气压弹道式冲击波治疗手柄的控制设计
2024-04-12浦泽洋熊根良张晓庆
浦泽洋, 熊根良, 尹 鹏, 张晓庆, 禹 超
(1.上海工程技术大学 机械与汽车工程学院, 上海 201620;2.上海钧控机器人有限公司, 上海 201112)
引言
比例电磁阀是控制气压弹道式冲击波治疗手柄气路通断的主要执行部件之一,手柄工作时气路通断比较快,比例阀快速开启和闭合不仅影响着压缩空气通过的量,同时影响冲击波手柄内子弹体往复运动的稳定性。官伯然等[1]设计并优化了高功率电磁冲击波发生器,提高电声转换效率,实现电磁冲击波高效高功率输出。马红霞等[2]设计了一款基于STC89C51单片机的气压弹道式冲击波治疗仪控制系统,采用单片机控制继电器的方式驱动电磁阀通断。本研究设计了一款气路控制系统,采用STM32F103VE单片机作为系统的主控单元,从硬件电路组成和软件系统实现进行论述,并对比例阀进行建模仿真,研究不同占空比对气压的影响,确保冲击波手柄工作状态的稳定。
1 气压弹道式冲击波治疗原理与设计方案
1.1 气压弹道式冲击波治疗原理
体外冲击波疗法已成功用于软组织病理学,如外侧上髁炎、足底筋膜炎、肩部腱病。可改善肌腱结构,增加疼痛阈值[3]。冲击波在人体组织传播过程中在不同声阻抗的材料界面之间,形成反射和折射后会在界面产生应力的作用,并在材料内部形成能量衰减,形成如空化效应、机械效应、镇痛效应、代谢激活效应,各个效应在组织细胞间产生不同的效果,以达到治疗目的。
体外冲击波对生物组织产生相关影响,导致皮肤改善和皮下组织的重组,在临床上可用于改善橘皮组织和局部脂肪堆积问题[4]。冲击波手柄及其治疗原理如图1所示。
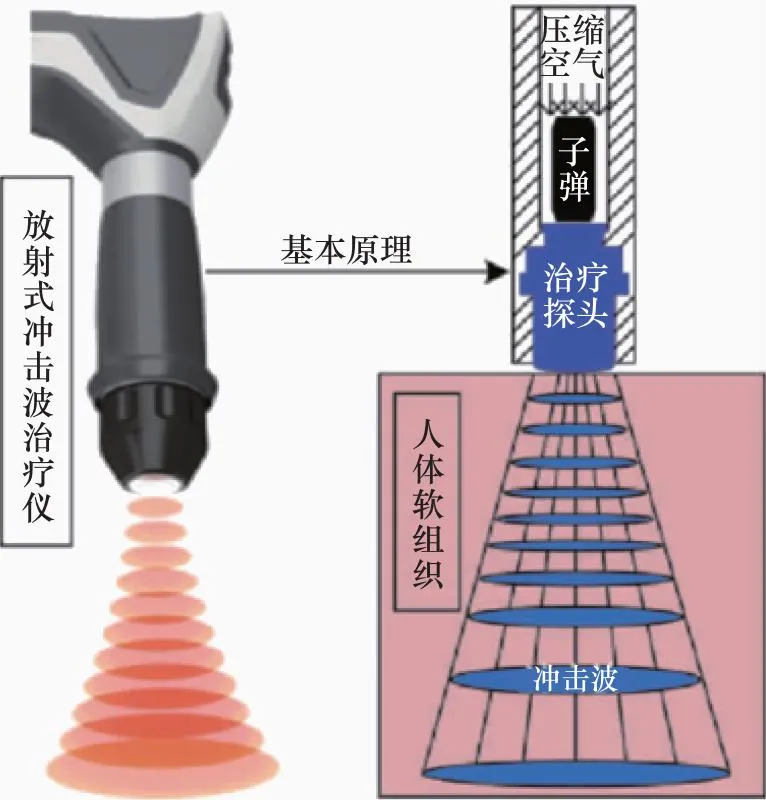
图1 冲击波治疗原理图
1.2 系统整体方案
本研究提出的气压弹道式冲击波治疗仪控制系统硬件方面主要由控制电路和气动执行装置组成。控制系统主要是以STM32F103VE为主机芯片,控制气动执行装置的工作。气动执行装置由单片机控制产生相应的动作,实现气路的通断。由冲击波手柄内部子弹体撞击前端传导子产生的发散式冲击波直接作用于患者。系统功能框图如图2所示。系统硬件实物图如图3所示。

图2 冲击波手柄系统功能框图

图3 系统硬件实物图
2 系统硬件设计
