级联式低频触发器信号的抗干扰传输研究
2024-04-07陈志飞
陈志飞
(中微半导体(上海)有限公司,上海 201306)
0 引言
低频触发器又称激励器或唤醒器,由发射场发射带载波数字信号。低频触发器通过幅度键控(amplitude shift keying,ASK)调整技术与曼切斯特编码技术发射数字信号,可用于水下、地下、汽车、金属等环境。这些数字信号可以被特定的设备或有源标签解码,进而还原为原始的数字信号,从而实现信息的传递和接收。低频触发器直接发送基带数字信号。基带数字信号通过无线或纤维通道长途传输时,会产生一定的干扰,从而影响信号传递。
陈静等[1]研究了一种导航信号频域干扰抑制方法。该方法在傅里叶变换的基础上,通过加窗、混叠和数字自动增益控制等方法干扰频域,以达到信号抗干扰的目的。但是该方法易受不同干扰源的影响而导致同步信号传输效果较差。冯建利[2]研究了基于跳频技术的调频连续波(frequency modulated continuous wave,FMCW)雷达超宽带调频抗干扰方法。该方法可以很好地解决差频信号的频谱混叠问题。但是由于级联式低频触发器是自动执行的,其控制信号随机性较高,导致该方法应用后不能保证较高的同步信号传输正确率。ADIL[3]提出了一种应用于全双工系统的数字自干扰信号消除方法。但是该方法受到干扰信号带宽以及不同干扰源的影响较大。MARUTA[4]利用大规模天线阵列的自由度来抑制用户间干扰和小区间干扰,并基于数据辅助样本矩阵反演的多模算法和最小均方误差权重推导,成功地实现干扰抑制。受级联式低频触发器同步控制过程中直通现象的影响,该方法传输效果较差。
