基于DRFM的雷达有源干扰信号识别算法综述
2024-04-19赵忠臣刘利民韩壮志
赵忠臣, 刘利民, 解 辉, 韩壮志, 荆 贺
(陆军工程大学石家庄校区,石家庄 050000)
0 引言
雷达通过分析接收到的电磁波信息实现对目标的侦察、追踪等功能[1-3],在此过程中不仅能检测到目标回波信号,还会受到其他信号的干扰,这将严重降低其性能。在现代战争中,电子对抗[4-6](Electronic Countermeasures,ECM)日益激烈,特别是数字射频存储[7-10](Digital Radio Frequency Memory,DRFM)技术不断发展成熟,针对雷达的有源干扰手段更加灵活多变,效果也更加显著。因此,研究高效自主的干扰识别算法具有重要的军事意义和实用价值。
为提高雷达抗干扰[11]水平,科研人员在雷达干扰信号识别方面取得了一定进展。文献[12-13]通过小波分解将干扰划分为不同频段,提取频域特征参数完成分类识别,但是在低信噪比环境下识别准确率不高。文献[14-16]经过分数阶傅里叶变换(FRFT)和Choi-Williams分布(Choi-Williams Distribution,CWD)得到干扰时频信息,实现对干扰信号的分类识别,但是运算量较大,适用于强噪声环境;文献[17-19]通过分析干扰信号特征之间的差异,利用决策树(Decision Tree,DT)分类器进行识别,方法简单实时性好,但阈值设定的合理性对识别结果影响较大;文献[20-24]利用支持向量机(SVM)在干噪比(JNR)大于0 dB时获得了很好的干扰识别效果,但在强噪声环境下效果一般;文献[25-28]通过卷积神经网络(CNN)及其优化算法对各类干扰的识别准确率较高,具有很好的鲁棒性。但以上方法存在干扰普适性弱、分类器匹配特征少、需要大量先验知识、运算实时性差等缺点。
本文通过DRFM的工作原理阐述干扰形成的过程,根据作用性质将17种常见干扰进行分类,围绕信号特征提取和分类器这2个干扰识别的核心环节,归纳总结了近几年的研究成果,以2种压制干扰为例对比分析了不同信号特征提取和分类器对干扰识别结果的影响,最后针对雷达有源干扰信号识别算法未来的发展方向做出了展望。