如图3所示,设计的手柄驱动装置主要包括STM32F103VE主控制器、功率转换电路、比例电磁阀和电源电路等。主控制器STM32F103VE输出PWM信号,经过隔离电路后,驱动功率转换电路中H桥的相应开关管。比例电磁阀电源经开关管变换后,成为脉冲电源,驱动比例电磁阀工作,其流量由脉冲电源等效电流决定。
2.1 主控制器
STM32F103VE微控制器采用了基于ARM Cortex-M3内核的32位RISC处理器,最高主频为72 MHz,拥有512 kB的闪存程序存储器和64 kB的SRAM。驱动一个比例电磁阀需要两路PWM信号,分别用于比例阀的开度和控制比例阀的反馈。其中开度控制信号通过改变PWM的占空比实现,反馈信号则需要读取比例阀的位置传感器或其他反馈装置信号,将其转化为PWM信号输出。
2.2 光耦隔离电路
系统采用光耦隔离电路,将主控制器与电磁阀充分隔离,防止功率电路产生的能量涌入主控制器。STM32F103VE芯片输出的PWM信号经光耦合器后转换为隔离后的PWM信号,然后经过功率转换电路。光耦隔离电路如图4所示。采用了HCPL2631芯片,该芯片延迟时间为纳秒级,满足隔离电路延迟要求。
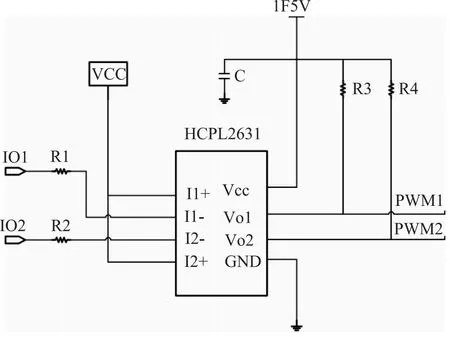
图4 光耦隔离电路
2.3 驱动电路
基于L298N芯片的驱动模块不仅可以调节电流方向,还可以通过调制控制板输出的PWM信号波来加速[5]。使用双路全桥芯片L298N的H桥式功率电路,可用于驱动电机或电磁阀等感性负载,最高输出电压可以达到35 V,最大持续电流可达2 A,额定功率为25 W。控制L298 N只需要使用标准TTL逻辑电平信号,单片机IO口控制L298 N的输入信号可以调整比例阀输出电流方向。将L298 N的两个使能控制端外接PWM信号,可以控制L298 N的开关状态,相当于将比例阀电源进行脉宽调制,以控制比例阀输出电流的大小。
H桥功率电路驱动比例阀等效电路如图5所示。当比例阀驱动电流为正时,关闭MOS管Q2和Q3,输入PWM控制信号到MOS管Q1和Q4。当PWM信号为高电平时,Q1和Q4同时导通,比例阀电流从1至2方向流动;当PWM信号为低电平时,Q1和Q4同时关断,比例阀电流从1至2方向续流通过VD3和VD2。同理,比例阀驱动电流为负时,PWM控制信号从Q2,Q3 输入。PWM为高电平时,比例阀电流从2至1方向流经Q2和Q3,低电平时,Q2,Q3同时关闭,比例阀电流从2至1方向流经VD4和VD1。
