500 kV超高压变电站安全巡视路径自动化寻优研究
2024-04-07赵梦露蔡志强宋仁杰李春晓
赵梦露,蔡志强,宋仁杰,李春晓,程 盛
(国网安徽省电力有限公司超高压分公司,安徽 合肥 230000)
0 引言
变电站是电力系统电流、电压转换的重要场所[1]。为了保证能量顺利转换,变电站内包含多种类型的电力设备。由于变电站日常工作的不间断运行要求,需要对变电站的故障隐患进行快速处理[2]。因此,变电站安全巡视检查已经成为不可或缺的工作内容之一。考虑到500 kV超高压变电站的规模较大,人工巡检无法满足变电站安全巡检要求。巡检机器人等智能化辅助工具的应用,降低了巡检工作压力。智能化背景下,安全巡视路径的优化已成为重点研究问题。
文献[3]以加强巡检机器人避障能力为目标,设计以动态避障规则为基础的巡检导航控制系统;应用蚁群算法优化导航所提供的巡检路径,得到具有自主导航避障性能的最优巡视路径。但是,该方法规划效率较低。文献[4]对概率路径图算法规划的巡检路径进行分析,以减少路径拐点为目标,并利用随机采样结果建立初始巡检路径网络图;通过最大化保留性抽稀算法提取网络中关键路径节点,并剔除无作用节点,以减少路径拐点数量,生成最优安全巡视路径。但是,该方法避障效果较差。文献[5]考虑到巡检机器人运动存在障碍物碰撞现象,通过栅格单位建立移动环境模型,引入A*改进算法优化原始安全巡视路径。但是,该方法规划路径拐点较多。
为了解决上述路径自动化寻优方法的不足,本文以500 kV超高压变电站为研究对象,提出基于机器视觉的安全巡视路径自动化寻优方法。
1 安全巡视路径自动化寻优方法设计
1.1 构建变电站安全巡视环境模型
由于变电站工作场景内包含多种类型的变电设备,安全巡视场景较为复杂。安全巡视路径的自动化寻优处理需要依托于500 kV超高压变电站巡视区域的环境信息。其需准确划分出巡视机器人可自由运动空间,以及巡检区域内的障碍物分布情况[6-7]。本文利用巡视机器人上安装的监控摄像机,获取运动过程中的全局场景信息。本文设置安全巡视背景为静态场景。为了更好地提取前景目标、准确地实现目标检测和跟踪,本文通过背景帧差法获取巡视区域内的障碍物信息。
变电站背景帧差如图1所示。
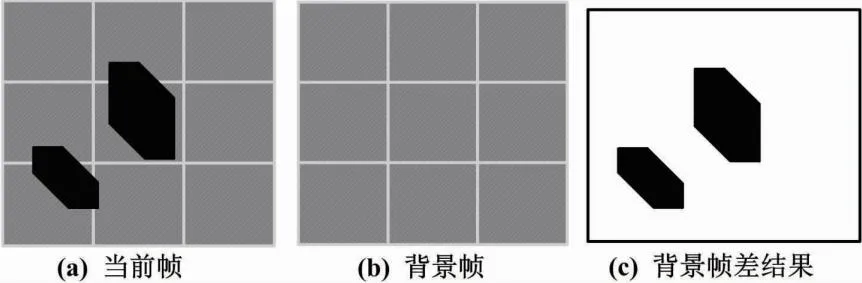
图1 背景帧差示意图
结合当前帧和背景帧,可以将背景帧差表示为:
(1)

本文通过背景帧差法得到变电站安全巡视区域的障碍物边界,并获取巡视环境信息。本文依托于安全巡视环境,构建巡视机器人工作环境模型。具体操作过程中,本文将工作场景转化为由一组规则栅格构成的离散阵列[8]。栅格内的每个格子都可以作为运动单元。分析变电站实际工作场景可知,安全巡视空间的运动单元呈现4种形式,分别是自由运动单元、障碍物单元、巡检机器人占据单元以及目标单元。
1.2 设计机器视觉定位技术
巡视路径的自动化寻优,需要以巡检机器人的定位信息为基础。本文根据安全巡视环境模型,依托于机器视觉原理实现机器人位置准确定位[9]。本文采用加速稳健特征(speeded up robust feature,SURF)分析方法提取特征点。这需要以Hessian矩阵为基础。
(2)
