基于拓展傅里叶水电机组轴系参数敏感性研究
2024-05-12刘姮
刘 姮
(国网白银供电公司,甘肃 白银 730900)
随着我国社会与经济的快速发展,水力发电行业也取得了飞速的进步。水轮发电机组的单机容量日益增大,且随着能源结构的改变,水电机组与风电、光伏等新能源的多能互补运行成为重要发展方向。但随之而来的就是由水力、机械、电气和其它各种因素共同耦合引起的机组运行稳定性问题,机组运行失稳会直接影响机组使用寿命与发电质量水平,严重时甚至还会影响水电站的安全运行[1-3]。
水电机组运行工况包括启动、停机、工况转换等过程,特别是在与风电、光伏等新能源互补运行时,工况调节更加频繁,机组在水力、机械和电磁等因素共同作用下,呈现出复杂的动力响应特征,由于这些外部作用因素并不是相互独立的,且不同因素引起的机组部位振动往往是相互耦合的,故将机组作为一个耦合的动态系统进行研究已经成为一种趋势,但其难度和工作量也随之大大增加[4-6]。机组轴系的振动往往是导致水电机组振动事故的主要原因,如导轴承间隙不均匀,大轴弓状回旋导致水轮机密封间隙偏斜,引发水力不平衡;机组轴系的动态响应导致定转子间气隙不均,造成发电机定转子间不平衡磁拉力加大,加剧机组轴系的振动幅值等[7-9]。因此,对水电机组轴系的各个系统参数影响规律进行针对性研究,对掌握机组振动诱发机理和减振避振措施具有重要意义。
本文以水轮发电机组轴系系统为研究对象,考虑不平衡磁拉力、非线性油膜力和碰摩力对转子轴承系统的耦合作用,并利用扩展傅里叶敏感性分析方法进行机组轴系系统参数敏感性分析,得出轴系系统参数对其运行稳定性的影响规律。
1 轴系外激励模型
1.1 不平衡磁拉力
在机组正常运行时,发电机转子在均匀的磁场中旋转,转子径向受均匀的磁拉力影响。若出现水力不平衡、转子质量不平衡或发电机的定转子不圆等因素则会造成定、转子间气隙不均,从而产生不平衡磁拉力。不平衡磁拉力主要作用于发电机转子上,且与转子偏心同向,这会进一步加剧机组的震动。
目前,不平衡磁拉力的求解方法主要分为3 种情况,分别是求解线性解析解、求解非线性解析解和数值计算。其中求解线性解析解由于使用的是线性模型,没有考虑到实际运行中的非线性关系,往往会产生较大的误差。数值计算方法又可分为有限差分法和有限元法,在求解电机内部非线性电磁场时常用这种方法,这种方法的精度非常高,而且考虑的影响因素也非常全面,但计算过程会非常复杂繁琐。求解非线性解析解的方法则刚好介于二者之间,有较好的精度,求解也相对容易。由于在水轮发电机组中不平衡磁拉力引起的机组振动有很强的非线性特性,并且结合实际对于计算精度的要求,通常都选用求解非线性解析解的方法[10]。
如图1 所示,O'表示转子外圆中心,在O-xyz坐标系中,设O'坐标为(X1,Y1),偏心转子气隙可表示为:

图1 发电机偏心转子气隙示意图
式(1)中,δ0表示发电机转子不偏心时的平均气隙宽度,表示发电机转子径向位移,α表示气隙处于x轴夹角,γ表示发电机转子转角。
