人体腰部辅助外骨骼及控制方法的设计
2024-05-21谷宏治王添鑫闫泽峰徐东亮
□ 谷宏治 □ 王添鑫 □ 闫泽峰 □ 徐东亮 □ 雍 旭
1.西安向阳航天材料股份有限公司 西安 710075
2.武汉理工大学 机电工程学院 武汉 430070
3.华中科技大学 机械科学与工程学院 武汉 430074
4.中国科学院深圳先进技术研究院 广东深圳 518055
1 设计背景
尽管现代工厂普遍使用机器人和与工作相关的自动化设备来搬运沉重的、超出人类能力的货物,但是仍然有许多任务需要手工操作,尤其是在物流业、制造业和医疗行业。根据国家统计局的调查研究,从事物流工作的员工背痛的比例为84%,从事建筑工作的员工腰椎受压的比例为75%,从事医疗工作的员工背痛的比例为67%,此外,有31%~45%从事重体力劳动的劳动者因为肌肉和肌腱损伤而退休[1]。由工作产生的员工个体腰椎损伤和职业病经济补偿,会影响职工的生活质量,增加企业的经济成本,是一个重大的社会问题[2]。随着腰肌劳损患者的增加,迫切需要开发一种轻便的腰肌辅助外骨骼,为从事繁重或重复性负重工作的劳动者提供帮助。
如今,许多学者和研究机构都在开发动力辅助装置,以保护在制造、建筑、肉品包装、护理方面经常进行手动操作和负重任务的劳动者。研究者根据需求设计出各种下背部辅助外骨骼,在躯干和大腿之间提供帮助,以减轻腰椎负荷。各种被动外骨骼系统被提出,这些系统使用弹性带提供机械辅助,来搬运物体[3-7]。
针对需求,笔者设计了一种轻巧、可穿戴的动力型人体腰部辅助外骨骼机械结构,并对外骨骼的关键部位进行有限元分析。同时简化人体举重过程为坐标连杆模型,建立系统动力学模型,进而提出一种基于自适应算法的人体腰部辅助外骨骼控制方法。通过构建试验,测量得到腰竖脊肌、胸竖脊肌、背阔肌的肌电信号,借助MATLAB工具对所提出的控制方法进行轨迹规划试验仿真,与实际搬运者轨迹进行对比,分析人机相容性。笔者所做研究有助于劳动者搬运工作时减小腰椎压力,降低背部发生与工作相关的肌肉骨骼疾病的风险[8]。
2 人体腰部辅助外骨骼设计