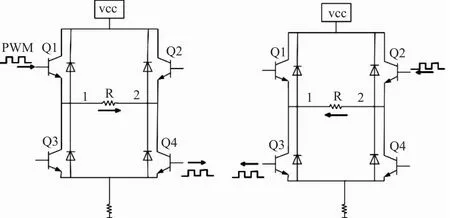
图5 H桥功率电路驱动比例阀等效电路图
L298N内部有两个电流放大器,可以将输入的控制信号放大到足够的电压和电流,以驱动比例阀。通过调节主控制器输出PWM信号的脉冲宽度和占空比,控制比例阀的工作频率及开闭状态。同时L298N内部的电流保护元件可以有效避免电路损坏。图6为基于L298N的功率转换电路。
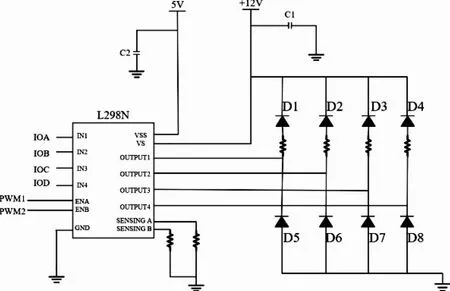
图6 功率转换电路
2.4 比例电磁阀
比例电磁阀驱动的核心是控制比例阀线圈中的电流。该电路采用基于PWM控制的开关型功率输出电路,具有功耗小、响应快、抗干扰能力强等优点。通过H桥驱动电路与PWM控制方式结合,可以有效解决比例阀快开、快闭、线圈续流的影响。
直动型二通比例电磁阀采用直流24 V供电方式,线圈工作电流为0~200 mA。结构如图7所示。具体工作原理如下:初始状态时,可动铁芯在弹簧压力下堵住进气口,此时无法进气;当线圈得电时,可动铁芯克服弹簧弹力,在电磁力的作用下向左运动,此时空气进入到腔室内并通过阀体到达出气口。
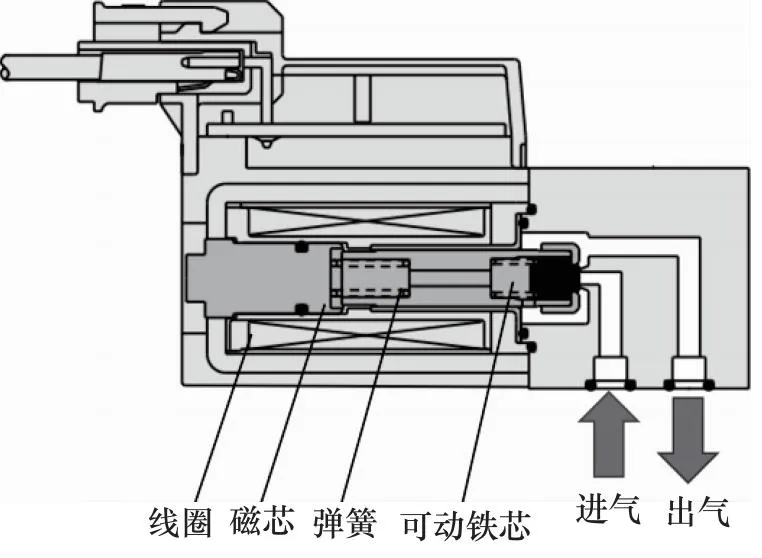
图7 直动型二通比例电磁阀结构示意图
对于该比例电磁阀来说,所使用的压力差越小,可控制的气体流量范围及电流范围越小,控制性越差。由此可能会产生振荡或者阀芯无法打开的现象。所以在一个脉宽控制周期T中, 工作时间tP与其比值即占空比D对阀芯位移及气体流量特性的影响,关系着冲击波手柄工作状态及治疗效果。
在比例阀线圈通电后,阀芯受到的轴向电磁力为:
(1)
式中,φ—— 工作气隙磁通量
μ0—— 真空磁导率
S—— 磁芯有效面积
B—— 工作气隙磁感应强度
如不考虑漏磁及其他连接部位存在的气隙,认为主气隙即为阀芯行程,此时电磁铁气隙磁感应强度为[6-9]:
(2)
式中,N—— 线圈匝数
I—— 电流强度
δ—— 气隙长度
将式(2)代入式(1)中可得:
(3)
阀芯在运动过程中,受到弹簧弹力、电磁力及气体压力的共同作用。在闭合状态下其平衡方程为:
k·Δx=Fm+Δp·S
(4)
式中,k—— 弹簧弹性系数
Δx—— 弹簧压缩形变量
Δp—— 工作气压差
在线圈电流达到一定强度后,阀芯开始位移,此时阀芯动态平衡方程为:
(5)
