现代建筑物点云平面特征识别方法
2024-04-15王新静段晨鑫姚怡烨
王新静 段晨鑫 姚怡烨
摘 要:【目的】基于现代建筑物点云数据面片特征,提出一种基于随机抽样一致算法的平面分割识别方法。【方法】该方法先利用三维格网划分来建立空间格网单元,再根据随机采样点来确定局部格网单元,通过随机机制来拟合平面模型,经过局部打分来确定候选模型集,利用法向约束和共面分割来解决过分割和欠分割的问题。【结果】采用该方法可获取当前最优模型和一致集,并完成点云分割。【结论】试验结果表明,该方法能对富有平面特征的建筑物进行有效分割。
关键词:点云;分割;局部采样;一致集
中图分类号:TP391 文献标志码:A 文章编号:1003-5168(2024)04-0004-05
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.04.001
The Plane Feature Recognition Method for Modern Building Point Cloud
WANG Xinjing DUAN Chenxin YAO Yiye
(North China University of Water Resources and Electric Power, Zhengzhou 450046, China)
Abstract: [Purposes] According to the patch characteristics of modern building point cloud data, a plane segmentation recognition method based on random sampling consistent algorithm is proposed in this paper. [Methods] In this method, the spatial grid element is established by three-dimensional grid division, and then the local grid element is determined according to the random sampling points, the plane model is fitted by random mechanism, and the candidate model set is determined by local scoring. Normal constraints and coplanar segmentation are used to solve the problems of over-segmentation and insufficient segmentation. [Findings] Finally, the current optimal model and consistent set are obtained, and the point cloud segmentation can be completed. [Conclusions] The experimental results show that this method can segment the buildings with plane features effectively.
