人工智能在土木工程领域的应用研究现状及展望
2024-04-11刘红波张帆陈志华1b王龙轩
刘红波 ,张帆 ,陈志华,1b ,王龙轩
(1.天津大学 a.建筑工程学院;b.滨海土木工程结构与安全教育部重点实验室,天津 300072;2.河北工程大学 土木工程学院,河北 邯郸 056000)
人工智能(Artificial Intelligent,AI)是一门利用计算机模拟、延伸及扩展人的理论、方法及技术的综合性学科[1],被认为是二十一世纪三大尖端技术之一,涵盖了计算机科学、符号逻辑学、仿生学、信息论、控制论等众多领域,属自然科学、社会科学、技术科学三向交叉学科[2-3]。
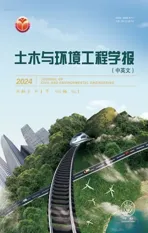
自1956 年美国达特矛斯会议(Dartmouth Conference)上提出“人工智能”的概念以来,其主要经历了3 个发展阶段,分别是1956—1980 年的人工智能起步阶段,1980—1990 年的专家系统盛行阶段,2000 年至今的深度学习阶段[4],如图1 所示。目前,人工智能已成为各领域的研究及应用热点,中国是世界上在人工智能领域内行动最早、动作最快的国家之一,自2015 年起,先后颁布了《中国制造2025》《积极推进“互联网+”行动的指导意见》《“十三五”国家战略性新兴产业发展规划》《新一代人工智能发展规划》等政策,从各个方面详细规划了人工智能的重点发展方向,并明确指出人工智能是新一轮科技革命和产业变革的核心技术[5]。
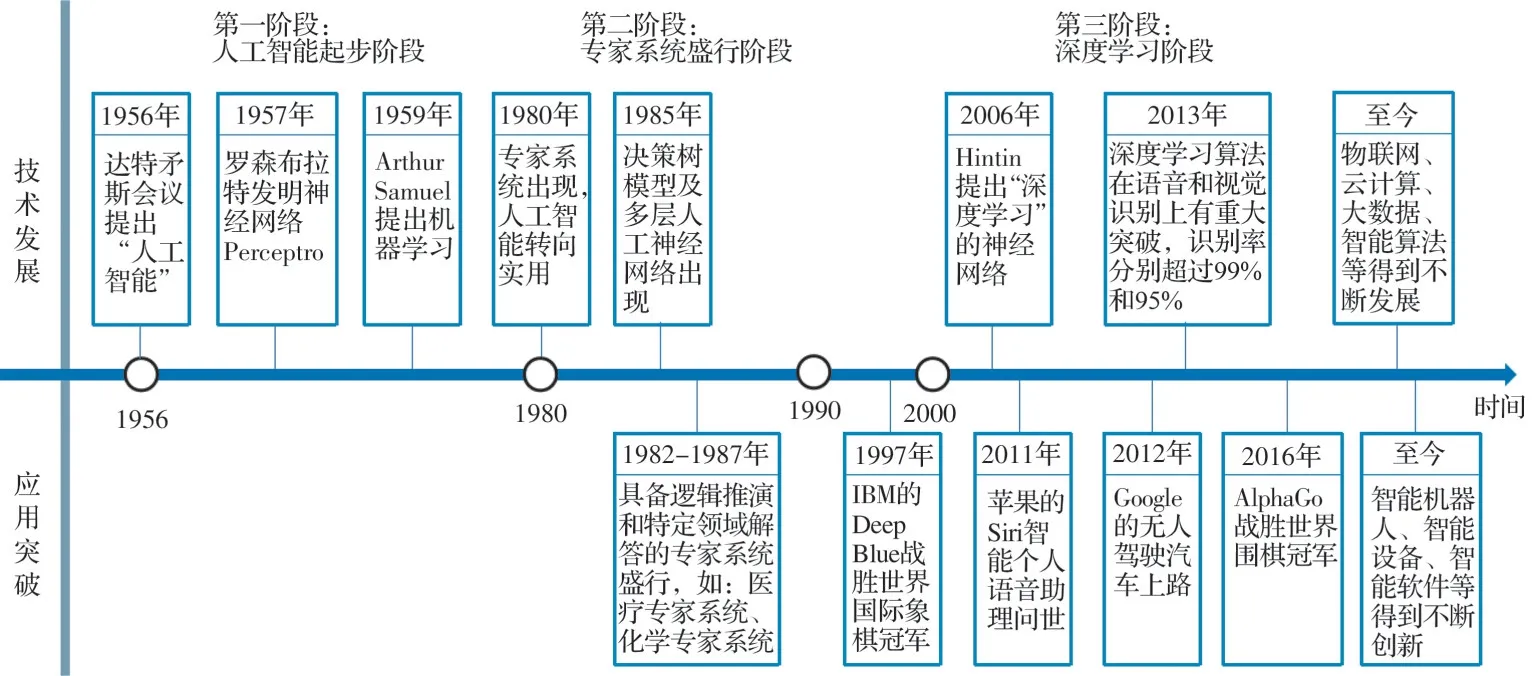
图1 人工智能发展历程Fig.1 Artificial intelligence development history
建筑业是中国国民经济的重要支柱产业,随着土木工程建设项目的不断增多,中国基础设施逐步完善,城镇化水平稳步提升。然而,在建筑业高速发展的同时,行业信息化水平较低、生产方式粗放、劳动生产率不高、资源消耗量大、科技创新能力不足等一系列问题愈发突出[6]。为实现土木工程行业的高质量发展,将人工智能技术应用于土木工程设计、建造、养维护的全生命周期中,深刻变革土木工程发展,全面提升土木工程行业的数字化、自动化、信息化和智能化。
目前,人工智能技术为建筑设计、生产建造及养维护等阶段提供了新方法,在一定程度上实现了土木工程建设项目的智能化[7-8]。但人工智能技术在土木工程领域的应用还未能全面普及,随着物联网、云计算、大数据等相关科技产业的迅猛发展,将为实现智慧、绿色、可持续的土木工程建设项目带来更多机遇和挑战。
笔者定性分析了自然语言处理、计算机视觉、语音识别及交叉领域的研究现状;定量分析了建筑设计、生产建造及养维护的智能化发展;利用CiteSpace 可视化工具深入挖掘人工智能在土木工程中存在的问题、发展瓶颈和研究趋势,并给出相应的解决办法及研究思路,为人工智能在土木工程领域的后续研究与发展提供参考。
1 人工智能的基础研究领域
人工智能可分为自然语言处理、计算机视觉、语音识别和交叉领域4 个基础研究领域[9]。
1.1 自然语言处理
自然语言处理(Natural Language Processing,NLP)是以计算机为媒介对人类特有的自然语言进行加工处理,使计算机能够像人一样“处理”和“理解”自然语言[10]。在土木工程领域,NLP 从基础性的语义相似度、依存句法分析到应用性的人机互动、报告分析等均展现了巨大的应用前景,利用NLP 可将无结构化的风险信息、施工图纸信息、施工组织方案信息转化为结构化信息,从而对土木工程建设项目的日常文档进行隐性知识(如危险对象、危险位置、事故原因、事故类型等)挖掘[11-12]。
Tixier 等[13]证明了使用NLP 可消除由人工信息分析产生的报告误差,利用NLP 系统能自动扫描并快速分析大量非结构化报告,准确率超过95%,利用NLP 系统还可从非结构化信息报告数据库中获取大量可靠的结构化数据集,从而提取新的安全信息,改善项目安全管理。王飞等[14]梳理了深度学习驱动下自然语言处理的发展,认为深度学习推动了自然语言处理的进步,自然语言处理的进步也为深度学习提供了更为广阔的应用前景。Kim 等[15]提出了基于NLP 的建筑事故案例知识管理系统,如图2所示,在该系统中,利用信息检索模型可查询与用户意图相关度达97%以上的事故案例,利用信息抽取模型可自动分析事故案例中的隐性知识,达到高效风险管理的目的。李舟军等[16]介绍了NLP 中静态及动态预训练技术,梳理了包括BERT 和XLNet在内的新型预训练方法,并给出了未来的发展方向。
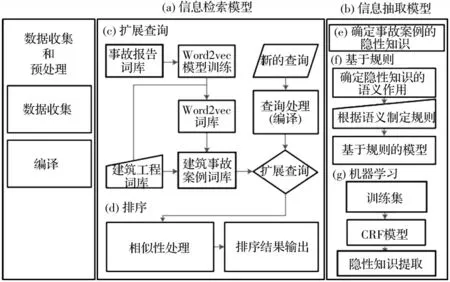
图2 建筑事故案例知识管理系统[15]Fig.2 Knowledge management system for construction accident cases
