基于激光SLAM自主导航技术的多功能共享轮椅
2024-04-22刘凯李鹏林群煦林梓健张立炜
刘凯,李鹏,林群煦,林梓健,张立炜
(五邑大学 轨道交通学院,广东 江门 529000)
0 引言
21世纪以来,许多国家的人口老龄化现象加剧[1],根据世界卫生组织报告,65岁及以上的老年人总量在2020年首次突破7亿,而我国老年人口总量更是位居全球各国之首,据国家局2021年统计,我国65岁及以上的老年人数量达到了2亿,是当时世界唯一一个老年人口数量超过2亿的国家。同时残疾人数量也正在不断攀升,自2020年报告以来,全世界超过10亿人带有某些方面的残疾,而我国残疾人总数超8500万,约占世界人口的10%。“十四五”时期,我国积极应对人口老龄化,并上升为国家战略。当前我国的老龄化承载能力较弱,老年服务和产品市场具有极大发展潜力,而对于失能、行动不便的人群来说,轮椅是他们在日常生活当中必不可少的辅助工具。目前国内市场的在售轮椅,在使用方面都具有不少的局限性,特别是在人性化功能设计方面有很多待提高的空间。因此,本文对多功能智能共享轮椅设计实验进行了创新探索,并提出在公共场所为群众科学共享使用,给使用者提供更加智能便捷的服务,让使用者获得更好的操作体验。
1 智能轮椅的概述
1.1 轮椅市场发展现状
在轮椅的使用早期,轮椅的定义是装置配备有轮子的椅子,而轮椅的驱动则需要陪护人员的手动推行,随着使用者体验需求的改善,在轮椅轮子上增加了手圈结构,可让使用者实现对轮椅的自驱动,但对老年人或是残疾人的身体机能的要求较高。随着科技的不断发展,市场上逐渐出现了以电动机驱动的电动轮椅,可以减少人们使用过程当中的局限性。老年人市场的逐步扩大,轮椅智能化的研究成为了必然的趋势,目前市场上智能轮椅仍有很大的研发空间。
1.2 系统原理概述
为了提升轮椅对于老年人、行动不便等人群使用的普适性,本文提出一款可用于公共场所的共享智能轮椅,以STM32F107VC单片机模块作为核心的运动控制系统,轮椅配备有英伟达Jetson nano智能运算平台,该平台可融合激光雷达传感器、IMU惯性传感器、心率健康检测装置及平板电脑手机APP等的数据信号,通过CP2102模块转换为电平信号下发至STM32控制轮椅驱动,系统原理如图1所示。本文还对轮椅提出更加人性化的机构设计,为使用者带来更加便捷的使用体验。

