基于事件触发的航空器目标跟踪算法
2024-04-19何文韬
何文韬, 陈 欣
(南京航空航天大学自动化学院,南京 210000)
0 引言
科技的不断进步使得航空器得到了快速的发展,现代航空器已经被广泛应用于农业、工业、军事等领域[1-3]。在航空器速度、高度和航程都得到大幅提升的同时,航空器目标跟踪问题引起了广泛的研究关注。航空器目标跟踪技术可以确定航空器的航迹信息,为航空器的安全飞行提供保障[4]。卡尔曼滤波(KF)是一种估计目标状态的算法[5],在雷达目标跟踪、多传感器信息融合等领域被广泛使用[6-8]。卡尔曼滤波将目标的运动状态建模为一个随机过程,根据传感器的观测值来更新状态估计值。然而,卡尔曼滤波只能应用于线性系统。针对非线性系统,状态估计方法主要有扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)[9-10]。相比较于EKF算法,UKF算法不需要对非线性函数进行线性化处理,因此可以得到更准确的状态估计值,在非线性系统的目标跟踪问题中被广泛使用[11]。
在设计航空器目标跟踪算法时需要考虑到通信通道的带宽限制问题。因此,基于事件触发的通信机制引起了普遍的研究关注[12-13]。目前,事件触发通信机制根据触发条件不同可分为确定型和随机型。文献[14-15]在研究确定型事件触发方法时,通过增加限制条件得到最小均方误差估计器。与确定型事件触发方法相比,随机型事件触发方法无需进行高斯近似就可以保持高斯统计特性[16]。