Keywords: point cloud; segmentation; local sampling; consistent set
0 引言
激光雷達技术是一种新型的高精度、多领域三维数据采集技术,使用三维激光扫描技术能获取点云数据,并基于此来建立各种三维模型,从而被广泛应用于文物保护[1]、地形测绘[2]、城市建筑测量[3]、大型构筑物[4]等领域中。对研究对象进行扫描,获取的数据多为分布不均匀且数据量极大的点集,从这些数据中提取出有效的特征信息就显得格外重要。在进行数据处理过程中,如果特征提取效果比较符合要求,相应的运行时间就会延长,如果分割速度过快,相应准确度则降低。所以,本研究旨在寻找出一种能有效且快速识别出建筑物平面特征的方法。
区域生长(Region growing)算法[4]是一种迭代方法,多用于分割复杂影像,但对硬件要求高,空间和时间开销较大;基于聚类的点云分割(Cluster Analysis)算法[5]简单,可发现任意形状的簇,处理速度快,但对噪音不敏感,精确性不高,对较小数据量的分割效果不好;基于边缘的点云数据分割[6]具有较高的分割速度,但受点云分布不均匀和误差的影响,很难检测出连续边界;随机采样一致性算法(RANdom SAmple Consensus,RANSAC)[7]能鲁棒的估计模型参数,但计算参数的迭代次数设置人为因素大。所以,本研究使用一种基于随机抽样一致性算法的局部采样优化点云分割方法,实现对平面特征的有效识别。
本研究重点研究以下3个方面内容:①基于海量点云数据建立空间索引;②对冗余的点云数据进行分割;③实现一种优于随机采样一致算法(RANSAC)的自动识别点云平面特征的算法。
1 地面激光三维扫描数据处理
点云数据在分割前需要进行处理。①为了提高邻域搜索效率,使用全局格网划分建立邻域关系;②计算各点的法向量。
1.1 全局格网划分
先将所有点云数据统一划分为网格,再采用文献[8]中的方法,使用k-d树来构造每个数据点的邻域关系。网格结构设计步骤包括确定最小包围框、确定最小边长、确定编码和编码值。
1.1.1 确定最小包围框。虽然点云数据体量较大,但仍然属于有限个点集范畴。所以,有限个离散点总能确定一个最小的包围框,包括所有离散点,有且仅有一个中心o点。这样就可确定最小包围框,并以o为原点来建立起三维直角坐标系,分别确定X、Y、Z的最大值与最小值,与原点o结合,可计算出最小包围框的各个边长(IX、IY、IZ)[8]。
