基于无人机航空摄影测量的重点区域耕地保护监管方法
2024-04-25冯彦彦
冯彦彦
(南京霖和智慧科技有限公司,江苏 南京 210039)
在当前以城镇化、生态文明、乡村振兴为重点的时代背景下,耕地保护面临着新形势、新挑战[1]。为全面贯彻落实国务院办公厅《关于坚决制止耕地“非农化”行为的通知》《关于防止耕地制止耕地“非粮化”稳定粮食生产意见》等文件要求,经由国土变更调查、土地卫片执法、耕地保护督察等工作发现,耕地“非农化”“非粮化”问题依然突出,如何破解成为亟待解决的重要难题[2-3]。耕地保护监测技术是有效实施耕地“非农化”“非粮化”执法监察工作的重要前提,但现有单一监测模式或多种监测模式融合的途径难以平衡投入成本与监测成效,难以满足耕地“非农化”“非粮化”监测的“全要素、实时化、便捷化”需求,出现“发现难、制止难、查处难”的困境[4-5]。随着技术的发展,无人机航空摄影测量技术因其高效性、灵活性和高分辨率的优点,被认为是一种有潜力的替代方案。无人机能够提供更为详细和频繁的数据,有助于及时发现和响应耕地非法使用的情况。本文通过整合无人机技术,服务各类耕地“非粮化、非农化”现象监测,以保障粮食安全,为农业生产和土地管理提供坚实的基础。
1 非农化和非粮化的内涵界定
农业的范围比较大,包括粮食种植、林业种植、果蔬种植、水产养殖和畜禽养殖及一些杂粮种植等。关于“非农化”的内涵,学者们从地域、权属、产业和用途等层面给予了多维度的界定,包括农地地域由农村向城市转移、经济不同产业部门间转移、权属由农村集体所有向国家土地所有权变更、用途由农地向居住、交通、工业、服务业等建设用地转换,其核心是农用地向建设用地的用途转换,权属性质变更在总量上占据优势。“非粮化”一词最早出现在20 世纪90 年代中期,对耕地“非粮化”进行内涵界定的相关研究虽未形成系统,但仍然取得了一定的研究成果,即“非粮化”更加严格地细化了粮食种植的政策,特指小麦、水稻和玉米这三大主粮以外的种植,也就是说土地在确保这三大主粮的种植面积后,才能种植棉花、大豆、花生或其他杂粮和经济作物,不可以用来种树、挖塘、建厂房、养殖设施等非粮食作物。
2 航测技术路线
正射影像数据采集按照标准作业流程操作,具体包括如下步骤:第一步,收集试验区相关资料,包括试验区边界、禁飞区、天气资料等;第二步,根据试验区范围、数据分辨率、数据定位精度设计无人机航飞参数;第三步,放飞无人机,采集正射影像数据;第四步,空三加密,正射影像制作,匀光匀色,提供最终成果。
首先,进行飞行计划的设计,确定航线方向和重叠度,以保证后续数据处理的准确性。其次,进行摄像机校准,包括内外部参数的校准,以确保数据采集的准确性,同时进行数据质量控制,监控数据采集过程中的相机高度和姿态信息,以避免数据模糊或重叠不足等问题。再次,对采集到的数据进行处理,包括地面校正、DEM 和DOM 的输出,以及建筑物轮廓的提取等。最后,在输出最终成果之前,需要进行数据质量的检查和评估,确保空点云配准的精度。