以上讨论的都是单个传感器的状态估计算法,在实际的应用需求中,为了提高跟踪精度、信息可靠性和系统鲁棒性,需要使用多传感器信息融合技术。在互协方差未知时,协方差交叉(Convariance Intersection,CI)融合算法能获得一致的估计结果[17],但计算量大。因此,研究人员提出了快速协方差交叉(Fast Convariance Intersection,FCI)算法[18-19],可以在减小计算量的同时获得较好的融合精度。
本文提出了一种基于事件触发的航空器目标跟踪算法,主要贡献如下:为了有效地节省通信带宽,引入随机事件触发机制以减少传感器和远程局部估计器的通信次数;局部估计器接收到测量信息后,采用事件触发UKF算法得到局部状态估计值,利用FCI算法融合局部状态估计得到融合估计。
1 问题描述
在实际工程应用中,考虑使用N个传感器来追踪一个航空器的情况,航空器的系统模型和传感器的测量方程为
(1)

2 基于事件触发的航空器目标跟踪算法
图1所示为基于事件触发的航空器目标跟踪算法。
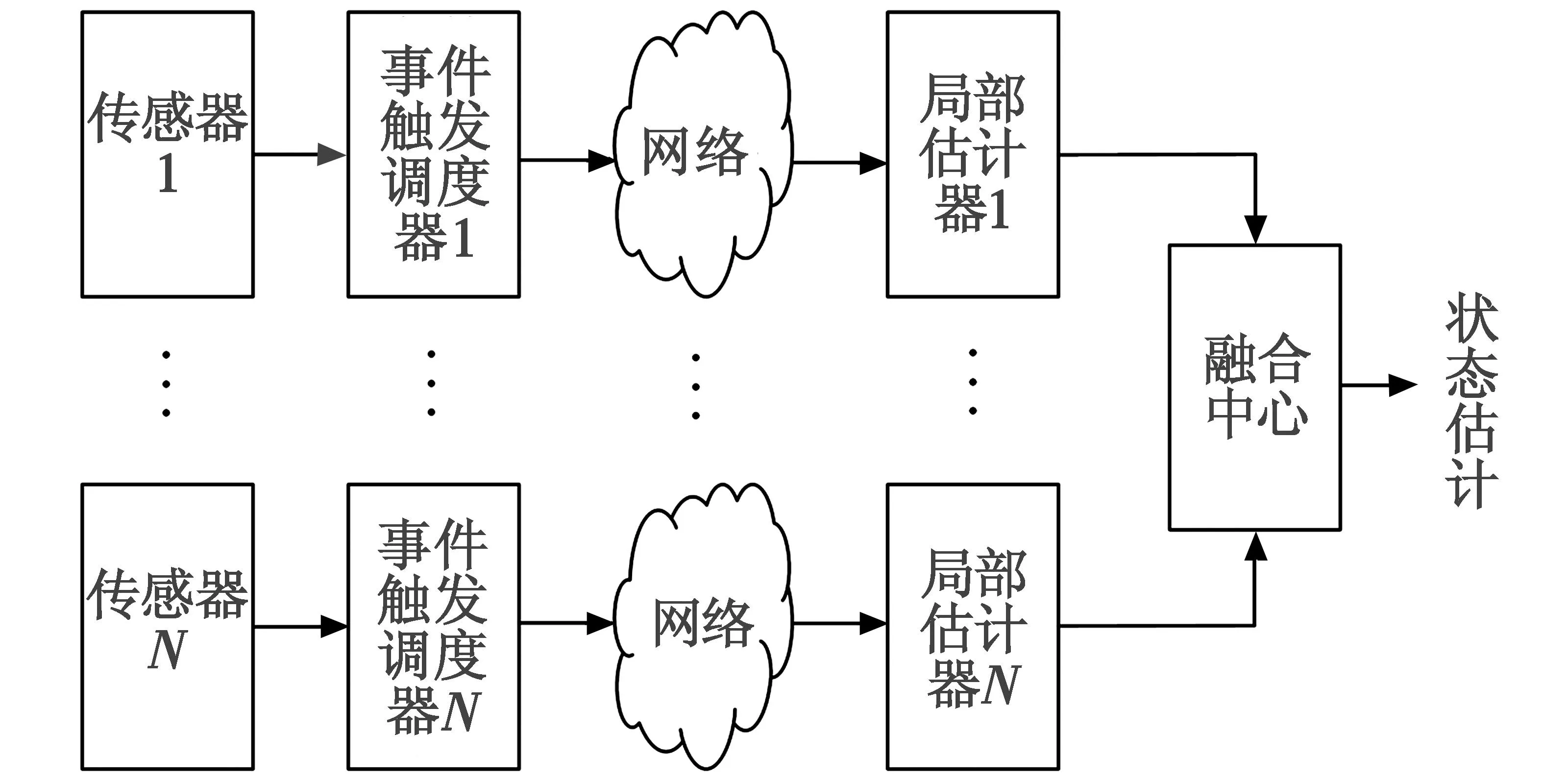
图1 基于事件触发的航空器目标跟踪算法结构图