人体腰部辅助外骨骼是一种辅助劳动者搬动重物的装置,目的在于减小腰部用力,达到减少腰部损伤的效果。为了满足人体穿戴方便的要求,同时符合人体形态,保证在穿戴外骨骼时不会妨碍人体的正常运动,对人体腰部辅助外骨骼的腰部、髋关节、大腿进行了设计,结构如图1所示。

图1 人体腰部辅助外骨骼结构
腰部设计为凹体形状,使劳动者弯腰时与弧形的设计面贴合更加紧密,采取中间凹形、两边有支撑板的形式,限制左右自由度。将电机驱动器、电池系统等模块安装于髋关节。在劳动者搬运重物的过程中,除了需要承受物体的重力,还要承受外骨骼的重力,这对长时间穿戴外骨骼的劳动者而言是一个负担。对此,将人体腰部辅助外骨骼的质量定为6 kg。通常劳动者在搬运重物时,髋关节上的扭矩为70 N·m。为了在劳动者搬运重物时有明显的辅助性效果,在两个髋关节上的持续扭矩设定为70 N·m,这样可以加强髋关节的伸屈。劳动者直立时,髋关节处的运动角度设定为向前120°,向后30°,可以满足劳动者正常步行和搬运重物的要求。髋关节设置上下伸缩功能,配合腰部的调节机制,可以满足不同劳动者的穿戴需求。
3 有限元分析
人体腰部辅助外骨骼在辅助劳动者搬运重物时,工作时间较长,加之大腿连接杆和腰部支撑板与电机直接连接,末端在电机工作的情况下会发生较大弯曲变形存在风险。为了确保长时间工作安全,需要对腰部、髋关节进行力学分析。设定大腿连接处一端受到的扭矩为70 N·m,将大腿另一端连接杆固定住,利用有限元软件对腰部和髋关节结构进行有限元分析,结果分别如图2、图3所示。
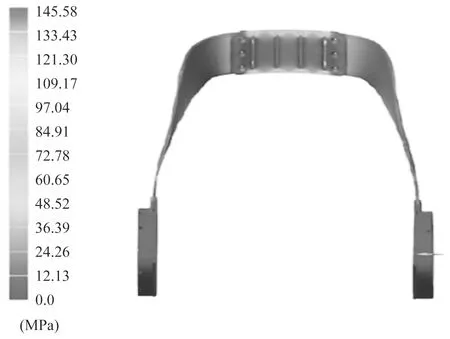
图2 腰部有限元分析结果
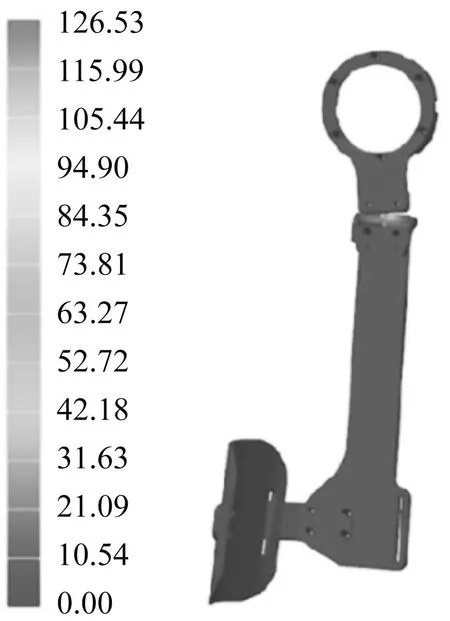
图3 髋关节有限元分析结果
由有限元分析结果可以看到,腰部的最大应力为145.58 MPa,髋关节的最大应力为126.53 MPa。此外,大腿的最大应力为139.58 MPa。
4 动态模型分析