3 无人机航空摄影测量关键技术
摄影测量领域的核心任务在于解析照片以获取被拍摄物体的空间数据。这一过程首先需要确立照片中的影像点与其相应的地面点之间的数学联系。对于那些以单一投影中心进行中心投影的航空和近景摄影测量,这种模型通常是通过共线条件方程来实现的。而在处理多个投影中心的航天线阵推扫式照片时,则通常使用有理函数模型来描述影像点与实际地面点之间的空间坐标关系。无人机航空航空摄影测量的共线条件方程,表示了像点与相应的地面点间的几何关系。
共线条件方程在无人机航空摄影测量中扮演着重要的角色。它是将影像上的像点与相机位置、姿态、内部几何参数等进行关联的数学公式。通过这些公式,可以解算出物点的三维坐标,实现对地面的三维测量和建模。首先,确定相机的内部几何参数。相机的内部几何参数包括焦距、主点位置、像点尺寸和畸变参数等。这些参数能描述相机内部的光学特性,对影像的成像过程起着重要作用,它们以矩阵形式进行表示,其中包括像点坐标与物方坐标之间的关系。其次,考虑相机的外部定向元素。外部定向元素包括相机在摄影平面的投影位置、摄影平面与物方坐标系之间的旋转角度和相机的位置等。这些参数描述了相机在空间中的姿态和位置,用于将像点和物点进行关联。基于这些参数,可以建立共线条件方程。共线条件方程基于几何光学原理,将像点在影像上的坐标与相机的内外部参数联系起来。在建立过程中,通常采用像高方程和像平面方程来描述像点的投影关系。其中,像高方程描述了影像上点的垂直距离与相机内部参数(如焦距和主点位置)及物方坐标之间的关系,它是通过像点的行列号和相机的内部参数计算得到的。像平面方程描述了影像上点的水平坐标与相机内外部参数以及物方坐标之间的关系,它是通过像点的行列号、相机的外部参数和内部参数计算得到的。通过解算共线条件方程,可以推导出物点的三维坐标。这一过程通常使用最小二乘法来求解,以降低因测量误差和系统噪声而引起的不确定性。最终,能获得物点的空间位置信息,实现对地面的精确测量和建模。
4 试验与分析
本文于如皋市开展正射影像采集试验,验证基于无人机的耕地动态监测模式。根据正射影像采集方法,针对试验区域设计无人机数据采集方式,记录无人机飞行时长、电池用量、数据精度等参数,为分析无人机监测耕地“非农化”“非粮化”成本与可行性奠定基础。
4.1 硬件准备
本次采集试验基于自然资源领域主流应用的无人机型号,考虑续航时长、相机参数等硬件信息,采用大疆御3C 和大疆御3E 两款不同级别无人机开展数据采集工作,无人机具体参数对比如表1所示。正射影像数据采集时,无人机飞行高度240 m,飞行速度15 m/s,数据采集分辨率为6 cm。考虑无人机搬迁、信号传输、飞行速度等因素影响,拍摄用时80 min。