图1 智能轮椅系统原理图
1.3 科学性和先进性分析
据调研发现,早在2018年,江苏、北京等地就已经在部分社区和医院投放使用了共享轮椅,大多共享轮椅是折叠式的帆布轮椅,具有便携轻量、方便使用的特点,但轮椅的自驱动性严重不足,甚至是没有,需要陪护人员推动行驶,对于使用者的自驱动使用仍有很大的改善空间。
共享轮椅的智能化行驶可以通过使用者自我控制,也可以通过平板输入、语音输入两种方式给轮椅下达行驶目的指令,在过程中无需人为操控,实现自主导航至目的地,其技术路线如图2所示。自主导航功能可以减少老年人在使用过程中的自身决策,可以有效保障一些特殊使用者在行驶途中的安全性及更为智能的使用。其中,语音交互功能可以在使用轮椅过程中与人实时交流,加强人机之间的互动性,一些人性化机构设计、健康检测系统可以提高用户的使用体验。
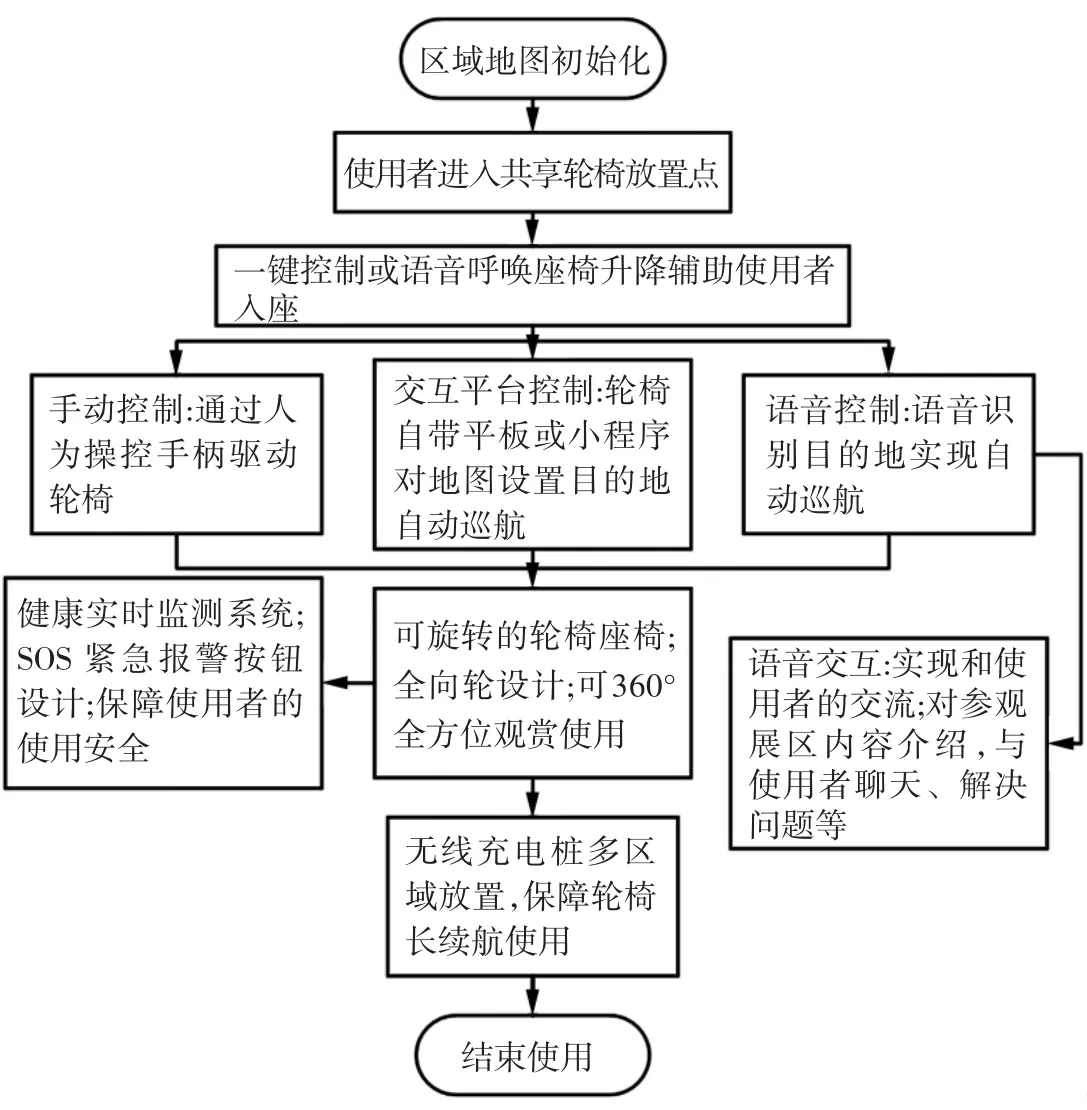
图2 智能轮椅的使用流程图
2 轮椅智能装置结构总体设计
2.1 整体外观设计
在整体外观设计上,本设计实验的智能共享轮椅与普通电动轮椅的结构区别较大,其总体结构设计如图3所示。共享轮椅采用由4个电动机驱动的小直径万向轮,座椅可以相对圆台底座自由上下升降,而圆台底座也具备可控制的旋转功能,并且在圆台处配备一个可随使用者旋转的置物槽,以便使用者在乘坐过程中有更开阔的参观视野。考虑到老人自身行动的不便性,座椅的设计上安装了一种半升降辅助入座机构(如图4),当有人靠近轮椅时,座椅前半部分由4根电推杆支撑差速上升,自动启动辅助入座,以减少老人膝盖的发力。

图3 智能轮椅整体结构图
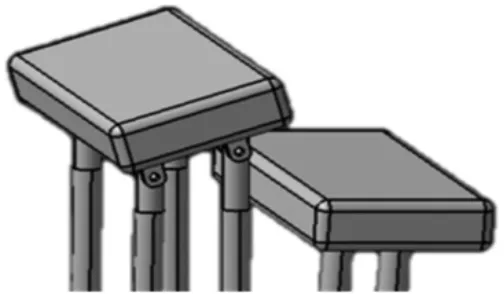
图4 半升降座椅结构图
智能轮椅的顶端配备有一个激光雷达,通过扫描周边环境的2D点云数据,确定自身所在位置,并构建环境地图,在使用轮椅过程中,激光雷达也可对周边环境进行实时回环检测,实时更新地图以适应环境的不断变化,无需人工重新建立地图。
在轮椅的投入使用前期,可通过远程操控,对将要应用的活动区域空间进行扫描,构建完整的二维平面栅格地图后,对该区域所有应用的轮椅群进行地图共享上传。轮椅行驶过程中,该功能为共享轮椅提供准确的位置信息,也提高了共享轮椅自主运动系统的环境适应性。