1 DRFM工作原理
基于DRFM的雷达干扰系统是一种集欺骗、压制干扰于一身的电子对抗技术,它将侦测到的雷达信号利用回波产生原理进行多种调制,既可以产生遮盖真实目标回波的压制性干扰,又可以产生以假乱真的欺骗性干扰,其工作原理如图1所示。
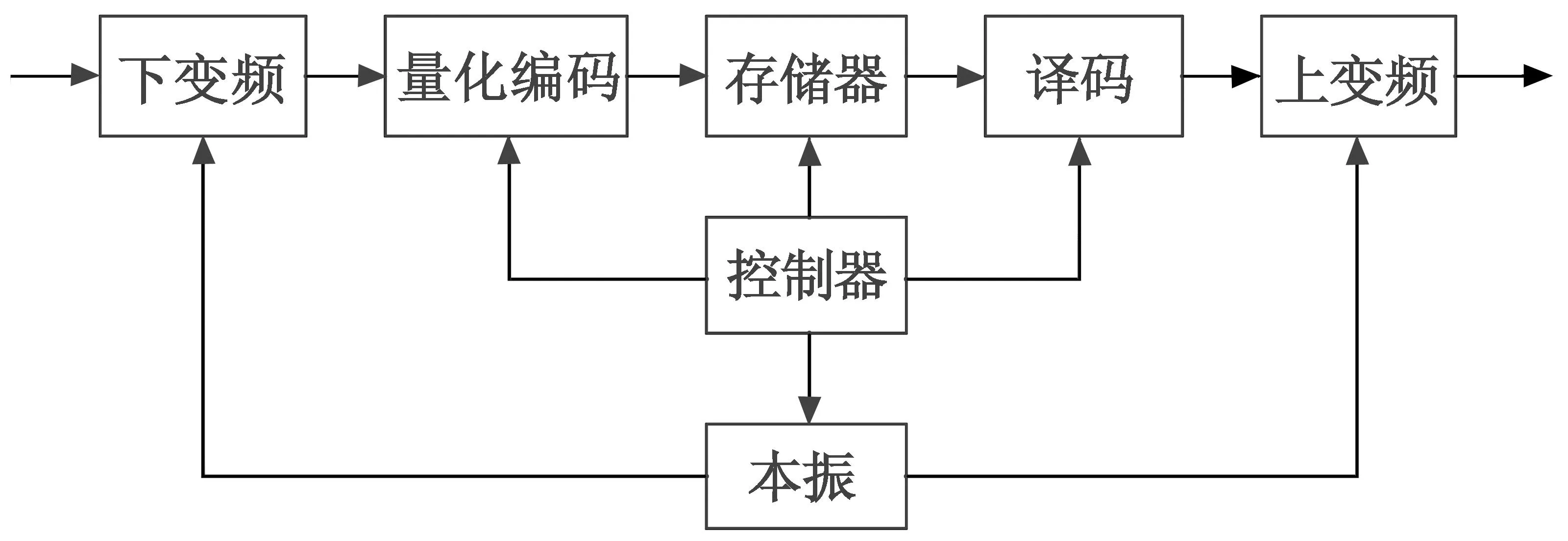
图1 DRFM工作原理
DRFM将接收的雷达信号进行混频、滤波、放大、模数转换后存储起来,然后由控制器对存储的信号进行延时、移频调制,最后经过数模转换、混频、滤波、放大将调制后的干扰信号发射出去。
DRFM技术具有快速存储、保留信号特征信息的功能特性,可实现多种干扰联合控制,保持干扰信号与雷达目标回波信号的相干性,大幅度提高干扰效果。
2 干扰信号种类
雷达干扰的种类有很多,依据是否外部干预可划分为有意干扰和无意干扰,其中,有意干扰对战场环境下雷达性能的影响更加明显,其分类如图2所示。
有意干扰依据干扰来源可分为主动施放的有源干扰[29-30]和反射能量的无源干扰[31-32]。有源干扰依据干扰作用性质可分为压制性干扰[33-34]和欺骗性干扰[35-41]。本文简要介绍几种常见有源干扰类型。
2.1 压制性干扰
干扰机通过发射大功率噪声或拟噪声信号,使雷达接收系统饱和,降低其探测能力。由图2可知,压制性干扰主要分为噪声调制类和灵巧噪声类。
2.1.1 噪声调制类
噪声调制类主要包括射频噪声干扰[14-15],噪声调幅[14-16]、噪声调频[14-16]、噪声调相[36]干扰,其干扰表达式为

(1)
2.1.2 灵巧噪声类
灵巧噪声类干扰通常将雷达信号时延后与窄带高斯噪声进行乘积或卷积,以达到在时域和频域的压制效果,主要包括噪声乘积(Noise Product,NP)干扰[35,37]和噪声卷积(Noise Convolution,NC)干扰[35,37],噪声乘积干扰JNC和噪声卷积干扰JNP表达式分别为
JNC=S(t-τ)×n(t)
(2)
JNP=S(t-τ)⊗n(t)
(3)
其中:S(t)为雷达信号;τ为时间延迟;n(t)为窄带高斯噪声。
2.2 欺骗性干扰