级联式低频触发器运行过程中,受并联运行级联式低频触发器产生的脉冲干扰以及运行环境中的噪声干扰等多种干扰源的影响,其信号传输效果较差。其中,噪声是主要的干扰源。在噪声干扰影响下,触发器电路可能会错误地将噪声信号识别为实际信号,产生误报或误触发现象从而陷入死区,造成输出信号不稳定的问题。因此,为了优化级联式低频触发器同步控制信号传输效果、减少噪声干扰对信号传输的影响,本文提出了新的抗干扰传输方法。该方法在利用变换观测矩阵分离正常信号和干扰信号的基础上,通过自适应频谱估计器进行干扰检测,并根据检测结果采用自适应时变滤波法抑制干扰,从而实现级联式低频触发器同步控制信号抗干扰传输。试验结果表明,所提方法具有较好的抗干扰效果,优化了级联式低频触发器同步控制信号的传输性能。
1 信号分离
本文假定各传感器之间的时延差异忽略不计,级联式低频触发器同时接收多个信号,基于随机近端梯度张量分解[5]接收到的信号。处理结果Q为:
(1)
式中:n为取样数,个;R为不知名来源的矩阵;W为未知信号源的混杂参量;E为噪声信号矩阵。
当混合矩阵和源信号矩阵未知时,观察到的信号矩阵被转换为:
Y=T×Q
(2)
式中:Y为信号矩阵转换结果;T为分离参数。
信号振幅和序列的不确定性是导致信号分离效果差的两大因素。信号振幅不确定处理式为:
(3)
式中:U为信号振幅不确定处理结果;r、e分别为标量乘积与信号的相对能量值;wi为i阶分离函数;t为信号不确定性系数。
本文采用欧氏距离度量相似度,对信号次序不确定性进行分析[6]。本文将信号分离目标函数写作:
(4)
式中:o为信号分离结果;pij为距离函数;l′为分解参数。
若信号矩阵太大,信号分离效果将降低。为提高信号分离目标函数的稳定性,本文通过增大迭代数对目标函数进行优化,从而为下一步准确估计干扰信号奠定基础。
2 干扰检测估计
信号分离后,本文检测干扰情况,引入自适应频谱估计器估计信号带宽,以确定干扰信号的中心频率[7]。
(5)
式中:z为干扰信号的中心频率,kHz;ci为i阶干扰信号带宽估计值;vi为i阶信号带宽的估计参数;M为信号分解参数;x(t)为正交变换参数。