传感器测量得到航空器的测量信息后,由事件触发调度器决定是否将测量信息通过网络发送给对应的远程局部估计器,各局部估计器计算得到的局部状态估计传输给融合中心,融合中心对局部状态估计进行融合,形成目标最终的状态估计。
2.1 随机事件触发UKF算法
传感器通过无线网络与远程局部估计器之间进行数据传输,降低系统通信频率可以节省通信带宽。考虑到随机事件触发可以保持高斯统计的特性,本文使用了随机事件触发机制,在保证估计精度的同时减少通信次数[13]。随机事件触发机制描述如下。
在每个采样时刻k,数据传输规则为
(2)
在引入随机事件触发机制后,采用以下算法来得到局部估计器的状态估计。
算法1 随机事件触发无迹卡尔曼滤波算法。
1) 计算Sigma点。
(3)

2) 计算k+1时刻的状态估计及其协方差。
(4)
(5)

(6)
(7)
(8)
(9)

(10)
3) 计算增益矩阵。
(11)
4) 进行状态更新和估计误差协方差更新。
(12)
(13)

5) 在下一个采样时刻重复步骤1)~4)。
2.2 基于快速协方差交叉的融合方案
得到局部状态估计和估计误差协方差后,在融合中心使用快速协方差交叉方法计算融合状态估计和融合估计误差协方差
(14)

至此,完整的基于事件触发的航空器目标跟踪算法流程如下。
算法2 基于事件触发的航空器目标跟踪算法。