欺骗性干扰通过发射与目标回波相似的欺骗信号,使得雷达获取失真的距离、方位和速度等参数,不能对真实目标进行检测和跟踪。欺骗性干扰对干扰机发射功率的要求远小于压制性干扰,受制于一般干扰机实装条件,战场环境下,利用DRFM技术产生的多是欺骗性干扰,常见的欺骗性干扰分为假目标类干扰、波门拖引类干扰和新型干扰。
2.2.1 假目标类干扰
干扰机为截获的雷达信号附加一定的时延、频移、相移参数后,增益转发,使得雷达的测量跟踪系统产生错误判定,并可能测量跟踪功率较大的干扰信号而忽视真实信号,以达到欺骗目的。常见的假目标类干扰有距离假目标[38-40](Range Deception,RD)干扰、速度假目标[38-40](Velocity Deception,VD)干扰与角度假目标[38-39](Angle Deception,AD)干扰,其干扰表达式为
J(t)=Aexp((2πf0+a1Δω)(t-a2Δt)+a3Δφ+jπk(t-a2Δt)2+φ0)
(4)
式中:A为干扰信号幅度;k为调频斜率;Δω=αt,Δt=βt2,Δφ=γt分别为速度假目标、距离假目标和角度假目标的调制函数;α、β、γ均为常数;a1=0、a2=1、a3=0时为距离假目标干扰,a1=1、a2=0、a3=0时为速度假目标干扰,a1=0、a2=0、a3=1时为角度假目标干扰。
2.2.2 波门拖引类干扰
波门拖引类干扰与假目标类干扰不同之处在于附加的时延、频移等参数按照一定规律调制。波门拖引类干扰的产生可分为波门捕获、波门拖引和干扰关闭3个阶段。常见的波门拖引类干扰有距离波门拖引(Range Gate Pull Off,RGPO)干扰[12-13]、速度波门拖引(Velocity Gate Pull Off,VGPO)干扰[12-13]和距离-速度波门同步拖引(Range-Velocity Gate Pull Off,R-VGPO)干扰[12-13]。单一的RGPO干扰或VGPO干扰,只改变时延或频移,很容易被识别滤除,在实战中多使用R-VGPO干扰。
波门拖引类干扰表达式为
J(t)=Aexp(φ(t-t0-tj-a1Δt)+φ0)exp(a2(j2πΔft))
(5)
