基于GNSS双天线测姿的水位监测方法
2024-05-08张朋杰庞治国路京选孙铭涵
张朋杰 庞治国 路京选 江 威 孙铭涵
(1.中国水利水电科学研究院,北京 100038;2.水利部防洪抗旱减灾工程技术研究中心(水旱灾害防御中心),北京 100038)
0 引 言
雨水情监测预报“三道防线”是以流域为单元,由气象卫星和测雨雷达系统、雨量站、水文站组成的雨水情监测预报体系。水位监测是雨水情监测预报“第三道防线”中的重要内容,精确、实时的水位监测在洪涝灾害防御中至关重要,可提前预警并帮助决策者采取紧急措施,以最大程度减少损失,保护人民生命财产安全。传统的水位监测方法主要有两类:接触式方法和非接触式方法,均已广泛应用于实际工程中,但也存在一定局限性。如接触式方法需要与水面直接接触,容易受到污染物或生物附着等影响而造成误差或损坏;非接触式方法需要发射电磁波或声波,可能会对周围环境造成干扰或污染;此外,传统方法通常只能监测单点或局部区域的水位变化,并不能实现大范围或全球范围内的连续监测[1-2]。
全球导航卫星系统(Global Navigation Satellite System,GNSS)不仅向全球用户提供导航、定位及授时服务,还持续向地表发射大量L 波段信号。随着对GNSS 的深入研究,许多学者发现GNSS 反射信号中携带着反射面的特性信息,利用该GNSS反射信号,无需专门的雷达发射机即可实现对反射面物理特性的估计与反演[3],由此也衍生出全球导航卫星系统反射测量(Global Navigation Satellite System-Reflectometry,GNSS-R)这一GNSS 与遥感的交叉学科。GNSS-R 以其特有的优势,为实现高时空分辨率的水位监测提供了一种新思路。1993年Martin-Neir首次提出无源反射测量和干涉测量系统(Passive Reflectometry and Interferometry System,PARIS)概念[4],并指出利用全球定位系统(Global Positioning System,GPS)反射信号进行测高具有可行性,经过20 多年的发展,GNSS-R 测高技术已被证明可用于海洋[5]、湖泊[6]、河流[7]和水库[8]的水位反演。
目前GNSS-R 测高中最常用的方法有3 种。第1 种是码延迟测高(code-delay altimetry),该方法通过直射信号与反射信号的相关峰值所对应的时间得到时间延迟,进而根据时间延迟反演水位。然而,由于GNSS信号的带宽相对较窄,此方法的精度被限制在米级[9]。第2 种是由Kristine 等2013年提出的使用信噪比数据测高的方法,通过处理包含GNSS 直射信号与反射信号干涉信息的信噪比(SNR)数据反演水位[10]。研究表明SNR 数据中的多径振荡频率与天线到反射面的高度有关[11-13]。然而,该方法需要持续记录很长时间,并且只能使用来自低仰角卫星的GNSS信号,因此时间分辨率很低[14]。第3种是载波相位延迟测高,该方法通过直射信号与反射信号的载波相位观测值来确定两者之间的路径延迟[15]。与信噪比分析相比,相位测高不仅可以实现厘米级的海平面高度反演而且具有高时间分辨率[16]。但是当海面粗糙度较大时,反射信号相位的连续性受到影响,使其变得难以跟踪[17]。与复杂的海况相比,内陆水体的水面相对平静,反射信号的特性比较稳定,容易准确测量其相位信息,因此本文的研究是基于载波相位测高技术。
虽然目前GNSS-R 载波相位延迟测高技术可以实现较高精度的水位监测,但其需要较长的时间收集数据,限制了其实时应用的可能性。本研究针对上述问题,开展基于GNSS 双天线测姿的实时水位监测研究,建立利用反射信号解算水位的模型方法,并利用现场实验对该方法进行验证分析,为水位高精度监测提供新的思路。
1 原理和方法