综合当前研究现状来看,NLP 的研究深度和应用范围仍较低,首先表现为建筑领域词库通用性差导致的文件预处理质量不高,这将对NLP 过程中的文本数据分词、词性标注等程序产生不利影响;然后是信息提取规则的制定有限,即在土木工程领域中难以获得所有的项目数据(如项目合同书等),导致难以开发用于信息提取的所有可能的规则;此外,NLP 的深度学习训练模型与地方性语言有关,同一模型无法处理不同语言的文本信息,因此无法进行有效的迁移学习;最后,当前NLP 多用于施工建造阶段,而在设计、养维护等阶段的应用较少,导致土木工程全生命周期文件管理的效率及质量较低。
1.2 计算机视觉
计算机视觉(Computer Vision)是以成像系统代替视觉器官作为输入传感手段,以智能算法代替人类大脑作为处理分析枢纽,从图像、视频中提取符号数字信息进行目标的识别、检测及跟踪,最终使计算机能够像人一样通过视觉来“观察”和“理解”世界[17]。计算机视觉在土木工程领域的混凝土裂缝检测、结构损伤识别、施工现场安全监控等方面得到了大量研究,具有十分广阔的应用前景[18]。
Zaurin 等[19]提出了利用计算机视觉进行桥梁结构的健康监测,将图像、视频结合计算机视觉技术来检测、分类和跟踪不同车辆,并利用传感数据确定桥梁结构的标准化响应。Seo 等[20]总结了基于计算机视觉的施工现场安全与健康监测方法,将以往的计算机视觉研究分为目标监测、目标跟踪及动作识别3 类,并提出基于计算机视觉的安全与健康监测通用框架,如图3 所示。韩晓健等[21]采用计算机视觉技术进行混凝土表面裂缝检测研究,建立了能从图像中自动定位裂缝并获得裂缝宽度的深度卷积神经网络裂缝识别模型,识别准确率超过98%,如图4 所示。Zhou 等[22]提出了基于计算机视觉技术和深度学习算法的车辆载荷非接触式自动辨识方法,建立了8 624 幅车辆图像数据集并进行深度卷积神经网络(Deep Convolutional Neural Network,DCNN)训练,最后将迁移学习与ImageNet 提取的通用特征相结合,在强化学习策略下的辨识度最高可达98.17%。宋燕飞等[23]利用双目立体视觉技术及图像识别技术提出了空间网架结构的三维模型重建方法,并通过网架模型的实测试验来验证该方法的可行性。
图3 基于计算机视觉的安全与健康监测通用框架[20]Fig.3 General framework for computer vision-based safety and health monitoring
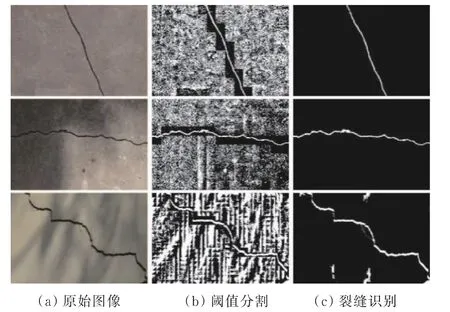
图4 基于计算机视觉技术的混凝土表面裂缝检测[21]Fig.4 Surface crack detection of concrete based on computer vision technology
随着并行计算、云计算、大数据、深度学习等软硬件技术的发展,计算机视觉技术得到不断提升,但现阶段仍存在许多技术挑战及应用难题。例如,计算机视觉在结构健康监测方面的研究仍处于起步阶段,如何减小由硬件因素、算法因素、环境因素等产生的误差是未来的重要研究方向,如何提高计算机视觉的应用效率和可靠性是后续的研究重点。此外,计算机视觉在检测施工人员是否佩戴安全帽上取得了较好效果,但后期应用中如何触发报警系统及人机耦合等方面有待进一步研究。
1.3 语音识别
语音识别(Speech Recognition)是指计算机将输入的语音信号进行识别理解后转换为文本输出的过程,使计算机能够像人一样具备“听觉”功能[24]。
在建筑环境中,语音识别可用于车库开关、语音密码锁,在家居环境中,语音识别可用于家电遥感,此外,语音识别还可用于关键词检索、号码语音查询等[25]。在未来的应用研究中,语音识别可为建筑智能安装提供帮助,如建筑路线语音导航、机器人人机交互等,还可为灾后生命体的有效识别提供协助。
在土木工程领域,目前语音识别的相关研究及应用较少,研究难点主要集中在噪声处理、鲁棒性和语音模型上。首先,在输入语音信号时,经常会出现各种不同的噪声,提高对噪声的处理是改善语音信号识别准确率的重要一环。其次,现有的语音信号识别系统对环境的依赖性普遍偏高,不同的环境会导致语音信号的识别准确率有较大差异,增强语音识别系统的鲁棒性有助于实现系统的实际应用。最后,在语音交互时,语义、语速及情绪均会影响语音的真实含义,因此,语音模型的优化也是研究的重难点。
1.4 交叉领域
交叉领域(Interdisciplinary Fields)是指众多跨学科性的学科群体,体现了科学研究向综合性发展的趋势,具有较高的复杂性、广泛性和多样性[26]。人工智能与土木工程的学科交叉可极大地提高基础建设项目的工程质量和工作效率,十分契合中国对土木工程行业高质量发展模式的要求,是传统土木工程行业转型升级的发展趋势[27]。