式中:tj为干扰机固有延迟;Δt为调制时延;Δf为调制频移;φ(t)=jπ(2f0t+kt2),a1=1、a2=0时为RGPO干扰;a1=0、a2=1时为VGPO干扰;a1=1、a2=1时为R-VGPO干扰。
2.3 新型干扰
传统的噪声调制类、假目标类、波门拖引类干扰通过改变信号时域或频域参数使雷达无法发挥其真正作用,但雷达可以通过捷变频、旁瓣对消、匹配滤波等实现有效应对。随着DRFM技术的快速发展,涌现出许多兼具时域、频域特性的新型干扰,常见的有间歇采样转发(Interrupted Sampling and Repeater,ISR)干扰[42-43]、频谱弥散(Smeared Spectrum,SMSP)干扰[44-45]、切片重构(Chopping and Interleaving,C&I)干扰[45-46]、梳状谱(Comb Spectrum,COMB)干扰[42,46]和密集假目标(Dense False Target,DFT)干扰[46-47]。这些新型干扰通过制造大量的虚假目标来淹没真实目标,在欺骗的同时也会产生压制的效果,因此在实践中得到广泛应用。
2.3.1 ISR干扰
ISR干扰通过干扰机将截获的雷达信号转发出去,可起到压制和欺骗的效果,其表达式为
J(t)=u(t)*j(t)
(6)

间歇采样转发干扰分为直接转发、延时转发和重复转发3种模式,其表达式为
(7)
式中:Δt为延迟转发时间;M为重复次数;a1=1,a2=0,a3=0时为直接转发干扰;a1=1,a2=1,a3=0时为延迟转发干扰;a1=0,a2=0,a3=1时为重复转发干扰。
2.3.2 SMSP干扰
SMSP干扰是一种专门针对LFM信号的密集型假目标干扰,该类干扰产生原理为干扰机截获雷达信号[48],离散化处理后存储在DRFM中,然后利用n倍于雷达信号时钟频率进行采样,获得调频斜率n倍于LFM信号的干扰子脉冲,再将得到的干扰子脉冲连续复制n次,即形成了SMSP干扰[49]。该种干扰的表达式为
(8)
式中:n为脉冲重复次数;SMSP干扰可以形成密集的假目标,对雷达系统具有欺骗和压制的双重效果。
2.3.3 C&I干扰
