广域空间感知敏感器光学系统设计
2024-04-15杜伟峰王燕清郑循江孙少勇毛晓楠曲耀斌吴泽鹏
杜伟峰,王燕清,郑循江,孙少勇,毛晓楠,曲耀斌,吴泽鹏
(1 上海航天控制技术研究所,上海 201109) (2 上海卫星工程研究所,上海 201109)
0 引言
由于地球卫星轨道资源的限制,抢先占领特定轨道和区域很有意义,因此全球主要的航天大国都在发展低轨道巨型星座卫星[1-6]。一方面空间轨道中的卫星数量增加,存在相互之间碰撞的风险,中国空间站在最近一年已经对Starlink 采取了两次规避;另一方面随着废弃飞行器等太空垃圾越来越多,其对正常卫星的潜在碰撞风险也在增大。因此未来的卫星和航天飞行器需要具备通过对卫星、空间碎片和小行星等空间目标进行空间感知来实现对太空飞行器的观测、告警和规避功能。
由于感知敏感器在轨工况的特殊性,使得其兼备光学相机与星敏感器的双重性能。2015 年,孟庆宇设计了一款用于深空探测的宽谱段大视场小型光学系统,其相对孔径为1∶7.5,工作波段为400 nm~900 nm,全视场为60°,在70 lp/mm 处的MTF 不低于0.45[7]。2016 年,孟庆宇设计了一款轻小型立体成像相机光学系统,该系统相对孔径为1∶6.8,全视场为66°,工作波段为450 nm~750 nm,在78 lp/mm 处的MTF 不低于0.49,可在250 km 轨道高度实现像元分辨率为50 m 的立体成像[8]。2019 年,孟祥月设计了一款大相对孔径宽光谱星敏感器光学系统,工作波段为500 nm~800 nm,相对孔径为1∶1.25,全视场约为12°,可灵敏到7.5 等星[9]。2021 年,朱杨设计了一款相对孔径为1∶1.1,全视场为17°,工作波段为550 nm~650 nm 星敏感器光学系统,可灵敏到7 等星[10]。2023 年,焦建超设计了一款轻型高灵敏暗弱空间目标探测光学相机,相对孔径为1∶2.3,全视场为8°,工作波长为400 nm~700 nm,可灵敏到13 等星[11]。
在上述设计实例中,光学相机的MTF 在70 lp/mm 达到0.45 以上,光机系统分辨率可满足航天应用,但是以分辨率为依据选择有效口径,会导致对恒星探测灵敏度不高;星敏感器光学系统可以实现高星等被探测,但是视场相比相机较小,并且对面目标无MTF 技术要求。鉴于上述光学系统应用在航天态势感知上存在的短板,本文设计了一款广域空间感知敏感器光学系统,地面外场测试灵敏度可达到6.4 等星,在15 m 处其成像分辨率可以达到5.8 mm。
1 指标论证
1.1 总体设计要求
某广域空间感知敏感器根据其应用背景需求,其总体设计指标如表1 所示。

表1 总体技术指标要求Table 1 Overall technical specification requirements
1.2 目标在观测点处辐照度分析
非合作目标可以等效为经典的球体模型,如图1 所示。Β为太阳光与目标连线、目标与观察点连线形成的夹角。光照表面积S推导如式(1)所示。
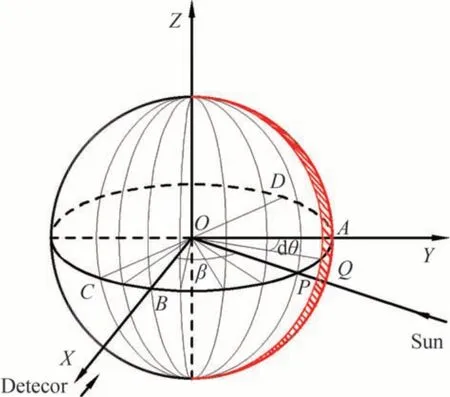
图1 球体受照辐射表面模型Fig.1 Illuminated surface model of a sphere
式中,r为球体半径。此时,对于距离目标为R的观察点,接收到的辐照度如式(2)所示。
式中,Esun0为太阳辐照度,ρ为目标反射率,E为目标入射至观察点处的辐照度。对式(2)仿真,仿真输入条件见表1,得出目标在不同太阳光夹角下的等效星等,见图2。在120°时,目标等效星等约为6.0 Mv。