干扰信号是时变[8]、非平稳的信号。本文采用时间轴的形式将其划分为若干个数据块,直至划分的数据块时长最少。
(6)
式中:T′为干扰信号划分后的时间序列。
数据块中包含平稳信号与不平稳信号。其中,不平稳信号为干扰信号[9]。在此基础上,本文构建代价函数。
(7)

低频触发器接收的信号响应与信号的频率和干扰源[10]的位置有关。在持续采样时间内,干扰信号的阵列响应相对一致。为保证一致性[11],干扰信号的协方差等于干扰源数量。为分析干扰信号的阵列响应的一致性,本文作近似处理。
(8)
式中:v为近似处理结果;α为持续采样时间,s;D为接收阵列的最大基线长度;b为一致性误差参数。
3 抗干扰处理
检测后的干扰信号存在次序模糊问题[12]。为准确获取有用信号,本文采用维格纳威利分布(Wigner Ville distribution,WVD)二次型交换方法进行处理。该方法将能量主要集中于信号的瞬间频率,能有效获取有用信号。本文将信号的WVD表示为:
(9)
式中:ω为解析信号;o′为变换参数;h′为交叉项干扰数,个;ζ为加窗函数。
本文将处理后t1时刻接收的输入信号表示为:
(10)
式中:Kt1为t1时刻处理后的信号;J为不同的干扰信号;nm为第m个信号的阵列响应值。
信号处理后,为有效抗干扰,本文设定约束条件和最优权值。其计算式为:
(11)
式中:g为接收信号的自相关函数;f为约束参数;d为约束解;s为线性最小方差。
在上述处理的基础上,本文需要去除信号噪声。最大信噪比的最优权值为:
Q′=S×A0
(12)
式中:S为最大特征值;A0为提取的干扰信号及噪声信号的处理参数。
经过上述处理后,本文采用自适应时变滤波算法抑制干扰。
自适应时变滤波算法原理如图1所示。
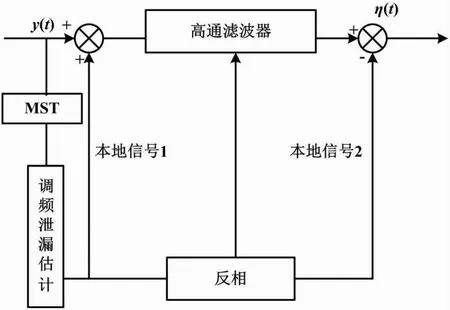