唐和生等[28]建立了基于人工神经网络的矩形混凝土柱屈服强度预测模型,解析了影响混凝土柱屈服性能的关键因素,并利用Garson 敏感性分析证明了该模型的合理性。丁杨等[29]以大体积混凝土浇筑过程为例,建立了混凝土水化放热内部温度预测模型,为后续养维护的监测、预测、预警提供依据。赵平等[30]为提高古建筑修缮阶段的火灾监测水平,提出一种基于YOLO-BP 神经网络的火灾监测方法,如图5 所示,利用该方法监测古建筑修缮阶段火灾的准确率达93.9%。赵艳男等[31]提出了一种基于BP 神经网络的树状结构智能找形方法,利用该方法可对下层分级节点进行智能定位,从而实现树状结构的整体几何形态智能找形。
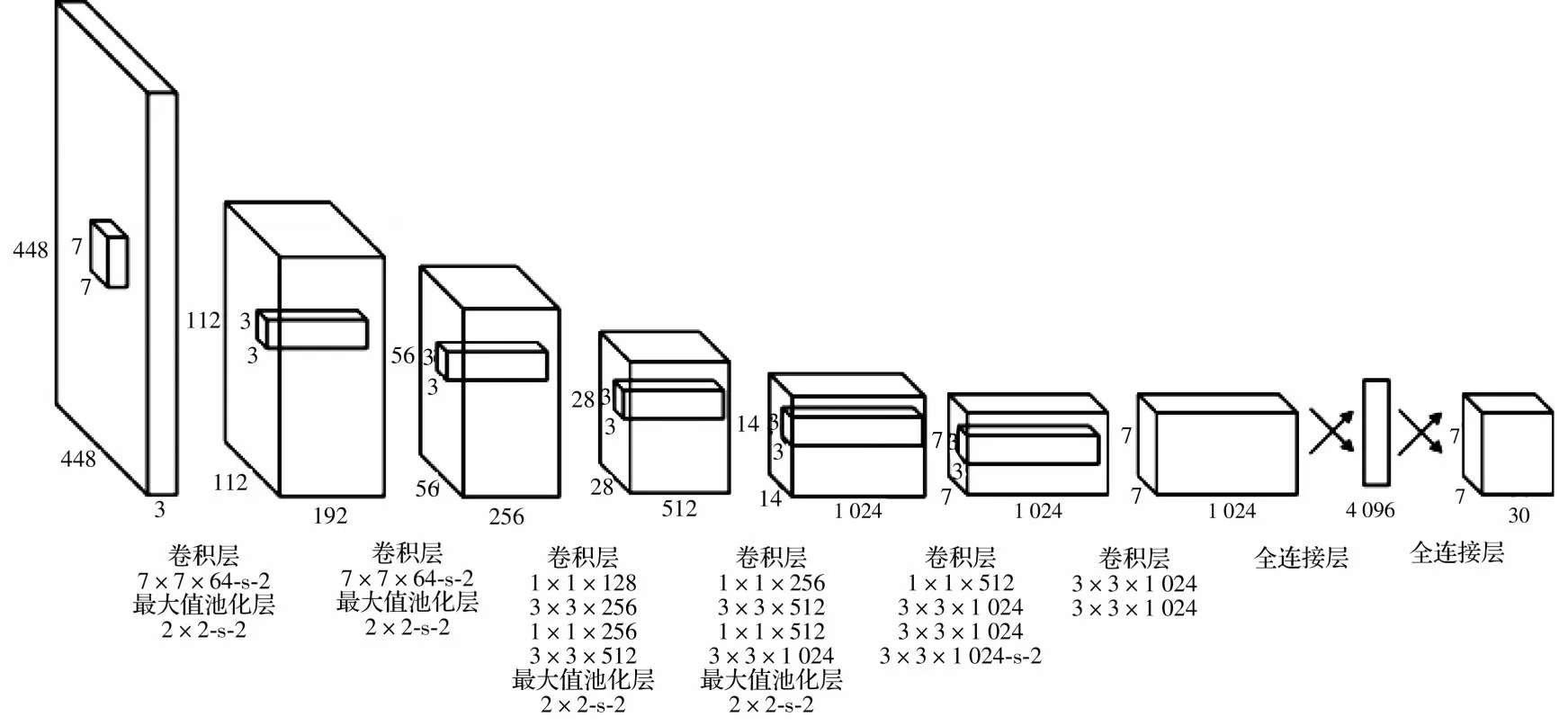
图5 YOLO 算法[30]Fig.5 YOLO algorithm
随着工业化、信息化和智能化的深度融合,传统土木工程行业面临深刻变革。全面开展智能设计、智能建造、智能养维护的技术研发与实践,加强人工智能与土木工程的学科交叉体系建设,是促进土木工程全生命周期智能化发展的关键所在。此外,在人工智能与土木工程的交叉学科体系构建中,应坚持以土木工程为主体,以人工智能为辅助,用人工智能技术来支持和促进土木工程全生命周期的智能化发展。
2 人工智能在土木工程中的研究现状
人工智能在土木工程领域的交叉研究主要体现在智能设计、智能建造和智能养维护3 个方面。
2.1 智能设计
2.1.1 城市规划设计
城市规划是指对城市发展进行规范、对城市布局进行研究、对城市建设进行部署,合理的城市规划是确保城市有序发展的前提[32]。将人工智能技术应用到城市规划中被视为该领域的标志性变革,使用人工智能技术分析处理影响城市规划的环境地质条件、人与交通行为等客观因素,进行人工智能模式下的规划设计,规避可能出现的规划错误,从而实现智能规划[33]。
吴志强[34]结合实际规划项目构建了城市智能模型,用人工智能辅助城市规划,进行精准布局,并阐述了“流”与“形”交互迭代的城市规划新思想。甘惟[35]探索了长三角城市群落的智能模型,推演了各城市在区域基础设施、生态资源、土地利用及产业分工等领域竞争合作关系下的发展路径,如图6 所示。林博等[36]建立了城市规划案例数据库,利用机器学习和深度学习进行城市布局的智能规划,并以温州中央绿轴为例验证了该方法的可行性。
2.1.2 专家系统
专家系统(Expert System)主要应用于早期的人工智能结构设计中,属智能计算机程序系统,该系统包含了土木工程领域专家水平的知识与经验,以人工智能来模拟专家的决策过程,从而解决领域内需要专家决定的复杂问题[37-38]。
朱浮声等[39]进行了基坑支挡结构专家系统的研发,利用该系统可帮助岩土工程师进行基坑支挡结构设计方案的选择,还可提供更加合理的基坑支挡结构设计。徐宇鸣[40]利用人工智能技术,研发了基于逻辑和规则的能对多层钢结构住宅进行结构设计的专家系统,并利用人工神经网络编制了结构选型程序,对工程设计有一定指导意义。
2.1.3 拓扑优化
拓扑优化(Topology Optimization)是一种在给定荷载约束条件下寻求材料在设计区域内的最佳分布形式、获得相应结构轻量化或某些性能最优的设计方法[41]。但对于大规模拓扑优化的求解,完成结构优化需要进行数百次甚至上千次的迭代计算,难以满足高效优质的设计需求。近年来,越来越多的专家学者将机器学习、神经网络、深度学习与拓扑优化框架结合,以提高拓扑优化的计算效率,实现实时拓扑优化[42]。
机器学习与拓扑优化。Lei 等[43]采用可移动变形组件法将拓扑优化数值计算框架与机器学习相结合,利用机器学习给出初步拓扑构型预测,将预测结果作为迭代优化的初始布局进行后续优化,从而获得最终的拓扑构型,如图7 所示。Jiang 等[44]研究了基于机器学习的可移动变形组件拓扑参数优化策略,将极端随机树ET(Extra-Trees)图像分类器集成到优化框架中,并与粒子群算法(Particle Swarm Optimization,PSO)相结合,形成闭环,从而使优化过程无需人工参数调整即可得到设计区域内的最优解,如图8 所示。Qiu 等[45]提出了一种用于点阵结构的基于K-mean 聚类的并发拓扑优化,该方法将宏观优化区域分为若干子区域,以减少所需优化的微观结构数量。

图7 基于机器学习的拓扑优化[43].Fig.7 Topology optimization based on machine learning
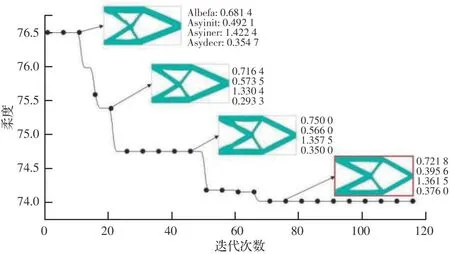
图8 基于粒子群算法的拓扑过程[44]Fig.8 The topological process based on PSO
神经网络与拓扑优化。Ulu 等[46]将主成分分析与神经网络相结合进行结构拓扑优化研究,以一组最优拓扑构型为初始数据,进行主成分分析并将其投影到低维空间,再利用神经网络进行拓扑构型训练,从而实现拓扑结构的预测功能,如图9 所示。White 等[47]提出了一种基于神经网络代理模型的多尺度拓扑优化,使用高分辨率微尺度代理模型进行训练,从而预测具有微观结构的超材料等效材料属性。Deng 等[48]提出了一种基于神经网络的拓扑优化方法,讨论了隐含层数量对模型几何特征描述能力的影响,并实现了三维拓扑构型的快速预测。