图2 目标在不同太阳光夹角下等效星等Fig. 2 Equivalent magnitudes of targets at different solar incidence angles
1.3 分辨率分析
根据表1,要求光学系统在15 m 处分辨率小于10 mm。分辨率计算如式(3)所示。
式中,GSD为工作距离处分辨率,L为工作距离,a为探测器像元,f'为相机焦距。将要求代入式(3),有像元与焦距的比值小于等于0.000 67。
一阶近轴物像关系如式(4)所示,其中x为物距,x'为像距。不同焦距下物像关系的仿真结果如图3 所示。在光学系统焦距确定的条件下,适当调整焦面位置可探测不同物距;当物距发生变化后,焦距越长,像面位置变化范围越大。因此,对于广域空间感知敏感器,既需要探测到点目标,又需要分辨有限远目标,物距跨度很大,光学系统焦距不宜过长。

图3 牛顿公式Fig. 3 Newton's formula
1.4 光学系统指标论证
根据上文对探测器像元尺寸的限制,同时考虑量子效率、光谱、噪声等相关信息,选择新型微光成像器件:电子轰击有源像素传感器(Electron Bombarded Active Pixel Sensor, EBAPS),该器件结合真空光电器件与固体数字化器件的优点,微弱光入射到探测器光电器件后阴极产生光电子,通过高压加速轰击,产生的电信号经过后端电路采样和放大,最后被读出进行图像处理和显示。EBAPS 将数字技术与微光夜视技术相结合,同时兼顾了高探测率和数字化输出的优点,为新型数字化微光探测技术的发展提供了新的方向[12-13]。器件技术参数如表2 所示。

表2 探测器参数Table 2 Detector parameters
空间感知敏感器不仅要实现定姿功能,同时还要实现目标搜索功能,因此目标等效星等制约了光学系统有效口径[14-17]。由1.2 节可知,目标在观察点处的辐照度为6.0 Mv,考虑设计余量,设计输入为6.5 Mv,其在光学系统焦面处单像素的电子数由式(5)计算。
式中,τ为光学系统透过率,E't为6.5 等星在500 nm~800 nm 波段区间内辐照度,其计算公式如(6)所示;D为光学系统通光口径;t为积分时间;λ为参考波长,此处为650 nm;h为普朗克常数;c为光速;q为量子响应效率;Se为单像素电子数。
式中,λ1为起始波长,λ2终止波长;T为温度;c1=3.741 8×10-16W·m2为第一辐射常数;c2=1.438 8×10-2m·K 为第二辐射常数;E6.5为6.5 Mv。光电系统信噪比计算式如(7)所示,仿真获得不同通光口径随积分时间信噪比曲线,如图4 所示。

图4 信噪比与积分时间关系Fig.4 Relationship between SNR and integration time
式中,SNR为信噪比,一般要求SNR≥5;Se为参与计算的电子数;N为探测器总噪声;σdark为暗电流噪声;σr为读出噪声;σnun为非均匀性噪声的均方值;σfpn为固定模式噪声的均方值,综合考虑信噪比、积分时间、F数等因素,最终选定有效口径为8 mm,积分时间为80 ms。光学系统设计要求见表3。