C&I干扰是一种截取干扰,其产生过程包括切片(Chopping)和组合(Interleaving)两个步骤。切片阶段表示为

(9)
组合阶段表示为

(10)
其中:s(t)为LFM信号;a(t)为采样信号;Ta为切片周期;m为信号截取的段数;n为每个子脉冲复制次数;最终雷达信号被分成了m×n段,每一段的时宽为τ=T/(mn)。
2.3.4 COMB干扰
COMB干扰由多个在时域上叠加在频域上分离的子干扰构成,整个干扰的频谱呈现梳齿状分布。COMB干扰可看作是梳状谱信号与雷达信号在时域相乘得到,其表达式为
(11)
式中:fi为各梳齿频率;Ai为第i个频率点处的幅度。COMB干扰可以精确确定频率点,对频率捷变雷达有很好的干扰效果。
2.3.5 DFR干扰
DFR干扰类似于距离假目标干扰,可以形成多个不同距离的假目标,其表达式为
(12)
式中:t0为真实目标回波时延;Δtm为第m次转发时延。
3 信号特征提取方法
信号特征提取是挖掘信号本质信息的过程,是完成信号识别的关键环节之一,雷达通过分析所收集信号的特征构建特征集,利用分类器识别干扰并做出应对措施。
信号的特征一般可分为时域、频域、时频域和变换域特征。每种干扰信号因产生的原理不同,其特征也有所差异,但随着噪声的增大,特征提取会越发困难,所以提取各种干扰特有的且对噪声鲁棒性强的特征是准确识别干扰的基础。
3.1 时域特征
时域特征值是衡量信号特征的重要指标,可判断信号在不同时刻的相似性和关联性。部分学者通过分析信号时域序列特征,构建区分度高的特征集,利用相应分类器完成干扰的识别分类,表1所示为部分利用时域特征实现干扰识别的研究成果。

表1 时域干扰识别方法
3.2 频域特征
信号不仅随时间变化,还与频率、相位等信息相关,通过分析信号的频率结构可以将时域参数相同的信号区分开来。表2汇总了部分利用频域特征实现干扰识别的研究成果。

表2 频域干扰识别方法