根据线圈电流强度,结合阀芯动态平衡方程可以得到比例阀工作状态,保证压缩空气通过,以驱动内部子弹体撞击前端传导子产生所需冲击波。
3 控制系统软件设计
3.1 系统工作主流程
系统主要工作流程如图8所示。系统启动后初始化引脚、定时器、外设等配置,设置初始工作频率,按下启动键,此时系统开始运行。在工作过程中可随时调节工作频率,直至触发定时器中断并关闭系统。
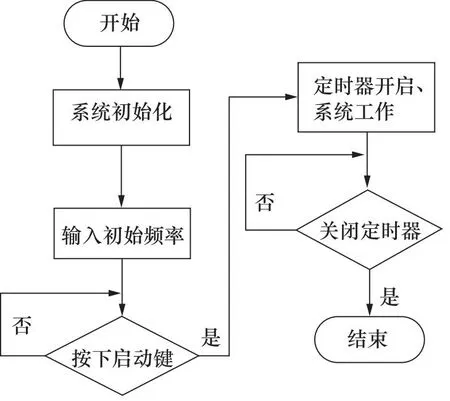
图8 系统软件流程图
3.2 调频算法及程序流程
气动手柄启动后比例阀按照初始频率10 Hz开始工作,同时芯片会不断扫描与Key1和Key2按键相连的GPIO引脚是否有下拉信号产生。若未检测到下拉信号,则继续保持扫描GPIO引脚口;若检测到按键Key1按下,此时判断频率是否小于21 Hz,若小于,则频率增加1 Hz,若等于21 Hz,则频率不再增加,保持在21 Hz工作;同理,检测到按键Key2按下,判断频率是否大于1 Hz,若大于,则频率减少1 Hz,若等于1 Hz,则频率不再减少,保持在1 Hz工作。具体程序流程图如图9所示。
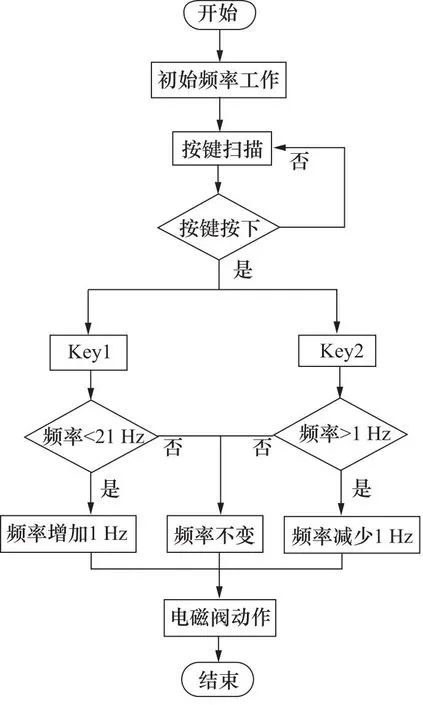
图9 按键调频程序流程图
4 仿真分析
4.1 比例电磁阀动态模型
PWM信号为高电平时,电源驱动比例阀工作,此时线圈两端电压为感应电动势与线圈电阻产生电压之和:
(6)
式中,RL—— 线圈电阻
Rs—— 电源内阻
PWM信号为低电平时,驱动电源与续流二极管相接,此时线圈两端电压方程为:
(7)
式中,RD为驱动电路H桥续流二极管等效电阻。
根据上述两种电压方程状态,建立该比例阀等效磁路模型:
IN=H1l1+2(H2l2+H3l3+φRm)+H0(δ0-xv)
(8)
式中,H1—— 磁轭轴向磁场强度
l1—— 磁轭轴向长度
H2—— 磁轭径向磁场强度
l2—— 径向等效长度
H3—— 衔铁和极靴磁场长度
l3—— 固定铁芯和极靴长度
Rm—— 漏磁元件等效磁阻
H0—— 工作气隙中的磁场强度
δ0—— 工作气隙长度
xv—— 阀芯位移量
根据上述等效磁路模型,在AMESim中选取合适的电磁元件并设置参数,构建比例电磁阀模型, 如图10所示[10-12]。
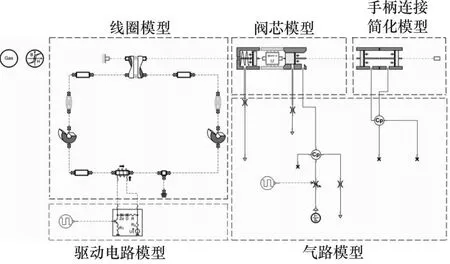
图10 比例阀AMESim模型