表3 光学系统设计参数Table 3 Optical system design parameters
2 光学系统设计
2.1 光路设计
广域空间感知敏感器光学系统特点是视场大、像元尺寸小,其在轨工况需要感知非合作目标,因此需要边缘和中心视场灵敏度保持一致,本文选择的探测器具有分区域增益功能,可以补偿边缘视场相对照度低的技术问题;同时,在光学设计过程中,需要引入负渐晕,补偿边缘能量损耗。光路设计最终状态如图5 所示,由16 片镜子、一片探测器玻璃盖片构成。为平衡像质,根据赛德尔像差理论,将孔径光阑设置在中前段处。主光线入射角为8°,满足系统设计要求。

图5 光路图Fig.5 Optical path
传统相机设计时需要重点考核MTF,对弥散斑形状要求不高;星敏感器设计时重点考核弥散斑形状与能量集中度,对MTF 不作要求;因此在设计时需要兼顾两项指标。弥散斑反映出二维状态下光斑形态、能量集中度等信息,如图6 所示,各个视场弥散斑均匀性良好,最大偏差为1.2 μm。

图6 弥散斑Fig. 6 Spots
MTF 如图7 所示。在无限远处,50 lp/mm 在0.75 以上;在30 m 处,50 lp/mm 在0.6 以上,此时对应的物体分辨率为17.8 mm 以下;在20 m 处,50 lp/mm 在0.5 以上,分辨率不大于10.68 mm;在15 m 处,50 lp/mm在0.4 以上,分辨率不大于5.8 mm。

图7 不同距离下MTFFig. 7 MTF at different distances
光学系统畸变如图8 所示,最大畸变不超过-0.55%,由于光路上的畸变校正会影响像面照度,因此对装配好的光机系统在实验室条件下进行畸变算法校正,最终畸变精度可达到0.05%。
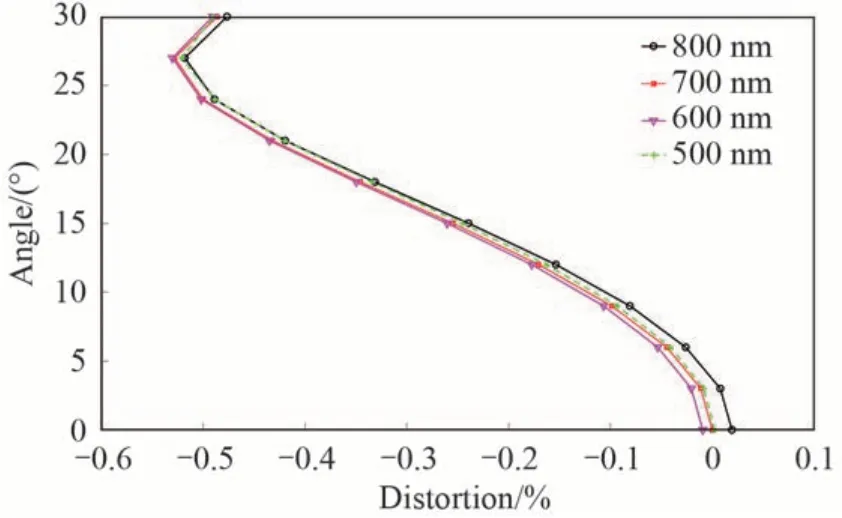
图8 畸变Fig. 8 Distortion
能量集中度如图9 所示,12°视场处弥散斑100%能量集中在10 μm 以内,24°视场处100%能量集中在12 μm 以内;30°视场处,100%能量集中在15 μm 内。

图9 能量集中度Fig. 9 Energy concentration
倍率色差如图10 所示,500 nm 相对650 nm 的倍率色差最大值小于1.2 μm;500 nm 相对800 nm 的倍率色差最大值小于-1.0 μm。