2) 按照式(14)计算融合后的状态和相应的误差协方差。
3) 在下一个采样时刻重复步骤1)~2)。
需要说明的是,所设计的快速协方差交叉融合算法在结构上是并行的,便于单个传感器传输通道的故障检测与隔离。另外,相比较于协方差交叉融合算法,本文所使用的融合算法避免了局部估计器之间的互协方差矩阵的计算,因而能够应用于互协方差矩阵未知或者实时性要求较高的目标跟踪系统。
3 仿真分析
采用一个航空器目标跟踪实例来验证所提出的算法的有效性和实用性。用4个传感器(探测雷达)对航空器进行感知和跟踪,每台探测雷达可以得到航空器相对于探测雷达的距离、俯仰角和偏航角。探测雷达根据随机事件触发条件选择是否将测量信息传输给对应的远程局部估计器,远程局部估计器采用事件触发无迹卡尔曼滤波算法得到状态估计后,使用快速协方差交叉融合算法对局部状态估计进行融合。
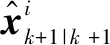
航空器做匀速协同转弯运动,转弯率Ω=3 rad/s,采样间隔T=1 s,运动模型为
(15)

探测雷达的测量方程为
(16)


x0|0=[1000 m,50 m/s,1000 m,0 m/s,1000 m]T;
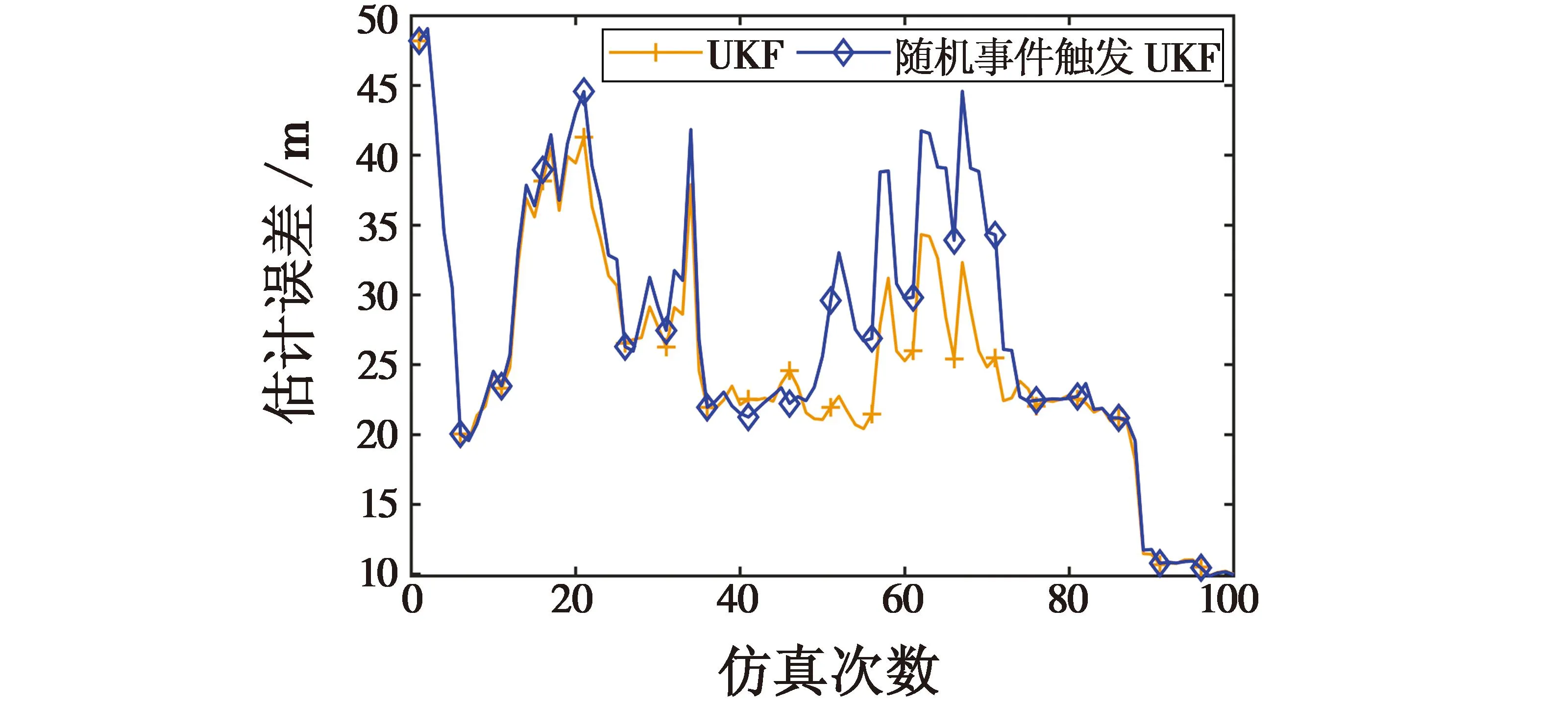