气隙磁导的级数展开形式可以表示为:
式中,Λn表示气隙磁导的Fourier 系数,具体表示为:
由电机学原理可知,三相同步发电机在空载工况下的气隙基波磁动势为:
式(4)中,Fj表示转子励磁电流的基波磁动势,Fj=kjIj,Ij表示发电机转子的励磁电流,kj表示气隙基波磁动势系数,p表示发电机的磁极对数,ω表示转动频率。
气隙磁密的分布表达式为:
在一般情况下,可将磁密的切向分量忽略不计。假设铁心的磁导无限大,则可将垂直于铁心或空气边界位置的Mɑxwell应力表示为:
将转子表面积分可以得到不平衡磁拉力的解析表达式为:
从式(7)可知,不平衡磁拉力可以分为两个部分:与时间无关部分和与时间相关部分。与时间无关部分的幅值大小为f1,且方向指向气隙最小的位置;与时间相关部分的波动频率是机组转频的二倍,幅值大小分别为f2、f3、f4。当磁极对数p>3 时,只存在与时间无关部分的不平衡磁拉力。对水轮发电机组而言,负载时会改变负载电流和功率因数,但对于不平衡磁拉力的负载与空载时差别并不大。因此,负载时的不平衡磁拉力可用空载磁场时得到的不平衡磁拉力来近似表示。水轮发电机组磁极对数一般较多,当p>3 时,机组不平衡磁拉力的解析表达式如下:
其中Rr表示发电机转子半径,Lr表示转子长度。
1.2 碰摩力模型
工业上为了提高旋转机械的效率,定转子间的间隙设计往往很小,但这也导致有较大几率会产生定转子碰摩现象。碰摩力主要发生在定转子间发生碰撞的情况下,而碰摩可能导致烧瓦现象,严重时更可能造成机组毁坏等破坏性事故,并且碰摩现象可能导致系统响应出现拟周期、混沌、分岔等非线性运动形式。碰摩工况主要有在一段时间内发生碰摩力连续但不光滑的碰摩和忽略碰摩细节,认为碰摩整个过程瞬间完成这两种情况,这两种碰摩过程有着不同的力学机理和力学意义。
目前,对于定转子的碰摩非线性动力学问题主要有两种模型进行处理,包括双线性刚度模型和基于Hertz 接触理论的连续碰摩模型。第一种模型主要针对的是刚体或者非常硬的碰撞体;第二种则有相对较大的应用范围,可以考虑碰撞体的材料和结构等,也可以包含碰撞速度、阻尼和能量损失等信息,但建模过程也会相对更加复杂。由于水轮发电机组的转速相对较低,且定转子质量较大,可在忽略变形的条件下认为其保持刚性,所以在本文中综合考虑,采用双线性刚度模型[11-13]。
如图2 所示,忽略摩擦热效应的影响且认为定子为线性变形,定转子间的摩擦符合库伦定律。当发生碰摩过程,碰摩力可表示为:
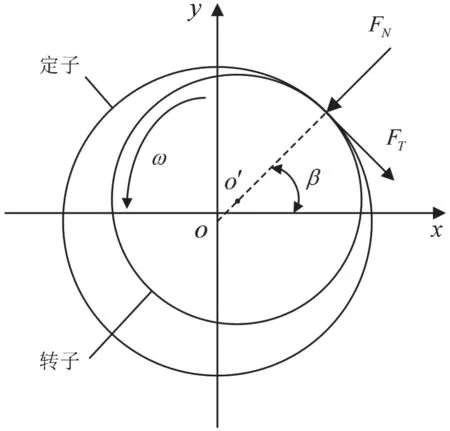
图2 定转子碰摩示意图
式(9)中,FN表示法向碰摩力,FT表示切向摩擦力,β表示径向碰摩角,f表示摩擦系数,kr表示定子径向刚度。
碰摩力在x,y方向的分量可以表示为:
式(10)中,H表示Heɑviside函数,且
1.3 非线性油膜力模型