图10 倍率色差Fig.10 Lateral color
光学系统相对照度如图11 所示,30°处边缘相对中心照度为73%,余弦四次方照度理论值为56%。

图11 相对照度Fig.11 Relative illuminance
2.2 低灵敏度公差设计
对于本文设计的广域光学系统,第一步采用“θ-Segmentation”降敏设计方法[18-22],对光路中每个镜面边缘视场的入射角进行优化,构建以入射角平方和为核心的低敏感度误差控制函数,如式(8)所示。
式中,Φ是以控制入射角为核心的低灵敏度误差控制函数;s为光学系统中镜面个数;is为各个镜面入射角。第二步,在降敏迭代优化过程中,引入折射角控制,搜索更为广泛的优化空间,如式(9)所示。
式中,θ是以控制入射角和折射角为核心的低灵敏度误差控制函数;rs为各个镜面折射角。第三步,开展公差分析与光束入/折射角度迭代:以公差分析的结果,重点优化对光学像质下降影响最大的镜面入/折射角,同时放开对光学像质下降影响小的镜面入/折射角,最终光路入/折角度如图12 所示,优化后的光路最大入射角不超过32°,最大折射角不超过30°。
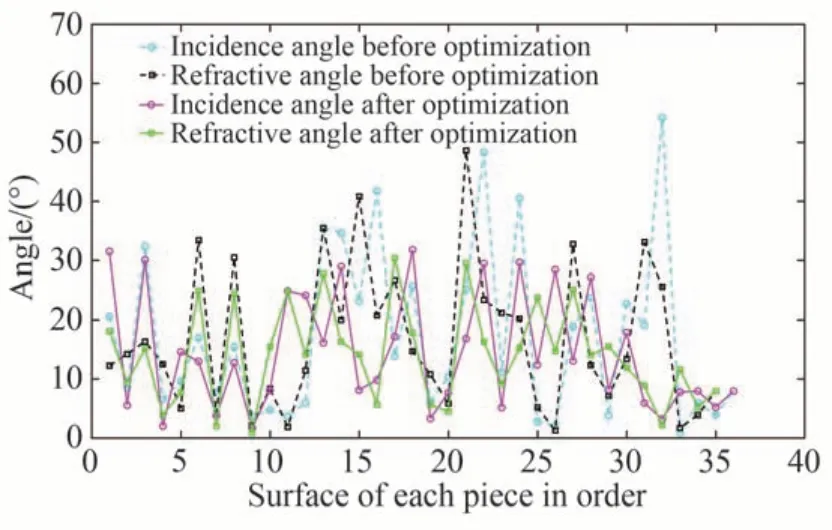
图12 入射角与折射角优化Fig. 12 Beam angle before and after optimization
经灵敏度分析后,24°视场内公差比较松,30°视场公差相对比较紧,初始给定加工公差如表4 所示,装配公差如表5 所示。
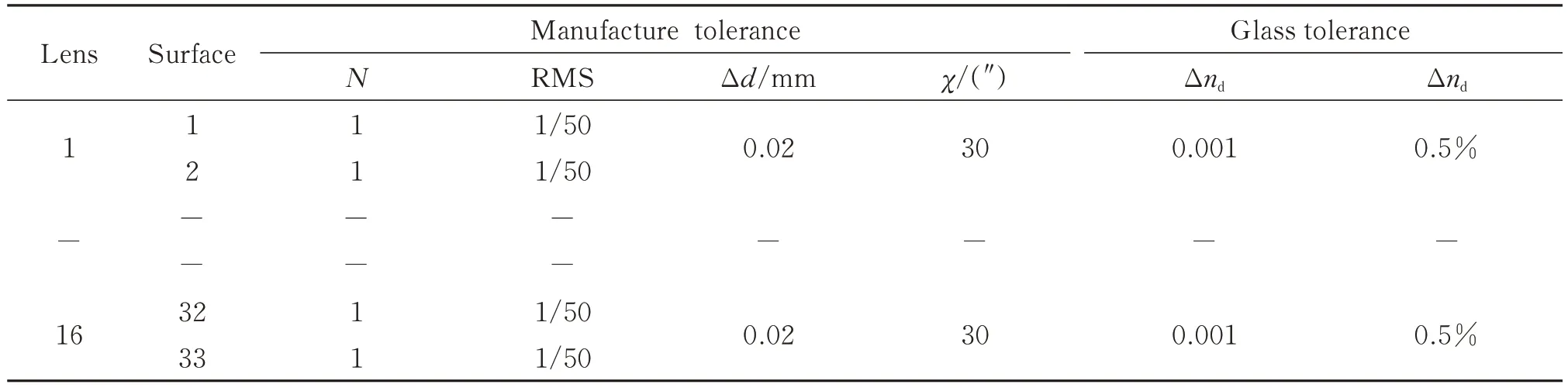
表4 光学系统制造公差Table 4 Manufacture tolerance of optical system