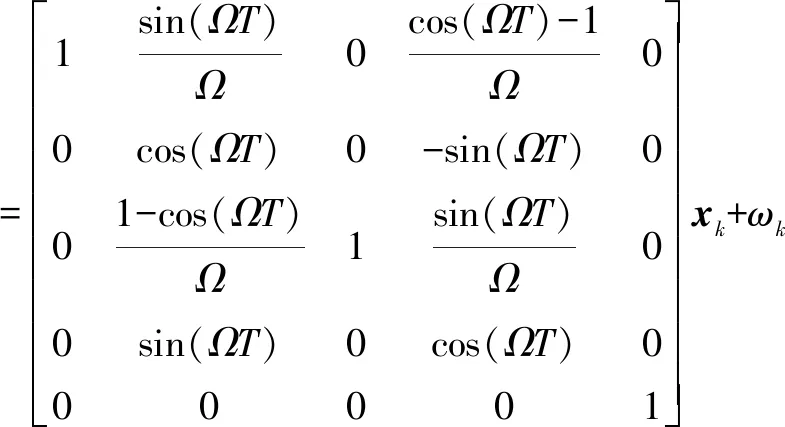
图2 传感器1随机事件触发UKF和UKF的估计误差
由于引入了随机事件触发机制,随机事件触发UKF的估计误差比UKF稍大,但是在100次仿真中,随机事件触发UKF的通信次数为83,UKF的通信次数为100,随机事件触发UKF节省了通信带宽。
图3为4个传感器的局部估计误差与融合估计误差对比。
图3 融合估计和局部估计的估计误差
图4为本文算法的真实轨迹与融合估计轨迹对比。
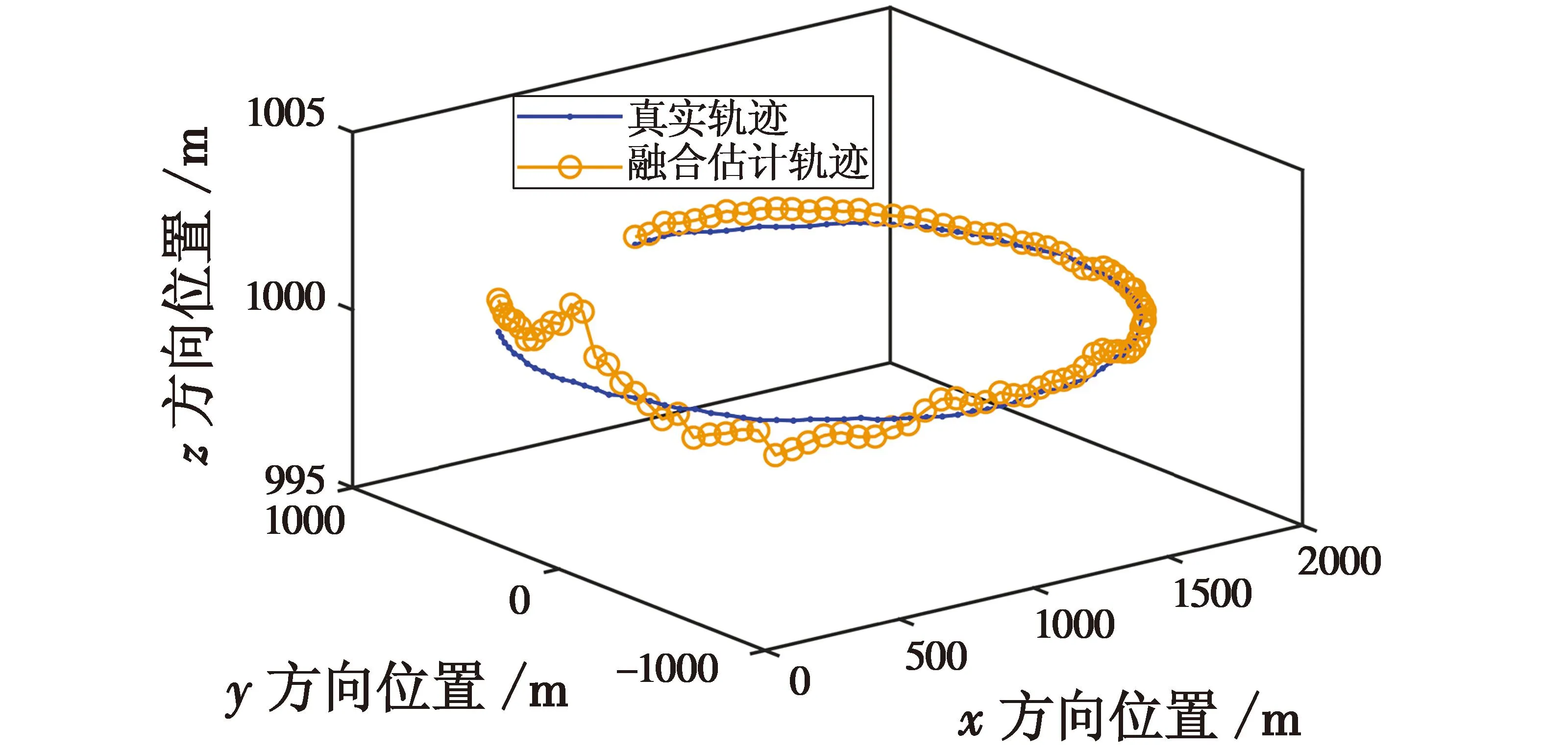
图4 真实轨迹和融合估计轨迹
从图3、图4可以看出,本文算法的估计误差小于所有单个传感器节点,而与CI融合算法相比,也具有更小的估计误差。这表明本文提出的航空器目标跟踪算法具有较好的跟踪精度,可以完成对航空器的跟踪。
4 结束语
本文提出了一种基于事件触发的航空器目标跟踪算法,用于具有带宽限制的航空器目标跟踪系统。为了减少通信带宽的占用,引入了随机事件触发机制。然后,使用事件触发无迹卡尔曼滤波器得到局部状态估计,并利用快速协方差交叉技术完成局部状态估计的信息融合。通过航空器目标跟踪的仿真实例验证了所提算法的有效性。需要指出的是,工程实践中的航空器目标跟踪算法还需要考虑传感器搜索覆盖、传感器调度等问题,在未来会进一步研究这些问题。