非线性油膜力作用于轴承上,现今常用的非线性油膜力模型主要有Capone 模型、稳态短轴承油膜力模型、稳态长轴承油膜力模型和非稳态短轴承油膜力模型四种。其中第二种和第三种是不考虑瞬态扰动的,在本文中不适用,第四种和第一种相比,收敛性和精度都略有不足,因此,本文在处理非线性油膜力时采用Capone 模型[14-16]。
非线性油膜力的表达式为:
1.4 机组轴系动力学模型
本文研究的水轮发电机组轴系系统结构示意图如图3 所示。水轮发电机组轴系模型由发电机转子和水轮机转轮以及3 个导轴承构成。考虑到机组轴系系统在不平衡磁拉力、非线性油膜力和碰摩力作用下的动力特性较为复杂,本文只考虑轴系的横向振动,并在转子和联轴器为刚性连接情况下进行分析。
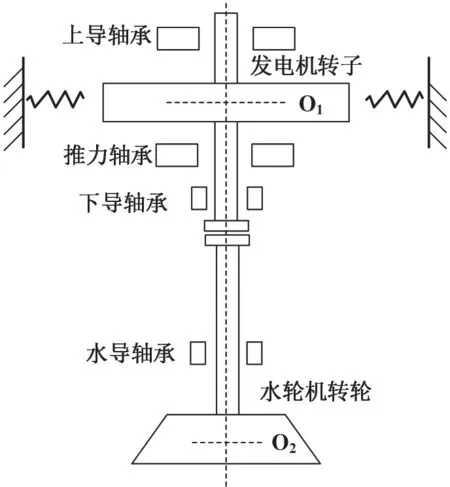
图3 机组轴系系统结构示意图
忽略转轴重量以及转子重心回转体的极惯性距,假设机组转轴两端的刚度均为Ke,上、下导轴承距转子垂直方向距离均为ɑ。通过拉格朗日方程可得水轮发电机组轴系系统的运动微分方程为:
其中,m1、m2分别为转子及轴颈质量,c1、c2分别为转子及轴承处阻尼。X1、Y1为转子的轴心位移,X2、Y2为轴承轴颈位移。
2 敏感性分析方法
在进行机组轴系系统参数的敏感性分析时,首先根据各个系统参数的取值范围,分析系统参数在选定取值范围内的取值变化对机组轴系系统输出响应影响机理。目前,参数敏感性分析方法主要分为两种,一种是局部敏感性分析,即在保持其他给定参数不变的条件下,分析选定的一个参数的变化对系统输出响应的影响规律;另一种是全局敏感性分析,全局敏感性分析方法可以分析多个参数同步变化时,其中一个选定参数和其他参数之间相互作用对系统的输出响应的影响程度[17]。
目前常用的全局敏感性分析方法有3 类,分别为:回归分析法、Sobol 指数分析法、拓展傅里叶敏感性分析法(EFAST)[18-21]。其中,结合了傅里叶幅度敏感性检验法的优势提出来的拓展傅里叶敏感性分析法不但可以分析系统某一个参数变化对输出响应的影响,而且也可以用于多个参数同时变化交互作用时对系统输出响应影响的分析。因此,本章采用拓展傅里叶敏感性分析法(EFAST)对水轮发电机组轴系系统参数进行全局敏感性分析。
EFAST 用的是方差分析的思想,即假定各个输入参数和参数间的相互作用是由模型输出的方差引起的[13,14]。因此可以反映出模型输出响应对于输入参数的敏感性。故可通过模型的方差的分解来获取各个参数和参数相互耦合作用对总方差的影响的占比,称为参数的敏感性指数。参数的敏感性指标可分为单个输入参数对于模型输出响应的影响和多个输入参数间的互相耦合作用对于模型输出响应的影响两大类,我们分别称其为主敏感性指数(Main effect)和总敏感性指数(Total effect)。在采用EFAST进行参数敏感性分析前,需先确定出各个输入参数的取值范围和几何分布。
EFAST 的原理及计算过程如下所示:
首先,在所有待分析参数所组成的多维空间里选择出合适的搜索函数Gi。然后用搜索函数Gi把模型Y=f(x1,x2,…,xn)转化成Y=f(s)。其中搜索函数Gi与输入参数xi的关系如下所示:
上式中,i∈(1,n),n表示不确定输入参数的个数,ωi为搜索频率。
搜索函数Gi的表达式为:
其中,Pi表示输入参数xi的概率密度函数。
对式(14)进行积分和傅里叶变换可得:
其中,输入参数xi通过xj作用耦合方差用Vij表示,输入参数xi通过xj和xk作用的耦合方差用Vijk表示,输入参数xi通过x1,x2,…,xn作用的耦合方差用xn表示。通过归一化处理可获得输入参数xi的一阶敏感性指数Si,Si的表达式为Si=Vi/V,输入参数xi的总敏感性指数STi可以表示为STi=(V-V-i)/V,其中V-i表示不包括参数xi的所有参数方差和。
水轮发电机组轴系系统在运行的过程中会受到水力、机械和电磁等多方面因素互相耦合的影响。本文中挑选出了10 个轴系系统参数来进行敏感性分析,具体参数如表1 所示:机组旋转角速度(ω),转子偏心(e0),励磁电流(Ij),轴承长度(Lb),均匀气隙大小(δ0),转子长度(Lr),轴承半径(Rb),转子半径(Rr),轴承间隙(Cz),定子径向刚度(kr)。
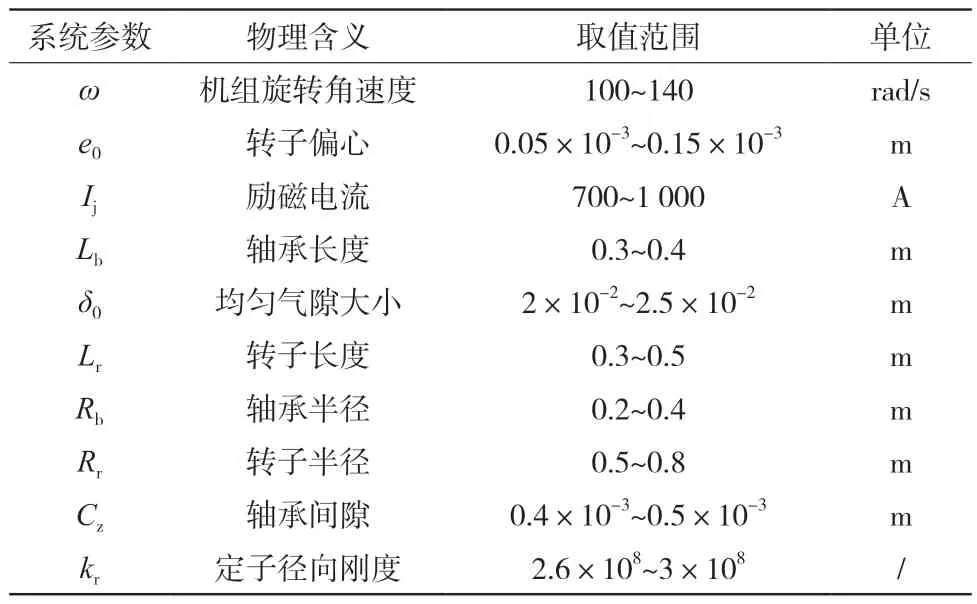
表1 轴系系统参数及其取值范围
研究对象为式(12)中的水轮发电机组轴系系统模型,利用EFAST 分析上述10 个轴系系统参数的变化对轴系系统模型输出响应的敏感性。令e=[x1,x2,x3,x4,x5,x6,x7,x8,x9,x10]为方差函数。其中,[x1,x2,x3,x4,x5,x6,x7,x8,x9,x10]=[ω,e0,Ij,Lb,δ0,Lr,Rb,Rr,Cz,kr]。
令Ns∈(-π,π),其中Ns=2Mωmax+1,M=6,ωmax是ωi的最大值。可得,y=f(x1,x2,…,x10)可以转化为y=f(s)。
对函数f(s)进行傅里叶变换可得到:
首先给输入参数xi分配一个较大的频率ωi,然后再给其他输入参数分配一组较小频率{ωi},且参数频率满足ωi≥2M·max{ωi}。然后将频域分为[1,M.max({ωi})]和[M.max{ωi}+1,(Ns-1)/2]两部分。由此可得,输入参数xi的总敏感性指数的计算公式如下所示:
3 轴系系统参数敏感性分析
3.1 转子X/Y 轴方向参数敏感性分析
假设水轮发电机组轴系系统模型的输入参数分布规律均为正态分布的假设,且根据模型机制通过尺度比例设置输入参数方差。轴系系统模型输出响应包含了转子在X方向和Y方向的位移(X1,Y1)以及轴颈在X方向和Y方向的位移(X2,Y2)。输入参数xi采用Monte Carlo 方法来采样,采样次数设为5 000 次。使用上述条件来计算,我们可以得出水轮发电机组轴系系统的10 个输入参数对转子X/Y 轴方向输出响应的敏感性指数如图4 所示。
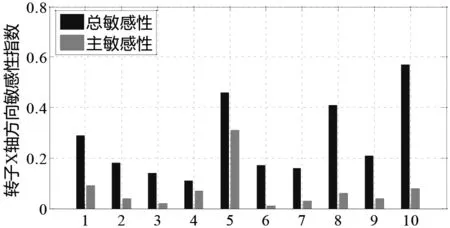
