44(3): 39-45. (Xue Yang, Yu Zhicheng, Wu Haidong, et al. Obstacle avoidance path planning for double robotic arms based on improved artificial potential field method[J]. Journal of Mechanical Transmission, 2020,44(3): 39-45.)
[17]Sun Yong, Chen Wen, Lyu Jun. UAV path planning based on improved artificial potential field method[C]//Proc of International Conference on Computer Network, Electronic and Automation. Pisca-taway, NJ: IEEE Press, 2022: 95-100.