表5 光学系统装调公差Table 5 Alignment tolerance of optical system
在焦面处,公差对MTF 的影响如图13 所示,对于点目标,中心视场的MTF 由0.74 下降至0.7,边缘视场的MTF 由0.68 下降至0.51,如图13(a)所示;对于15 m 处的面目标,中心视场的MTF 由0.45 下降至0.36,边缘视场的MTF 由0.57 下降至0.36,24°视场的MTF 最差,约为0.3,如图13(b)所示。
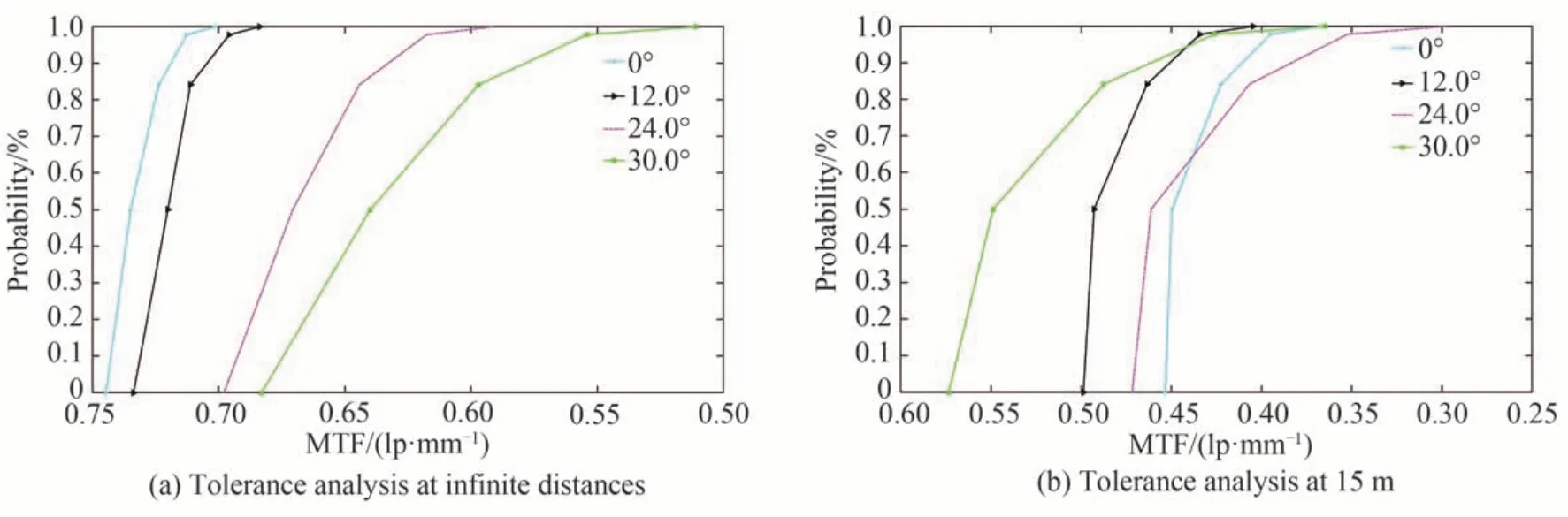
图13 焦面处公差分析Fig.13 Tolerance analysis at the focal plane
显然,15 m 工作距离处的MTF 未达到表3 技术要求。鉴于点目标的MTF 在最坏情况下不小于0.51,面目标MTF 在最坏情况下不小于0.36,对整个光学系统进行离焦,离焦量为0.01 