基于VMD-ICA 的水下激光雷达抗散射信号处理方法*
2024-05-13李朝锋王振刘欣宇杨苏辉徐震樊超阳
李朝锋 王振 刘欣宇 杨苏辉† 徐震 樊超阳
1) (北京理工大学光电学院,北京 100081)
2) (中国电子科技集团公司第三十四研究所,桂林 541000)
提出一种基于变分模态分解(VMD)与独立元分析(ICA)相结合的水下信号处理方法.该方法运用VMD将一组回波信号分解为多组按照频率高低顺序排列的本征模态信号.然后,将这些模态信号作为ICA 的观测矩阵,以确保分离所得目标回波信号的完整性.该方法提出将分解所得的各层模态信号与原信号进行相关性和信杂比比较,以确定其分解层数.应用ICA 方法对散射与目标回波进行分离,从而恢复强散射水体中的微弱目标回波,大大提高其测距精度.进行不同衰减长度水体的532 nm 调频连续光水下测距实验.经实验验证,该信号处理方法在激光输出功率2.3 W 时,成功实现对9 个衰减长度内目标的测量,使用算法将测距精度由16 cm 提升至5 cm 以内.
1 引言
激光雷达系统与声纳系统相比,其最显著的优势为更高的空间分辨率和更灵活的平台.然而,由于激光束在水中的严重衰减,激光雷达的探测距离远不如声纳系统.水体的光学衰减包括吸收和散射.通过使用波长为480—540 nm 的激光束可以大大降低吸收,故水体散射为水下激光探测带来了更大的挑战.经验模态分解(empirical mode decomposition,EMD)[1-4]为一种常见的降噪方法.该方法为Huang等[5]于1998 年提出一种自适应时频信号处理方法.EMD 方法将待测信号视为由多个时间尺度的振荡波列构成[6],并从中逐级分离出带有这些尺度的振荡分量(IMFs)以得到待测信号的多尺度振荡特征.但该方法存在边界效应及模态混叠现象[7],导致EMD 分解结果具有不稳定性和非唯一性.变分模态分解 (variational mode decomposition,VMD)[8-11]是一种新型非递归的信号分解方法,该方法通过迭代搜寻变分模型最优解的方式来确定每个分量的频率中心及带宽,成功实现将模态分量与回波信号频带相关联,以弥补EMD 过程中模态混叠的不足.目前,VMD 已被广泛应用于脑肌信号分析[12]和故障诊断[13].对于浑浊水体而言,散射与目标之间的频带差异不明显,VMD很难滤除同一模态分量下的散射,从而限制了其测距精度.为了解决此问题,我们提出一种将盲源分离(blind source separation,BSS)技术[14-17]与VMD相结合的方法,用于分离散射杂波与目标回波.
BSS 技术为一类重要的信号处理方法.它在许多领域都有广泛的应用,如无线通信、声纳、生物医学、光纤通信和神经网络[18-21].它可以在没有源信号和信号混合参数先验知识的情况下将源信号从混合观测中分离出来.独立元分析(independent component analysis,ICA)是实现BSS 的重要算法.它基于这样一个假设,即混合信号相互独立,ICA利用各个分量的统计特性差异,通过迭代算法将各个独立信源进行分离.本文提出的反馈式VMDICA 方法[22-25]通过频谱反馈确定分解层数,进一步降低其冗余性,从而提升其运算速度.通过在水中加入不同含量的 Mg(OH)2(氢氧化镁)模拟不同浑浊程度的海水,探究上述算法的有效性.实验验证,VMD-ICA 信号处理方法在 9 个衰减长度内,测距精度为 5 cm 以内.
2 VMD-ICA 算法
VMD是由Dragomiretskiy 和Zosso 于2014年提出的一种新型非递归的信号分解方法[8],VMD方法以变分思想进行模态估计,其通过在频率内不断搜索约束变分模型的最优解实现将信号自适应分解为各模态及其中心频率,最后各模态经傅里叶逆变换到时域.对于水下调频连续激光雷达回波信号而言,VMD 可将回波信号X(t) 分解为k个具有有限带宽uk(t) 的模式信号Pk(t),各个模式信号均含有相应的频带中心ωk(t),其约束条件为各个Pk(t)之和等于待分离的回波信号X(t),且每个模态分量的估计带宽之和最小,即
水下激光雷达回波VMD 分解过程如图1 所示.

图1 VMD 分解过程Fig.1.VMD decomposition process.