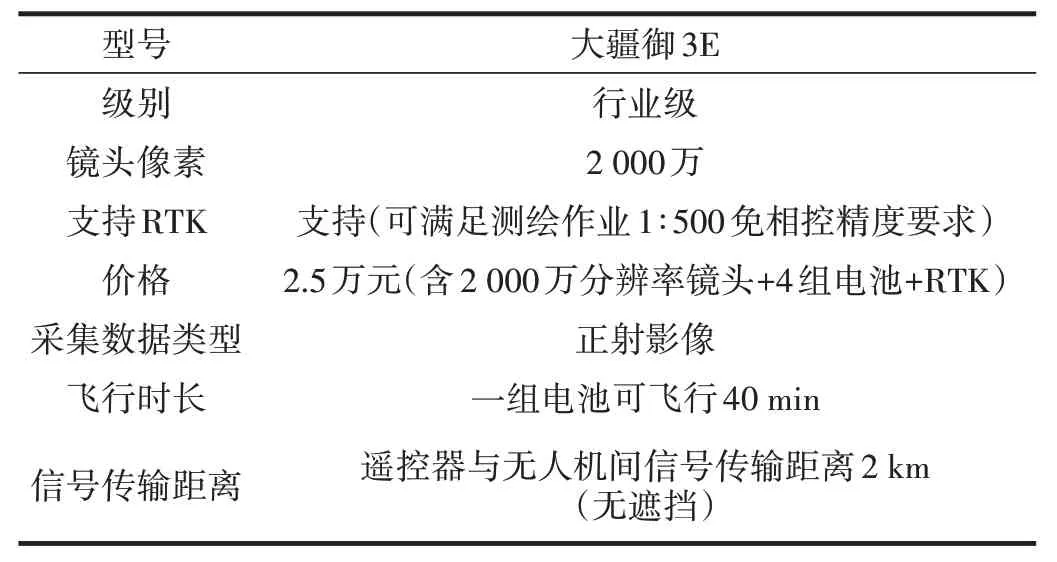
表1 无人机参数对比表Tab.1 UAV parameter comparison table
4.2 结果分析
基于2021 年土地变更调查数据,分析发现试验区中存在疑似“非农化”现象。从正射影像中均可发现耕地图斑中出现推土现象,原耕地图斑已被平整为硬化地面,同时堆放工程器械、水泥筒等建设行为目标,如图1所示。
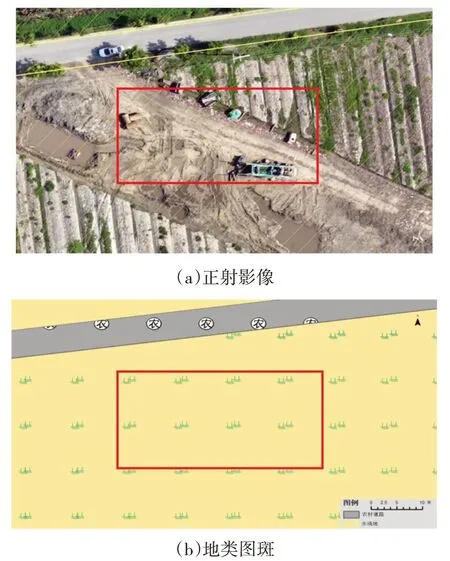
图1 疑似“非农化”现象对比图Fig.1 Comparison of suspected"non-agricultural"phenomena
开展疑似“非粮化”现象分析,试验区主要农作物包括水稻、小麦、玉米、油菜等。无人机数据采集时间为7月中旬,因此,试验区耕地中主要农作物为水稻、玉米、黄豆和花生。水稻和玉米为主要粮食作物,黄豆和花生为油量作物,本次分析缺少基本农田范围图斑,无法进行“非粮化”判定。通过无人机照片和正射影像对水稻、黄豆、花生、玉米进行比对,可以正射影像中区分出各植被范围。由于水稻田中有水存在,正射影像能在耕地中发现水体。由于当前水稻还未长成,作物之间距离较大,且种植比较整齐,可以通过以上特征判断水稻的种植范围。由此可以证明,无人机高分辨率数据相较于卫星遥感影像具有显著分辨率高和纹理清晰度高优势,对发现“非粮化”中的苗圃具有重要价值。基于如皋实验村庄开展正射影像采集试验,利用无人机遥感监测灵活性高、分辨率高的优点,验证了基于无人机航空摄影测量能够消除监测盲区,提高影像精度,把控监测时效,优势在于采集数据灵活,适用于重点区域。
5 结语
本研究讨论了无人机航空摄影测量的基本原理和技术特点,特别是在数据采集、处理和分析方面的优势。通过试验验证了无人机航空摄影测量技术在监控重点区域耕地“非农化、非粮化”现象中的有效性,以及无人机技术在高分辨率影像获取、灵活的数据采集以及实时监控方面展现出显著优势,适用于重点区域。无人机能高效获取大量高分辨率影像数据,覆盖面广且全天候可行,为监控重点区域耕地“非农化、非粮化”现象提供可靠的数据基础。无人机航空摄影测量技术的灵活性和实时监控能力使其成为理想的重点区域耕地监管选择,使监管工作更迅速、精准。另外,无人机相对低成本的操作使监管部门能够频繁使用该技术,更好地保护重点区域耕地资源。该研究成果对推动重点区域耕地可持续利用和保护具有重要实际意义。未来,将继续深入研究和完善无人机航空摄影测量技术在耕地监管领域的应用,为实现精准监管和可持续发展提供更多解决方案。