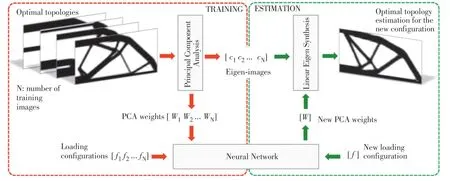
图9 基于神经网络的拓扑结构预测[46]Fig.9 Neural network-based topology prediction
深度学习与拓扑优化。Sasaki 等[49]进行了基于深度学习的拓扑优化研究,证明了在不同工况、不同模型情况下,与传统拓扑方法相比,卷积神经网络(CNN)训练得到的优化结果在结构性能上相似,但计算成本降低了10%~33%。Tan 等[50]针对微结构提出了一种基于深度卷积生成对抗网络(DCGAN)和卷积神经网络(CNN)的深度学习模型,其中DCGAN 用于生成满足几何条件的结构构型,CNN 用于预测相关力学响应。Wang 等[51]提出了一种用于结构拓扑优化的具有较强泛化能力的深度卷积神经网络,即使在只有一个边界条件的训练数据集中,其泛化能力也能使模型以一定准确性解决具有不同边界条件的拓扑问题。Nie 等[52]提出了基于深度学习的生成式拓扑优化模型TopologyGAN,在未知边界条件情况下,与传统cGAN 框架相比,TopologyGAN 框架在均方误差上降低了3 倍,在绝对误差上降低了2.5 倍,大幅提高了拓扑结构的预测精度,如图10 所示。
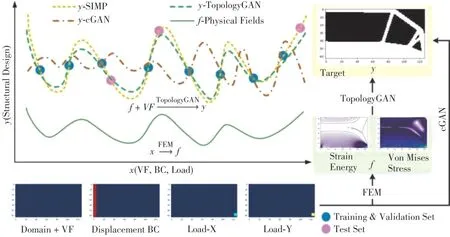
图10 基于深度学习的TopologyGAN 模型[52]Fig.10 TopologyGAN model based on deep learning
2.2 智能建造
智能建造(Intelligent Construction)是指将信息化、自动化、智能化与工程建造过程高度融合的建造方式[53],主要包括:施工现场智能管理、BIM、数字孪生、3D 打印和智能机器人等。
2.2.1 施工现场智能管理
传统的施工现场管理大多采用人工监察,存在效率低、排查慢、预防性差等问题,利用人工智能技术对施工现场进行智能识别、智能排查、智能报警,可有效避免各种违规行为,实现施工现场的智能管理[54]。
Park 等[55]提出了一种基于计算机视觉的施工人员安全帽佩戴检测方法,该方法首先在视频帧中识别人体和安全帽,再进行人体和安全帽的空间关系匹配,最后对未佩戴安全帽的施工人员发出相应警报。Yu 等[56]提出了一种基于图像骨架的参数化方法,该方法的核心理念是姿态引导,通过将动态行为转化为静态姿态来实现建筑工人不安全行为的实时监察。Fang 等[57]利用深度学习技术,进行了远程监控视频中施工人员安全帽佩戴的检测识别研究,根据施工现场视觉特征,将图像分为19 类数据集进行试验,结果表明,该方法的识别精度超过90%,如图11 所示。

图11 施工人员安全帽佩戴检测实例[57]Fig.11 Example of helmet wearing test for construction personnel
2.2.2 BIM
建筑信息模型(Building Information Modeling,BIM)是以建设项目信息数据为输入,通过整合建筑数据,实现建筑信息的共享传递,是建设项目物理设施和功能特性的数字化表达[58]。运用BIM 技术可有效排查图纸设计错误、降低方案优化成本、缩短施工工期、提高项目效益[59]。
Kwon 等[60]运用BIM 技术、图像匹配技术及增强现实技术开发了施工缺陷管理系统,该系统中的图像匹配功能可使质量检测无需在施工现场进行,降低了施工现场的返工成本,此外,还可自动检测施工现场的尺寸误差。白庶等[61]进行了BIM 在装配式建筑中的应用价值分析,认为利用BIM 技术可有效改善装配式预制件的生产流程,有助于装配式建筑向智能化、信息化方向发展。
2.2.3 数字孪生
数字孪生(Digital Twin,DT)是将现实世界中的物理模型映射到数字世界中,在虚拟的数字世界中形成与现实世界物理模型相对应的数字模型[62]。利用数字孪生技术可实现双向的信息交流与迭代优化,达到对现实世界物理系统的改善目的[63]。
Tao 等[64]提出了数字孪生车间的概念,设计了数字孪生车间的组成与运行机制,为数字孪生在生产制造环节的落地应用提供了基础理论支撑。谢琳琳等[65]通过集成BIM、物联网、大数据等先进信息技术,构建了基于BIM+数字孪生技术的装配式建筑项目调度智能化管理平台,实现了物理施工系统与虚拟施工系统间的实时交互,提高了装配式建筑调度的自主性、预测性与智能性。刘占省等[66]提出了基于数字孪生的智能建造方法框架,使用实时监测数据与理论模型进行对比,进而对物理空间的实际施工过程进行调整与修正,并以轮辐式索桁架智能张拉提升缩尺模型试验为例,进行了验证,如图12 所示。
2.2.4 3D 打印
3D 打印(3D Pinting,3DP)是以三维模型数据为输入,将结构模型转化为虚拟代码,通过切片软件及操作系统引导3D 打印机逐层积累材料,实现实体结构的成型。3D 打印是近年来最为热门的高新技术之一,具有无需机械加工、无需组装、设计空间无限制、实体制造精确、所需物理空间低等优点,已在诸多领域得到广泛应用[67]。