mm,从而平衡点目标与面目标公差之后的MTF,如图14 所示,图14(a)为点目标的MTF,中心视场MTF 由0.77 下降至0.74,边缘视场MTF 由0.64 下降至0.47;图14(b)为15 m 工作距离处MTF,中心视场由0.57 下降至0.5,边缘视场由0.64下降至0.46,24°视场的MTF 像质最差,MTF 约为0.41。图14 所示的MTF 均满足表3 所要求的≥0.4 技术要求。
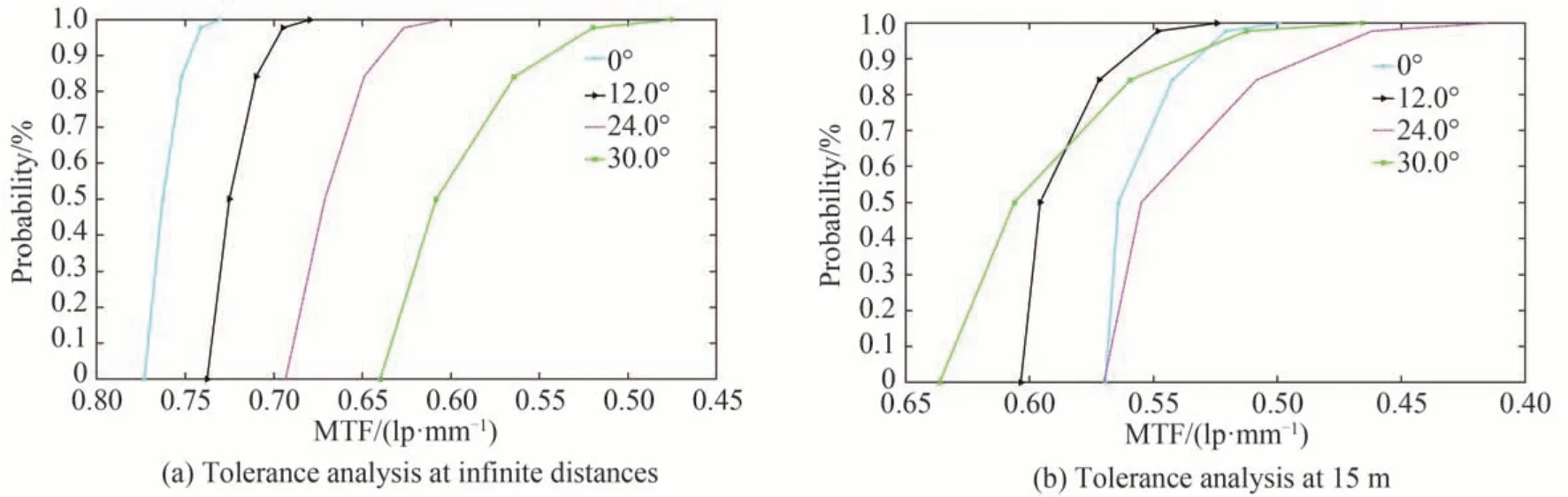
图14 离焦0.01 mm 处公差分析Fig.14 Tolerance analysis at 0.01 mm out of focus
离焦会导致星点能量集中度下降,降低探测灵敏性,因此需要分析离焦量对光电系统的影响。假设光学系统艾利斑半径为rAd,对于光电系统(光学系统与探测器耦合)艾利斑如式(10)所示。
式中,a为探测器像元尺寸。由图15 可知,艾利斑与焦深的关系如式(11)所示。