2.2 主控制单元模块
轮椅主控模块设计的要求为:1)具有自主运动能力。可以根据乘坐人员的意愿对轮椅输入目标指令,自主运动到不同的目的位置,在行驶过程中能优化路线并自动避障。2)能人工操控。由乘坐人员自主选定到达的目标位置,到达位置后能驻留观赏。3)能采用多种控制方式,除了上述的输入指令控制外,还应有遥控手柄控制。为此,本设计实验的运动控制系统单元,采用Jetson Nano为主控计算机,以STM32F107VC工控板作为运动单元的控制系统,如图5所示。
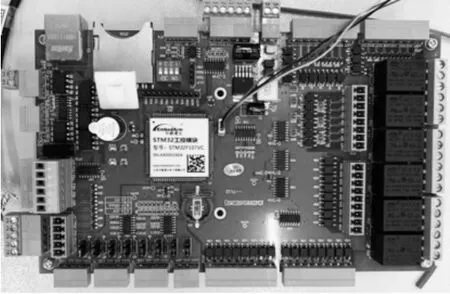
图5 STM32F107VC工控板示意图
STM32工控板从上位机接收指令后,通过对IN1、IN2 的 电 平控制指令,实现左右轮转向的变化,如表1所示。而PWM通过改变脉冲列的周期对速度进行控制,其原理是通过改变脉冲的宽度或占空比来进行调压,采用适当控制方法,即可使电压与频率协调变化。可以通过调整PWM的 周 期、PWM 的占空比达到控制充电电流的目的,用以调控轮椅全速前进或后退,也可以通过降低电平来调整速度[2]。

表1 IN1、IN2电平变化及PWM的占空比与运动状态关系表
2.3 智能无线充电桩设计
多功能智能轮椅采用无线充电方式充电。无线充电器是根据电磁感应原理,利用电磁感应技术,通过内置线圈,把电流转化为电磁后又把电磁转化成充电电流给“自己”充电,如图6所示。无线充电器具备多种保护功能,如过充过放、金属异物检测等,时刻保护使用者的安全。无线充电器的组件无外漏,不会被空气中的水分、氧气等侵蚀;无线充电器不存在接电点,不会有连接与分离时造成的机械磨损[3]。在大面积公共场所中,可以将充电桩多点式分布在轮椅可能会停留的地方,如餐厅、景区观赏点、休息区等,在乘坐人员逗留期间,无需人为操控就可以实现轮椅自动无线充电。
2.4 健康监测应急系统设计
如图7所示,轮椅带有实时健康监测功能,可以对特定人群或人群样本的健康状况,定期或不定期地观察监测,掌握其健康及疾病状况。本轮椅左侧配备有紧急按钮(如图8),该按钮也可以称为“紧急停止按钮”,业内简称急停按钮[4]。顾名思义,急停按钮就是当发生紧急情况时,快速按下此按钮来达到保护的作用,同时发出求救信号(一键求助),本轮椅还有旋转座椅、折叠把手、景点解说等辅助功能,极大提升了使用者的便利体验和安全性。