在基于GNSS 双天线测姿的水位监测中,右旋极化(RHCP)天线朝上对天安装,用于接收GNSS卫星直射信号;左旋极化(LHCP)天线朝下对水安装,用于接收水面反射的GNSS信号,两个天线的相位中心在同一条铅垂线上(图1)。
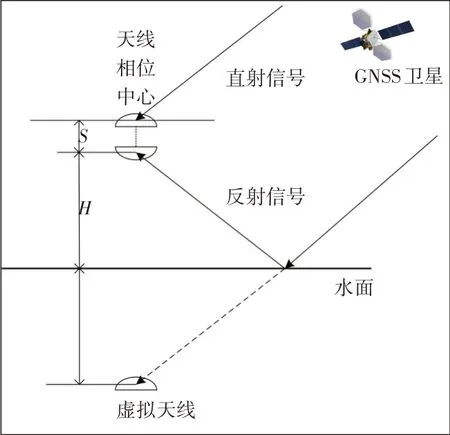
图1 GNSS-R测高几何图
从图1中可以看出对天观测天线与对水观测天线的位置不变。与RHCP 天线接收到的直射信号相比,LHCP 天线接收到的反射信号具有额外的传播路径。因此LHCP 天线也可以看作是位于水面以下的虚拟天线,并且虚拟天线到水面的距离与LHCP 天线到水面的距离相等。当水面高度发生变化时,反射信号的额外传播路径会发生变化,虚拟天线的位置也随之发生变化。因此,可以利用GNSS双天线测姿技术来实时计算RHCP 天线与LHCP 天线之间的基线长度、航向角及俯仰角。
1.1 水面高度计算
通过图1 可以发现,水面高度与两天线之间的基线长度有关,根据几何关系得出:
式中:H为水面高度;Z为对天天线相位中心到水位基准点的距离;M为基线长度;S为对天观测天线与对水观测天线之间的距离。
1.2 基线解算
本方法采用双差观测组合消除观测量中的大部分误差,如卫星轨道、卫星钟差、电离层延迟、对流层延迟、接收机钟差等,其观测方程表示如下:
对式(1)和式(2)进行线性化处理得到如下方程:
式中:y为GNSS 观测值向量,一般包括码观测值和载波相位观测值;A、B分别为设计矩阵;a为整周模糊度向量;b为基线向量;e为观测误差矢量。
按最小二乘准则处理式(4),可得:
式中:Qy为双差载波相位观测值向量的协方差矩阵。
忽略整周模糊度a的整数特性,根据标准的最小二乘方法来解算,以此得到整周模糊度a和其他未知参数b的浮点解(float solution),也称为实数解(real-valued solution),以及它们的协方差矩阵。
载波模糊度具有整数特性,在得到其近似浮点解后,可以采用一定的模糊度固定方法,典型的如LAMBDA 方法,得到对应的整数解,将该整数参数代入前述双差载波观测方程,通过最小二乘法得到基线向量的固定解。
2 现场实验
2.1 实验位置
实验于2023年6月5日在北京市京密引水管理处龙山管理所东沙河站(40°11'25.59″N,116°15'11.55″E)进行。实验场地附近无高大建筑物遮挡、水面较为平静。图2显示了实验期间的设备安装情况,接收机设备放置于机柜内,太阳能供电系统与机柜紧密连接。现场测试数据通过4G 传回监测平台。在设备安装完成后通过钢卷尺测量了天线连接杆到水面的高度10 次,其平均高度为3.03 m。通过水尺获取了同时段水深为1.08 m。最终确定了天线连接杆到水位基准点(水尺底端零点)的高度为4.11 m。
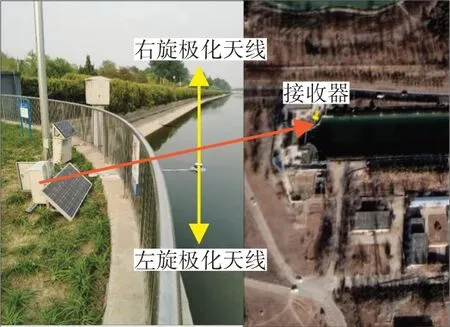
图2 GNSS-R实验设备
在实验中采用对天安装的右旋极化天线(RHCP)接收直射信号,采用对水安装的左旋极化天线(LHCP)接收反射信号。图3显示了实验场地水尺的位置。为了比较和验证实验结果,使用站点工作人员每日7:30、15:30、18:30 通过水尺读取的水位数据。

图3 水尺位置
2.2 实验设备
实验所用的接收机由中国水利水电科学研究院和上海司南卫星导航技术股份有限公司联合研发,支持北斗全球信号及当前主流全球卫星导航系统。实验期间,接收机以1 Hz的时间分辨率记录两天线之间的基线长度。
图4(a)为本次实验所使用的天线,在对天观测天线和对水观测天线连接轴的中点设置信号遮挡隔板。信号遮挡隔板上附着吸波材料,且信号遮挡隔板在对天观测天线和对水观测天线上的投影面积大于对应天线的面积,该挡板可以减少向上对天观测天线被水面反射的卫星信号影响,减少向下对水观测天线左旋极化天线被卫星直射信号影响(图4(b))。