式中:H为Hessian矩阵;L为特征系数;α为高斯滤波偏导系数;β为对称系数;m为矩阵行数;n为矩阵列数。
Hessian矩阵行列式为:
ΔH=Lmm(α,β)×Lnn(α,β)-Lmn(α,β)2
(3)
为了降低计算复杂度,本文采用近似盒滤波技术进行进一步计算。
近似盒滤波模板如图2所示。
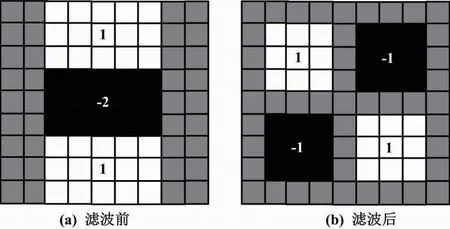
图2 近似盒滤波模板
本文通过Hessian矩阵计算出每个特征点的极值,并与周围邻近点进行比较,以提取候选特征点。本文对候选特征点进行差值运算,输出有效特征点,并通过尺度空间对比建立可缩放的特征空间[10]。为了保证特征空间在旋转过程中不会发生变形问题,本文需要对邻域内的Hessian小波进行分析,提取出矢量最长的方向,以充当特征点的主要运动方向。本文应用欧氏距离计算特征点,基于机器视觉采集的当前场景视频帧,以及巡检机器人正常运动参考帧,得到特征点匹配结果。本文通过匹配特征点极值,确定500 kV超高压变电站安全巡视机器人的实际位置。
1.3 建立路径自动化寻优目标函数
本文根据安全巡视机器人当前定位信息,采用机器视觉、人机交互相结合的方式,提取出变电站安全巡视初始路径。初始路径获取工作主要包括3个环节:①针对带有标记点的手背运动路径[11],利用机器人巡检相机获取该点的坐标系;②建立手背标记点坐标系和人手手背坐标系,并分析2个坐标系之间的关联性;③与安全巡视机器人坐标系进行合理变换,得出巡检机器人运动路径。
本文通过手眼标定方法,将人手手背与巡视机器人监控相机保持在相同位置[12]。本文采用位姿估计方法获取标记点坐标下人手手背的齐次变换矩阵。
(4)
式中:θ为标记点坐标下食指指尖齐次变换矩阵;f1为机器人坐标系下食指指尖齐次变换矩阵;f2为相机空间中手背Mark点齐次变换矩阵。
根据式(4)读取手背标记点的运动路径。该路径即变电站安全巡视初始路径。
安全巡视路径的自动化寻优,本质上是从多条路径中选取最短运动路径,从而提升变电站安全巡视效率。考虑到机器人巡视需要保证良好的避障性能,所以在路径自动化寻优方法设计过程中设计了避障约束条件。本文将最优规划路径点看作机器人末端姿态点。考虑到初始巡视路径包含无数个路径点,本文需要设置路径起点和路径终点。在已知安全巡视机器人运动空间的情况下,可以根据障碍物位置坐标计算每个障碍物的包围球半径,并汇总计算结果以组成向量集。本文以最短巡检路径长度为目标,设置500 kV超高压变电站安全巡视路径自动化寻优目标函数为:

(5)
式中:f为巡检路径长度,m;M为路径点总数,个;i为路径点;xi、yi、zi为路径点i的坐标信息,m;xi+1、yi+1、zi+1为下一路径点坐标信息,m。
变量设计过程中,由(M-2)个路径点组成的巡检路径为:
P(xi,yi,zi)i=2,3,…,M-1∈S(xi,yi,zi)
(6)
式中:P为最平滑巡检路径;S为路径点取值范围,m,其值由起点和终点共同确定。
为了保证巡视机器人的避障性能,路径自动化寻优函数的约束条件为:
hi,k,i=1,2,…,M,k=1,2,…,p≥Qk,k=1,2,…,p
(7)
式中:k为巡检障碍物,m;p为巡检区域障碍物总数,个;h为路径点与障碍物之间的距离,m;Q为障碍物的包围盒半径。