图4 轴系系统参数对转子X 轴方向位移敏感性指数
由图4 可得转子X 轴方向位移的主敏感性和总敏感性分析结果。当以转子X 轴方向位移为水轮发电机组轴系系统模型的输出响应时,轴系系统参数主敏感性指数排名前4 分别为均匀气隙大小(δ0)、机组旋转角速度(ω)、定子径向刚度(kr)、轴承长度(Lb),他们的平均值分别为0.31、0.09、0.08 和0.07,其他轴系系统参数的主敏感性指数均小于0.05。说明在这10 个轴系系统参数中,这4 个轴系系统参数对转子X 轴方向位移的动态输出响应的直接影响最为显著,而其他6 个轴系系统参数的主敏感性指数均较小,表明这些系统参数对转子X 轴方向位移影响较弱。另一方面,可得轴系系统参数的总敏感性指数排名前4 的分别为定子径向刚度(kr),均匀气隙大小(δ0),转子半径(Rr),机组旋转角速度(ω),他们的平均值分别为0.57、0.46、0.41 和0.29,其他6 个轴系系统参数的总敏感性指数均小于0.20,说明这4 个轴系系统参数与其他参数相互间作用时对转子X 轴方向的位移输出响应有比较显著的影响。
综上所述,均匀气隙大小(δ0)、机组旋转角速度(ω)和定子径向刚度(kr)这3 个系统参数单独变化时会对转子X 轴方向位移响应产生较大影响,其中均匀气隙大小(δ0)对转子X 轴方向位移响应影响最为显著;当机组轴系系统在多个参数同时变化时,定子径向刚度(kr)、均匀气隙大小(δ0)、转子半径(Rr)和机组旋转角速度(ω)这4 个系统参数可以通过参数间相互作用而对转子X轴方向位移响应产生较大影响,其中定子径向刚度(kr)产生的参数间相互作用最强。
由图5 可得转子Y 轴方向位移的主敏感性和总敏感性分析结果。当以转子Y 轴方向位移为水轮发电机组轴系系统模型的输出响应时,轴系系统参数主敏感性指数排名前2 位分别为转子偏心(e0)和均匀气隙大小(δ0),他们的平均值分别为0.89和0.06,其他轴系系统参数的主敏感性指数均小于0.01。说明在这10 个轴系系统参数中,这2 个轴系系统参数对转子Y 轴方向位移的动态输出响应直接影响最为显著,而其他8 个轴系系统参数的主敏感性指数均较小,表明这些系统参数对转子X 轴方向位移影响较弱。另一方面,可得轴系系统参数的总敏感性指数排名前2 位的仍为转子偏心(e0)和均匀气隙大小(δ0),平均值分别为0.92 和0.08,其他8个轴系系统参数的总敏感性指数均小于0.03,说明这2 个轴系系统参数与其他参数相互间作用时对转子Y 轴方向的位移输出响应有比较显著的影响。
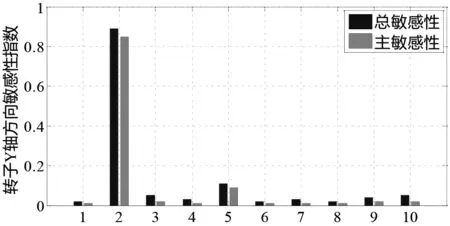
图5 轴系系统参数对转子Y 轴方向位移敏感性指数
综上所述,转子偏心(e0)和均匀气隙大小(δ0)这2 个系统参数单独变化时会对转子Y 轴方向位移响应产生较大影响,其中转子偏心(e0)对转子Y 轴方向位移响应影响最为显著;当机组轴系系统在多个参数同时变化时,也还是转子偏心(e0)和均匀气隙大小(δ0)这2 个系统参数可以通过参数间相互作用而对转子Y 轴方向位移响应产生较大影响,其中转子偏心(e0)产生的参数间相互作用最强。