Perkins 等[68]回顾了3D 打印技术在建筑行业的应用状况,认为3D 打印技术与建筑行业智能化、信息化的发展方向十分契合。丁烈云等[69]对3D 打印的研究现状进行了梳理归纳,以需求为导向,将3D打印分为两大类:一类是代替人工面向大型构件、房屋建筑物的自动化建造,另一类是面向雕塑、异形构件的个性化制造,最后指出3D 打印技术距离应用到高层或超高层建筑的建造还有较大差距。
2.2.5 智能机器人
智能机器人(Intelligent Robot)是指按照计算机程序或施工人员指令工作,代替或协助施工人员完成施工任务的智能化机器设备。智能机器人的应用是保障施工人员安全、提升建筑工程质量的必然选择[70]。
车平等[71]针对钢桥梁腹板焊接形式开展了24、40 mm 两种板厚试件的机器人自动焊接研究,并将其应用到港珠澳大桥总拼钢主梁腹板对接中,发现采用机器人自动焊接工艺后,焊缝质量及焊接效率显著提升,焊接成本明显降低。周冲等[72]提出了一套面向预制PC 构件生产线的智能机器人系统,该系统拥有智能物流、柔性装配、智能检测等功能,实现了构件生产的智能化。郭俊可等[73]基于盾构施工特点对换刀机器人的精确定位技术进行了研究,认为基于视觉导航的刀具精确定位技术可应用于机器人换刀作业,并且机器人视觉导航定位精度可达0.5 mm,满足现场使用需求。
2.3 智能养维护
智能养维护(Intelligent Maintenance)是通过智能监测设备将远距离建筑或设施的健康数据连续不断的提供给数据处理智能系统,由智能系统发出养维护指令并提供数据分析结果[74]。近年来,越来越多的专家学者从视觉驱动和数据驱动两方面进行智能养维护研究,极大促进了养维护阶段的智能化发展。
2.3.1 视觉驱动的智能养维护
无人机(Unmanned Aerial Vehicle,UAV)是一种利用无线遥控设备或程序控制的飞行器,具有灵活性高、可装载高清摄像机在空中悬停等优点[75]。在土木工程领域,无人机能在不影响建筑结构正常运营情况下快速完成检测工作,极大程度地改善了建筑结构健康监测、评估方式及构件维护策略[76]。
Khan 等[77]利用装备了非接触多光谱成像系统的无人机,对桥梁表面裂缝进行健康监测研究,认为该系统在揭示引发桥面开裂原因及全面记录开裂位置等方面具有重要优势。Reagan 等[78]提出了一种结合使用无人机和三维数字图像的非接触式桥梁健康监测方法,经过对两座现役混凝土桥梁的长期监测,验证了该方法监测结构状态的准确性,利用该方法可监测10-5m 量级的桥梁几何变化。Kim 等[79]进行了基于商用UAV 和高分辨率视觉传感器的混凝土桥梁裂缝识别研究,利用深度学习算法检测结构表面裂缝,计算裂缝宽度和长度,并以某民用桥梁为例,证明了基于UAV 的桥梁检测方法能有效识别及量化结构裂缝,如图13所示。
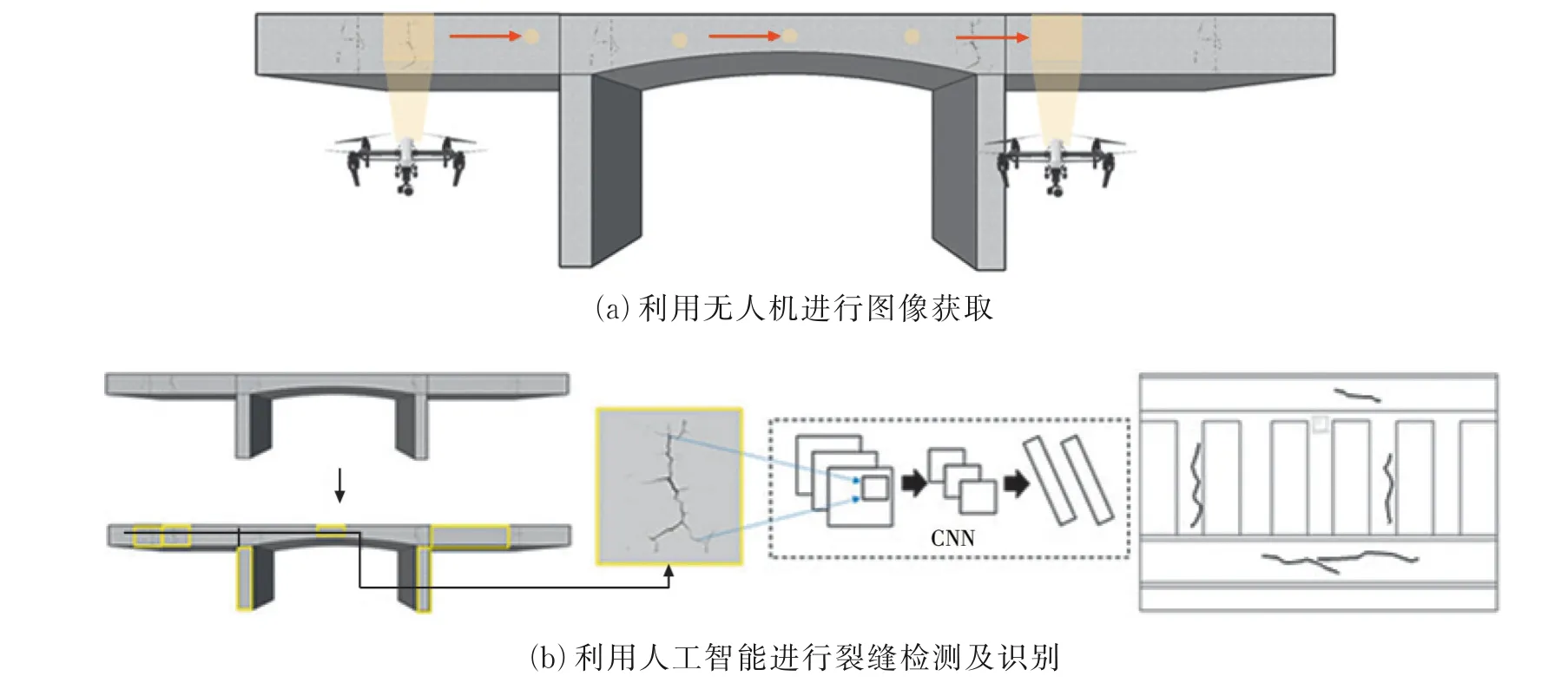
图13 基于UAV 的裂纹识别[79]Fig.13 UAV-based crack identification
此外,利用检测机器人可实现对结构的近距离检测,甚至可对结构内部的健康状况进行评估。王杰等[80]结合中国焊缝检测机器人发展现状,对近几年焊缝检测机器人的机械结构设计、检测传感器选择和导航跟踪控制3 个方面展开详细叙述。季云峰等[81]以斜拉索表观检测为研究对象,开发了能自动沿拉索爬升并完成斜拉索表观检测任务的智能检测机器人,该检测机器人具有小型化、快速自爬行、高质量图像采集、缺陷自动化识别等优点。
2.3.2 数据驱动的智能养维护
学生不理解施工图纸信息,难以完成相关工程量的计算。 但在工程造价电算化实训过程中,可以通过软件很好地解决学生结构施工图的识读问题。首先,利用计量软件进行建模或导入CAD图纸,然后在软件中各节点完成对钢筋信息的标注,最后生成相关构件,利用三维查看功能可观察各节点的钢筋构造。同时,学生还可通过平面施工图与软件三维模型进行对照,从中读取各个钢筋节点的内容。通过具体的图象可帮助学生理解二维平面图,提高学生的识图能力。
人工神经网络(Artificial Neural Network,ANN)是对人脑或自然神经系统的基本特征进行抽象模拟,由大量神经元按照不同权重进行信息传输的巨型复杂网络,具有并行计算、自组织、联想记忆等优点,被广泛应用于各种领域[82]。在土木工程领域的智能养维护中,应用人工神经网络可处理模糊、随机及不相容的信息,能在有噪声的情况下正确识别损伤部位,十分适合结构健康的在线监测和实时诊断[83]。近年来,越来越多的专家学者结合BP神经网络、GA-BP 神经网络、PSO-BP 神经网络、卷积神经网络等进行建筑结构智能养维护研究。