1.1.2 确定最小边长。最小边长是指网格结构划分后的子块,由最小边长可确定网格结构划分后的个数。所以,最小边长不能太小,否则会导致数据量过大,无法达到预期优化效果;最小边长也不能过大,因为点云数据是离散的点,过大会导致建立拓扑关系的难度加大。有学者提出了一种评估最小边长的方法[9],最小包围框的体积见式(1)。
V = IX×IY×IZ (1)
点云密度ρ为散乱点的个数N与V的比值,见式(2)。
ρ=N/V (2)
由于使用的最小边长有限制,格网划分后的小立方体边长见式(3)。
[L=λ/ρ3] (3)
式中:λ为比例因子;ρ为点云密度;L为最小边长。
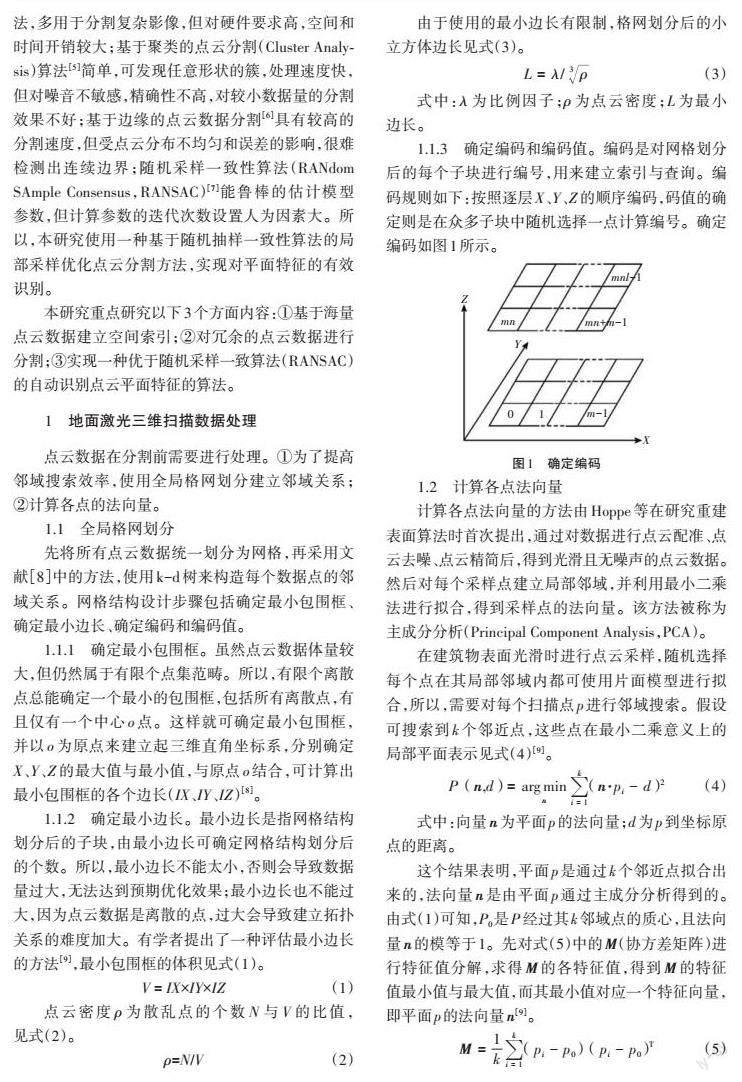
1.1.3 确定编码和编码值。编码是对网格划分后的每个子块进行编号,用来建立索引与查询。编码规则如下:按照逐层X、Y、Z的顺序编码,码值的确定则是在众多子块中随机选择一点计算编号。确定编码如图1所示。
1.2 计算各点法向量
计算各点法向量的方法由Hoppe等在研究重建表面算法时首次提出,通过对数据进行点云配准、点云去噪、点云精简后,得到光滑且无噪声的点云数据。然后对每个采样点建立局部邻域,并利用最小二乘法进行拟合,得到采样点的法向量。该方法被称为主成分分析(Principal Component Analysis,PCA)。
在建筑物表面光滑时进行点云采样,随机选择每个点在其局部邻域内都可使用片面模型进行拟合,所以,需要对每个扫描点p进行邻域搜索。假设可搜索到k个邻近点,这些点在最小二乘意义上的局部平面表示见式(4)[9]。
[P(n,d)=argminni=1k(n·pi-d)2] (4)
式中:向量n为平面p的法向量;d为p到坐标原点的距离。
这个结果表明,平面p是通过k个邻近点拟合出来的,法向量n是由平面p通过主成分分析得到的。由式(1)可知,P0是P经过其k邻域点的质心,且法向量n的模等于1。先对式(5)中的M(协方差矩阵)进行特征值分解,求得M的各特征值,得到M的特征值最小值与最大值,而其最小值对应一个特征向量,即平面p的法向量n[9]。
[M=1ki=1k(pi-p0)(pi-p0)T] (5)
2 点云数据索引构建
原始数据只有简单的三维坐标,并不具有拓扑关系。为方便基于领域的快速查找与建模,需要通过空间索引来建立拓扑关系。
使用三维栅格建立索引的关键在于设置任意一个大于0的数值δ和在三维坐标系中找到X、Y、Z的最大值(Xmax,Ymax,Zmax)与最小值(Xmin,Ymin,Zmin)。与邻域概念相似,取坐标值(Xmax+δ,Ymax+δ,Zmax+δ)和(Xmin+δ,Ymin+δ,Zmin+δ)的亮点为对角点,且以边长平行于坐标轴的方向来构建长方体的包围盒,并将边界盒划分为小网格,小网格边长设为α,点云数据的边界盒以α为间隔,沿坐标轴方向划分为空间独立的六面体网格,使点云中每个空间点没有拓扑关系的数据具有相应的空间立方体网格,从而完成点云数据的索引。对不同大小的点云数据,可设置不同的网格大小α来划分点云数据,从而灵活地控制点云数据领域的索引范围。由于空间点是通过网格索引得到的,因此,需要对网格进行排序,从而提高点云数据的索引效率。