针对穿戴人体腰部辅助外骨骼的劳动者进行搬运重物的运动过程,建立人体腰部辅助外骨骼动力学模型,以进一步精准控制外骨骼运动。采用欧拉拉格朗日方程建立人体腰部辅助外骨骼穿戴动力学模型,如图4所示。l1为腰部长度,m1为腰部质量,θ1为腰椎相对水平x轴逆时针转动的角度,l2为躯干长度,m2为脖颈以下的质量,θ2为手臂相对腰椎转动的角度,r3为手和手臂长度,m3为手和手臂质量,l3为前臂长度,m4为重物质量,l5为大腿长度,m5为大腿质量,l6为小腿长度,m6为小腿质量,l7为脚长度,m7为脚质量。
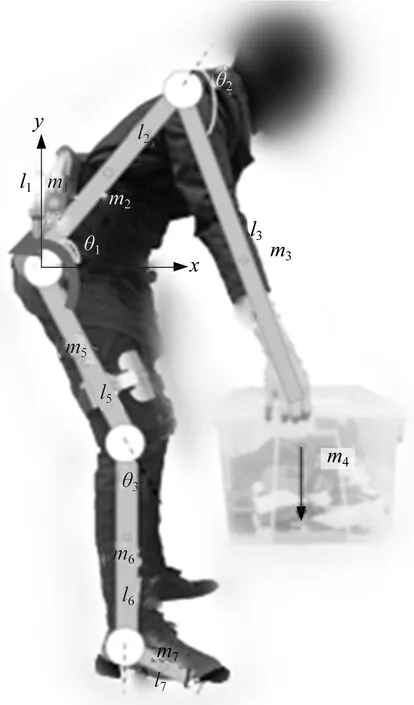
图4 人体腰部辅助外骨骼穿戴动力学模型
(1)

(2)
简化的人体腰部辅助外骨骼的质心位置矢量、质心速度矢量、质心角速度矢量分别为:
(5)
式中:r1为原点到腰部质心的距离。
(8)
式中:r2为原点到脖颈以下质心的距离。

(11)
式中:r3为原点到手和手臂质心的距离。
(14)
构件的质心速度为vi,围绕质心的惯性矩为Ji,原点所在平面为重力势能零势能面。若不考虑部件与运动副之间的弹性,则整个机构的总动能E和势能V分别为:
(15)
V=∑(migi0Py)
(16)
可以得到:
(17)
另外有:
(18)
进而得到:

(19)
在搬运重物的过程中,物体总是竖直向下的,其几何形状为:
θ2= π/2 +θ1
(20)
式(20)代入式(19),得:
(21)
5 控制方法
劳动者搬运重物的过程实质为从俯身状态双手托着重物提升到背部直立的过程[11]。因为每次搬动的重物质量不同,劳动者的高度也不一样,所以需要根据角度来决定初始位置和最终位置。由传感器获得初始角度,终点的位置为直立状态,角度固定。人体腰部辅助外骨骼的运动轨迹从初始状态到最终状态必须是平滑的,并且为了在弯腰和直立时保持平稳状态,人体腰部辅助外骨骼在开始和结束动作时加速度与速度都必须为0。运动轨迹是一个五次多项式函数,具有特定运动规则,为:
θ(t)=a1t5+b1t4+c1t3+d1t2+e1t+f1
(22)
式中:a1、b1、c1、d1、e1为因数;t为时间。
不考虑摩擦等干扰,根据上述动力学方程,可以得到人体腰部辅助外骨骼的动力学方程,为:
(23)

将m的期望值设为me,即机器人的期望轨迹。
在人体腰部辅助外骨骼的辅助过程中,自适应控制器在每个关节处提供一个n×1的辅助力矩或力M。M可以通过基于模型的自适应控制算法来确定[12],定义为:
LDm
(24)
式中:LS、LD为时变正定矩阵。
限制为滑动面,有:
(25)
可以消除不必要的稳态位置误差分数。λ为常数矩阵,特征值位于右半复平面上,并且有:
λ=LSLD-1
(26)
引入新的量mx,作为虚拟参考轨迹,有:
(27)
(28)
由此,控制策略可以改写为:
(29)

(30)
于是有:
(31)
G为n×n阶正定增益矩阵,根据总体误差确定控制器的自适应速率。利用高斯径向基函数,确定适应不同劳动者的回归矩阵Y。通过式(32)选取Y,δ成为决定机器人驱动力矩或力M的前馈项。
(32)
(33)
根据控制策略,绘制控件框图,如图5所示。
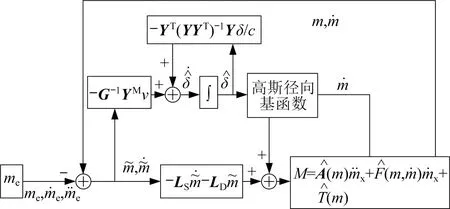
图5 控件框图
6 运动轨迹规划
根据上述计算得到控制策略,通过编译程序实现对人体腰部辅助外骨骼的轨迹规划。首先确定人体腰部辅助外骨骼的行动参数,并且参照人体特征各个部位的50%分位数进行仿真。行动参数仿真值见表1。
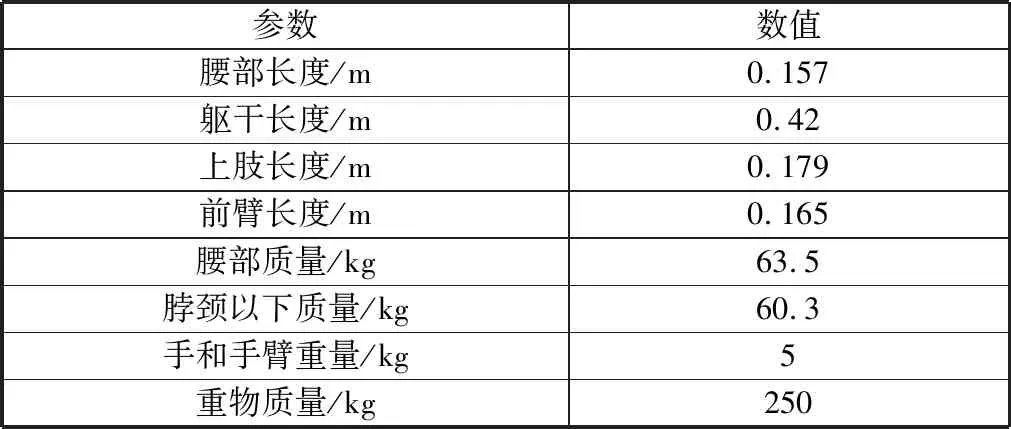
表1 行动参数仿真值
结合上述控制策略,通过MATLAB软件编译程序,对人体腰部辅助外骨骼运动轨迹进行仿真,如图6所示。初始状态相对水平面角度为30°,抬起重物后相对水平面角度为90°。重物运动轨迹如图7所示。可以看到重物的运动轨迹为一条直线,并且提升高度为0.53 m。应用所提出的控制策略,使人体腰部辅助外骨骼运动轨迹稳定,并且没有曲线走向,保证了劳动者在搬用重物过程中的姿态平稳。
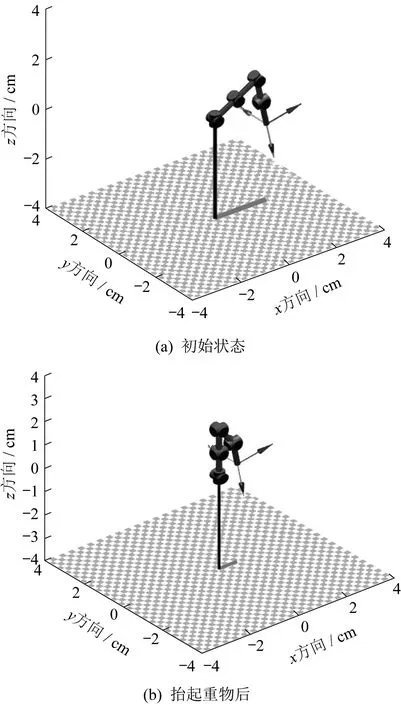
图6 人体腰部辅助外骨骼运动轨迹
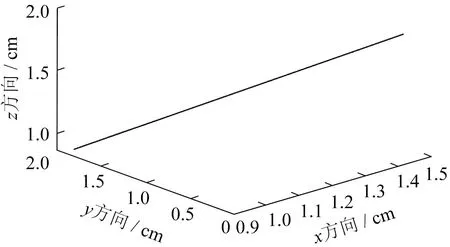
图7 重物运动轨迹
为了进一步观察运动情况,对人体腰部辅助外骨骼基本运动特征进行仿真,如图8所示。
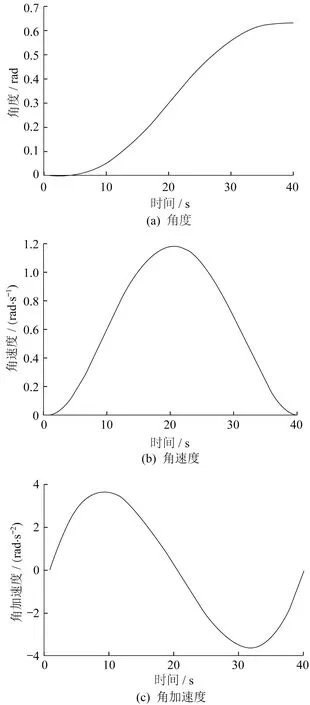
图8 人体腰部辅助外骨骼运动特征仿真