由于气体流量控制与阀芯位移直接相关[13-14],因此该模型主要用于分析PWM信号与线圈电流、阀芯位移及腔室气压之间的关系,从而得到冲击波手柄稳定工作的条件范围。
4.2 线圈电流特性研究
如图11所示为比例阀在24 V驱动电压、0.5 MPa气源压力、10 Hz工作频率、50%占空比工作情况下线圈电流的变化。由图可以看出,线圈通电后电流值在1 ms内迅速增加,此时阀芯所受的电磁力小于弹簧弹力,因此阀芯位移为0。当电流值增大到一定程度时,阀芯所受电磁力克服弹簧弹力开始运动, 产生的反电动势使得线圈中电流下降,直到阀芯吸合,此过程持续约0.5 ms,即为阀芯运动过程。随后电流又继续迅速增加至稳态值60 mA。待PWM控制信号高电平结束后,驱动电压降为0 V,此时线圈电流在0.01 s内降为0 mA。

图11 线圈电流变化曲线
图12对比了不同工作气压下,阀芯运动过程中线圈电流的变化。由图12可知,当工作气压为0.2 MPa,阀芯开始运动时线圈电流值为50 mA;当工作气压为0.5 MPa,阀芯开始运动时线圈电流值为40 mA;当工作气压达到最高1.0 MPa,阀芯开始运动时线圈电流值为36 mA。根据以上趋势,结合阀芯运动平衡方程可知,比例阀在工作气压范围内,气压越高,进出气口气压差越大,则阀芯所受的压力越大,启动时克服弹簧弹力所需的电磁力也就越小,因此启动电流值越低。
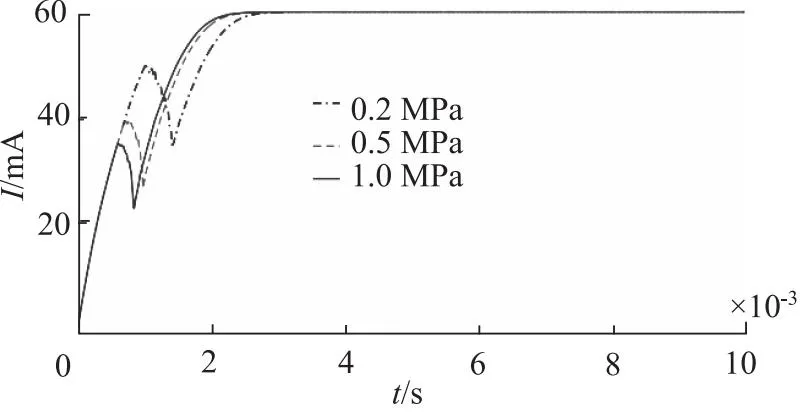
图12 不同工作气压下阀芯吸合过程线圈电流变化
4.3 占空比对阀芯位移特性研究
PWM产生的控制信号经模拟功率放大电路后驱动比例阀工作。驱动电压为24 V,工作气压0.5 MPa,电磁气隙设置为1 mm,线圈匝数500, 结果采样频率10000 Hz。设置了PWM频率为10 Hz时,占空比分别为20%,50%和80%时对电流和阀芯位移的影响。选取连续3个稳定工作周期,关系曲线如图13所示。

图13 不同占空比阀芯位移变化曲线
由图13可知,占空比越高,一个周期内阀芯保持开启状态的时间越长,闭合时间越短。在tp0之前有极为短暂的阀芯克服弹簧弹力的过程,待电流上升达到阀芯启动阈值后克服阻力开始运动,在tp0时间内位移至行程最大值。当电流到达稳态值后,即tp1时间内,阀芯保持稳定吸合状态。当电流开始下降,阀芯所受电磁力小于弹簧弹力时,开始闭合,此时电流继续下降,阀芯在tp2时间内完成闭合过程。tp3时间段为阀芯完全闭合状态,此时气体无法通过比例阀,直至下一工作周期开启。