图1 自适应时变滤波算法原理
图1中:最小生成树(minimum spanning tree,MST)算法对信号进行滤波和降噪;y(t)为输入信号;η(t)为输出信号。
(13)
式中:r(t)为采集的本地信号;L1k(t)为信号中的低频参数;Ai为i阶干扰分量信号。
抗干扰算法对每种信息有一定的先验信息。在处理时,本文令补偿系数相乘,并将干扰剔除,得到以下表达式:
(14)
式中:N′为位置变量;V2为目标距离位置参数;x、δ均为线性卷积参数。
上述过程实现了级联式低频触发器同步控制信号抗干扰传输。
抗干扰传输流程如图2所示。
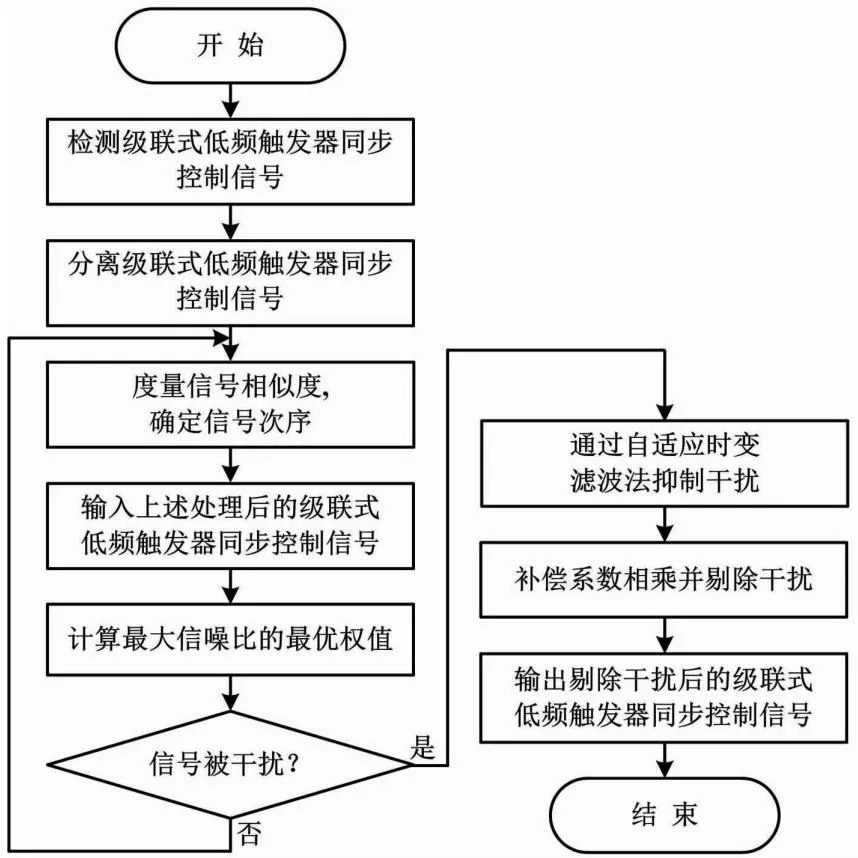
图2 抗干扰传输流程图
4 试验对比
为验证同步控制信号抗干扰传输方法的有效性,本文进行试验,并将试验结果与文献[1]导航信号频域干扰抑制方法和文献[2]基于跳频技术的抗干扰方法的应用效果进行对比。
4.1 试验准备
试验对象为RW-R750型级联式低频触发器。该级联式低频触发器的具体参数如下。
①激活范围。触发器标配2组棒状天线。每组棒状天线系统的半径为0~3.5 m。所有天线组合在一起时的整体最大可扩展识别范围为1 000 m2。
②激活速度。最大通过速度为400 km/h时,触发器可被激活。
③激活能力。触发器可同时激活500张以上的标签。
④激活角度为全向。
⑤中心频率为125 kHz。
⑥标准接口为晶体管-晶体管逻辑(transistor-transistor logic,TTL)、RS-485接口。
⑦电源标准为直流电源。该电源的电压范围为7.5~18 V、电流范围为1 000 ~3 000 mA。
⑧工作温度为-40~+85 ℃。