3.2 轴颈X/Y 轴方向参数敏感性分析
同上所示,带入计算过程,我们可以得到水轮发电机组轴系系统的10 个输入参数对轴颈X/Y 轴方向输出响应的敏感性指数如图6 所示。
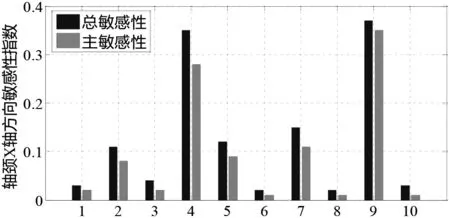
图6 轴系系统参数对轴颈X 轴方向位移敏感性指数
由图6 可得轴颈X 轴方向位移的主敏感性和总敏感性分析结果。当以轴颈X 轴方向位移为水轮发电机组轴系系统模型的输出响应时,轴系系统参数主敏感性指数排名前5 位分别为轴承间距(Cz)、轴承长度(Lb)、轴承半径(Rb)、均匀气隙大小(δ0)和转子偏心(e0),他们的平均值分别为0.35、0.29、0.11、0.06 和0.05,其他轴系系统参数的主敏感性指数均小于0.05。说明在这10 个轴系系统参数中,这5 个轴系系统参数对轴颈X 轴方向位移的动态输出响应的直接影响最为显著,而其他5 个轴系系统参数的主敏感性指数均较小,表明这些系统参数对轴颈X 轴方向位移影响较弱。另一方面,可得轴系系统参数的总敏感性指数排名前5 位的分别为轴承间距(Cz)、轴承长度(Lb)、轴承半径(Rb)、均匀气隙大小(δ0)和转子偏心(e0),他们的平均值分别为0.37、0.33、0.13、0.07 和0.06,其他5 个轴系系统参数的总敏感性指数均小于0.01,说明这5 个轴系系统参数与其他参数相互间作用时对轴颈X 轴方向位移输出响应有比较显著的影响。
综上所述,轴承间距(Cz)、轴承长度(Lb)、轴承半径(Rb)、均匀气隙大小(δ0)和转子偏心(e0)这5 个系统参数单独变化时会对轴颈X 轴方向位移响应产生较大影响,其中轴承间距(Cz)对轴颈X 轴方向位移响应影响最为显著;当机组轴系系统在多个参数同时变化时,仍是上述5 个系统参数可通过参数间相互作用而对轴颈X 轴方向位移响应产生较大影响,其中轴承间距(Cz)产生的参数间相互作用最强。
由图7 可得轴颈Y 轴方向位移的主敏感性和总敏感性分析结果。当以轴颈Y 轴方向位移为水轮发电机组轴系系统模型输出响应时,轴系系统参数主敏感性指数排名前4 位分别为轴承长度(Lb)、轴承间距(Cz)、轴承半径(Rb)和转子偏心(e0),他们的平均值分别为0.51、0.23、0.16 和0.12,其他轴系系统参数的主敏感性指数均小于0.02。说明在这10个轴系系统参数中,这4 个轴系系统参数对轴颈Y轴方向位移的动态输出响应的直接影响最为显著,而其他6 个轴系系统参数的主敏感性指数均较小,表明这些系统参数对轴颈Y 轴方向位移影响较弱。另一方面,可得轴系系统参数的总敏感性指数排名前4 位仍为轴承长度(Lb)、轴承间距(Cz)、轴承半径(Rb)和转子偏心(e0),他们的平均值分别为0.55、0.24、0.18 和0.13,其他6 个轴系系统参数的总敏感性指数均小于0.02,说明这4 个轴系系统参数与其他参数相互间作用时对轴颈Y 轴方向位移输出响应有比较显著的影响。
