公路施工中混凝土搅拌设备配料误差控制方法
2024-04-24崔新海
崔新海
摘要:在混凝土搅拌设备设定喂料提前量时,因机械动作偏差带来的物料时多时少,导致配料实际值与设定值存在误差,为此对混凝土搅拌设备配料误差控制方法进行研究十分必要。根据混凝土搅拌站配料系统结构,确定配料误差主要为非线性的喂料误差,引入自适应补偿算法修正喂料的提前量,实现混凝土搅拌设备配料误差控制。实例研究结果表明,所设计方法可以将混凝土搅拌设备配料误差控制在0.5%以内,证明了该方法的有效性。
关键词:公路施工;混凝土搅拌设备;配料误差;控制方法
0 引言
混凝土配料工序的精度与速度对工程质量有着严重影响。然而,在实际的混凝土搅拌设备配料中,由于混凝土是一种由水泥、砂石以及各种添加剂所组成的非匀质物料,受搅拌设备与搅拌技术的限制,使得混凝土配料过程产生落料误差、计量误差以及悬浮误差等。一旦混凝土的配料工序存在误差,将会直接影响混凝土的持久性与强度,所以如何降低混凝土搅拌设备配料误差,逐渐成为我国建筑领域关键研究课题之一。
为控制混凝土搅拌设备的配料误差,国内相关研究人员在配料方式上采取很多尝试,如采用二次放料或减缓原材料称量速度等方法,来降低混凝土的配料误差。这些方法虽然在一定程度上可以控制混凝土的配料误差,但不利于混凝土的配料速度。本文针对公路施工中混凝土搅拌设备的配料误差来源及影响因素,设计一种误差控制方法,以期提升混凝土配料精度。
1 混凝土搅拌设备配料误差控制方法设计
1.1 混凝土配料精度影响因素分析
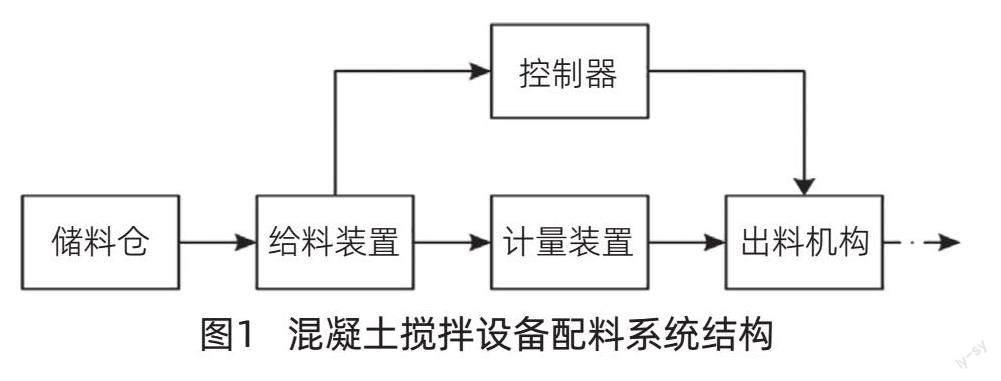
一般来说,混凝土搅拌设备配料系统主要由原材料仓库、给料装置、计量装置等设备构成[1],其结构如图1所示。
这种配料系统属于时变且无法超调的结构[2],只要在控制器内输入全部原材料的配比,系统就会控制搅拌设备完成一系列的混凝土自动化配料流程。
在实际配料过程中,如果料斗发生振动、计量装置精度不够等,则会引起一系列的搅拌设备工作误差,进而影响混凝土配料精度。所以本文主要结合混凝土搅拌设备的配料系统结构,确定配料误差的主体误差,从而有针对性地设计误差控制方法。
1.2 配料误差原因分析
通常混凝土搅拌设备配料误差包含喂料误差、崩塌误差等。由混凝土搅拌设备机械运动惯性以及不确定性所造成的误差就是喂料误差。也就是在喂料过程中,因机械运动的动作发生偏差、计量装置计量偏差等原因,导致带来的物料量具有随机性,进而引起的误差。所以喂料误差为混凝土搅拌设备配料误差的主体误差[3]。
1.3 配料误差数学模型
本文将结合混凝土搅拌设备控制系统的结构,建立配料误差的数学模型。在配料系统的计量装置工作过程中,计量装置会将混凝土原材料施加的力转换为数字信号,经过相应的运算处理,形成原材料的质量数据。
1.3.1 计量装置所受力计算
配料系統中计量装置所受的力计算公式如下:
F=m0 g+? (1)
式中:F表示混凝土搅拌设备计量装置所受的力;m0 表示待测量混凝土原材料的实际质量;g表示重力加速度值;?表示计量装置吸油管所受浮力数据。
1.3.2 混凝土原材料质量计算
一般来说,混凝土搅拌设备计量装置在称取混凝土原材料的质量时,会得到原材料在计量前与计量后的差值,那么配料系统所计量的混凝土原材料质量为:
(2)