本文将RW-R750型级联式低频触发器应用于某车间人员监测中。激活器使用2×2阵列主动发射连续低频脉冲信号。配套的低频激活标签持续打开低频接收功能。当收到激活器的激活信号时,该标签的低频芯片将首先实时解析出该激活器的编号,同时检测出该低频脉冲信号的信号强度;然后唤醒并传入微控制单元(microcontroller unit,MCU)单片机;接着打开板载的2.4 GHz无线射频芯片进行一次强信号发射。其中,激活器的信号分别为跳频源信号和阻断信号,即第一个信号是有效的,第二个信号受到了来自车间环境噪声的干扰。通过过滤噪声和放大功率,可以生成阻塞的噪声干扰信号。采样周期为1.6 s。跳变信号的频率为3 200 Hz,平均分为每块长20 Hz的160块。根据上述过程,试验准荷阶段采集3×105个400 MHz频段上的信号。
4.2 试验过程
为保证试验有效性,本文根据4.1节的试验准备进行模拟试验。试验前对采集的信号进行盲源分离。盲源分离过程具体如下。
(1)盲源分离。
①通过示波器展示400 MHz频段上采集的信号。
400 MHz频段上的采集信号如图3所示。
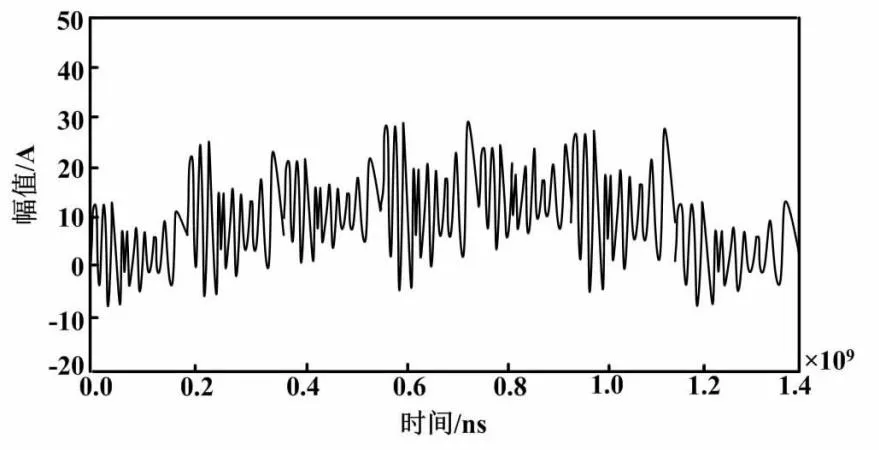
图3 400 MHz频段上的采集信号
②本文采用等电点值衡量方法对图3所示的信号进行分离。等电点值定义为:
(15)
式中:αi为i阶信号;ζij为i阶和j阶之间的信号元素;k″为全局函数。
PI值越接近0,代表信号分离的效果越好。
③利用示波器输出分离后的盲源信号。
盲源信号分离结果如图4所示。
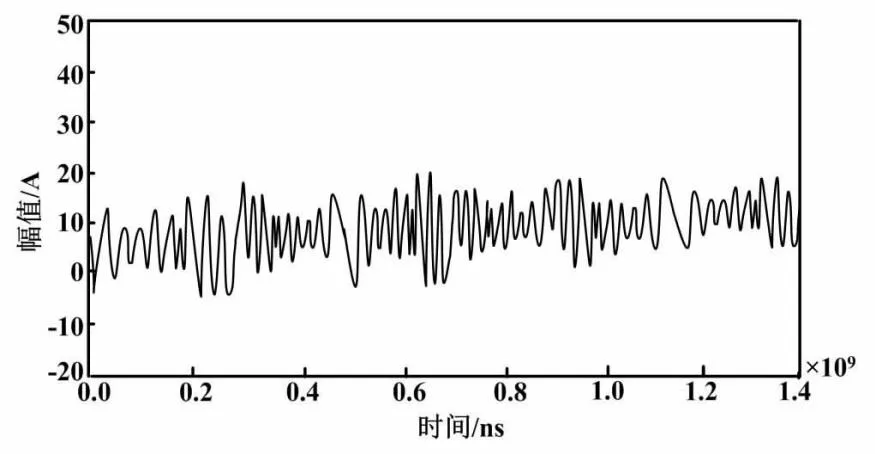
图4 盲源信号分离结果
由图4可知,本文提出的抗干扰传输方法能有效获取信号和信号的幅度变化情况,并对信号按照高低幅值(即信号峰值与基准线之间的距离)作初始划分。但是信号存在次序模糊的问题,故仍需进一步处理。
(2)自适应时变滤波法处理。