图15 艾里斑与焦深Fig. 15 Airy spots and depth of focus
式中,u'为光学系统像方孔径角。光电系统焦深如式(12)所示。
根据光电系统焦深计算公式,光学系统F数为3,像元尺寸为4.5 μm,光电系统焦深范围为±27 μm,大于10 μm,因此该离焦量不会对星点灵敏度造成影响。
3 试验验证
3.1 镜头性能测试
在传函仪上装配好镜头,开展光学性能验证,如图16 所示,该传函仪为德国全欧光学研制,相比标准化的传函仪,转台定位精度优于1.0″,光学性能测量精度更高。

图16 传函仪Fig.16 Transfer function measuring instrument
镜头焦距为23.4 mm,使用焦距为300 mm 的光管输出平行光,测试光谱范围为500 nm~800 nm。测试步骤为:1)将待测试的镜头以法兰安装的方式固定在传函仪上(传函仪安装面已经与平行光管的夹角进行校准);2)将传函仪光路接收面靠近待测镜头,使通过待测镜头的光束汇聚到接收面;3)粗调待测镜头后工作距离,使之清晰成像;4)调节待测镜头与平行光管的偏心,使之偏心在10 μm 以内;5)利用传函仪自带的软件精密调节待测镜头焦面;6)离焦0.01 mm;7)镜头检测。
图17(a)为MTF 测试曲线,T1 为无穷远处子午面传递函数,S1 为无穷远处弧矢面传递函数,T2 为15 m处子午面传递函数,S2 为15 m 处弧矢面传递函数。从图17(a)可知,光学系统传递函数无论是针对无穷远还是有限远工作距离,其传递函数均大于0.4,满足设计要求;图17(b)为相对照度测试,边缘视场的照度为中心视场的72%;图17(c)为畸变测试,最大畸变为-0.58%;图17(d)为主光线入射角测试,边缘处最大入射角为8.25°;图17(e)为能量集中度测试,在13.5 μm 弥散斑直径内能量集中度不小于90%;17(f)倍率色差测试,500 nm 与800 nm 波长的倍率色差的绝对值在全视场范围内不超过1.53 μm。所有测试数据均满足表3 技术要求。

图17 测试数据Fig. 17 Test data
3.2 外场观星测试
广域空间感知敏感器外场测试如图18 所示,图18(a)为试验现场图,广域空间感知敏感器安装在伺服机构,将两个光学头部用于视场拼接与数据融合,实现测量精度的提升;图18(b)为拍摄的星图;图18(c)为图18(b)中极限探测恒星,质心坐标位于(3 244,4 025),极限探测恒星ID 为70 236,为6.4 Mv;图18(d)为单独头部的测量精度曲线,测角精度均值为0.7″,3σ 置信区间为2″~3″。
4 结论
广域空间感知敏感器需要对实现非合作暗弱目标捕获、对恒星输出姿态信息、对近距离空间目标实现高分辨率清晰成像,在此应用的需求背景下,本文论证了光电系统核心技术参数,基于论证分析结果研制了一款高性能广域空间感知敏感器光学镜头,设计F数3.0,全视场60°,15 m 处对物体分辨率不大于5.8 mm。定心装配后,光学系统对点目标以及15 m 处面目标的MTF 在50 lp/mm 处均不小于0.4,边缘视场相对照度为中心视场的72%,最大畸变为-0.58%,边缘视场主光线入射角为8.25°,在13.5 μm 弥散斑直径内能量集中度不小于90%;倍率色差绝对值为1.53 μm。外场观星测试表明,广域空间感知敏感器地面灵敏度为6.4 Mv,测角精度均值为0.7″,3σ 置信区间为2″~3″。本文关于光学系统指标分析方法、光学系统设计方法以及测试验证方法可为其他光电类敏感器提供一定参考。