式中:G表示混凝土搅拌设备配料系统测得的混凝土原材料质量;F1、F2分别表示计量装置在称量混凝土原材料初值与终值时所受的力。
1.3.3 配料误差计算
由式(1)与式(2)可知,混凝土搅拌设备配料系统所测得的混凝土原材料质量,主要由原材料的实际质量与计量装置的浮力差计算所得,所以如果计量装置内部结构存在偏差,就会导致配料出现偏差。该配料误差的计算公式如下:
G'=λG (3)
式中:G'表示混凝土搅拌设备喂料过程中,因计量装置结构造成的混凝土原材料计量误差;λ表示计量装置的浮力影响系数。
1.3.4 设备工作误差计算
除此之外,混凝土搅拌设备的喂料误差还包括设备工作误差,其计算公式如下所示:
C'=P-G =T-K (4)
式中:C'表示混凝土搅拌设备喂料过程中,因机械工作状态造成的混凝土配料误差;P表示混凝土配料比设定值;T表示混凝土配料时设定的提前量;K表示空中料柱量。
综上,本文给出了混凝土搅拌设备喂料误差中常见的计量装置误差与工作误差的数学模型。在进行配料误差控制时,需要准确掌握误差来源与过程,才能有针对性地控制误差,实现混凝土搅拌设备的高精度配料。
1.4 配料误差的自适应补偿控制
由上述内容可知,混凝土搅拌设备的配料误差主体是喂料误差,这是一种具有非线性、随机性等特点的误差,传统的控制方法难以保障控制精度,为此本文引入自适应补偿算法,设计一个配料误差补偿模型,来实现误差的自适应控制[4]。
1.4.1 自动化配料原理
一般来说,在混凝土搅拌设备进行自动化配料时,需要提前预测空中料柱量,根据该数据对混凝土的提前量进行设定。当启动搅拌设备的喂料程序时,会不断检测喂料的质量,并将给定量与实际喂料质量进行对比,二者之间的误差与设定提前量一致时,就会停止喂料,否则根据空中料柱量来补齐混凝土给定值。
1.4.2 自适应补偿算法的优势
如果喂料的提前量设定精度不合理,将会直接影响配料的准确性。如果提前量较小,会影响搅拌设备的计量装置的称取精度,反之如果提前量较大,会导致下次配料准确性较差。本文通过自适应补偿算法,来控制提前量的精度,从而提升配料精度[5]。
1.4.3 配料误差自适应补偿控制方法
混凝土搅拌设备配料的空中料柱量,主要受已有料量、配料比设定量、数量装置的机械工作参数等因素影响,所以根据修正提前量,来控制混凝土搅拌设备的配料误差,属于多因素的随机性问题。本文利用自适应补偿算法,构建一个提前量修正补偿的数学模型,具体公式如下:
(5)
式中:Tn+1表示混凝土搅拌设备第n+1次配料的提前量;n表示混凝土搅拌设备配料的总次数;(G'+C')i表示混凝土搅拌设备第i次的喂料误差。
在根据式(5)得到混凝土搅拌设备配料提前量的修正补偿数学模型后,需要将其设置在配料控制系统上[6],按照图2所示流程进行模型运算,从而实现配料误差控制。
在混凝土搅拌设备配料系统中,混凝土的各种原材料具有不一致特性,且它们的储料仓也不一致,所以会导致空中料柱量难以精准设定。本文针对混凝土搅拌设备配料误差,设计一种自适应补偿模型,以此不断修正混凝土配料的提前量,进而达到配料误差控制的目的。
需要注意的是,修正的混凝土配料提前量,可以呈现出当下混凝土搅拌设备的配料偏差,所以不同的混凝土原材料,需要采用不同数据样本进行修正,以此保障配料误差控制效果。
2 实例分析