结合变电站安全巡检空间要求,得出路径优化的运动学约束条件为:
P(xi,yi,zi)i=2,3,…,M∈T
(8)
式中:T为变电站安全巡检空间。
1.4 获取变电站安全巡视最优路径
为了求解变电站安全巡视最优路径,本文提出以粒子群优化(particle swarm optimization,PSO)算法为基础的求解算法。本文将安全巡视区域设置为1个路径搜索空间,并设置空间内包含数个粒子。为了处理PSO算法的原始粒子,本文提出将随机生成算法与求解算法相结合,获取初始化粒子;通过输出迭代计算,获取全局最优安全巡视路径。为了避免巡检路径的寻优陷入局部最优,本文利用个体极值和全局极值,对PSO算法的原始粒子进行飞行距离、飞行方向的调整。
(9)

每次迭代计算都会引起粒子种群的更新,则更新粒子的空间位置为:
(10)
最优变电站安全巡视路径求解过程中,为了避免因种群粒子运动速度过快而无法求解出最优路径信息,本文将粒子飞行速度限定范围设置为δ∈[δmin,δmax]。其中:δmin为最慢飞行速度;δmax为最快飞行速度。
粒子速度限定范围往往为粒子种群搜寻空间的25%~30%。本文根据实际情况合理调整范围参数。为了避免PSO算法求解出现陷入局部最优的问题,本文提出向PSO算法中添加权重因子,建立全局寻优PSO求解算法。改进后的粒子飞行速度为:
(11)
式中:λ为权重因子。
(12)
式中:λstart为初始权重值;λend为迭代终止时权重值;Ψ为PSO运算总迭代次数,次。
根据式(11)、式(12)可知,惯性权重粒子的增大,直接导致了安全巡视路径全局寻优能力的提升,同样也造成了局部寻优能力的降低。本文将收敛因子引入PSO算法中,以提升超高压变电站安全巡视路径自动化寻优收敛速度。更新后的粒子飞行速度为:
(13)
式中:ε为收敛因子。
(14)
式中:r为搜索空间边长。
本文将所提PSO算法应用于安全巡视路径寻优中。本文按照路径点巡视信息采集时间,将整条安全巡视路径划分为多个分段。本文提取出每个分段的中心节点,以此充当每个搜索空间的中心点。本文研究所有分段搜索空间,设置每段搜索空间内包含的路径点具有相同的节点姿态。综上所述,在安全巡视最优路径搜索过程中,本文只需要考虑路径点位置信息。
PSO搜索空间如图3所示。
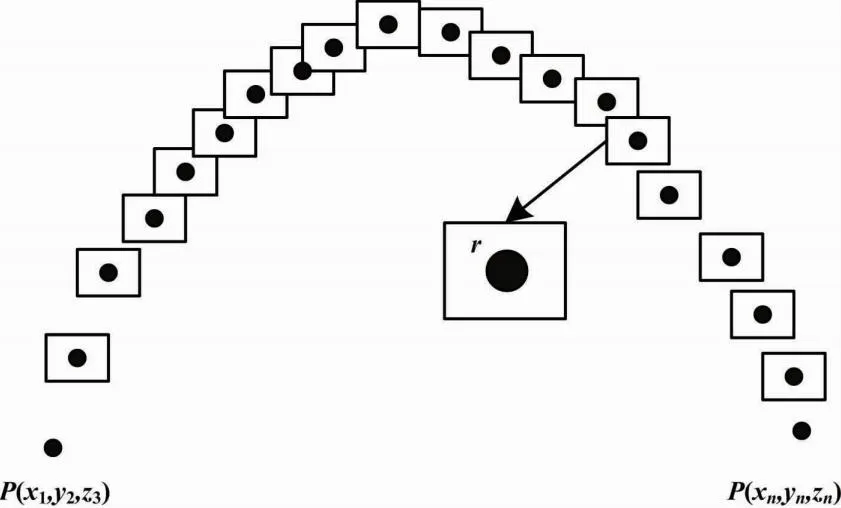
图3 PSO搜索空间示意图
由图3可知,本文计算空间内相邻路径点的距离,将所有路径点距离相加设置的目标函数作为适应度值计算的数据基础。本文在每个分段的搜索空间中提取出1个路径点,并连接路径点以形成最优安全巡视路径。为了保证最优巡视路径求解结果的合理性,本文采用碰撞检测方法进行测试。本文提取出现碰撞问题的路径点,对其所在的分段搜索空间进行缩小处理,并重新定位PSO粒子的位置和速度,直到不再发生碰撞问题时停止碰撞检测。
同时,为了满足运动学约束条件,本文针对求解出的最优路径进行求逆解处理,以避免自动化寻优生成的路径中包含巡视机器人无法到达的路径点。若存在路径点不在运动空间内的情况,本文需要采用式(10)更新粒子位置,再采用式(13)更新粒子速度。本文在搜索空间内生成另一个符合运动学约束条件的粒子,以调整优化的安全巡视路径。