3 基于RANSAC的点云分割
3.1 RANSAC方法原理
RANSAC是在计算机视觉领域中广泛应用的一种随机采样一致性算法。在进行分析和三维建模时,选择合适的模型和正确的模型参数是学者们最关心的,也是算法中最重要的一步。采用随机抽样法可删除无效点,避免其对集合产生影响,产生的子集都是由有效点组合而成的[10]。RANSAC方法原理如下:在估计参数具体问题时,根据需要预先设定一个评判标准,不断删除数据;然后使用判断标准不一致的参数估计,反复使用判断标准;最后通过有效的输入数据删除后来估计准确的参数。规定某一置信概率,基本子集的最小抽样数M和获得至少一个正确子集P(P>ξ)的概率满足的关系见式(6)[10]。
P=1-[1-(1-ξ)m]M (6)
式中:ξ为错误的数据概率;m为参数估计的最小数据量;M为基本子集最小抽样数;P为至少取得一个良性取样子集的概率,一般取值为0.9~0.99。
3.2 霍夫变换算法原理
霍夫变换[11](Hough)是在原始图像空间或点云数据处理中,根据点与线之间的對偶性,将给定曲线的检测问题转换成参数空间各点。转换后的问题发生变化,即不再是原始图像存在的曲线问题,而是在参数空间计算峰值的问题。通过简单的阈值就可确定目标,从而提高效率。由于RANSAC方法不能很好地解决噪声干扰问题,而霍夫变换在检测直线或圆时,通过简单的转化,可有效避免噪声的干扰。以线性检测为例,霍夫变换基本流程如下。
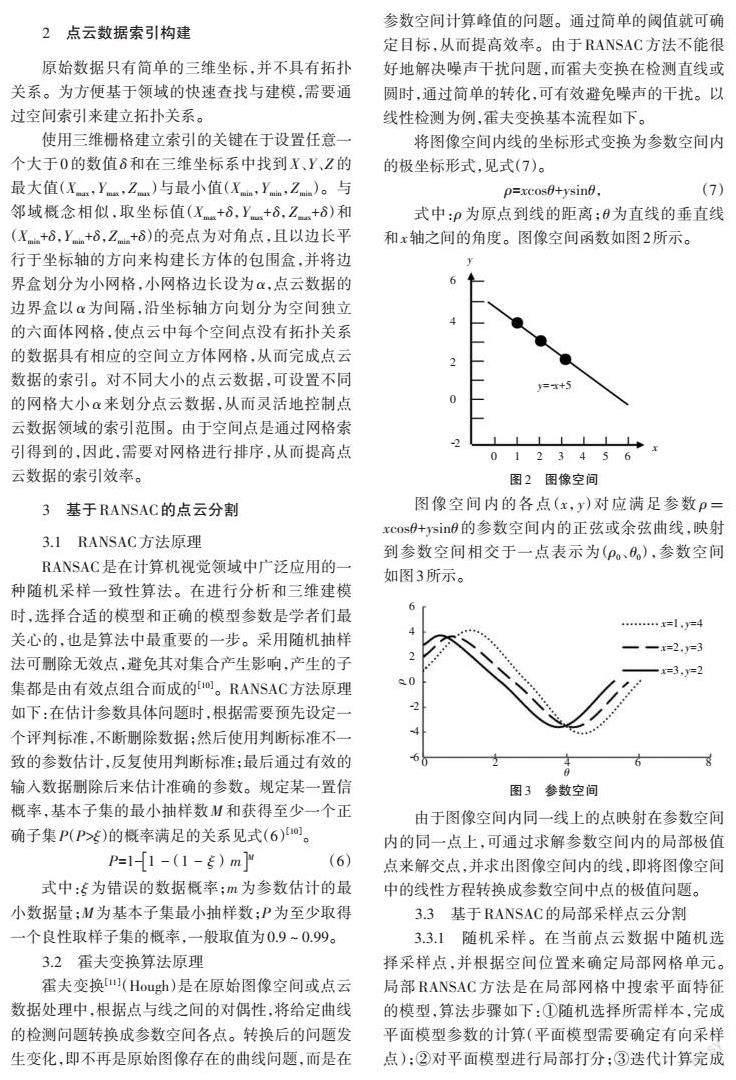
将图像空间内线的坐标形式变换为参数空间内的极坐标形式,见式(7)。
ρ=xcosθ+ysinθ, (7)
式中:ρ为原点到线的距离;θ为直线的垂直线和x轴之间的角度。图像空间函数如图2所示。
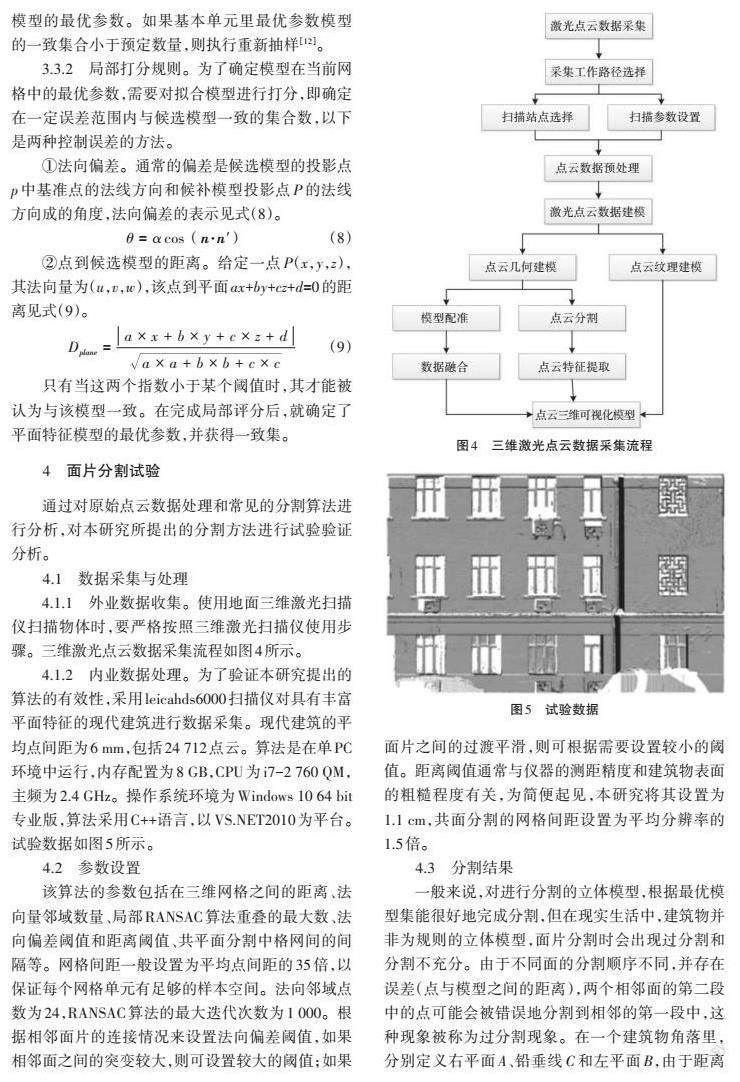
图像空间内的各点(x,y)对应满足参数ρ=xcosθ+ysinθ的参数空间内的正弦或余弦曲线,映射到参数空间相交于一点表示为(ρ0、θ0),参数空间如图3所示。
由于图像空间内同一线上的点映射在参数空间内的同一点上,可通过求解参数空间内的局部极值点来解交点,并求出图像空间内的线,即将图像空间中的线性方程转换成参数空间中点的极值问题。
3.3 基于RANSAC的局部采样点云分割
3.3.1 随机采样。在当前点云数据中随机选择采样点,并根据空间位置来确定局部网格单元。局部RANSAC方法是在局部网格中搜索平面特征的模型,算法步骤如下:①随机选择所需样本,完成平面模型参数的计算(平面模型需要确定有向采样点);②对平面模型进行局部打分;③迭代计算完成模型的最优参数。如果基本单元里最优参数模型的一致集合小于预定数量,则执行重新抽样[12]。
3.3.2 局部打分规则。为了确定模型在当前网格中的最优参数,需要对拟合模型进行打分,即确定在一定误差范围内与候选模型一致的集合数,以下是两种控制误差的方法。