本文采用所提自适应时变滤波法抑制分离后的盲源信号,并提取时域波形。
处理后的时域波形如图5所示。
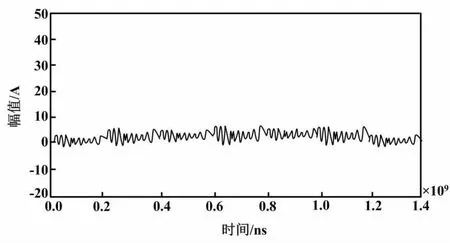
图5 处理后的时域波形
(3)根据上述步骤滤除噪声干扰,获得处理后的信号。
(4)以获得的信号为基础进行信号抗干扰试验,并输出结果。
4.3 信号抗干扰效果分析
①噪声干扰滤除效果。
噪声干扰滤除效果测试过程中,本文以图5为原始图像,分别利用所提方法、导航信号频域干扰抑制方法和基于跳频技术的抗干扰方法这三种方法对噪声干扰进行滤除。滤除后的信号幅值波动幅度范围越小,表明噪声干扰去除效果越好。
三种方法的噪声干扰滤除效果如图6所示。
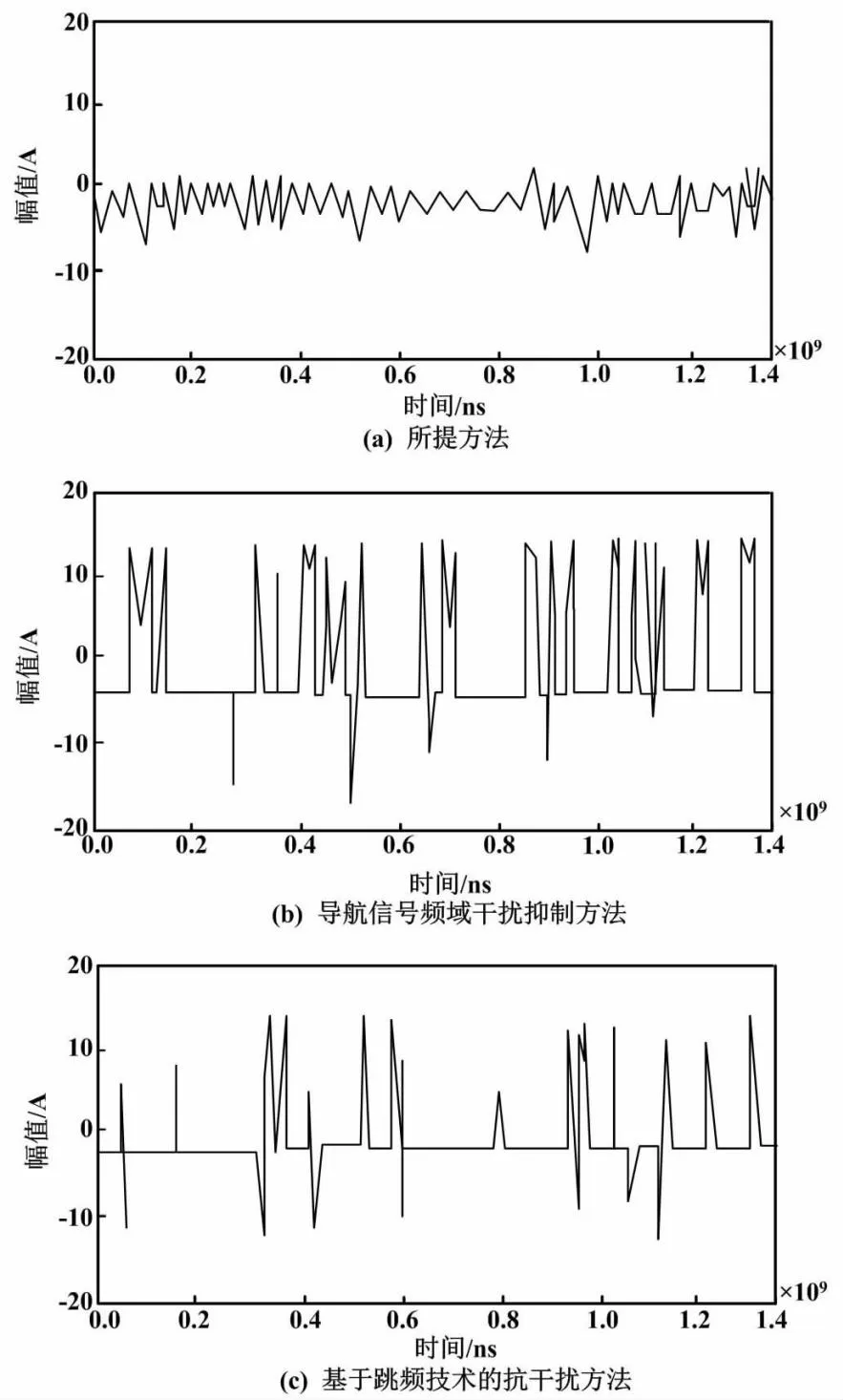
图6 三种方法的噪声干扰滤除效果
由图6可知,导航信号频域干扰抑制方法以及基于跳频技术的抗干扰方法对图5级联式低频触发器同步控制信号时域波形中的噪声干扰去除后,获取的信号幅值波动范围为[-12 A,12 A]。该噪声干扰滤除结果不理想。所提方法能够有效滤除级联式低频触发器同步控制信号中的噪声。滤除噪声干扰后的信号幅值波动范围为[-2 A,+0.3 A]。该波动范围较两种对比方法更小。由此可知,所提方法获取了更优的噪声干扰滤除效果,保留了级联式低频触发器同步控制过程中的信号特征,为后续抗干扰传输奠定了坚实的基础。
②信号频率波动情况。
在不同欧氏距离度量相似度下,本文对比三种方法传输跳频源信号的信号频率波动情况,以判断三种方法的抗干扰性能。
信号频率波动情况如图7所示。
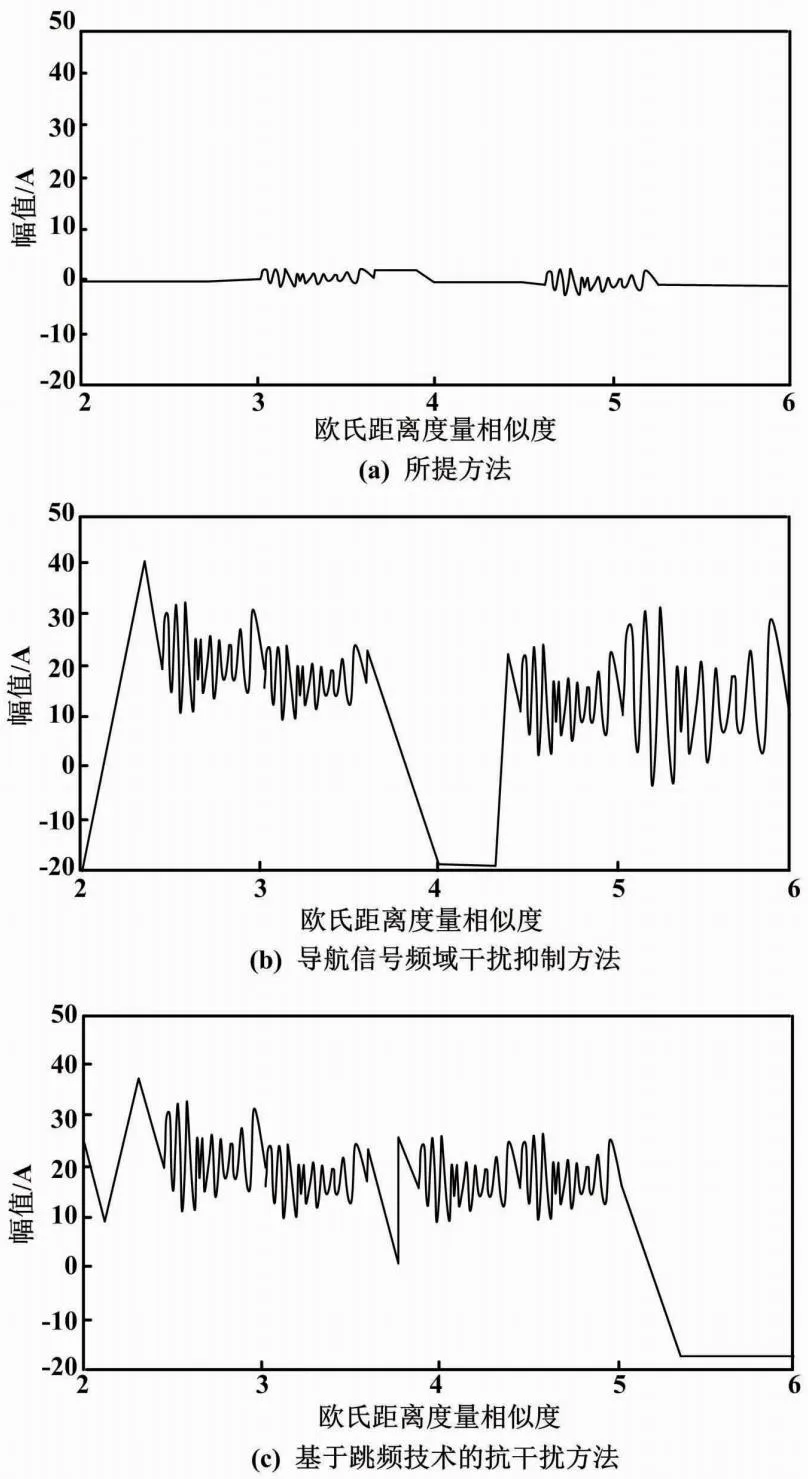
图7 信号频率波动情况