该方法可将目标信号从具有调制频带特性的模式中提取出来,并滤除其余频带模式的散射分量.但对混叠于其模式带宽内的散射杂波,该方法难以分离散射与信号.故我们提出将VMD 与ICA方法相结合的信号处理方法,将VMD 分解所得模式信号Pk(t)={P3(t),P4(t),P5(t),P6(t)}作为ICA的输入矩阵,构建ICA 的观测矩阵X(ω,t) :
其中,S是源矩阵 (Y×M),它由要分离的独立分量组成;A为“混合”矩阵(N×Y).A中的行数是独立观测值N的数量,列数是源矩阵Y的数量.源矩阵S的行数对应源信号数目,每列对应一组观测数据.为了从观测矩阵X(ω,t) 中获得有效的信号源矩阵S.采用峰度等统计学方法度量其高斯性,计算相应的“权重矩阵”的最大值:
一旦算法收敛,就可以成功地分离出信号源,并且可以表达对信号的估计:
在实际应用中,为了提升运算速度及降低数据的冗余性,对VMD 各层分解结果进行频谱成分分析,计算各层模态分量IMF 与参考信号的相关系数和信杂比SCR=10 log(Ssignal/Ssca),Ssignal为各层模态信号中目标回波强度,Ssca为各层模态信号中散射杂波平均强度.选取模态分量IMF 中相关系数和信杂比均为最大值的模态,该模态分量对应的分解层数作为VMD 的分解层数上限.然后,将各层分解的所有IMF 结果与原信号作为独立元分析(ICA)的观测矩阵,以确保分离所得目标回波信号的完整性.
3 水下目标测距实验
光源为实验室自制的射频(RF)强度调制532 nm 激光器[26].1064 nm RF 信号源(Siglent,SSG3021)经电光调制器(EOM)调制后,可输出调制频率10 MHz 到2.1 GHz 的强度调制连续激光.调制后的激光经两级掺钇光纤放大器(YDFA)放大并输入 MgO:PPLN 非线性晶体倍频输出532 nm 激光,其最大输出功率为2.56 W,调制深度为 0.76.实验系统如图2 所示,将强度调制连续激光经过准直后入射到3 m 长的水箱中,准直光斑直径约 1 mm,发散角约0.5 mrad.水中目标为反射率约0.8 的玻璃板,反射信号被直径2 in (1 in=2.54 cm)、焦距75 mm 的透镜接收后聚焦到APD探测器上.APD 探测器接收的回波信号与信号发生器输出的参考信号,输入到示波器.通过加入Mg(OH)2粉末改变水体浊度,并用水泵来循环一段时间,使其浑浊程度分布均匀.
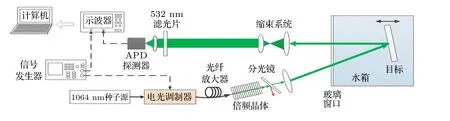
图2 激光水下探测光学系统Fig.2.Laser underwater detection optical system.
对探测信号与参考信号进行互相关运算,以获得目标测距信息.目标位置由互相关运算结果的最大值位置来确定.为了确定目标对应距离,首先确定水箱玻璃入射窗口位置,对入射窗口回波和参考信号进行100 次互相关运算,并以其平均值作为入射窗位置,将此值视为原点.该系统测距误差为1.5 cm.
图3 为衰减系数4.0 m-1时,APD 探测器检测到的镜面目标回波信号波形、对应频谱及VMDICA 方法处理结果.我们使用的APD 探测器的放大器模块具有500 MHz 的带宽.因此,将激光器的调制频率上限设置为500 MHz.图3(a)为入射窗回波信号(基准),图3(b)为其对应的快速傅里叶变换(fast Fourier transform,FFT)频谱,该回波信号频谱主要集中于中心频率为500 MHz 的调制频带内.图3(c)为1.5 m 处镜面目标回波信号,图3(d)为其对应的FFT 频谱.在图3(c),(d)中,能发现该调频连续光回波因水中散射光影响,出现多个较强的频带杂波干扰并将原本调制频带展宽.图3(e)—(l)为对回波信号进行变分模态分解结果及其逆傅里叶变换时域波形,可以发现经两层变分模态分解后,第2 层模态分解信号中IMF3 的信杂比以及其与参考回波信号的相关系数均高于其余模态 (IMF1,IMF2,IMF4).该结果表明变分模态分解已达其分解上限,其分解层数为2.以图3(i)—(l)中VMD分解结果构建ICA 分离的输入矩阵,其分离结果中信号部分及对应FFT 频谱如图3(m),(n)所示.在图3(m),(n)中,发现经VMD-ICA 方法处理后,散射杂波在多数频带分布明显减弱;相应地,回波信号的调制频带展宽效应大幅降低.该信号处理方法实质为自适应带通与独立性统计联合探测.VMD为一种具有带通特性的模式分解,可去除与调制频带差异较大的散射杂波(<200 MHz);但对于相邻频带以及同一通带内的散射杂波,仅以提升分解层数的方式难以较好滤除.故我们将VMD 方法与独立元分析相结合,以目标信号与散射在统计独立方面差异,实现此部分回波中散射与信号的分离.