①法向偏差。通常的偏差是候选模型的投影点p中基准点的法线方向和候补模型投影点P的法线方向成的角度,法向偏差的表示见式(8)。
[θ=αcos(n·n′)] (8)
②点到候选模型的距离。给定一点P(x,y,z),其法向量为(u,v,w),该点到平面ax+by+cz+d=0的距离见式(9)。
[Dplane=a×x+b×y+c×z+da×a+b×b+c×c] (9)
只有当这两个指数小于某个阈值时,其才能被认为与该模型一致。在完成局部评分后,就确定了平面特征模型的最优参数,并获得一致集。
4 面片分割试验
通过对原始点云数据处理和常见的分割算法进行分析,对本研究所提出的分割方法进行试验验证分析。
4.1 数据采集与处理
4.1.1 外业数据收集。使用地面三维激光扫描仪扫描物体时,要严格按照三维激光扫描仪使用步骤。三维激光点云数据采集流程如图4所示。
4.1.2 内业数据处理。为了验证本研究提出的算法的有效性,采用leicahds6000扫描仪对具有丰富平面特征的现代建筑进行数据采集。现代建筑的平均点间距为6 mm,包括24 712点云。算法是在单PC环境中运行,内存配置为8 GB,CPU为i7-2 760 QM,主频为2.4 GHz。操作系统环境为Windows 10 64 bit专业版,算法采用C++语言,以VS.NET2010为平台。试验数据如图5所示。
4.2 参数设置
该算法的参数包括在三维网格之间的距离、法向量邻域数量、局部RANSAC算法重叠的最大数、法向偏差阈值和距离阈值、共平面分割中格网间的间隔等。网格间距一般设置为平均点间距的35倍,以保证每个网格单元有足够的样本空间。法向邻域点数为24,RANSAC算法的最大迭代次数为1 000。根据相邻面片的连接情况来设置法向偏差阈值,如果相邻面之间的突变较大,则可设置较大的阈值;如果面片之间的过渡平滑,则可根据需要设置较小的阈值。距离阈值通常与仪器的测距精度和建筑物表面的粗糙程度有关,为简便起见,本研究将其设置为1.1 cm,共面分割的网格间距设置为平均分辨率的1.5倍。
4.3 分割结果
一般来说,对进行分割的立体模型,根据最优模型集能很好地完成分割,但在现实生活中,建筑物并非为规则的立体模型,面片分割时会出现过分割和分割不充分。由于不同面的分割顺序不同,并存在误差(点与模型之间的距离),两个相邻面的第二段中的点可能会被错误地分割到相邻的第一段中,这种现象被称为过分割现象。在一个建筑物角落里,分别定义右平面A、铅垂线C和左平面B,由于距离误差阈值的限制,面片A和面片B中与铅垂线C距离较近的点,会因为距离小于阈值而相互误分割。此外,相邻两面片在交界处一般存在法向突变,使用法向量的值与方向进行法向约束能很好解决这类问题。法向约束效果如图6所示。
同一参数不在同一平面(同参异面)时,即某一参数模型的一致集合具有不同的面片聚集区域,会出现分割不充分的现象。因此,对平面类需要将共识集投影到相应平面上,然后按照常规聚类方法对二维网格进行划分,并对空间进行划分,完成共面分割后,获得各独立的数据聚集区域。最终分割结果如图7所示。