由表2可知,文献[12]利用Morlet小波将干扰信号进行分解,选取高阶分量构建一维小波变换系数谱,通过比较系数谱的能量比实现干扰分类识别,其识别效果弱于利用小波分解研究同类干扰信号的文献[13],主要原因是文献[12]在构建系数谱时舍弃了低频分量,文献[13]构造了完备的冗余函数字典,利用稀疏表示尽可能获取干扰的频域特征。文献[35,53]对噪声调幅、噪声调频2种压制干扰进行识别,效果差异较大,区别在于所用频域特征的丰富程度不同。文献[53]分析功率谱分布特性,根据干扰与白噪声的功率谱相关系数确定判别门限,其所用频域信息单一;文献[35]将干扰小波分解后提取各频带小波包系数特征。由此可见,提取全面丰富的频域特征可以有效提高分类识别的效果。
3.3 时频域特征
单一维度的时域分析或频域分析都不能全面反映信号特征,相较于单一时域或频域特征,时频域特征更加直观精确,表3所示为部分利用时频域特征实现干扰识别的研究成果。
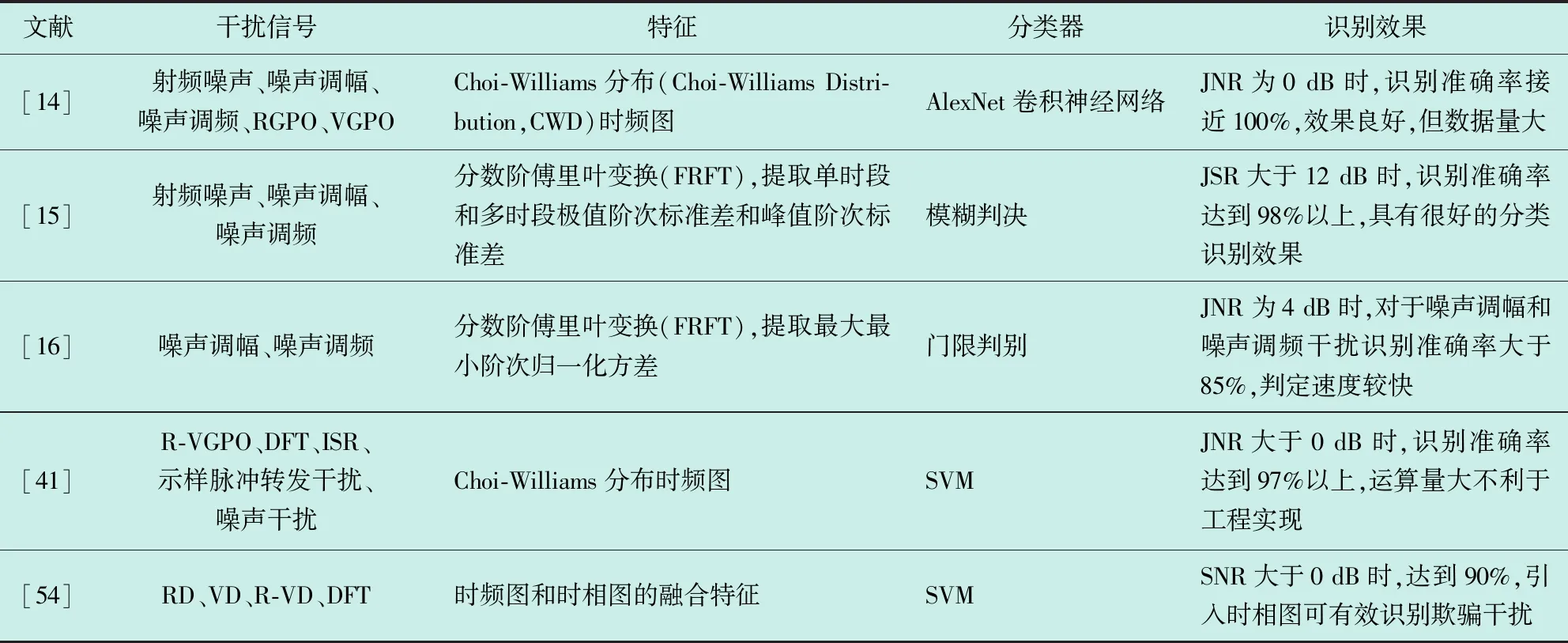
表3 时频域干扰识别方法
由表3可知,采用时频域特征具有很好的识别效果。文献[15-16]皆用分数阶傅里叶变换对噪声调幅和噪声调频干扰信号进行分析,虽然提取特征和使用分类器有所差别,但都有很高的识别可信度。文献[14,41]对不同信号进行CWD变换,利用不同的分类器自动提取时频特征,在JNR为0 dB时识别准确率都达到97%以上,比分析同类干扰选用时域或频域单一特征的文献[40,12-13]效果好。由此可见,时频域特征蕴含不同时刻的频率变化信息,能够更加准确地区分干扰信号。
3.4 变换域特征
可以找到成百上千种特征反映信号的本质,如果将所有特征都进行训练分析则会出现维度灾难,因此需要通过特征转换实现降维,筛选出少量发挥主要作用的特征。常用的特征转换方法有主成分分析(Principal Component Analysis,PCA)、独立成分分析(Independent Component Analysis,ICA)、随机成分分析(Random Component Analysis,RCA)和线性判别分析(Linear Discriminent Analysis,LDA)等方法。表4所示为部分利用变换域特征实现干扰识别的研究成果。
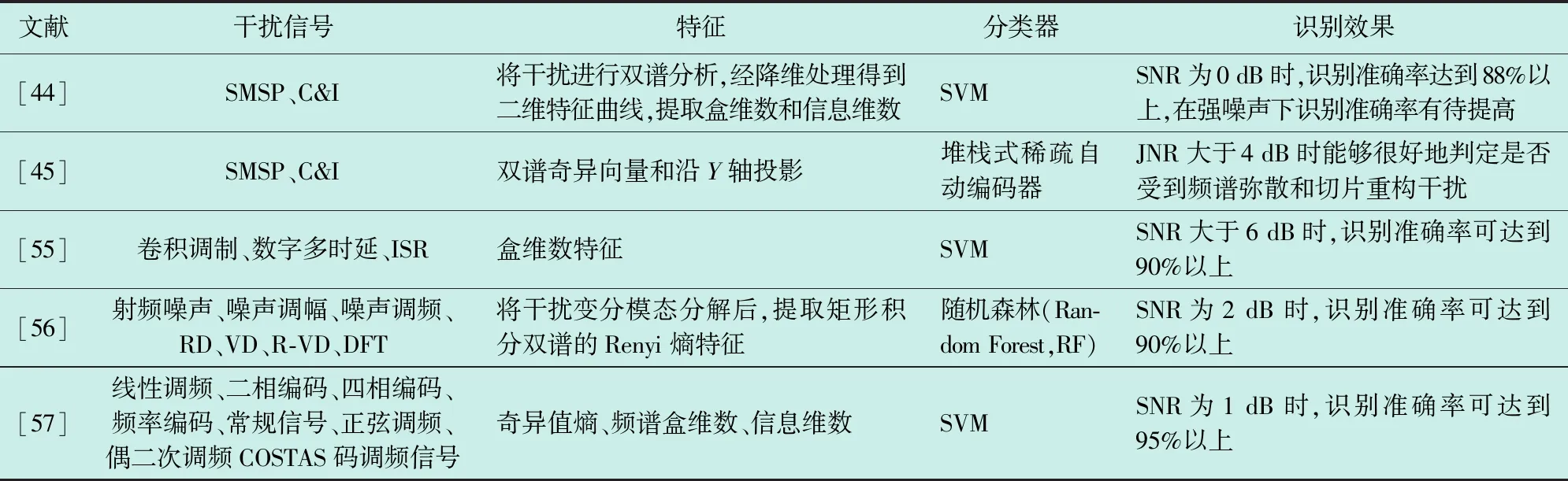
表4 变换域干扰识别方法
由表4可知,变换域特征能够对干扰信号进行更加细致的刻画,具有很好的识别效果。