2 仿真试验
2.1 试验参数
针对本文提出的自动化巡视路径寻优方法,本文以典型变电站空间环境为仿真试验背景,设计仿真试验。为了保证试验结果的真实性,本文选取基于蚁群优化方法、基于混合免疫粒子群方法以及基于人工蜂群方法作为对照组,在同样的仿真试验环境下进行变电站安全巡视路径寻优测试。本文对比不同路径寻优方法的应用效果,明确所提方法的先进性。
在仿真环境中,基于巡检机器人的运动特点,本文利用SolidWorks工具对500 kV超高压变电站安全巡视机器人进行建模,并对机器人建立安装坐标系。监测区域为20 m×20 m。节点初始能量为2 J。节点通信半径为8 m。数据包产生率为0~10 packet/s。控制包尺寸为10 B。行动路径为1 m/s。种群数为50。最大迭代次数为200。学习因子为1.5。允许最大时延为5 s。仿真时间为180 s。本文应用所提方法和其他3种常规方法得到最优巡视路径。为了加强试验结果的可信度,本文应用每种寻优方法进行10次试验,并汇总所有试验结果以计算试验数据的均值。
2.2 建立环境栅格图
为了保证仿真试验的顺利进行,本文在仿真环境中建立1个20×20的试验环境栅格图。环境栅格图中:左上角圆形标注点为500 kV超高压变电站安全巡视起点;右下方星号标注点为安全巡检目标点。除此之外,环境栅格图中黑色区域为障碍物,巡检机器人无法通行。
试验环境栅格如图4所示。
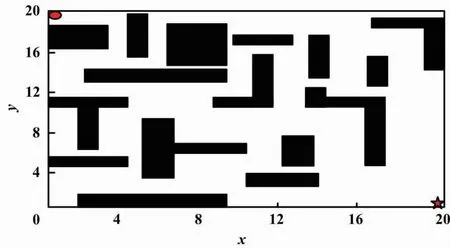
图4 试验环境栅格图
本文应用Matlab仿真软件进行变电站安全巡视最优路径自动化选取,定义巡检机器人的主要执行动作为上、下、左、右这4类,结合自动化寻优方法执行流程,以求解出最优巡视路径。
2.3 路径寻优结果分析
在试验环境栅格图中,本文采用所提方法、基于蚁群优化方法、基于人工蜂群方法以及基于混合免疫粒子群方法获取最优安全巡视路径。
路径寻优结果对比如图5所示。
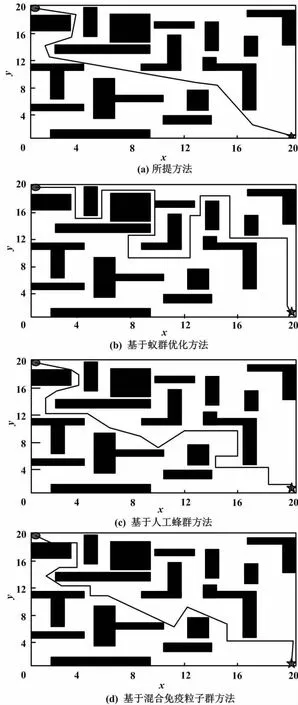
图5 路径寻优结果对比图
通过图5可以明确不同方法在复杂变电场景下搜索的最优安全巡视路径。针对路径寻优结果,本文以最优路径长度为评估指标进行分析。
试验所应用的集中寻优方法均不涉及势场,且安全巡视的动作步长统一为1 m。所提方法搜索的最优路径长度为35.98 m,而其他3种方法得到的最优安全巡视路径长度分别为65.28 m、53.12 m与48.39 m。综上所述,所提方法与其他寻优方法相比,所得出的最优路径长度分别缩短了44.88%、32.27%、25.65%。这表明了所提方法的优越性。
3 结论
为了满足500 kV超高压变电站安全巡视工作要求,本文依托于机器人视觉技术,建立巡视路径自动化寻优方法。本文从巡视区域的环境信息入手,利用机器视觉技术完成巡视机器人当前位置的精准定位;以此为基础,建立路径寻优目标函数;通过PSO算法获取自动化安全巡视路径寻优结果,保证最优路径长度较短,以提升超高压变电站安全巡视效率。后续以寻优算法为研究重点,应用遗传算法对所提路径优化求解算法进行改进,以期得到更好的路径寻优结果。