初始状态和抬起重物后,角速度和角加速度均为0,保证运动过程中过渡平稳,避免刚性碰撞,也减少电机的损伤。
7 试验
7.1 试验设备
人的背部运动有超过29种肌肉参与[14]。直立脊柱是使脊柱直立的最重要部位之一,位于脊柱的两侧,连接头部和尾骨,主要由脊柱和经肌组成。临床研究发现,腰背痛多由椎体肌肉张力引起。肌电图振幅可以反映肌肉的活动,选择竖脊肌作为评估对象。
用于记录肌电信号的设备采样率为1 000 Hz,有八个通道和一个参考电极。小型无线适配器连接到计算机主机的通用串行点线接口,数据传输通过无线保真通信实现。在受试者前方放置一个标准带手孔的储物箱,尺寸为53 mm×39mm×30 mm。试验中使用六种不同质量的重物,分别为0、5 kg、10 kg、15 kg、20 kg、25 kg,分析受试者背部左右两侧三块竖脊肌的肌电信号。竖脊肌如图9所示,分别为L3椎层间4 cm腰竖脊肌、T9椎层间4 cm胸竖脊肌、背阔肌。受试者背部电极位置如图10所示。
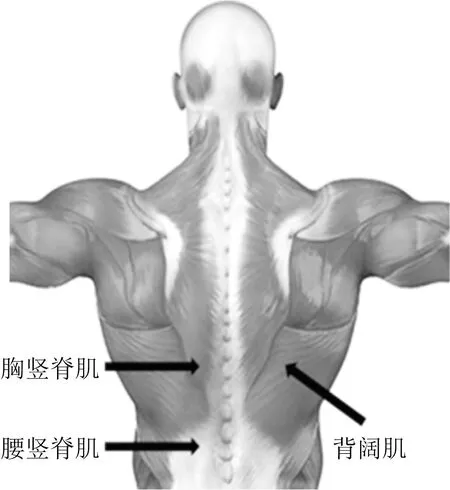
图9 竖脊肌
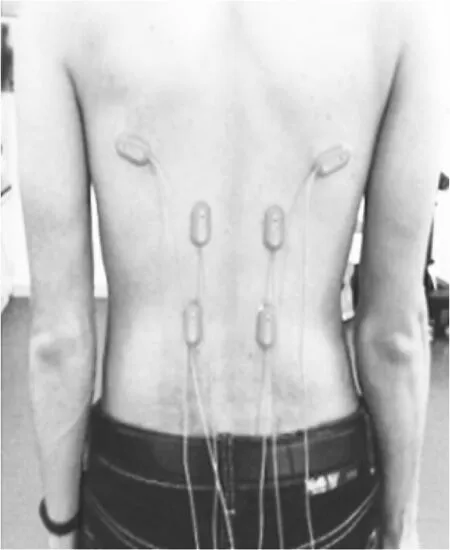
图10 受试者背部电极位置
7.2 试验过程
为了得到实际重物搬运过程中的运动特征,选择10名无腰椎疾病史或脊柱疾病史的受试者,平均年龄为25岁,体重为75 kg,身高为175 cm,自愿参与研究,进行搬运重物试验。受试者开始保持弓腰姿势,然后开始慢慢向后,以弯腰姿势举起重物。举起重物后,受试者双腿直立,保持提重物5~8 s时间。试验过程如图11所示。

图11 试验过程
7.3 试验结果
10名受试者参与试验,分别记录穿戴和不穿戴人体腰部辅助外骨骼时下背部腰竖脊肌、胸竖脊肌、背阔肌的肌电信号。经过带宽为10~500 Hz的滤波等肌电图信号处理,计算得到在一个提升周期内的积分肌电图值[15-16]。将人体腰部辅助外骨骼的辅助效率η定义为:
η=1-Tη/T
(34)
式中:Tη为受试者穿戴人体腰部辅助外骨骼负重时的肌电图值;T为受试者不穿戴人体腰部辅助外骨骼负重时的肌电图值。
根据初步统计分析,左右肌肉的肌电图信号没有明显差异,因此将左右肌肉的肌电图数据汇总,然后取平均值。试验肌电图如图12所示。