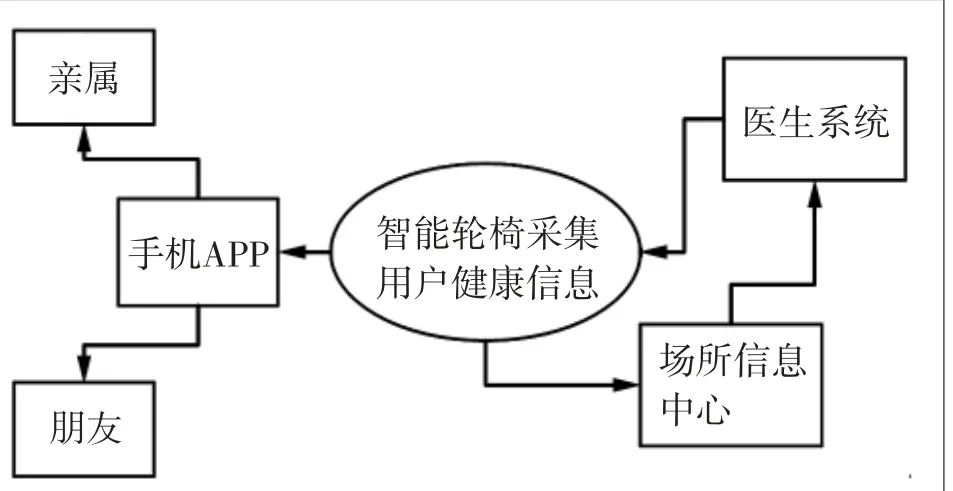
图7 应急SOS紧急系统与健康实时检测系统

图8 紧急按钮示意图
3 智能轮椅的自动导航与避障
3.1 基于Cartographer的地图构建算法
在人工智能技术的推动下,近年来自动驾驶技术快速发展,其中SLAM(Simultaneous Localization and Mapping,同步定位与制图)技术得到了广泛应用[5],本轮椅的地图构建采用Cartographer室内建图算法。与其他建图算法相比,Cartographer室内建图算法的优点是引入了子图(Submap)的概念,具有实时性高、累积误差小的特点,能够建立大场景的地图。可见,这种算法是适用于轮椅使用场合的。激光雷达每扫描获取一组数据,就与已建立的子图进行匹配,不断更新迭代建立全图,不断循环,达到回环检测的作用。并利用分支定界(Branch and Bound)进行优化搜索,提高效率,达到实时回环的作用。图9为基于Cartographer建图的效果。在智能轮椅的日常使用中,实时回环能给使用者带来更大的便利,特别是在公共场所,实时回环具有更大的便捷性。

图9 基于激光Cartographer雷达建立地图
3.2 智能轮椅的导航避障算法分析
对轮椅自主导航的避障方面,本设计实验采用的是DWA算法(Dynamic Window Approach,动态窗口算法)。DWA算法适用于两轮差速和全向移动机器人,智能轮椅采用的运动模型属于全向移动机器人,DWA算法不需要完整的地图环境信息,而是通过自身传感器不断地获取周围信息,提供最新的环境变化信息。其原理为在速度空间采样多组速度(ν,ω),以不同的线速度v、角速度ω在一定时间内模拟轮椅将要运动的轨迹,得到多组轨迹的速度后,结合当前状态,通过评价函数对每一组速度上的轨迹进行评分G(ν,ω),如式(1)所示,以对未来轨迹进行预测。而评分是以轮椅设定的速度情况下,朝着不断趋向目标的最小方位角Heading(ν,ω),轮椅与目标最近的距离Goal(ν,ω),计算轮椅轨迹末端点到全局路径的距离Path(ν,ω),评价轮椅与障碍物之间的距离Occ(ν,ω)以避开障碍物为标准,其中k、α、β、γ、σ为权重系数。