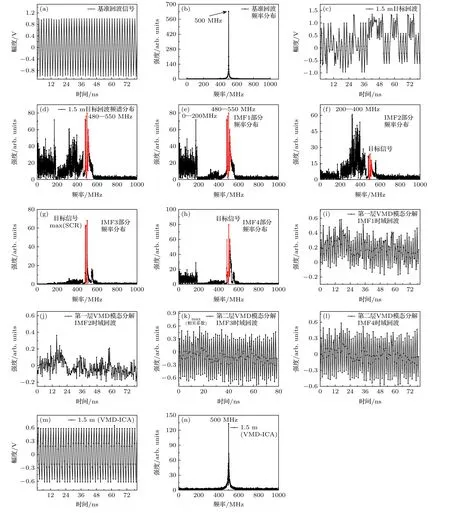
图3 镜面目标回波信号波形对应频谱能量分布及VMD-ICA 方法处理结果(a),(b)入射窗回波信号(基准)及其对应的FFT 频谱;(c),(d) 1.5 m 处镜面目标回波信号及其对应的FFT 频谱;(e)—(l)回波信号的变分模态分解结果及其逆傅里叶变换时域波形;(m),(n) ICA 处理结果(信号部分)及对应FFT 频谱Fig.3.Spectral energy distribution corresponding to the waveform of mirror target echo signal and the processing results of VMDICA method: (a),(b) The reference signal and the corresponding FFT spectrum;(c),(d) mirror target echo and the corresponding FFT spectrum at 1.5 m;(e)-(l) spectra of IMFs of VMD and the corresponding inverse Fourier transform in time domain;(m),(n) the result of ICA (target echo) and the corresponding FFT spectrum.
基于 VMD-ICA 测距方法的整体测距结果如图4(a)—(c)所示.在输出功率为2.3 W 以及采用APD 探测器探测,调制频率为500 MHz 下,其最远探测距离为9 个衰减长度.测距精度使用均方根(RMS)来衡量可得该测距方法在9 个衰减长度内测距精度小于5 cm.
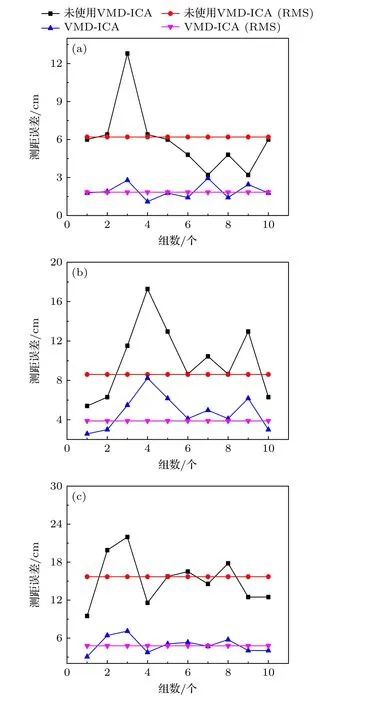
图4 对于衰减长度不同的水体,VMD-ICA 方法测量的测量误差以及均方根(a) 衰减长度为3;(b) 衰减长度为6;(c)衰减长度为9Fig.4.Measurement errors and root mean square of the distance measurement method for water bodies with attenuation lengths of (a) 3,(b) 6,(c) 9 based on VMD-ICA ranging results.
4 结论
本文提出一种基于VMD 与ICA 相结合的水下信号处理方法.针对水下激光雷达回波中复杂的时频混叠问题,该方法运用VMD 将一组回波信号分解为多组按照其频率高低顺序排列的本征模态信号.然后,将这些模态信号作为ICA 的观测矩阵,应用ICA 方法特有的统计学思想对散射与目标回波进行分离,从而恢复强散射水体中的微弱目标回波,大大提高其测距精度.经实验验证,该信号处理方法在532 nm 调频连续光输出功率2.3 W内,成功实现对9 个衰减长度内目标的准确测量,其测距精度由16 cm 提升至5 cm 以内.