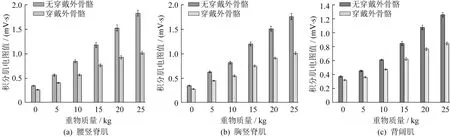
图12 试验肌电图
试验数据统计见表2,可以看出在人体腰部辅助外骨骼的帮助下,明显减少了竖脊肌的活动。当受试者穿戴人体腰部辅助外骨骼搬运重物时,腰竖脊肌、胸竖脊肌、背阔肌的平均积分肌电图值依次减小34.5%,33.9%、24.2%。当受试者穿戴人体腰部辅助外骨骼搬运相同质量的重物时,腰竖脊肌和胸竖脊肌的积分肌电图值减小速度要比背阔肌大。随着重物质量的增大,竖脊肌的肌肉活动逐渐增加。试验结果表明,人体腰部辅助外骨骼可以减轻肌肉疲劳,帮助减轻劳动者长期工作的负担和背部疼痛,并减少腰肌劳损。
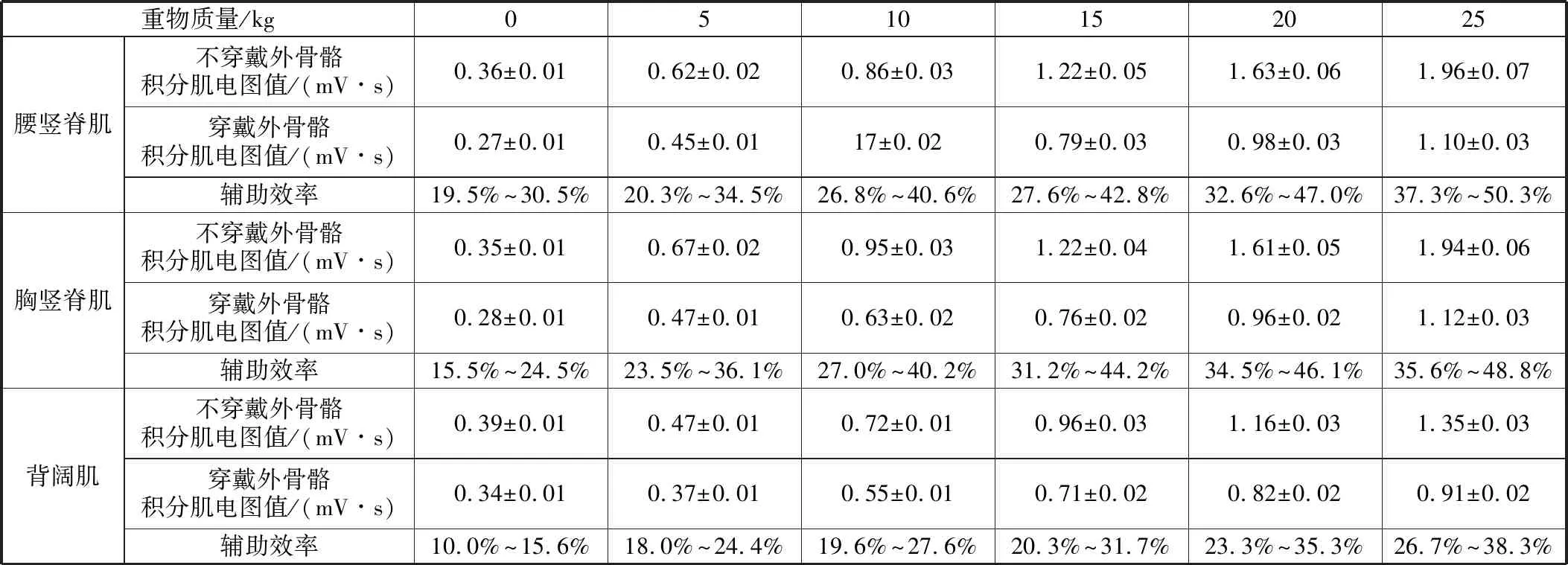
表2 试验数据统计
8 运动特征对比
人体腰部辅助外骨骼运动特征对比如图13所示。人体腰部辅助外骨骼可以根据不同劳动者的初始状态生成角度平滑的轨迹,并根据所提出的控制算法完成电机运动。角速度、角加速度初始状态和抬起重物后的仿真、实际值都是0,对比结果表明,基于自适应控制算法的运动轨迹能够满足理论要求,避免运动过程中的冲击。
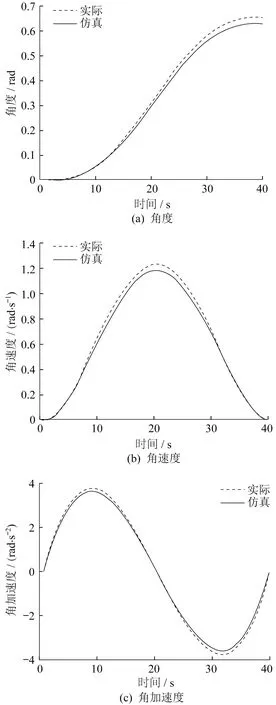
图13 人体腰部辅助外骨骼运动特征对比
9 结束语
笔者对人体腰部辅助外骨骼进行机械结构设计,对外骨骼的关键部位进行有限元分析,为外骨骼选材提供了理论依据。
将人体抬起重物过程简化为坐标连杆模型,采用欧拉拉格朗日方程建立系统动力学模型,为设计控制方法提供了理论基础。
针对建立的动力学模型,提出一种基于自适应算法的人体腰部辅助外骨骼控制方法。
通过试验,穿戴人体腰部辅助外骨骼搬运25 kg重物,与不穿戴相比,对于腰竖脊肌、胸竖脊肌、背阔肌辅助效率依次为37.3%~50.3%、35.6%~48.8%、26.7%~38.3%。
试验表明,穿戴人体腰部辅助外骨骼能够有效减轻劳动者的肌肉疲劳。
借助MATLAB软件强大的数学分析能力,对提出的控制方法进行轨迹规划,并通过受试者搬运重物过程与仿真结果对比,确认具有良好的人机相容性。