4 分类器
信号特征是体现信号差异的标志,只有选用与之匹配的分类器才能充分挖掘特征的价值,实现干扰的准确识别与分类。本文主要介绍决策树[58]、支持向量机[59]、卷积神经网络[60-64]3种常用的分类器。
4.1 决策树
决策树分类器是一种归类学习算法,由决策点、状态节点和结果节点组成,部分研究成果如表5所示。

表5 决策树干扰识别方法
决策树对于处理差异性好、种类少的干扰信号具有速度快、准确率高的优点,但其主要利用单一特征参数进行区分,且门限的选择对判断结果影响很大,因此不适用于低干噪比情况下多维特征信息的分析判断。
4.2 支持向量机(SVM)
支持向量机可以将问题化为一个求解凸二次规划的问题,具体来说就是在线性可分时,在原空间寻找两类样本的最优分类超平面。在线性不可分时,加入松弛变量并通过使用非线性映射将低维度输入空间的样本映射到高维度空间使其变为线性可分,这样就可以在该特征空间中寻找最优分类超平面。与决策树相比,支持向量机具有避免人为设置判决门限的优点,表6所示为部分利用支持向量机实现干扰识别的研究成果。
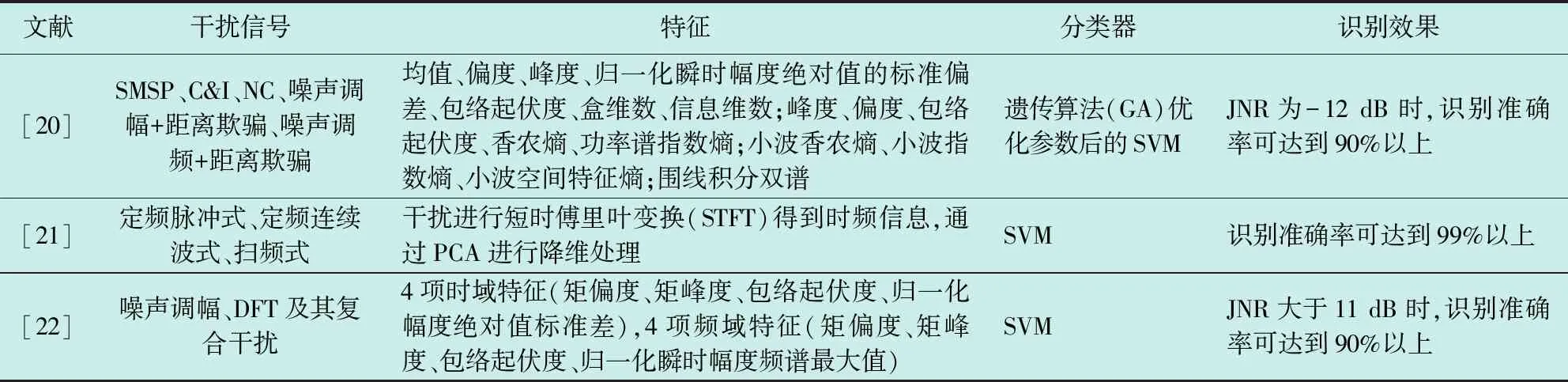
表6 支持向量机干扰识别方法
从表6可知支持向量机在干扰识别领域成果颇丰。
4.3 卷积神经网络(CNN)
卷积神经网络可以自动提取最优特征并进行深度学习,可以有效处理复杂的非线性问题,近年来在雷达干扰信号的分类识别中得到广泛应用,表7所示为部分采用CNN实现干扰识别的研究成果。
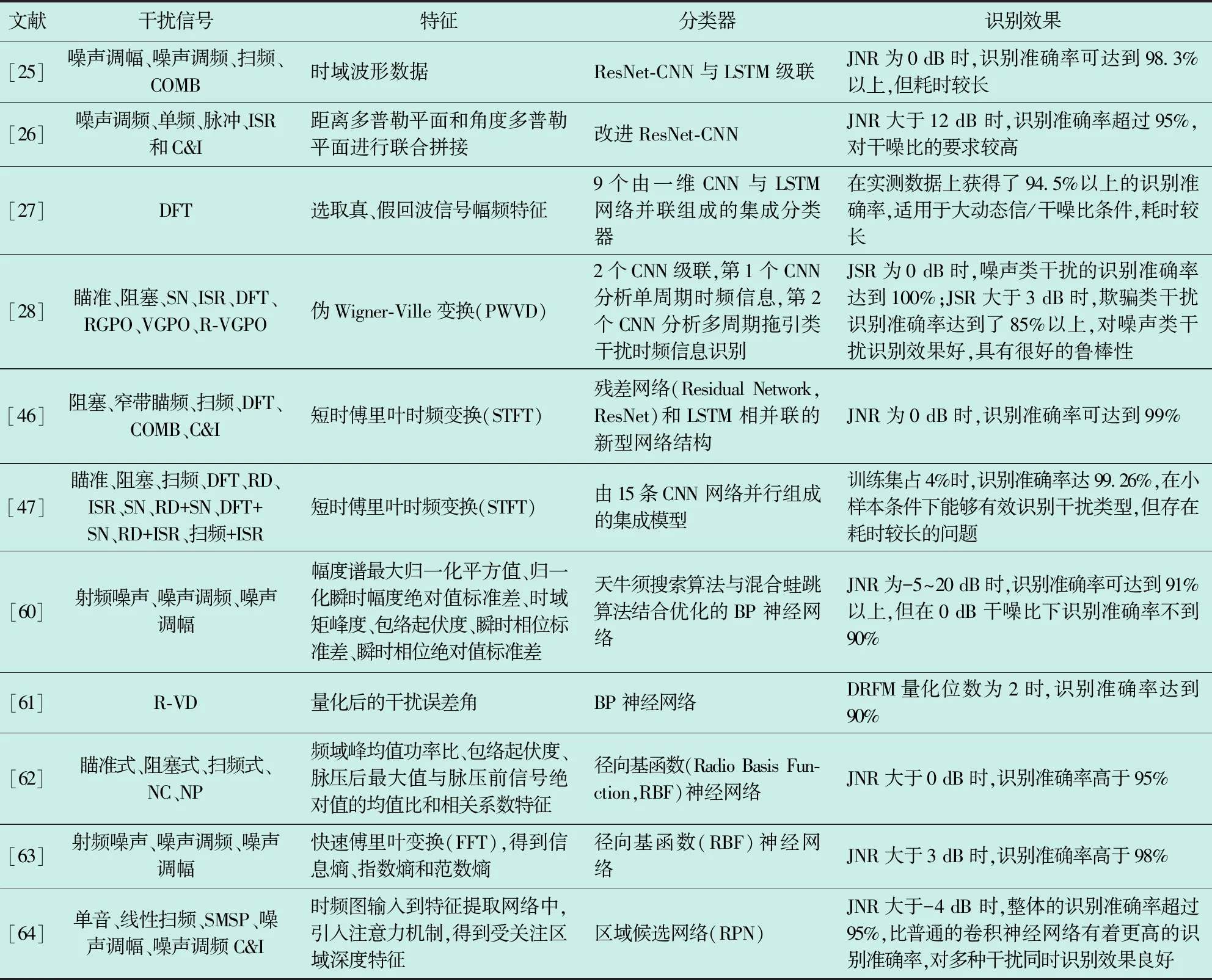
表7 卷积神经网络干扰识别方法
通过表7可知,卷积神经网络具有较高的识别准确率和对噪声的鲁棒性。
5 干扰识别算法性能比较
本文以2种压制性干扰(噪声调幅、噪声调频)为例,比较不同信号特征提取和分类器的干扰识别效果,各算法识别效果和算法说明分别如图3与表8所示。
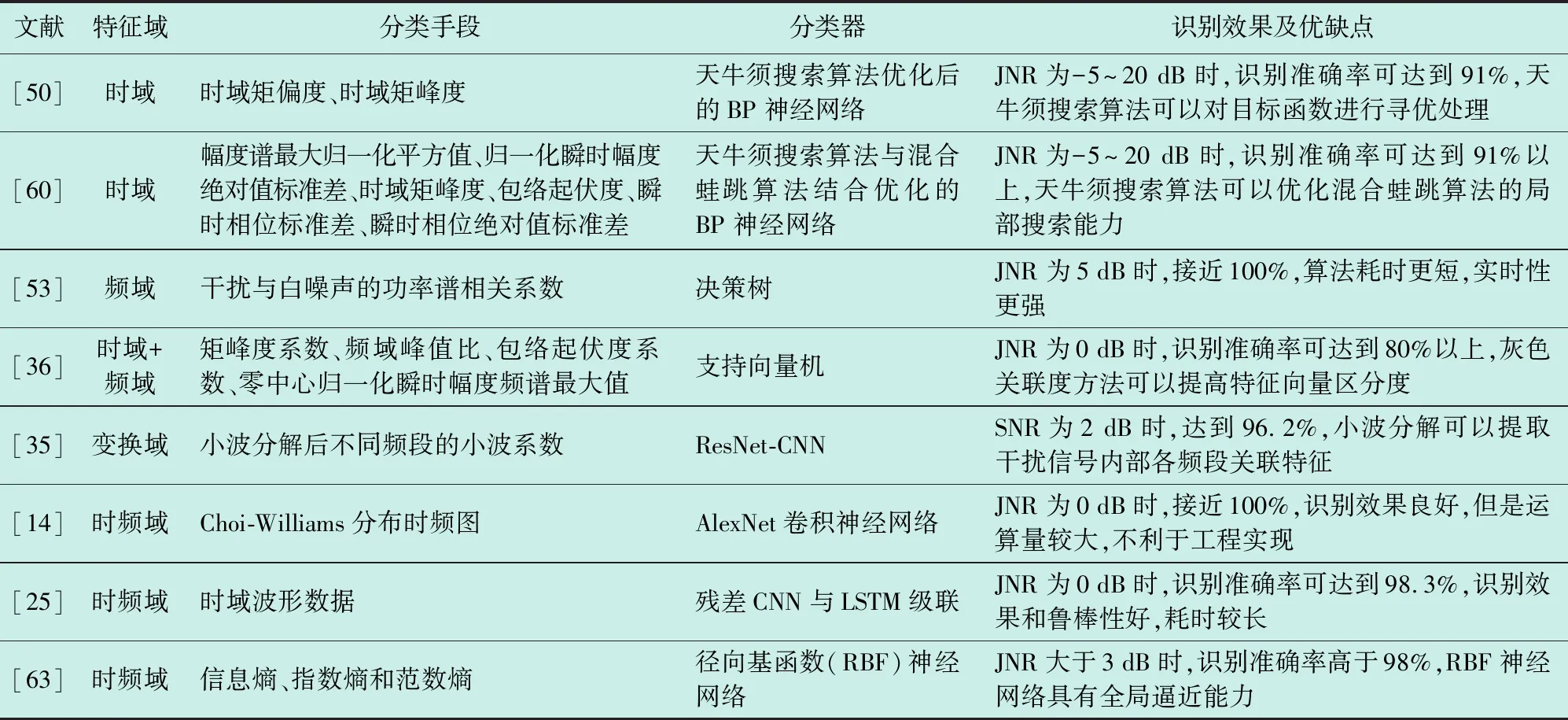
表8 算法说明
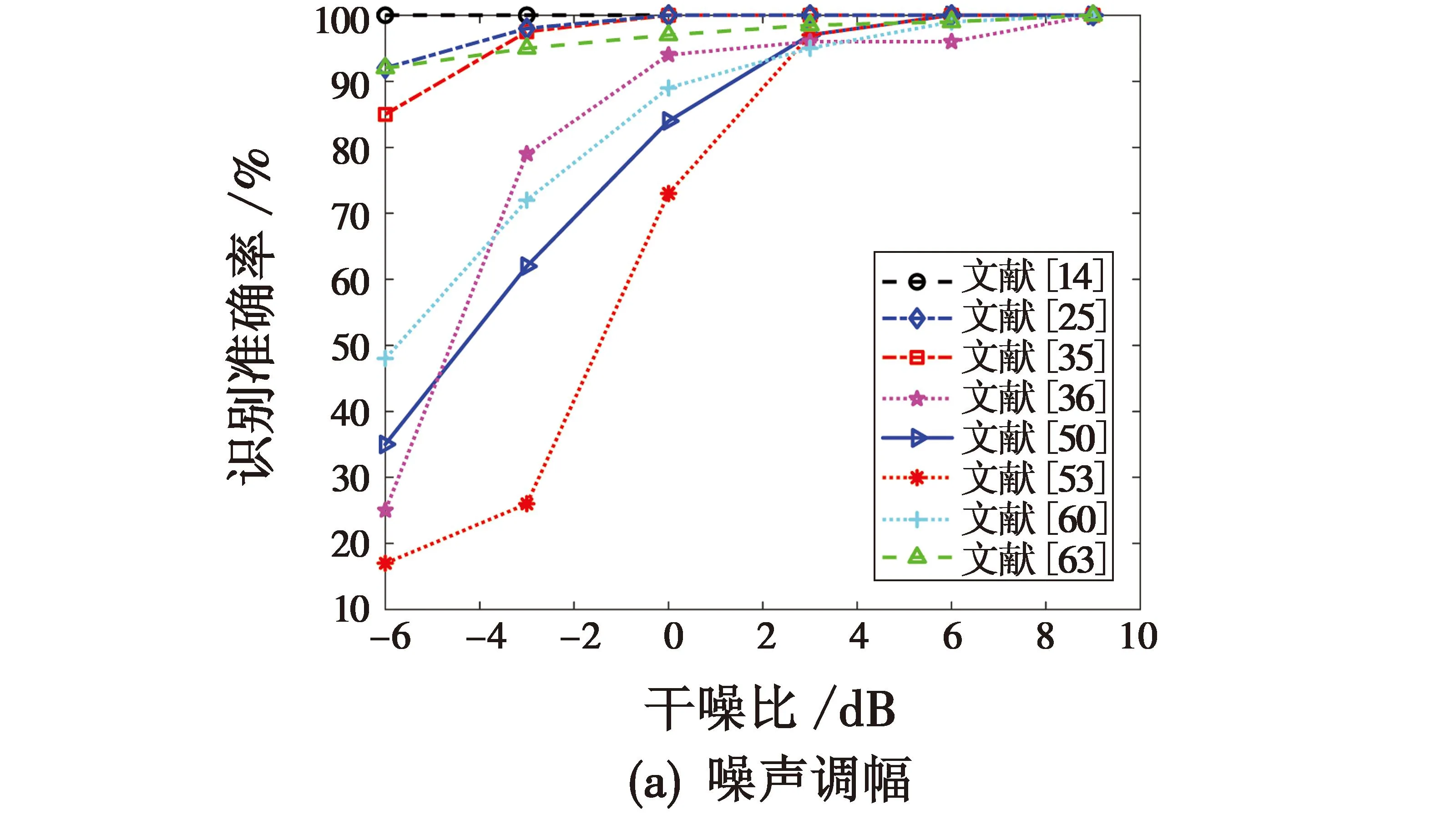
图3 算法识别效果对比