2.1 工程概况
某高速公路全长28.5km,路面宽度为24m,设计为双向四车道。该公路路面设计为混凝土面层结构,为满足高强度、持久性、防渗性、稳定性等需求,采用粒径较小的级配混合料,其配比如表1所示:
为充分发挥混凝土路面结构的作用,需严格按照表1中的配合比进行配料。该公路工程采用的是自动配料系统,也就是将各种原材料装入自动配料系统后,系统会按照设定配比自动称重计量,然后运输至搅拌设备中,搅拌成混凝土。在此过程中,受众多因素的限制存在严重误差,如果混凝土的配合比控制不够,配料精度未达到0.5级,那么公路路面结构在早期会出现松散、裂缝、油包等病害。
2.2 结果分析
为验证本文设计方法的可行性与可靠性,首先不采用设计控制方法,进行混凝土搅拌设备的自动配料,得到配料结果的实际偏差如表2所示。
由表2可知,原有混凝土搅拌设备配料的相对误差在1.19%~6.2%范围内,不符合我国预拌混凝土国家标准,难以确保混凝土公路路面结构的高质量性以及混凝土材料的高利用率。
在保障其他实验条件一致,在混凝土搅拌设备自动化控制系统上融入本文设计的误差控制方法,再次运行搅拌设备,此时得到混凝土配料结果与实际的偏差数据如表3所示。
由表3可知,采用本文设计方法控制后的混凝土搅拌设备配料的相对误差均在0.5%以内,表明此时配料精度达到了0.5级别,可以满足公路施工中对混凝土搅拌设备的配料精度要求。
由此可以说明,本文设计的误差控制方法效果良好。通过自适应补偿算法来修正混凝土喂料中的提前量,可以有效解决具有随机性、非线性等特点的混凝土搅拌设备喂料误差,从而提升混凝土配料精度。
3 结束语
混凝土配料的精度是影響公路施工质量的关键因素,我国常见混凝土搅拌设备的自动化配料过程中无法避免存在一定误差,所以本文设计一种配料误差控制方法。文中首先确定了混凝土搅拌设备配料误差中的主体误差,并结合该主体误差设计一个自适应补偿模型,来修正喂料中的误差,达到了配料误差控制的目的。同时,经过了实际工程的测试,验证了设计方法可以有效控制混凝土搅拌设备的配料误差,实现高精度配料,具有一定适用性。虽然本文已经取得一定研究成果,但由于时间有限,文中仅从混凝土搅拌设备配料精度进行了研究,今后将针对配料速度做进一步研究,为推动我国公路工程项目的健康发展做贡献。
参考文献
[1] 王哲,于源华,孟祥凯,等.体外凝血动态检测传感器装调
检测误差控制方法[J].机械工程学报,2021,57(20):57-67.
[2] 吕盾,刘硕,赵艳超,等.具有串联轴伺服进给系统的跟随
误差控制策略[J].西安交通大学学报,2021,55(05):34-44.
[3] 陈婵媛,杨丽新,张德福,等.基于神经网络的含间隙串联
机器人误差控制仿真研究[J].机床与液压,2021,49(09):34-
40+50.
[4] 吴桐,袁行飞,蒋淑慧.基于可靠度理论及非线性规划的索
杆体系索长误差控制限值研究[J].建筑结构学报,2021,42
(10):207-214.
[5] 李超,焦义文,傅诗媛,等.基于GPU的数字下变频累积误
差控制方法[J].系统工程与电子技术,2023,45(04):965-972.
[6] 林子豪,方成刚.具有同步带伺服传动系统的振动误差控制
策略[J].组合机床与自动化加工技术,2023(01):61-66.