BP 神经网络与智能养维护。姜绍飞等[84]提出了将BP 神经网络与D-S 证据理论融合的损伤识别方法,充分地将神经网络非线性建模和D-S 证据理论不确定性推理进行有机结合,对来自复杂结构的多源信息进行融合,进而识别损伤。Pathirage 等[85]通过优化BP 神经网络模型,提出一种基于自编码器的结构损伤识别框架,用于解决振动特征与结构损伤间的非线性识别问题。谢晓凯等[86]针对大跨空间结构长期应力监测中数据缺失的问题,通过BP神经网络建立相关关系模型,对缺失数据进行重建修复,如图14 所示。Padil 等[87]针对结构损伤识别中主成分分析、建模误差和测量误差的不确定性,提出了一种非概率BP 神经网络方法,以压缩频响数据为输入,提高了训练效率及识别精度。

图14 利用BP 神经网络重建缺失数据[86]Fig.14 Missing data reconstruction using BP neural network
GA-BP 神经网络与智能养维护。Na 等[88]针对因结构健康监测数据不足而产生的损伤识别误差,进行了基于遗传算法的剪力结构损伤识别研究,在动态特性数据不足、结构刚度参数不准确的情况下,该研究可利用结构柔性矩阵推导结构损伤程度和损伤位置。Li 等[89]以车辆在不同状态下通过桥梁时的垂直加速度为初始响应,采用遗传算法进行损伤识别及定位,模拟结果表明,该方法能在考虑路面粗糙度和有噪声干扰的情况下对连续梁桥进行损伤识别。毛云霄等[90]采用遗传算法实现了桥梁结构不同损伤状态的识别,认为GA 算法能以较高效率实现桥梁多目标损伤识别,且桥梁跨中、3/4 跨的损伤识别结果较桥梁端部更为准确。
PSO-BP 神经网络与智能养维护。Mohan 等[91]利用PSO 算法对结构固有频率的变化进行裂纹识别研究,认为粒子群算法是一种鲁棒性强、效率高的裂缝检测算法,在裂纹数量较少的情况下,利用该方法仅使用三阶固有频率作为输入参数即可得到有效识别结果。许如锋等[92]以连续梁桥为研究对象,提出将伪比能变化率作为损伤识别指标,用改进PSO 算法优化BP 神经网络的权值和阈值参数,建立了PSO-BP损伤预测模型。徐菁等[93]用粒子群算法进行体育馆健康监测系统中传感器最优布点的研究,认为该方法具有更快的收敛速度和更稳定的优化结果,最后以西宁市体育馆双层球面网壳钢结构为例进行传感器优化布置,如图15所示。
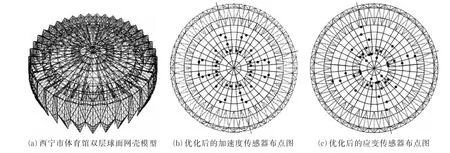
图15 基于PSO-BP 神经网络的传感器优化布置[93]Fig.15 Optimal arrangement of sensors based on PSO-BP neural network
卷积神经网络(Convolutional Neural Network,CNN)与智能养维护。Cha 等[94]利用深度卷积神经网络自主学习图像特征的能力,提出基于视觉的混凝土裂缝检测方法,在256 像素×256 像素的图像上训练,该方法设计的CNN 识别准确率为98%,与滑动窗口技术相结合,训练后的CNN 可扫描任何大于256 像素×256 像素的图像,如图16 所示。Abdeljaber 等[95]将卷积神经网络用于钢框架结构的损伤识别中,并基于1D-CNN 进行了9 种损伤工况下的健康监测研究。Atha 等[96]提出了一种基于卷积神经网络的金属表面腐蚀评估方法,讨论了颜色空间、滑动窗口及卷积神经网络结构对腐蚀评估的影响,如图17 所示。李雪松等[97]以IASC-ASCE SHM Benchmark 结构的数值模拟数据为研究对象,对16 个测点的加速度信号进行特征的自动提取及分类,分析了3 种特征在不同噪声情况下的识别准确率,证明卷积神经网络直接以加速度数据进行分类的有效性和稳定性。何浩祥等[98]为解决传统损伤识别方法对桥梁局部小损伤识别能力较弱的问题,提出利用卷积神经网络对桥梁损伤进行统计模式识别,通过逐层智能学习,实现更准确的特征自动提取和分类,从而进行损伤位置和程度的精准识别。
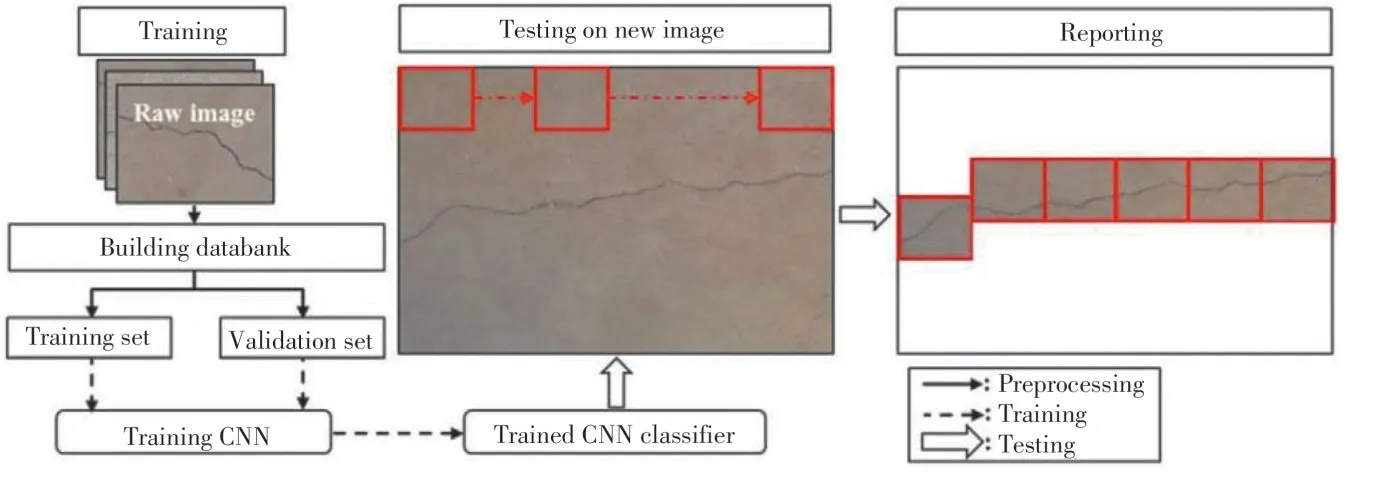
图16 基于CNN 的混凝土裂缝检测[94]Fig.16 CNN-based concrete crack detection
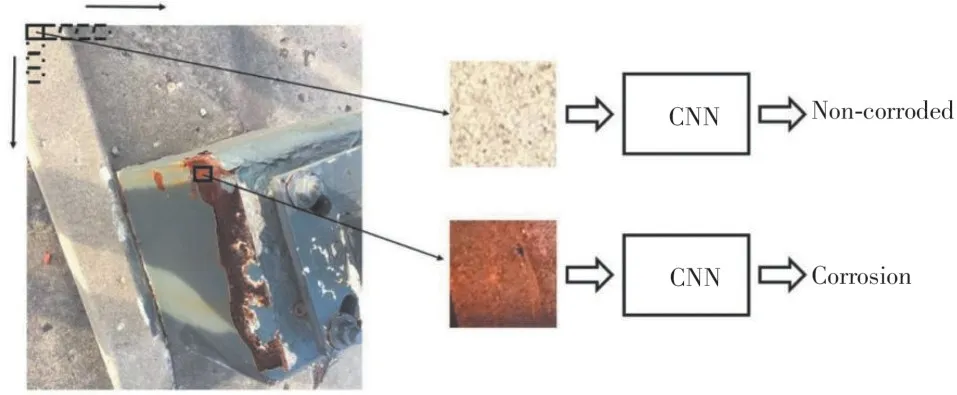
图17 基于CNN 的金属表面腐蚀评估[96]Fig.17 CNN-based corrosion assessment of metal surfaces
3 人工智能在土木工程中的应用研究趋势
人工智能在土木工程领域有着广泛的研究与应用,为建筑设计、生产建造、结构养维护提供了新理念、新方法,而在实际建设中,考虑到生产造价、建造技术、人员配备等因素限制,人工智能在土木工程领域的应用还未能全面普及。综合考虑人工智能在土木工程领域的研究现状,利用CiteSpace 文献分析工具,对中国知网(CNKI)数据库刊载的人工智能与土木工程的相关文献情况及研究热点进行可视化分析。总结中国研究现状、探索目前研究热点、发现未来研究趋势,并针对存在的问题提出发展建议,为人工智能在土木工程领域的相关研究提供参考。