由图7可知,经所提方法处理后的信号频率较为平稳,能将信号控制在[-1,1]。该结果表明,所提方法对级联式低频触发器同步控制信号的检测率较高,不容易出现误判。两种对比方法处理后的信号频率忽高忽低。其原因可能是由于级联式低频触发器同步控制信号较弱、噪声对信号分离产生较大影响,并且对信号排除不全面,导致无法真正消除干扰信号。
为了进一步量化信号频率波动情况,本文将级联式低频触发器同步控制信号检测率作为指标。信号检测率是正确检测出信号的样本数与实际存在信号的总样本数的比例。在2~6欧式距离度量相似度下,本文分别采用三种方法,使用Tektronix公司的TDS3000C系列示波器,对级联式低频触发器同步控制信号进行检测,以获取级联式低频触发器同步控制信号通过3×105个400 MHz频段时的检测成功次数。
三种方法的信号检测率如表1所示。
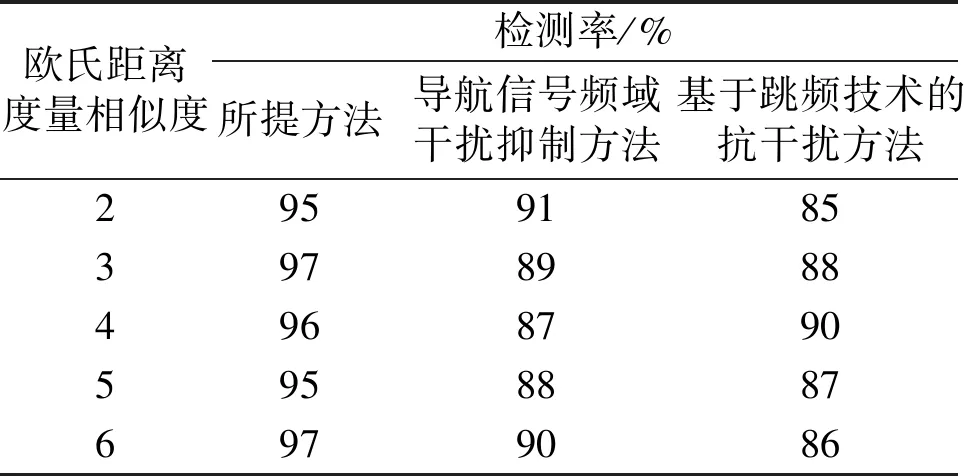
表1 三种方法的信号检测率
由表1可知,在不同欧氏距离度量相似度下,所提方法的信号检测率均高于95%;导航信号频域干扰抑制方法信号检测率位于88%~91%之间;基于跳频技术的抗干扰方法的信号检测率位于85%~90%之间。对比三种方法的信号检测率测试结果可知,所提方法的级联式低频触发器同步控制信号检测率最高。
③不同信干比下的信号正确检测率。
信号正确检测率指在不同的信干比下的多个测定值中,满足限定条件测定值的所占比例。在数字通信系统中,信干比常常以达到某个误码率作为判决标准。本文利用Keysight N5991的误码率测试仪计算接收端的误码率,并计算该误码率下需要的信干比,从而计算信号正确检测率。信号正确检测率λ为:
(16)
式中:ψy为检索正确的级联式低频触发器同步控制信号数量,个;ψ为检索到的级联式低频触发器同步控制信号总数,个。
λ值越高,表明对应方法的级联式低频触发器同步控制信号检测正确率越高,抗干扰传输效果越好。由此,本文对比不同方法的信号正确检测率。