最终选取最高分轨迹,并发布最佳速度集合至下位机来驱动轮椅的下一步运动并实现导航[6]。该算法突出特点在于其动态窗口,是在一个可行的动态范围内,依据轮椅加减速的性能来限定速度的采样空间,并且在不同的环境下,可以添加更多的评价指标和调整指标权重进行优化,提高轮椅导航的适应性,为轮椅的稳定驱动保障了安全性。G(ν,ω)的计算公式为
4 智能轮椅在Rviz的仿真效果
Rviz是ROS的三维可视化工具[7]。其主要功能是以三维方式显示ROS消息,获得数据可视化的效果。通过节点的设置来发布数据至Rviz,在启动轮椅地盘节点、Cartographer建图节点、DWA导航节点后,进入Rviz平台添加显示模型(RobotModel)、激光雷达传感器的获取信息(LaserScan)、所绘制的箭头形状(MarkerArray),再对相应类型设置话题,则获取可视化信息,如图10所示,通过激光雷达对场所环境的扫描建立完整地图后,可以确定自身在地图中所处位置,通过2D Nav Goa(设定导航目标)对地图任意处选择目的地,可达到自动生成最佳行驶路径,实现自动导航。最后基于Rviz平台进行参数调试,获取运动仿真,验证了轮椅各项功能使用的可行性和有效性。
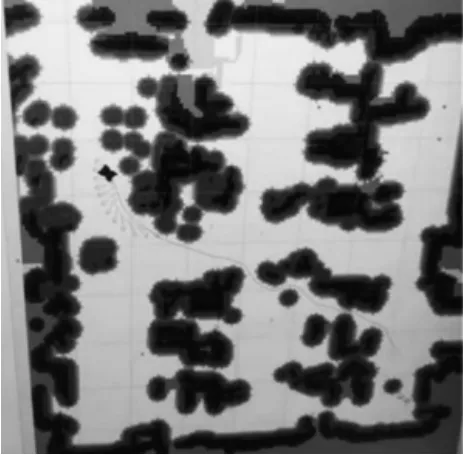
图10 智能轮椅在地图中的局部路径规划示意图
5 结语
现如今,共享市场广阔,共享单车、共享汽车、共享充电宝等产品层出不穷。本设计实验的智能共享轮椅市场前景广阔,我国有大量的场馆、景点和封闭园区,2022年我国的博物馆总量将超过8000座以上,加上体育馆、演艺中心等,我国这类大型场所数以万计。轮椅市场用户众多,主要是为行动不便的老人、伤病者或残疾人等特殊人群提供的一种便携的公共交通方式,以共享轮椅的形式实现多种交互模式、人性化机构设计、智能驱动使用,为特殊人群带来了便捷出行的可能。
共享智能轮椅为行动不便的老年人、伤病者、残疾人等特殊人群在参观游玩时提供更好的人文关怀,提高了特殊人群在特定场所游玩参观的可行性,以获得更好的体验,而且为特殊人群的日常提供智能服务,协助他们便捷生活。最后基于Rviz平台进行参数调试,获取运动仿真,有效验证了其功能实现的可行性。