由图3与表8可知,所有文献所采用识别算法的识别准确率与干噪比成正相关,文献[50,53,36,60]与其他文献相比在低信噪比情况下识别准确率较低,是因为上述文献选用的是单一域特征,只能反映出干扰局部信息;文献[36]比文献[50,53,60]识别准确率相对较高是因为增加了频域特征;同为时域特征,文献[60,50,53]识别准确率递减,是因为决策树无法设置精确阈值,识别效果不如能够自主学习的神经网络,混合蛙跳算法通过局部更新能够对BP神经网络起到优化效果;文献[35,63,25]都使用神经网络作为分类器,其识别准确率递增,是因为小波分解虽然可以获取不同频段的细节信息但效果仍不如时频特征,多种神经网络级联可以提高识别效果。文献[14]在所有方法中识别效果最好,充分体现出卷积神经网络处理大数据非线性信息的优势,但其对硬件的要求很高,不利于工程实现。
综上所述,为了提高识别准确率,应选取多域特征;要根据不同的环境选用匹配的信号特征提取方法与分类器;当干噪比较高时,决策树与神经网络识别效果相近,但决策树具有速度快、实时性好的优点;当干噪比较低时,神经网络识别效果明显优于决策树、支持向量机等,但其耗时长,对硬件要求高;深度神经网络算法识别效果好,但是运算量较大,不利于工程实现;选取更高效信号特征提取方法并提升硬件水平将是今后研究的方向。
6 总结与展望
本文依据干扰识别的一般流程,介绍了常见的17种干扰模型,并重点对比了现阶段信号特征提取方法和分类器方面的研究成果。随着DRFM技术发展不断成熟,新的干扰样式不断涌现,现有的干扰识别方法已经不能满足战场需求,未来可以考虑从以下几个方面进行改进和完善:1) 从实战场景出发,克服强噪声环境下信号特征提取困难的问题,重点提高多种复合干扰同时存在时分类识别的效果和鲁棒性;2) 跟进新型干扰技术,进一步研究其干扰机理,将人工智能算法运用于雷达有源干扰识别领域,建立一种不依赖先验知识的、实时性好、对信号特征普适性强的分类识别算法,推动雷达对抗技术向智能化、自主化的方向发展;3) 针对干扰信号数据库样本少的问题,加强在小样本条件下对干扰信号的识别研究;4) 战场中雷达需实时处理的数据量极大,加快雷达的更新换代提高其硬件性能。