不同信干比下的信号正确检测率如图8所示。
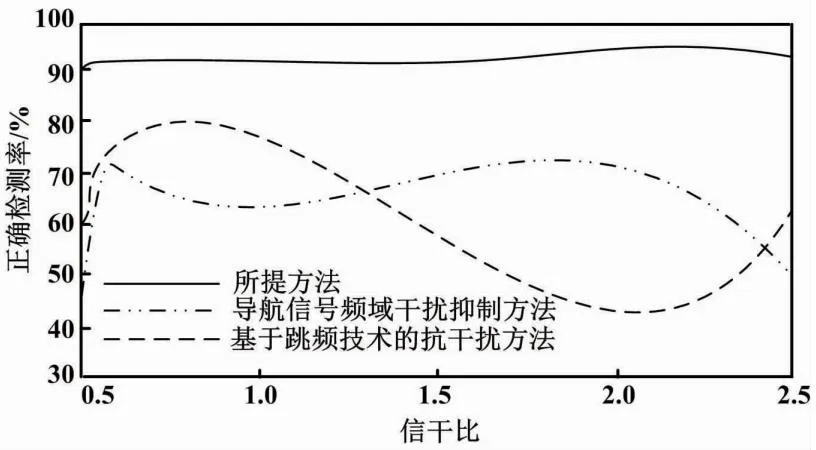
图8 不同信干比下的信号正确检测率
由图8可知,所提方法受到信干比的影响较小,具有较高的信号正确检测率,其值能够达到90%以上。两种对比方法的信号正确检测率在80%以下。其原因在于级联式低频触发器同步控制信号强度差别较大,受到读取距离的影响较大,且抗干扰效果较差,导致更加容易出现误判。
④不同读取距离下的信号传输丢包率。
丢包率指测试中所丢失信号传输包数量占所发送信号传输组的比率。级联式低频触发器同步控制信号传输过程中受到读取距离的影响,会造成不同程度的丢包率。为了保证30 dB环境干扰中的传输效果,试验利用Tektronix TBS1000B-EDU Series型号的数字存储示波器进行采样。数据包大小为1 200 B。本文以0.5 m为间隔,测试三种方法在1.0~3.0 m读取距离下的信号传输丢包率。信号传输丢包率越低,表明对应方法抗干扰传输性能越好。
不同读取距离下的信号传输丢包率如图9所示。
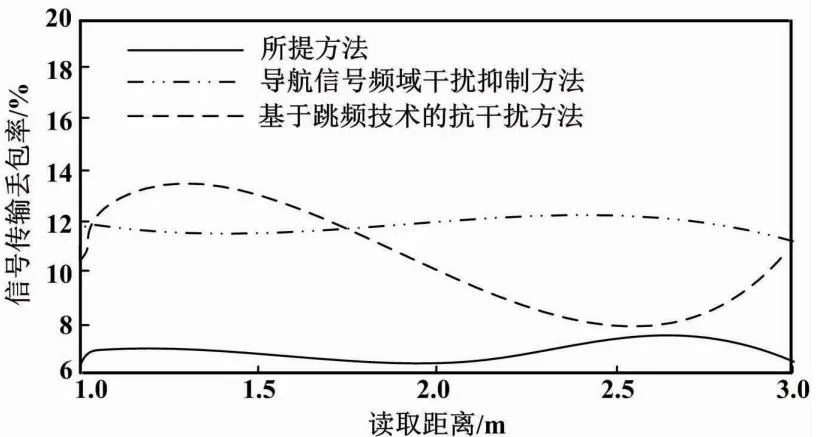
图9 不同读取距离下的信号传输丢包率
由图9可知,在同一干扰环境中,所提方法受到读取距离的影响较小,级联式低频触发器同步控制信号传输丢包率低于7%。两种对比方法的级联式低频触发器同步控制信号传输丢包率在8%~14%之间。由此可知,所提方法的级联式低频触发器同步控制信号传输丢包率较低、抗干扰传输性能较好。
5 结论
本文提出级联式低频触发器信号抗干扰传输方法。该方法的创新点是在获取信号时对信号进行了滤波处理,并采用补偿系数补偿信号,增强了级联式低频触发器同步控制信号传输过程中的抗干扰性能。试验结果表明,该方法能有效滤除信号干扰,发送正确信号,为相关领域提供帮助。