数据来源于中国知网数据库,检索方式为基本检索,由于人工智能涵盖范围十分广泛,如智能设计方面的拓扑优化、智能建造方面的3D 打印等。难以将所有文献尽数统计分析,因此,在检索过程中,以人工智能为主题,选择学科分类里的建筑科学与工程,共检索出相关文献3 098 篇,在剔除会议报告、新闻宣传、硕博论文、图书专利等数据后,最终确定文献2 076 篇,将目标文献按CiteSpace 所需格式转码导出后,得到文献样本数据库。
对CiteSpace 参数进行设置。为探索自2000 年以来人工智能在土木工程中的研究现状,选择时间切片(Time Slicing)为2000 年至2021 年,时间分区长度(YearsPerSlice)为1;术语资源(Term Source)勾选标题(Title)、摘要(Abstract)、作者关键词(Author Keywords)及关键词拓展(Keywords Plus),节点类型为Keyword,连接强度算法为Cosine;剪枝算法选择具有完备性的Pathfinder 算法,剪枝策略选择Pruning slice network,视觉可视化效果为静态(Cluster View-Static)。
1)年发文量分析
年发文量代表科研成果的产出状况,是衡量人工智能在土木工程领域的研究热度与发展趋势的重要指标。如图18 所示,2015 年之前论文年发表量基本维持在10~30 篇,而2015 年之后,深度学习算法在语音和视觉识别上得到重大突破,人工智能在土木工程领域的关注度持续高涨,中国人工智能产业迅速发展,研究团队不断壮大,发表量逐年攀升。

图18 人工智能在土木工程领域的年发文量Fig.18 Annual publication volume of artificial intelligence in civil engineering
2)关键词频数及中心性分析
通过构建关键词共现网络,发现人工智能在土木工程领域的研究共有596 个节点和928 条连线,每个节点代表文献若干篇,节点越大则关键词的词频就越大,与该主题的相关性就越强,节点间的连线代表关键词间的共现关系。为更加清晰地展示人工智能在土木工程领域的研究现状,在共性参数的基础上,将关键词控制面板的阈值参数设为13(阈值0 为展示全部关键词),从而隐藏频数较低的关键词,最终关键词共现网络如图19 所示。经CiteSpace 处理后显示的高频关键词统计如表1 所示,关键词中心性统计如表2 所示。
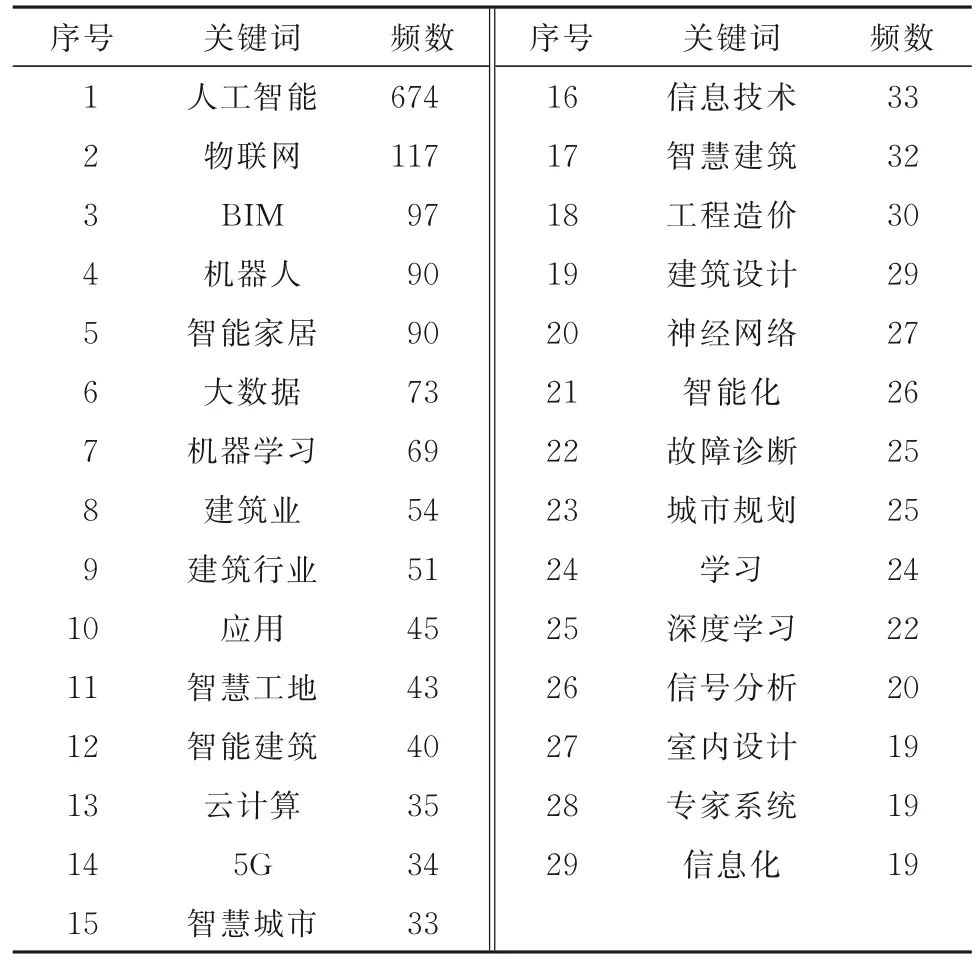
表1 高频关键词统计Table 1 High-frequency keywords statistics

表2 关键词中心性统计Table 2 Keywords centrality statistics
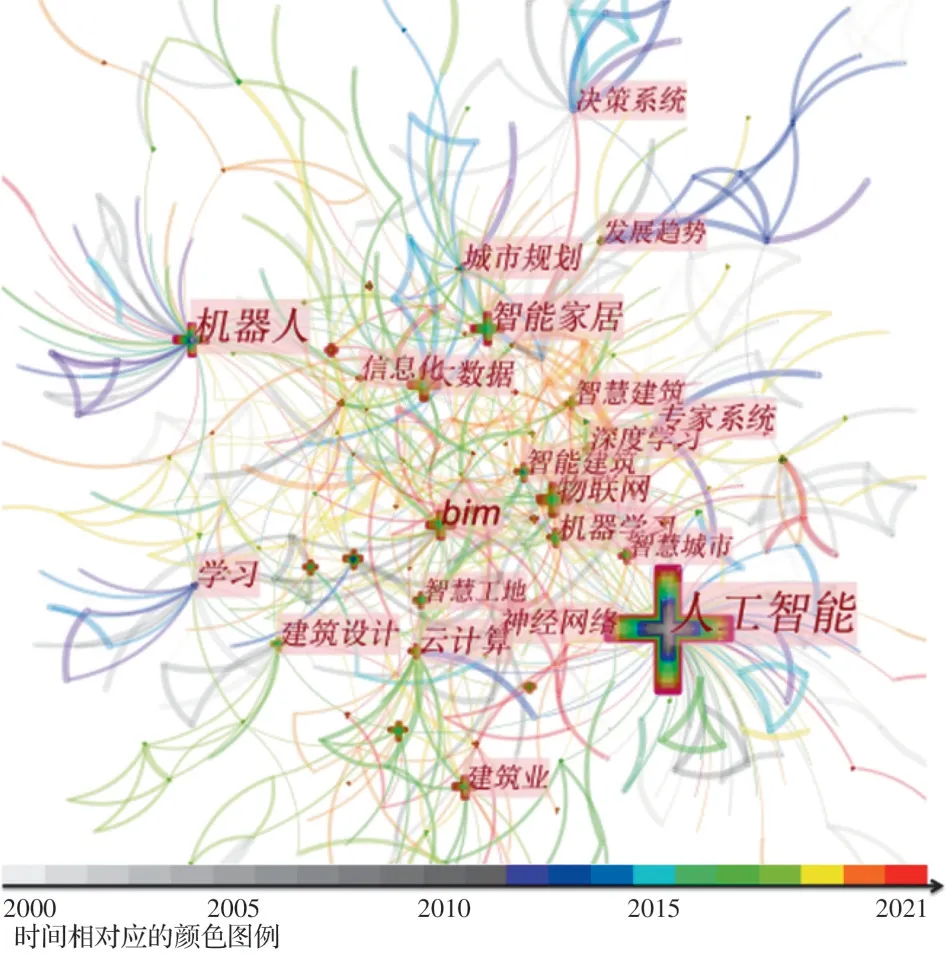
图19 关键词共现网络Fig.19 Keyword co-occurrence network
关键词是对文献内容的高度概括。由表1 可知,频数排名前5 的关键词为人工智能、物联网、BIM、机器人、智能家居,在一定程度上代表了人工智能在土木工程领域的研究热点,但不能代表近几年的发展趋势,还需结合图18 关键词共现网络及表2 关键词中心性统计进行综合分析。
中心性是关键词在共现网络中“媒介”能力的体现,是关键词间信息流大小的直观展示,图18 中十字形边界越大代表节点越重要,中心性越强。由表2 可知,中心性排名前3 的关键词为人工智能、机器人、BIM,其中人工智能始终贯穿土木工程智能化发展进程,中心性最高;智能机器人的研究涵盖了自然语言处理、计算机视觉、语音识别和交叉领域,在土木工程智能化发展中,智能机器人可应用于智能建造、智能养维护等方面;BIM 的研究同样得到了极大关注,在建设项目全生命周期内均有应用。
由表1、表2 对比可知,关键词的频数和中心性在排名上有一定差异,表明人工智能在土木工程领域的研究热点在一定程度上不太分明。其中,频数和中心性排名均靠前的关键词有人工智能、机器人、BIM,是人工智能在土木工程领域的热点主题;云计算、学习、信息化的关键词中心性较大,说明这些关键词的中介作用十分明显,虽然频数相对较低,但其中介作用使之成为人工智能在土木工程领域发展的有效切入点。
由图18 可知,中国土木工程领域的研究以人工智能为核心,围绕深度学习、BIM、机器人、决策系统、建筑设计等不同方向进行,整体上呈分散状,不局限于单一研究热点。其中与智能技术相关的关键词,如深度学习、神经网络、云计算、物联网等集中在一起,且这些关键词在表1、表2 中均有较高的频数和中心性,代表这些关键词相关性较强且研究较多,是促进土木工程行业向高效、智能、可持续方向发展的关键。此外,图18 的关键词共现网络是特定域中的静态表示,不能反映人工智能在土木工程领域内研究主题的变化,还应考虑关键词共现网络中的时间因素。由时间图例可知,自2015 年起,云计算、信息化、大数据、机器学习、神经网络、深度学习等方向的关键词得到了持续关注,是近几年土木工程智能化的研究重点。