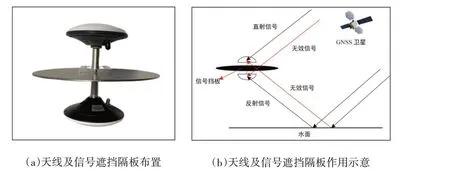
图4 实验所用天线及信号遮挡隔板
3 实验结果
通过实验获得了2023年6月5日至7月10日期间时间间隔为1 s 的水位数据,然后选取了通过水尺读数获取的水位数据来验证实验结果的准确性。然而站点的工作人员在记录水位数据时并没有记录准确的时间。为了减少因时间不同步带来的误差,选取每日7:25—7:35、15:25—15:35、18:25—18:35的水位数据进行滑动平均滤波处理,取其平均值作为对应时刻的水位数据。
图5 将2023 年6 月5 日至7 月10 日实验获得的GNSSR 数据(红色折线)与水尺数据(蓝色折线)绘制到一起,可以发现,二者变化趋势基本一致。2023 年6 月5 日至7 月10 日两组数据之间的均方根误差为2.88 cm。

图5 2023年6月5日至7月10日的水位变化
图6 为实验期间GNSS-R 数据与水尺数据的相关性分析,可以看出两个时间段内的GNSS-R 数据与水尺数据相关性较好,相关系数为0.91,结果表明基于GNSS 双天线测姿的水位监测方法可以实现厘米级精度的水位监测。
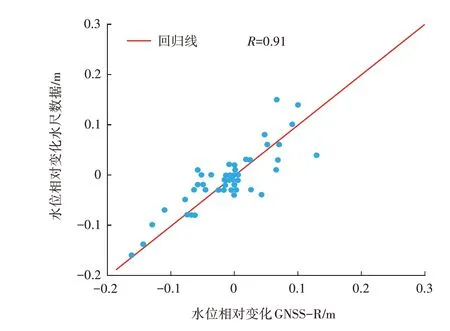
图6 GNSS-R数据和水尺数据相关性分析
当水位变化幅度较大时,监测结果的误差也会增大。经初步分析,认为是由获得水尺数据的时间和获得GNSSR 数据的时间不同步造成的。一方面是因为水面高度是连续上升或连续下降的,水尺数据记录的是某一时刻的水面高度,而GNSS-R 数据是10 min 内的平均水面高度,所以当水位变化幅度较大时,GNSS-R 数据与水尺数据之间的误差也会增加。另一方面是因为多路径效应的影响。GNSS信号在传播过程中会被测站附近的反射物所反射,反射信号进入接收天线,会和直射信号产生干涉叠加,导致观测结果与真值产生偏差,这种由于信号在多条路径上传播所引起的干涉时延效应称为多路径效应。当水面平静时由多路径效应产生的误差较小,但是当水位变化幅度较大时,水面的波浪运动会导致GNSS 信号发生多次反射,从而使多路径误差增加。
4 结 论
本文提出了一种基于GNSS 双天线测姿的水位监测方法。该方法通过使用1台支持双天线的接收机来实施作业,天线分为对天观测天线和对水观测天线,两根天线距离较短(一般大于0.1 m,小于10 m),从而构成短基线。该方法采用了双差观测组合,即主从天线之间做一次差分,卫星间做一次差分,在短基线条件下,经过双差组合后,观测量中的大部分误差,如卫星轨道、卫星钟差、电离层延迟、对流层延迟、接收机钟差等都被消除,并通过LAMDA 方法求解整周模糊度后获得两天线间基线长度,进而计算出水面高度。同时在LHCP 天线和RHCP 天线的连接处安装了信号遮挡隔板,这样可以减少水面反射信号对右旋极化天线的影响,减少卫星直射信号对左旋极化天线的影响。通过实验获得了2023 年6 月5 日至7 月10 日时间间隔为1 s 的水位数据。与通过水尺读数获取的水位数据相比,该方法在平静水面的条件下可以实现长时间的实时水位监测,并可以达到厘米级的精度,其均方根误差为2.88 cm。
多路径误差是载波相位姿态测量的主要误差源之一,其理论最大值是载波波长的1/4。由于在水位测量中LHCP天线接收的是来自水面的反射信号,因此多路径效应是影响水位测量精度的主要原因。当电磁波信号在水面上反射时,会被水面的起伏、凸凹处和不规则形状所影响,从而在传播过程中发生反射、折射和绕射等现象,进而导致信号在传播过程中经历多条不同路径,从而产生多路径效应。如果要实现毫米级的测量精度,必须减少多路径效应带来的误差。由于多路径的形式复杂,未来考虑引入多路径简化模型,模拟实际环境试验,仿真多路径效应对基线向量解算带来的影响。