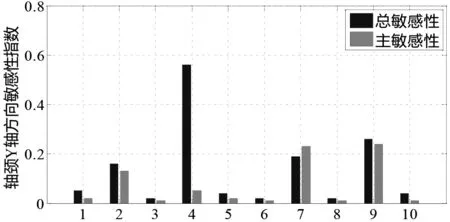
图7 轴系系统参数对轴颈Y 轴方向位移敏感性指数
综上所述,轴承长度(Lb)、轴承间距(Cz)、轴承半径(Rb)和转子偏心(e0)这4 个系统参数单独变化时会对轴颈Y 轴方向位移响应产生较大的影响,其中轴承长度(Lb)对轴颈Y 轴方向位移响应影响最为显著;当机组轴系系统在多个参数同时变化时,仍是上述4 个系统参数可以通过参数间相互作用而对轴颈Y 轴方向位移响应产生较大影响,其中轴承长度(Lb)产生的参数间相互作用最强。
4 结论
为了全面系统地分析机组轴系系统参数对转子中心和轴颈中心横向位移的影响程度,在机组轴系系统动力学模型的基础上,应用拓展傅里叶敏感性分析方法,推导并计算出轴系系统参数的全局敏感性。现将结果总结如下:
(1)基于所建立的水轮发电机组轴系系统动力学模型,通过给出轴系系统10 个模型参数取值范围和分布特征,利用拓展傅里叶敏感性分析方法,对上述10 个系统参数进行了全局敏感性分析,不仅揭示某一参数单一变化时对系统输出影响程度,而且给出了多参数同时变化时参数间相互作用效应对系统输出影响敏感性指数。
(2)均匀气隙大小、机组旋转角速度和定子径向刚度这3 个系统参数单独变化时会对转子X 轴方向位移响应产生较大影响,其中均匀气隙大小对转子X 轴方向位移响应影响最为显著;当机组轴系系统在多个参数同时变化时,定子径向刚度、均匀气隙大小、转子半径和机组旋转角速度这4 个系统参数可以通过参数间相互作用而对转子X 轴方向位移响应产生较大影响,其中定子径向刚度产生的参数间相互作用最强。转子偏心和均匀气隙大小这2 个系统参数单独变化时会对转子Y 轴方向位移响应产生较大影响,其中转子偏心对转子Y 轴方向位移响应影响最为显著;当机组轴系系统在多个参数同时变化时,也还是转子偏心和均匀气隙大小这2 个系统参数可以通过参数间相互作用而对转子Y 轴方向位移响应产生较大影响,其中转子偏心产生的参数间相互作用最强。
(3)轴承间距、轴承长度、轴承半径、均匀气隙大小和转子偏心这5 个系统参数单独变化时会对轴颈X 轴方向位移响应产生较大影响,其中轴承间距对轴颈X 轴方向位移响应影响最为显著;当机组轴系系统在多个参数同时变化时,仍是上述5 个系统参数可通过参数间相互作用而对轴颈X 轴方向位移响应产生较大影响,其中轴承间距产生的参数间相互作用最强。轴承长度、轴承间距、轴承半径和转子偏心这4 个系统参数单独变化时会对轴颈Y 轴方向位移响应产生较大的影响,其中轴承长度对轴颈Y 轴方向位移响应影响最为显著;当机组轴系系统在多个参数同时变化时,仍是上述4 个系统参数可以通过参数间相互作用而对轴颈Y 轴方向位移响应产生较大影响,其中轴承长度产生的参数间相互作用最强。