4.4 比例阀腔室气压影响因素研究
占空比是确保比例阀控制流量精准的重要指标,较宽的可控范围可以确保冲击波手柄工作的强度和稳定性。设置比例阀工作频率为10 Hz,工作压力0.5 MPa,选取3个连续的工作周期,以每个周期内腔室气压进行完整的变化为判断依据,得到占空比和腔室气压变化关系曲线如图14所示。

图14 不同占空比腔室气压变化曲线
从图14可以看出,占空比为23%时,阀芯从开启运动至稳定吸合状态过程中,腔室内气压迅速升高,随后压缩空气驱动冲击波手柄工作,此时气压变化放缓,在气压值刚好达到0.5 MPa时,阀芯闭合,腔室气压又迅速降至外界标准气压值,完成一个周期变化。若占空比低于23%,工作气压最高则无法达到0.5 MPa。增加占空比至91%时, 可以看出在阀芯闭合后, 腔室内气压未完全降至外界标准大气压,此时阀芯再次开启,进入下一运动周期,气压又迅速升高。由于比例阀与冲击波手柄直接相连,腔室内气压不能降至外界标准气压值,则手柄内子弹体无法完全回复,影响下一次运动行程,从而影响手柄正常工作。若占空比为90%,工作气压最低刚好可降至外界标准大气压值。
分别设置不同工作气压,得到控制信号有效占空比范围,如图15所示。随着工作气压的增大,有效占空比范围也随之增大,比例阀流量控制越精准。因此可针对不同工作气压,设置相应的控制信号占空比,从而达到优化手柄治疗的效果。
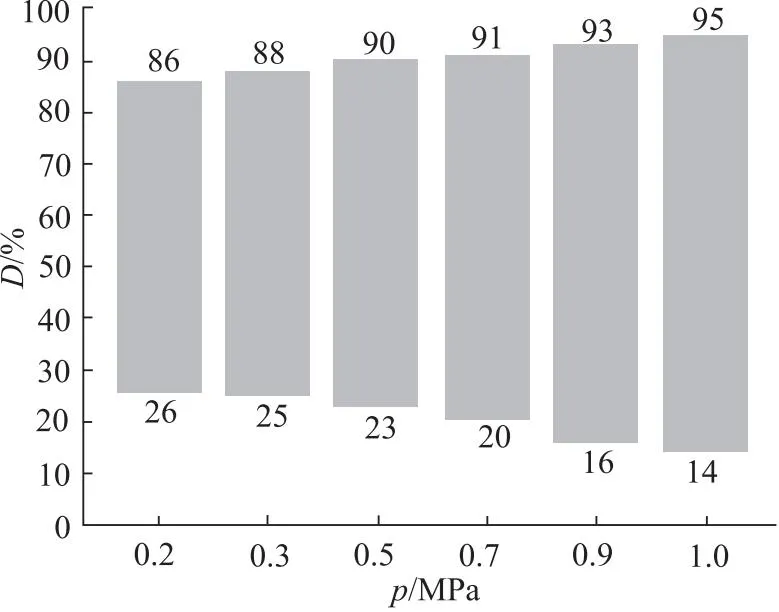
图15 不同工作气压有效占空比
通过建模与仿真分析,确定了比例阀在不同工作气压下PWM控制信号的有效占空比范围,在此占空比区间内能够保证冲击波手柄治疗强度、稳定性以及治疗效果。
5 结论
本研究设计了一种基于STM32的气压弹道式冲击波手柄控制系统,采用基于L298N的功率转换电路驱动比例阀,通过PWM脉宽调制来控制比例电磁阀的通断从而控制冲击波手柄工作频率和状态。建立了比例阀电磁模型,输入相关计算参数,使用AMESim软件仿真分析得到如下结论:
(1) 比例阀启动电流与工作气压相关,气压越大,启动电流越低,气压越小,启动电流越大;
(2) PWM信号占空比越大,阀芯开启时间越长,气体流量也越大;
(3) 确定了不同工作气压下PWM有效占空比范围,得到冲击波手柄稳定工作条件,从而保证手柄工作的强度和稳定性,可以为后续冲击波手柄优化提供理论指导。