5 结语
本研究使用一种根据地面三维激光扫描现代建筑物而形成点云数据的方法,通过数据检测、识别、由点到线再到面,从而实现对建筑物平面分割。该方法利用地面激光点云数据的高空间分辨率,将采样点视为目标对象的冗余表示。在此基础上,提出了一种基于局部采样的局部RANSAC模型检测方法,并通过统计推断策略对每个局部候选模型的全局得分进行估计,从而获得当前最优模型,有效避免了点云数据分割中的过度分割、分割不充分和同参异面的问题,从而实现对现代建筑物平面特征的识别与提取。
参考文献:
[1]刘钰.激光扫描技术在文物建模及虚拟修复中的应用研究[D].西安:长安大学,2012.
[2]耿霄雯.三维激光扫描技术在地形测绘中的应用探究[J].建材与装饰,2019(3):234-235.
[3]丁延辉,邱冬炜,王凤利,等.基于地面三维激光扫描数据的建筑物三维模型重建[J].测绘通报,2010(3):55-57.
[4]MIRCEAEMIL N,SILVIA C,CALIMANUTIONUT C,et al.Non-destructive measurements for 3D modeling and monitoring of large buildings using terrestrial laser scanning and unmanned aerial systems[J].Sensors,2023(12):5678.
[5]汪文琪,李宗春,付永健,等.基于改進多规则区域生长的点云多要素分割[J].光学学报,2021(5):198-212.
[6]王晓辉,吴禄慎,陈华伟,等.基于区域聚类分割的点云特征线提取[J].光学学报,2018(11):66-75.
[7]FAN T J,MEDIONI G,NEVATIA R.Segmented descriptions of 3-D surfaces[J].IEEE Journal on Robotics and Automation,1987(6):527-538.
[8]王力.三维扫描数据处理中数据结构的设计与比较[J].测绘通报,2010(9):63-65.
[9]SHAH T R.Automatic reconstruction of industrial installations using point clouds and images[D].Delft:Delft University of Technology,2006.
[10]陈付幸,王润生.基于预检验的快速随机抽样一致性算法[J].软件学报,2005(8):1431-1437.
[11]田朋举,花向红,康停军,等.一种基于点云数据的建筑物平面精细分割方法[J].测绘科学,2021,46(2):122-129.
[12]石宏斌,殷义程,袁曼飞.点云数据的多几何面片特征自动识别[J].测绘通报,2017(2):6-9,53.