3)关键词时序演进分析
利用CiteSpace 中的爆破检测算法,可统计一定时期内引起专家学者普遍关注的关键词,如表3 所示,是人工智能在土木工程中相关文献的突现关键词统计。关键词强度值越高,代表所考虑时间间隔内得到的关注就越多;突现关键词在一定时期内可发生变化,反映出对应时期内的研究趋势,红色横线部分是关键词突现的时间范围,据此可判定该阶段的前沿主题。根据突现关键词的起止时间,将人工智能在土木工程中的研究归纳为2000—2010 年的初级阶段和2011 年至今的现阶段。
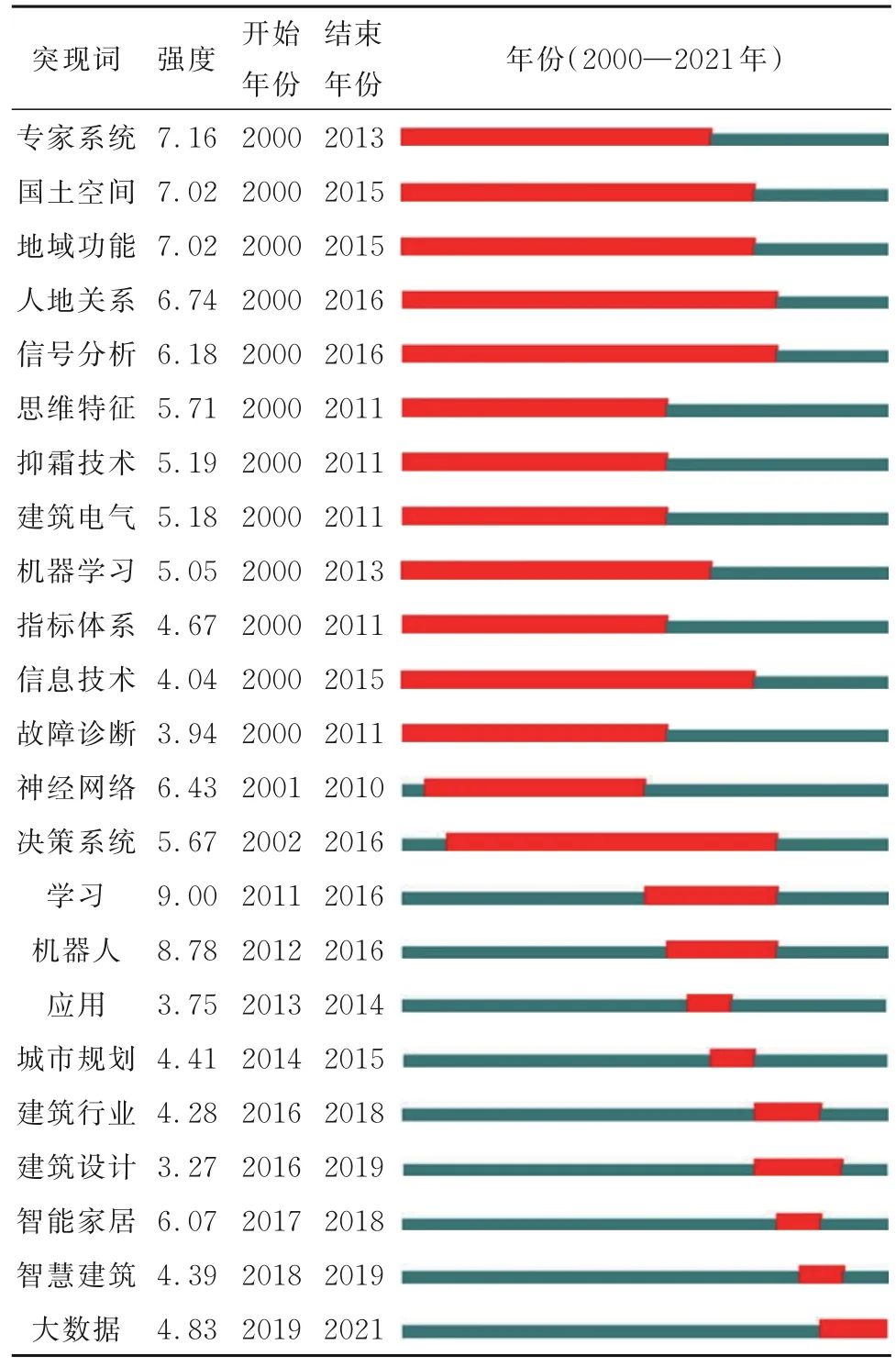
表3 突现关键词统计Table 3 Emergent keywords statistics
人工智能在土木工程中研究的初级阶段(2000—2010 年)。突现关键词的时间跨度较长,均保持在10 a 左右,各个研究方向均衡发展,主要进行了专家系统、人地关系、机器学习、神经网络等初级人工智能的探索,智能化程度较低。其中,专家系统的强度值为最高的7.16,表明早期人工智能在土木工程领域的探索集中在专家系统的研究;随着人工智能技术的不断进步,机器学习、神经网络等方向逐渐被众多学者所研究,尤其是神经网络的强度值达到了6.43,在初级阶段中处于较高水平。表明后来专家学者主要进行人工神经网络的研究,促进了土木工程领域的智能化发展。
人工智能在土木工程中研究的现阶段(2011 年至今)。突现关键词的变化较为显著,时间跨度基本保持在2~3 a,表明现阶段是人工智能在土木工程领域的高速发展期,每过几年就有新的智能技术得到突破,越来越多的专家学者加入到土木工程智能化的研究,智能化程度也越来越深。其中,学习的强度值为最高的9,表明现阶段主要进行学习相关的研究,如智能化较低的机器学习与智能化较高的深度学习;最后的突现关键词是大数据,表明现阶段研究朝着数字化、自动化、信息化、智能化的方向进行;此外,突现关键词还包含了智能家居、智慧建筑、建筑设计等不同应用方向,表明现阶段的智能化发展较为全面,各个方向均有涉及。
4 展望
运用CiteSpace 软件对2000 年以来中国人工智能在土木工程领域的研究成果进行文献计量和可视化分析,明确该领域的研究现状、研究热点和前沿主题,结合土木工程领域智能化发展的实际需要,对今后的发展前景做出展望。
1)重视人工智能在土木工程领域各方向的均衡发展。目前,人工智能作为促进土木工程领域向数字化、自动化、信息化和智能化发展的有效手段,得到了普遍关注与研究,如智能设计方向的拓扑优化研究,智能建造方向的BIM、3D 打印研究。智能养维护方向的无人机、人工神经网络研究,但各研究方向发展不均衡,接下来应扩展人工智能在土木工程领域的研究范围,积极探索人工智能在土木工程领域不同方向的尝试。
2)强化土木工程领域的智能化研究深度。根据前沿研究文献及上述可视化分析可知,现阶段研究主要集中在神经网络、大数据和深度学习等方向。相较于以往研究,智能化程度越来越高,接下来应深入探求更高水平的智能技术,如智能算法、智能科学家、强化学习等。
3)扩展人工智能在土木工程领域的适用情境和服务对象。产业应用是推动人工智能在土木工程领域发展的重要驱动力,为促进人工智能在土木工程领域的快速发展,近年来,中国出台了众多人工智能产业的相关政策。然而在土木工程领域,相较于智能化研究水平,智能化应用程度仍然较低,接下来,应加强人工智能在土木工程领域的实际应用,真正把科学研究应用到实际生产中,从而实现土木工程领域高效、智能、可持续发展。
4)加强跨机构、跨领域的合作研究。目前,人工智能在土木工程领域的创新研究有了一定积累,但在土木工程各研究方向的融合发展尚有所欠缺。接下来应建立土木工程各研究方向的人工智能协同创新体系,解决不同研究团队间的集成度不高、信息孤岛等问题,以人工智能技术为切入点,实现土木工程全生命周期智能化发展的最终目标。
5 结论
定性梳理了自然语言处理、计算机视觉、语音识别、交叉学科这4 个人工智能基础研究领域的相关研究,定量分析了智能设计、智能建造和智能养维护的研究现状,利用CiteSpace 可视化软件总结人工智能在土木工程领域的研究趋势并进行展望,得到以下结论:
1)人工智能在土木工程基础研究领域中均有应用,但整体智能化程度较低,实际应用也存在一定局限性,后续研究应结合大数据、深度学习、强化学习等智能技术,促进土木工程在基础研究领域的智能发展。
2)智能设计、智能建造、智能养维护的相关研究及应用较为广泛,但智能化发展不均衡,各阶段主要集中在某一方面或某一问题的研究,接下来应关注土木工程全生命周期的整体智能化发展,提高土木工程各阶段智能化水平。
3)现阶段人工智能技术得到极大关注,众多研究团队开展了土木工程领域智能化研究,但大多集中在某一方向的研究,各研究方向的融合发展尚有所欠缺,接下来应打破信息壁垒,促进各研究团队间智能技术的交流合作,推进土木工程智能研究的协同发展。